基于单神经元PI的转台伺服控制系统设计与应用
2017-05-13史晓勇
陈 年, 李 唐, 史晓勇, 沈 彤
(中船重工海博威江苏科技发展有限公司,江苏 扬州 225000)
基于单神经元PI的转台伺服控制系统设计与应用
陈 年, 李 唐, 史晓勇, 沈 彤
(中船重工海博威江苏科技发展有限公司,江苏 扬州 225000)
为了提高伺服控制系统的精度,在综合考虑传统算法优缺点的基础上,设计并实现了一种基于单神经元PI的伺服转台控制系统。该系统采用SICK绝对式多圈编码器作为转台转动位置的检测工具,并把转台的位置输入到系统中形成闭环控制;其中位置环采用了单神经元PI算法取代传统的PI算法,并采用可编程逻辑控制器(FPGA)实现了上述算法;搭建了伺服控制系统的试验平台。试验结果表明,该转台的置位精度及转速的平稳性得到了有效提高。
伺服系统; 单神经元PI; 定位精度
0 引 言
该测试转台用来承载天线测试设备,通过转台的转动引导天线搜索和指向外界的目标,因此对转台的置位精度、运动的可靠性和运动的平稳性等提出了较高的要求。转台置位精度的主要影响因素包括机械传动误差和控制误差,而机械传动误差一直是制造业研究的难点,所以进一步提高控制精度具有一定的研究价值[1-2]。
目前,工程师广泛应用的传统PID控制方法,可以在一定程度上改善系统的控制精度。但伺服系统是一个典型的非线性系统,容易受外部环境影响,模型参数也不固定,此时传统PI控制器由于参数难以整定,系统动态、静态性能便会受到影响。此时,国内外学者提出了多种控制算法[3]。文献[4]采用模糊控制算法,但是模糊规则的建立需要积累较多的经验且工程应用比较困难。文献[5-6]采用RBF神经网络算法,实现了非线性系统的输入输出线性化,其控制效果优于传统的PI控制,但其运算复杂,工程实现较困难。文献[7]采用零相差前馈控制器,但却没有指定该方法的应用范围。单神经元作为构成神经网络的基本单元,具有自学习和自适应的能力,将单神经元模型与传统的PI控制器相结合,可以在转台系统工作过程中不断地调节PI参数[8],从而增强系统的稳定性。
本文将这种方法应用于转台控制系统中,仿真及试验结果表明,单神经元PI控制策略比传统的PI控制策略置位精度更高,系统的平稳度更加平滑,鲁棒性更强。
1 单神经元PI控制器设计
转台的置位指令与编码器的数据差值作为单神经元PI控制器的输入,单神经元的输出传输到转台系统中。控制器结构框图如图1所示。

图1 单神经元PI控制器结构框图
图1中,y(k)为被控对象的实际输出值,r(k)为给定值,w1(k)、w2(k)、w3(k)分别为单神经元的突触权值,k(k>0)为神经元控制器的增益,u(k)为单神经元控制器的控制量,x1(k)、x2(k)、x3(k)分别为单神经元的三个输入量,其表达式为
(1)
式中:x1(k)——反映了系统误差(相当于积分项);
x2(k)——反映了系统误差的一阶差分(相当于比例项);
x3(k)——反映了系统误差的二阶差分(相当于微分项)。
单神经元的输出表达式为
(2)
单神经元可以通过一定的学习规则调节加权系数。本文单神经元PI控制器采用有监督的Hebb学习规则。该算法中,权值系数wi(k)与神经元的输入、输出和误差信号相关。K为神经元的增益(比例系数),K值的选择非常重要,K值过大或者过小都会对转台系统的快速跟踪和抗干扰能力有较大的影响。对于不同的权值,学习速率采用不同的值,以便根据需要对各自的权值进行调整。
本文设计基于单神经元PI控制器的Simulink仿真模型,如图2所示。在S函数中编写单神经元PI控制算法,将位置输入误差在k时刻误差值e(k)以及k-1时刻的误差值e(k-1)作为输入量,PI单神经元控制器在输出之前增加了一个饱和器,防止参数输出过大或者过小。
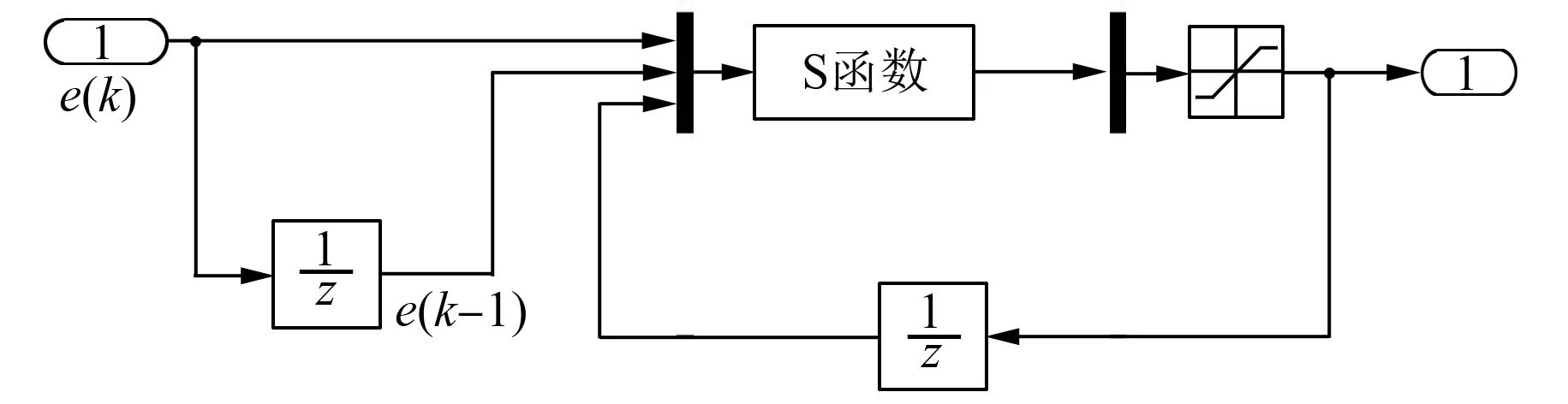
图2 单神经元PI结构图
2 控制系统软硬件设计
转台伺服控制系统的硬件主要由PC机、触摸屏、控制器、驱动器和电机等组成[9-11]。伺服系统根据遥控(PC机)或者本控(触摸屏)接受置位角度命令;该命令通过RS-422串口发送到伺服控制器,伺服控制器采用SOPC技术在一块Cyclone Ⅱ FPGA中实现一个32位的可配置软核——NIOS Ⅱ核,FPGA负责接收编码器的反馈角度并完成对引导命令的PI运算。运算结果通过CANOPEN总线发送到驱动器,并在驱动器中完成速度环与电流环的运算,最后驱动器产生正弦脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)信号驱动电机运动。系统框图如图3所示。

图3 伺服系统控制框图
转台伺服控制系统的软件工作流程如图4所示。
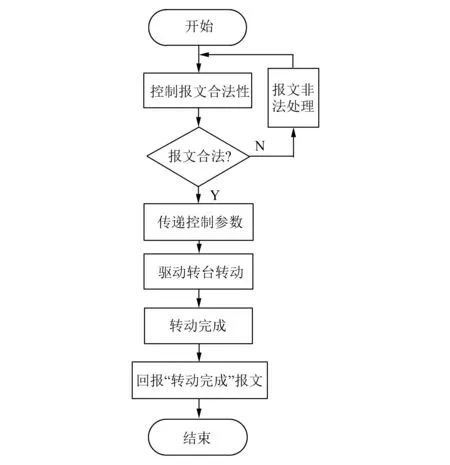
图4 伺服系统软件工作流程图
2. 1 仿真及分析
MATLAB仿真中,永磁同步电机参数如下:定子电阻Rs=1.3 Ω;电感L=5.25 mH;定子磁链Ψs=0.215 Wb;极对数p=4;额定功率=1.5 kW;单神经元初始化学习速率xiteP为0.4、xiteI为0.35、初始化Wkp为0.1、Wki为0.1。其仿真对比结果如图5、图6所示。
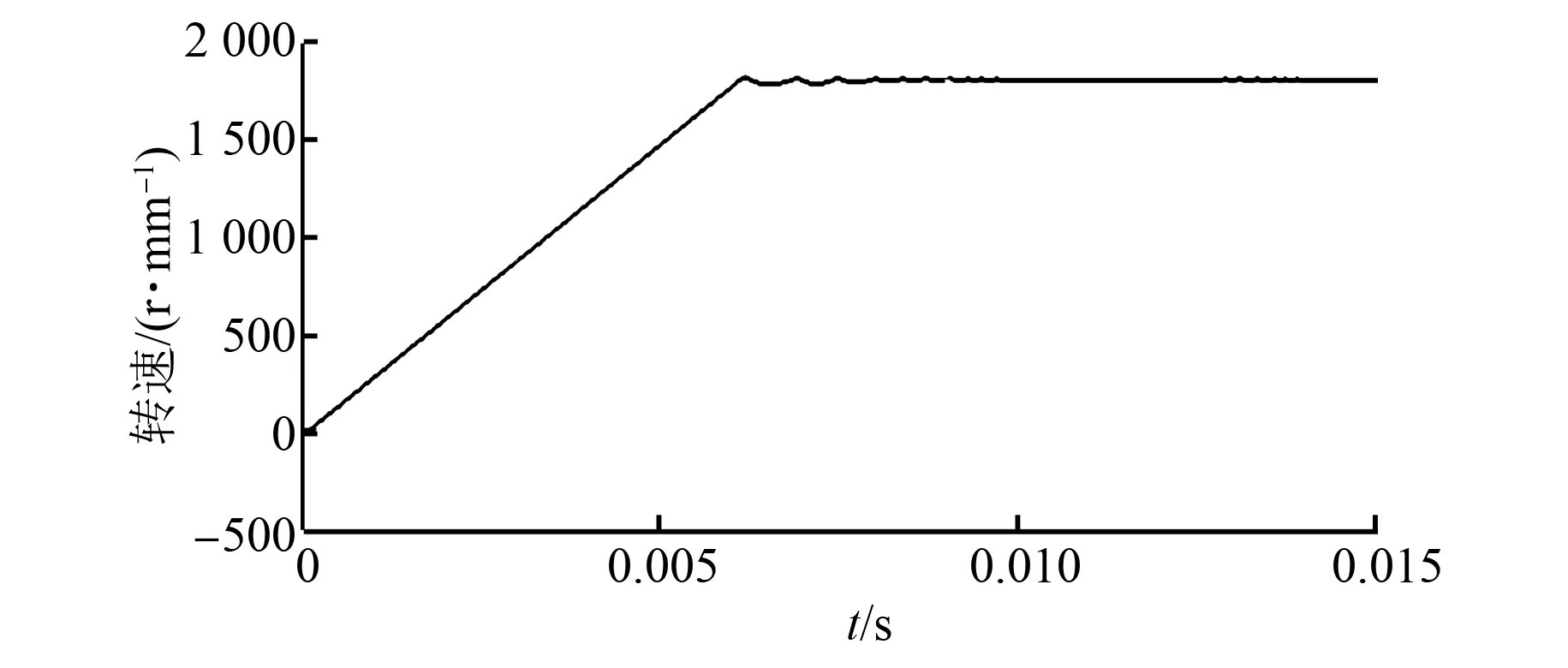
图5 传统PI速度响应曲线

图6 单神经元PI速度响应曲线
仿真表明,利用单神经元控制既解决了PI控制初始参数不易选择的难题,同时由波形可见单神经元PI控制策略电机转速跟踪时间短、无超调,转速波动范围很小、效果很好,满足高性能伺服控制系统的要求。
2. 2 试验及分析
本试验平台选用施耐德LXM32A驱动器、BSH0552永磁同步电机、FPGA控制器、威纶通TP8070触摸屏,动力齿轮传动比130…23,减速器减速比30…1,编码器选用德国SICK绝对值多圈编码器AFM60B-S4AK065536,其分辨率为0.005 49°,数据齿轮减速比160…20。试验条件根据项目要求制定:在速率范围为1~10 °/s时测量转台的置位精度、转速平稳度及测量重复性。
图7为伺服系统试验平台。图8为转台工作在置位模式的显示界面,定位角度是上位机下发的置位角度,实际角度是编码器测量的转台角度值,差值是转台的定位误差。表1和表2记录了转台间隔60°的置位误差,并计算出误差的均方根;表3和表4记录了转台在不同设定速度(由于存在减速比,所以折算为电机的转速)时,驱动器显示的电机转速变化范围。从表1和表2可以得出,单神经元PI比传统PI伺服控制系统置位精度更高;从表3和表4可以得出单神经元PI比传统PI伺服控制系统转速更加平稳。

图7 伺服系统试验平台

图8 触摸屏显示界面
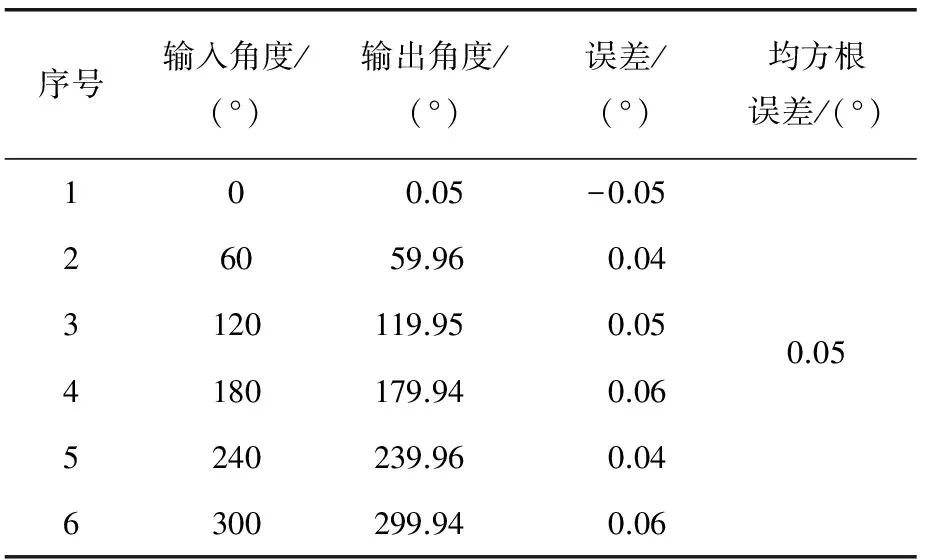
序号输入角度/(°)输出角度/(°)误差/(°)均方根误差/(°)100.05-0.0526059.960.043120119.950.050.054180179.940.065240239.960.046300299.940.06

表2 单神经元PI置位误差

表3 传统PI速度平稳度
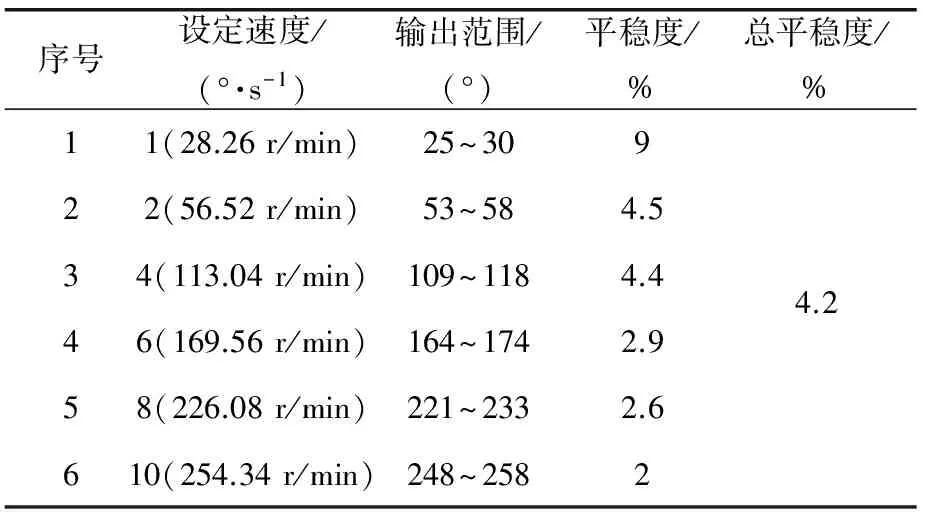
表4 单神经元PI速度平稳度
3 结 语
本文设计了一种基于单神经元PI的伺服转台控制系统。通过仿真及试验,结果表明单神经元PI方案相比于传统的PI方案具有较高的精度,且具有工程应用价值。
[1] 田大鹏,吴云洁,刘晓东,等.高精度电机伺服系统控制综合方法[J].电机与控制学报,2010,14(7): 66-74.
[2] TESFAYE A, LEE H S, TOMIZUKA M. A sensitivity optimization app-roach to design of a disturbance observer in digital motion control systems[J]. IEEE Transactions on Mechatronics, 2000, 5(1): 32-38.
[3] 刘强.高性能机械伺服系统运动控制技术综述[J].电机与控制学报,2008,12(5): 603-609.
[4] 吕东阳,王显军.基于模糊PID控制的电机转台伺服系统[J].计算机应用,2014,34(S1): 166-168,185.
[5] YA Q, WANG W H. RBF based discrete terminal sliding control for flight simulator[C]∥ Proc of IEEE International Conference on Mechatronics and Automation, Piscataway: IEEE Press, 2011: 337-342.
[6] 白国振,俞洁皓.基于神经网络补偿的转台伺服系统控制研究[J].计算机应用研究,2016,33(6): 1676-1681.
[7] KOIDE D, TAKANO Y, TOKUMARU H, et al. High-speed tracking servo of modified ZPET-feedforward control for optical disk drives[C]∥IEEE Industrial Electronics Conference Proceedings, November 3-5, 2009, Porto, Portugal, 2009: 3106-3111.
[8] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
[9] 张占立,康春花,郭士军,等.基于单片机的步进电机控制系统[J].电机与控制应用,2011,38(3): 28-31.
[10] 王明渝,张忠强.模糊直接转矩控制的永磁同步电机在测功机中的应用[J].电机与控制应用,2008,35(3): 56-61.
[11] 刘明,宋弘.自适应模糊PID智能控制器在无刷直流电机速度控制系统中的应用[J].电机与控制应用,2012,39(11): 22-25.
Design and Application of Servo Control System Based on Single Neuron PI
CHENNian,LITang,SHIXiaoyong,SHENTong
(CSIC Hebowi Jiangsu Technology Development Co., Ltd., Yangzhou 225000, China)
In order to improve the accuracy of the servo control system, based on the comprehensive consideration of the advantages and disadvantages of the traditional algorithm, a servo turntable control system based on single neuron PI was designed and accomplished. The system used SICK absolute multi loop encoder as the turntable displacement detection tool to form a closed-loop control system, in which the position loop used a single neuron PI algorithm to replace the traditional PI algorithm. Using FPGA programmable logic controller to realize the above algorithm; experimental platform servo control system. The experimental results showed that the precision of the rotating platform and the stability of the rotating speed could improve effectively.
servo system; single neuron PI; positioning accuracy
陈 年(1987—),男,硕士研究生,研究方向为电机控制技术。
TM 301.2
A
1673-6540(2017)04- 0060- 04
2016 -06 -30
