分拣机器人在电机定子铁心生产线上的应用
2017-05-15王卫军徐友法刘立冬李亚运
王卫军,徐友法,赵 鹏,刘立冬,李亚运,苏 陈
(中国电子科技集团公司第二十一研究所,上海200233)
0 引 言
工业机器人可以通过编程和调试,在工业生产中完成诸如焊接[1-2]、分拣、搬运[3]、装配[4-5]等各种操作,在汽车生产、物流运输等众多自动化领域中得到了广泛的应用。但是,在众多领域的应用中,工业机器人都是基于精确示教法来完成预定目标的,即事先设置好预定的位置点,然后让机器人严格按照预设的位置点进行运动。因此,如果当客观的物体在位置上面出现偏差时,基于示教法的机器人就无法完成相应的工作,柔性较差。
人类获取的外界客观知识中,有超过80%来自于人眼的视觉功能。因此,在工业生产中加入机器视觉后可以获得更多的外界客观信息,提高生产中应对复杂外界的能力。本文将机器视觉引入到SCARA工业机器人系统中,形成了一种和人的手眼类似的工业系统,可以很好地提高机器人在工业生产中的智能化水平,并在分拣、搬运等工作中得到广泛的应用[6-8]。
工件在进行大批量生产时,大量工件在内部工序间进行传输一般都是靠人工分拣和搬运。此时,如果工件的类型较多,并且搬运距离较远,工件的传输则会占用大量人工。以机器人视觉分拣系统作为其核心的自动化输送带则可以完全对工件实现自动的识别、分拣和搬运,并进行位姿调整。本文以电机定子铁心的搬运和位姿调整为例,设计了一条满足技术要求的自动化输送线。生产线以SCARA机器人作为抓手,以智能相机作为视觉处理模块获取工件的位置信息,实现了整个系统的自动化运作。
1 工业机器人
作为一种典型的机电一体化产品,工业机器人能够通过预先设定的程序,自动执行工作,可以通过机器人自身的动力和控制系统来实现预定功能。在工业机器人工作过程中,工作人员可以对其进行控制指挥,也可由技术人员事先编程,使机器人自动完成工作。
作为一种典型的平面结构类型关节机器人,SCARA能够分别沿X,Y,Z 3个方向进行旋转运动和Z轴方向上进行直线运动,其结构如图1所示。从SCARA机器人结构图中可以看出,其主题结构主要由4部分组成,分别包括基座、大臂、小臂、升降杆和末端执行器。
SCARA机器人目前主要采用伺服系统作为机器人关节的驱动方式,这是因为伺服电机往往具有更高的精度、稳定的低频特性以及较强的过载能力。本文所用的SCARA机器人也采用伺服电机和伺服驱动器作为电器伺服驱动系统。

图1 自主研发的核心零部件的SCARA机器人
2 工业视觉模块
工业视觉是指利用工业相机和计算机系统来完成人的眼睛所要完成的视觉功能。机器视觉系统主要包括三部分:基于相机的图像获取、基于计算机的图像的处理和分析、输出或显示。
图像的获取是指利用工业相机、智能相机等将被测物体拍照后所得的数字化图像和一些显著特征转换成为能够可以被计算机进行处理的一系列数组数据。图像的获取过程主要由照明打光、图像聚焦并形成、数字输出信号3部分组成。
通过图像视觉处理,系统就可以获得图像需要的各种信息,包括:位置信息、边缘状态等,通过与之相连接的外部设备,然后以各种形式输出检测结果及响应,其中外部输出设备可以是网络打印机、显示器、报警器以及其他控制信号。
在本文中,基于机器视觉的分拣机器人系统流程图如图2所示。

图2 视觉系统流程图
从流程图中可以看出,当目标物体通过传送带运送时,物体触发相机进行拍照,相机通过预设程序对图像进行处理,并快速有效地对其空间位姿进行定位,配合机械手进行抓取和操作的功能,从而大大地提高了自动化生产的效率。
如图3所示,本文所采用的相机为某公司研制的CMOS智能工业相机,130万像素,具备 DIO,RS232,GigE 3种通讯方式,并且采用图形化语言编程,可方便研发人员迅速完成对视觉项目的开发。

图3 某型号工业相机
3 测试生产线的搭建
结合电机定子铁心在实际生产过程情况,本文设计了能够对工件进行分拣、搬运以及位姿调整的简易闭环流水线,用以模拟实际的工况。该生产线包含以下4个模块:流水线模块,抓取机械手模块,视觉系统模块,SCARA机器人模块,其结构如图4所示。

图4 简易闭环流水线的系统结构
为形成一个闭环的测试生产线系统,整个生产线系统由两台SCARA机器人工作站和流水线等模块组成。
第一个工作站使用光电检测技术,利用机械限位系统,实现被搬运物体的限位。工件在1号传送带的带动下运动到光电开关固定位置,光电开关检测到有障碍物经过,输出IO信号发送给机器人运动控制器,工件最后停留在挡板固定位置不动,运动控制器根据示教指令,驱动SCARA机械手运动到工件当前位置点,同时使能气动组件,使机械抓手抓住电机定子铁心,搬运到2号传送带上,完成工件运动闭环。
第二个工作站使用视觉定位技术。工件在2号传送带的带动下运动到工业相机固定位置附近,触发光电开发,之后工业相机对工件进行照片采集,并将获取的工件图片信息传送给视觉处理模块,视觉处理模块根据发送来的图片信息进行数据提取以及分析,通过内部算法,得到工件的中心点位置坐标(X,Y),并将工件中心点位置坐标信息发送给机器人运动控制器,运动控制器根据示教指令以及工件中心位置点坐标信息,驱动SCARA机械手运动到工件当前位置点,同时使能气动组件,使机械抓手抓住电机定子铁心,搬运到1号传送带上。如此反复。具体的流程如图5所示。

图5 流水线工作流程图
4 实验
根据电机定子铁心流水线的设计,完成了各零部件的设计和选购,搭建了相应的模拟流水线的平台,其结果如图6所示。

图6 模拟流水线系统搭建
电机定子铁心使用量大,并且目前主要靠人工搬运,耗费了大量的人力物力。本文以电机定子铁心的分拣、搬运与位姿调整作为实验的对象,某伺服电机定子铁心的结构如图7所示。
为了突出工件的轮廓,本文利用某公司生产的环形光源,对定子铁心完成打光,通过工业相机拍摄出的图像如图8所示。

图7 某伺服电机定子铁心
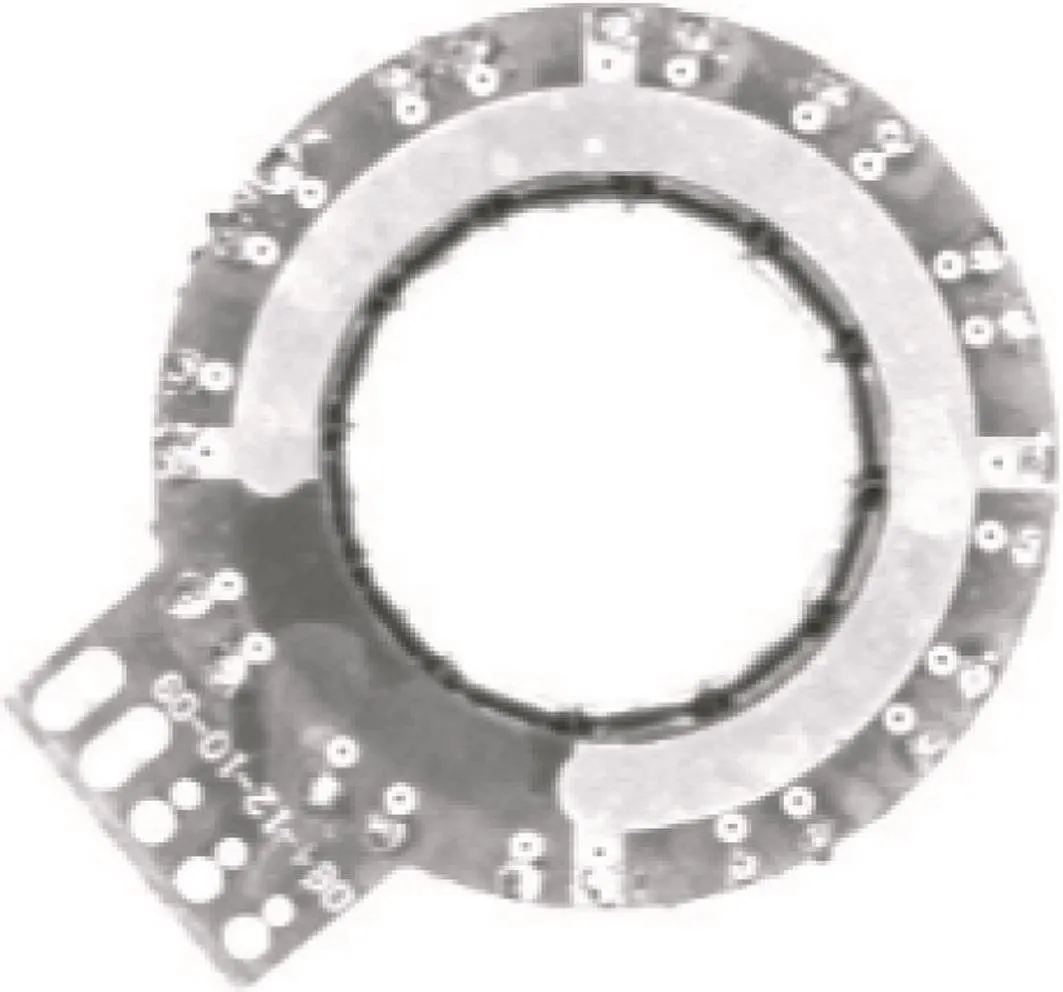
图8 电机定子铁心的图像
实验的主要任务是通过工业相机对电机定子铁心进行识别,之后对其中心进行定位,确定工件进行抓取的(X,Y)坐标,再将坐标传递给机器人来对铁心进行抓取。同时,由于定子铁心放到传送带上时是随机的,位姿不确定。因此,可以对工件的位姿进行判定,通过测定突出部分与传送带方向的夹角并传送给机器人,使机器人在搬运工程中对定子铁心的位姿进行矫正,使所有工件的突出部分与传送带平行,以方便实际生产线中的装箱。相机的定位程序的基本过程如图9所示。

图9 定位程序流程图
实验结果显示,本文搭建的电机定子铁心流水线中,工业相机可以准确地对电机定子铁心进行识别,并获得铁心的位置坐标(X,Y)和偏转角度。机器人能够很好地对铁心进行抓取,并能够对铁心的偏转角度进行矫正。整个分拣和搬运过程都取得了理想的实验结果。
实验结果显示,对于传送带上杂乱无章分布并传送过来的电机定子铁心。机器人系统可以快速地对工件进行识别,并进行相关的抓取和位姿调整,进行模拟装箱。单个电机定子铁心从识别到装箱的周期是5 s左右,可以完全替代原有的人工识别和手动装箱。即可以完全替代一个工人。实验达到了预期的效果,可以设想,若应用到生产线上,将大大提升生产线的生产效率。
5 结 语
本文根据实际工况和约束条件完成了某电机定子铁心分拣生产线的搭建,完成了各零部件的设计和选购。在搭建的生产线上,对SCARA机器人进行了分拣和抓取的动作规划,完成了机器人对工件的分拣和搬运的工作。同时,完成了相机定位程序的编写,实现了工业相机与机器人交互控制的集成。实验结果表明,本文搭建的基于机器视觉的分拣机器人系统可以在电机定子铁心生产线上很好地应用,并有较高的可靠性和较高的生产效率,可以完全替代人工。智能化自动生产线系统的搭建确立,将为相关的伺服电机企业在生产线的改装换代上提供很好的范例。
