基于改进混合高斯模型的运动目标检测方法①
2017-05-17张国平高兆彬中国石油大学华东计算机与通信工程学院青岛266580
张国平, 高兆彬(中国石油大学(华东) 计算机与通信工程学院, 青岛 266580)
基于改进混合高斯模型的运动目标检测方法①
张国平, 高兆彬
(中国石油大学(华东) 计算机与通信工程学院, 青岛 266580)
针对传统高斯模型易将背景显露区域检测为前景问题与对复杂场景下噪音处理效果差的缺陷, 提出了一种混合了三帧差算法的改进混合高斯模型算法. 利用三帧差算法快速确定背景显露区域与前景的优势, 提高了算法对背景显露区域的适应性; 提出一种背景模式邻域更新法, 提高了对复杂背景噪音的抗干扰性. 通过实验证明, 该算法与传统方法相比, 在复杂背景下减少了大量噪音, 学习周期短, 提高了对天气、摄像头震动等干扰的抗性, 优化了背景显露引起的“影子”噪音问题.
混合高斯模型; 运动目标检测; 帧差法; 复杂背景; 邻域更新法
1 前言
人类接收外界信息有80%以上是来自视觉, 视觉是人类最重要的交流方式. 而传统的摄像头监控系统,达不到人类的智能程度, 很难满足人们对智能监控的要求, 智能视觉监视系统成为一门热门的研究课题.其中, 运动目标的检测是整个系统的最底层, 也是整个系统的基础, 一种好的目标检测算法可以提高整个系统的性能. 目前常用的运动目标检测算法有背景差法[1-3]、帧差法[4-7]、光流场法[8-10]和统计模型算法[11]等.
混合高斯背景模型最早由Stauffer等人在文献[12]中提出, 在固定摄像头的交通监控中, 基于混合高斯模型的背景差分法是一种常用的方法, 该方法为每个像素点建立一个高斯模型, 具有对背景自适应性高、更全面的描述复杂背景的优点. 同时针对不同场景, 对于混合高斯模型算法存在的缺陷, 很多文献[13-15]都给出了自己的改进方法. 文献[13]利用混合高斯模型与帧差算法结合区分背景显露区域与前景区域; 文献[14]利用分块思想改进混合高斯模型, 加快背景的收敛, 提高了计算速度; 文献[15]中提出的利用帧间差法, 快速分离前景目标建立简单背景模型的方法, 节约背景的学习时间. 以上算法没有利用低复杂度算法兼顾改进传统高斯模型的存在一些缺陷: 1)在复杂的背景下, 传统混合高斯模型算法收敛速度慢, 对因天气如, 树木摆动、水温波动等此类因素引起的噪音的收敛速度慢, 处理效果较差; 2)对震动引起的摄像头的轻微震动适应性差; 3)当静止物体突然运动逃离背景时, 传统算法可能会把背景显露区域检测为前景, 因此产生类似于“影子”的噪音. 如何降低这些因素影响达到更高效的追踪效果, 是本文研究的重心.
本文通过提出一种新的邻域更新法改进传统高斯模型的背景模式, 建立区域像素点之间的联系, 优化上面提出的问题1)和问题2); 利用三帧差算法检测背景显露区域来调整背景模式的学习率来优化问题3),提高背景显露区域的收敛速率.
2 传统混合高斯背景模型
混合高斯模型能有效适应光线变化和多模态场景,抗干扰性强. 它是一种直观的概率密度模型, 反映了某段时间内图像运动的统计特征.
2.1 背景图像的生成
背景图像中的每一帧与每一个像素值并不是一成不变, 由于天气等变化因素的影响, 会使背景像素变化.
在混合高斯模型中, 对图像中每个像素点建立K个高斯模型, 为了保持合适空间与时间复杂度, K的取值在3-5之间, 对于每个像素点Xt, 用K个高斯分布函数的概率密度函数加权和来建模:

其中k为分布模式总数, η(xt, μi,t, τi,t)为t时刻第i个高斯分布, μi,t为其均值, τi,t为其协方差矩阵, δi,t为方差, I为三维单位矩阵, ωi,t为t时刻第i个高斯分布的权重, K个高斯模型的权值和应该为1.
2.2 混合高斯模型参数更新
对每个像素值Xt与K个模型进行匹配, 如果∣Xt-μi,t-1∣≤ 2.5σi,t-1则匹配成功, 如果K个模型都不匹配,则认为匹配失败.
若匹配成功, 对于所有模型按照公式(4)进行权值的更新; 未匹配模型均值μ与标准差σ不变, 对于匹配的模式Mk,t=1,未匹配的模式Mk,t=0并按照公式(5)和(6)分别更新均值μ和方差σ:


以上公式之中, α为学习率, 本文设置为0.01.
若匹配失败, 则权重最小的模式将被替换, 即该模式的均值为当前像素值, 标准差为初始较大值, 权重为较小值.
2.3 背景模型选择及前景检测
各个模式根据ω/α2按照降序排列, 权重大、标准差小的模式排列靠前, 选前B个模式作为背景, B满足如下公式, 其中参数T标示背景所占比例:

将像素点与前B个高斯分布进行匹配, 如果匹配成功, 则该点为背景点, 否则该点被检测为前景点. 2.4 一种创新的背景模式邻域更新法
在传统的混合高斯模型中, 认为像素之间相互独立, 各点之间像素没有联系. 对于水纹, 树叶波动等因素的影响, 混合高斯模型具有一定的抗干扰性, 但在复杂背景下的适应能力比较差, 产生大量噪音; 而对于意外的摄像头小幅度震动产生的噪音是致命的.以上问题可以总结为像素点的小幅度移动产生的影响, 针对以上情况我们设计背景模式邻域更新法, 每个像素点的取值会考虑它周围八个点的像素值, 在小区域内建立了一种逻辑联系, 对以上问题进行优化.
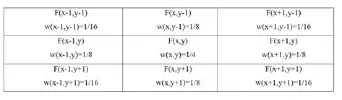
图 1 像素点F(x,y)的八邻域及权值
在背景图像的生成时, 我们对于每一个像素Xi在匹配成功的时候, 我们用公式:

来代替Xi代入公式(4) (5) (6)更新背景模式, 在新增背景模式时也利用该公式作为均值建立背景模式. 式(9)中映射F代表对应点的像素值, 映射w代表对应点的权值, Σ w=1. 改进的混合高斯背景建模, 建立了像素点之间的逻辑联系, 对于因摄像头震动、树叶摇晃引起的噪音有更好的自适应性, 复杂度小, 学习周期更短.
3 利用三帧差算法快速更新背景显露区域
3.1 三帧差分法
三帧差分算法是相邻两帧差分算法的一种改进方法, 它选取连续三帧视频图像进行差分运算, 能够消除由于运动而显露背景影响, 从而提取精确的运动目标轮廓信息. 该算法的基本原理是是先选取视频图像序列中连续三帧图像并分别计算相邻两帧的差分图像,然后将差分图像通过选取适当的阈值进行二值化处理,得到二值化图像, 最后在每一个像素点得到的二值图像进行逻辑与运算, 获取共同部分, 从而获得运动目标的轮廓信息.
其中最关键的就是阈值T的选取问题, 实验中,阈值过小会产生较多噪音, 阈值过大会使大量的运动点被忽略; 同时由于在差分结果图像中前景区域像素灰度值变化比较大且混合高斯模型不能自适应消除,背景区域的变化较小满足高斯分布, 所以对我们可以采用3σ准则设定阈值门限. 阈值T=3σ, σ为差分图像背景区域的方差.
3.2 利用帧差法确定背景显露区域
利用三帧差算法, 快速确定运动目标区域与背景显露区域. 提取连续的三帧图像:I(k-1),I(k),I(k+1)

由此我们可以得到运动的背景显露区域(BG)与运动区域(FG):

3.3 改进背景显露区域学习率
在检测大而慢的运动目标或者由静止转化为运动状态的目标时, 传统高斯模型检测会出现“影子”现象,将背景显露区域检测为运动目标, 在更新率不变的情况下, 背景模型需要一段时间去适应. 为了快速去除“影子”影响, 本文对不同区域运用不同的学习率α.
对于运动区域FG, 采用与背景相同的固定的更新律; 对于背景显露区域BG采用新的背景更新率. 由静止状态转变为运动状态的目标会因背景显露造成大量噪音, 在背景显露区域BG, 对于权值采用以下更新策略:

在背景显露区域进行利用上式更新率加快该像素点的更新, 给该像素值一个较高的权值, 缩短了学习周期.
4 检测算法流程图
本文算法通过循环的获取视频每帧图像, 利用三帧差算法快速确定其背景显露区域, 提高背景显露区域的学习率, 利用邻域更新法更新背景模式. 背景模式更新完成后, 再利用背景差分法匹配出前景目标.具体的流程图如图2所示.

图2 本文算法流程图
5 实验结果
5.1 实验一
汽车运动后的第八帧图像如图3所示, 我们对图3红色区域内两种算法处理的效果进行比较.
传统算法处理效果如图4所示; 本文算法处理效果如图5所示. 由图4与图5得对比可以看出, 对于复杂背景, 本文的算法比传统的混合高斯模型具有更好的抗噪效果, 在图4下方有大量因树木摆动引起的噪音; 而利用改进算法对于风力引起植物的晃动有更好的适应性.

图3 汽车开始运动后的第8帧(原图)

图4 传统混合高斯模型对红色区域处理的结果

图5 本文算法对红色区域处理的结果
由图6和图7相比我们可以看出, 本文算法在静止物体运动后第8帧消除了影子, 而传统算法在第17帧才达到图7效果, 收敛速度提高2.1倍, 更快的消除了背景显露区域引起的“影子”噪音.

图6 截取图4中汽车细节

图7 截取图5汽车细节
当出现因为摄像头震动产生的噪音时, 两种算法的处理结果如图8和图9所示.
由图8与图9的对比可以看出, 本文算法对摄像头在复杂背景下的小幅度震动有更好的适应性, 更适应实际需求.

图8 传统高斯模型对震动处理结果(第26帧)

图9 本文算法处理结果(第26帧)
5.2 实验二
我们对一段不存在前景的视频进行试验, 测试两种算法背景模式描述的准确程度. 视频中存在天气造成的水纹、植物摆动等干扰因素, 采用系统抽样的方法, 从100帧中抽取十帧对噪音点数量进行比较, 每帧共921600个像素点. 该视频中一辆普通轿车占像素点在1200-1500之间. 提高率计算公式:
提高率(%)=(传统算法噪音点数-本文算法噪音点数)/ 传统算法噪音点数

表1 噪音统计结果
根据表1数据计算得到传统算法的期望、方差分别为3494, 1134.4; 本文算法期望, 方差分别为158.6, 22.98. 综合来看本文算法的噪音数量, 稳定性都要优于传统算法.
6 结语
本文提出了一种更适合于处理复杂背景的改进的混合高斯模型算法, 本算法结合三帧差算法与一种新的背景模式邻域更新法改进了传统混合高斯模型算法.提高了复杂背景下对于水纹、树木晃动以及摄像头震动等引起的噪音的适应性和收敛速率, 并且能更快的处理由于静止物体开始运动产生的“影子”噪音问题,更适合于实际的运动目标检测.
1 Wu JR, Du XL, Liu HT. An improved adaptive background modeling algorithm based on Kalman filter. Transducer & Micro System Technologies, 2012.
2 Kirch W, Spahn H, Ohnhaus EE, et al. An approach to motion vehicle detection in complex factors over highway surveillance video. 2009 International Joint Conference on Computational Sciences and Optimization. IEEE Computer Society. 2009. 520–523.
3 Li GM, Li Y, Xiao WM. A background modeling algorithm based on pixel frequency. Asia-Pacific Youth Conference on Communication Technology. 2010.
4 Zhan C, Duan X, Xu S, et al. An improved moving object detection algorithm based on frame difference and edge detection. International Conference on Image and Graphics. 2007. 519–523.
5 Chen C, Zhang X. Moving vehicle detection based on union of three-frame difference. Advancesin Electronic Engineering, Communication and Management, 2012, (2): 459–464.
6 Migliore DA, Matteucci M, Naccari M. A revaluation of frame difference in fast and robust motiondetection. Polymer International, 2006, 51(2): 105–110.
7 Zhang L, Shao Z, Wu JD, et al. A moving object detection method based on improved three-frame difference algorithm and edge information. International Conference on Advances in Mechanical Engineering and Industrial Informatics. Atlantis Press. 2015.
8 李广,冯燕.基于SIFT特征匹配与K-均值聚类的运动目标检测.计算机应用,2012,32(10):2824–2826.
9 Bhattacharyya S, Maulik U, Dutta P. High-speed target tracking by fuzzy hostility-induced segmentation of optical flow field. Applied Soft Computing, 2009, 9(1): 126–134.
10 Baby RM, Ahamed RR. Optical flow motion detection on raspberry pi. Fourth International Conference on Advances in Computing and Communications. 2014.
11林洪文,涂丹,李国辉.基于统计背景模型的运动目标检测方法.计算机工程,2003,29(16):97–99.
12 Stauffer C, Grimson WEL. Adaptive Background Mixture Models for Real-Time Tracking. IEEE Conference on Computer Vision and Pattern Recognition, IEEE Computer Society. 1999. 2246.
13刘静.混合高斯模型背景法的一种改进算法.计算机工程与应用,2010,46(13):168–170.
14张燕平,白云球,赵勇,等.应用改进混合高斯模型的运动目标检测.计算机工程与应用,2010,46(34):155–157.
15 Migliore DA, Matteucci M, Naccari M. A revaluation of frame difference in fast and robust motiondetection. Polymer International, 2006, 51(2): 105–110.
Improved Moving Object Detection Method Based on Gaussian Mixture Model
ZHANG Guo-Ping, GAO Zhao-Bin
(College of Computer and Communication Engineering, China University of Petroleum, Qingdao 266580, China)
For the traditional Gaussian mixture model, it is prone to detect the background as the foreground region and has poor effect in complex background, so this paper puts forward an improved algorithm combined with three frame difference method. First, we use the three frame difference method to improve adaptation of the revealed background region. Second, we use the means of background neighborhoods update to improve the resistance to complex background noise. The experiments prove that compared with the traditional method, the improved algorithm reduces large amount of noise and shortens learning cycle, and improves resistance to the weather and camera shake, optimizing the noise caused by background region revealed.
Gaussian mixture model; moving object detection; frame difference method; complex background; neighborhood update
2016-07-12;收到修改稿时间:2016-08-08
10.15888/j.cnki.csa.005693
