基于FP1—C24和力控组态软件的电梯控制系统设计
2017-05-13汪金萍
【摘要】五层电梯控制系统由上位机和下位机组成,上位机由PC机及三维力控组态软件(Force Control V7.0)组成,主要包括工程创建、窗口创建、变量定义、I/O设备定义、动画链接、脚本程序编写及系统配置等;下位机由松下FP1-C24的PLC硬件及梯形图软件组成,主要包括I/O端口分配,外部接线,程序梯形图等。开发了五层电梯控制梯形图程序并调试仿真运行正确,设计结果能在开发界面上直观的反映电梯的运行状态,该系统具有的优点是:系统简单,运行稳定,方便调试。
【关键词】力控组态软件;五层电梯;梯形图;PLC
本设计中,可编程序控制器(PLC)及组态软件以其通用灵活的控制性能,适应环境的可靠性与简单方便的使用性能完全能适合电梯控制系统的设计要求。基于FP1-C24和力控组态软件的电梯控制系统设计,主要是对电梯控制系统的模拟运行,以及绘制人机界面的友好显示图,从而为实现电梯的高效快速运行奠定基础,满足广大顾客的需求。当绘制仿真图形界面,3D版组态软件是用来模拟在工程窗口的电梯房图和操作按钮,使动画连接。并设计数据库,建立数据点,并给上位机和下位机设置通信方式,最后实现模拟电梯控制系统被该控制系统实时监控。
一、电梯模型控制系统总体方案设计
本五层电梯控制系统由PC机、松下FP1-C24的PLC及三维力控软件Force Control V7.0组成,在三维力控软件工程界面绘制模拟的五层电梯实物图,在数据库中建立46个数字点、并对每个点添加动画连接,在FPWIN GR里编写梯形图控制程序,下载到PLC里,选用松下电工FP系列PLC作为硬件设备,使PLC和PC机能相互通信,使组态监控系统与PLC控制系统进行实时数据交换,最终可实现PLC和PC机的通信连接,从而完成对控制程序梯形图的调试和仿真运行。设计者和使用者都可在开发界面上直观、确切地观看电梯的运行状况,以及进行一些相关的调试监控操作。最终结果可以看到,本五层电梯具有四大优点:运行界面直观反映电梯状态、运行安全放心、抗电磁干扰能力强,自动化程度高。
为使系统能够在最佳性能状态运行。经过分析,确定如图一所示的设计过程。
二、模拟电梯界面设计
1、电梯控制组态仿真界面
力控组态软件设计的电梯监控系统的主要过程有:首先,在三维软件里新建项目为项目命名(new APP1);在组态窗口中新配置逻辑设备,然后选择松下PLC,FP1串口,PPI通信协议、设备地址1和通讯口COM1;命名新I/O设备名称(5层电梯)并优化设备信息。其次,在力控组态软件的主窗口中,绘制电梯实物图,把界面上各个按钮设置上各自的对象属性,按需求制作动画连接,使设置按钮按各自的功能情况变化,检验和测试PLC电梯控制系统在组态开发界面的运转状况。最后,组态软件的数据变量和PLC的数据地址链接,可实现PLC与组态软件的通信,PLC和组态软件的串口设置相同的通讯参数,使PLC和PC实现互相通信。显示画面如图二所示。
2、PLC程序中I/O端口分配
首先,依据27点输入和19点输出,构思I/O地址分配,使PLC内部继电器的输入和输出和每个输入和输出信息一一对应。电梯的控制系统要求,电梯内部有5层的选择命令按钮,电梯平层行程开关,开门按钮和关门按钮,大厅呼叫按钮,电梯上行和下行指示灯等,共需开关量输入口27个。控制电梯的上下,上下指示灯,轿厢外的开门关门控制,显示1至5楼位置指示数字,电梯轿厢外部各层指令信号,共需开关量输出口19路。在Draw导航器中选择“I/O设备驱动/PLC/松下电工/FP系列串口”对话框。
设备的名称,第一步:起名为“5层电梯”,设备地址为“1”,数据更新周期为“1000”,通信方式为RS232,第二步:串口设置为COM1,通信参数配置:波特率和PLC设备的波特率必须保持一致,我选择的松下FP1-C24的PLC只有两种类型的波特率,为19200或9600,若波特率选择不一致,则无法正常通信,本设计选用波特率19200,奇偶校验,奇校验,数据位8位。
3、动画连接
经制作动画连接赋予显示画面“血液”使其动起来,开发系统、界面运行系统和数据库系统都是力控的基本组成部分,开发系统系统主要完成五层电梯的模拟,界面运行系统主要完成仿真运行,数据库系统主要完成过程实时数据的采集、处理、历史数据处理等。对一个图形对象制作动画连接,使其“活动”起来,动画连接使对象随变量的值的改变而改变。我们要让电梯门在水平方向上变化,选用链接“动画连接/尺寸旋转移动”。设置值变化和移动像素变化。如法炮制,我们定义电梯其他按钮的动作。
三、PLC控制系统设计
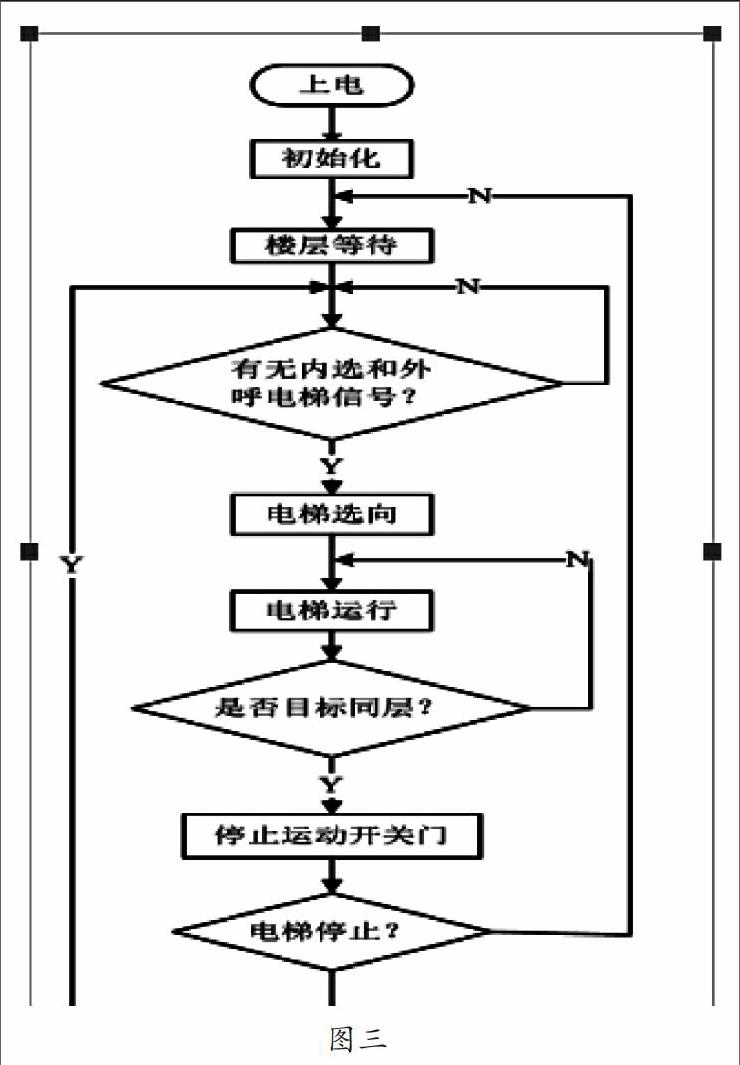
1、软件编程流程图
基于对本设计软件的分析与控制需求,确定总体系统软件结构流程,如图三。
2、现场动作脚本的编程与调试
为了使工程界面的图形控件的动画效果更加逼真的呈现在开发界面,我们需要对某些细节采用对变量进行动作脚本编程的操作,在导航栏工程项目下點击功能/动作/应用程序动作,双击进入脚本编辑器。如:电梯门打开,正确设置门控与水平移动变量像素值,选择运行时周期执行,就可实现各楼层开门和关门的动画效果,并且水平移动多少,由门所处工程界面的位置及对应门相对距离决定。电梯上下行速度随上下层电梯位置之间的距离而变,本次脚本编程编写的脚本程序经过反复调试、运行、最终达到与现场同步。
四、PLC与力控组态软件联合仿真
1、进入系统仿真运行
PLC状态开关置为运行,梯形图程序下载到PLC,启动力控组态运行系统,进入开发界面,检验电梯控制系统仿真运行状态,观察电梯仿真界面的运行是不是符合逻辑控制关系,最终满足设计者的最佳想法,实现电梯的智能化功能,完成组态软件对PLC的控制及PLC对组态软件仿真模型的控制功能。
2、仿真结果
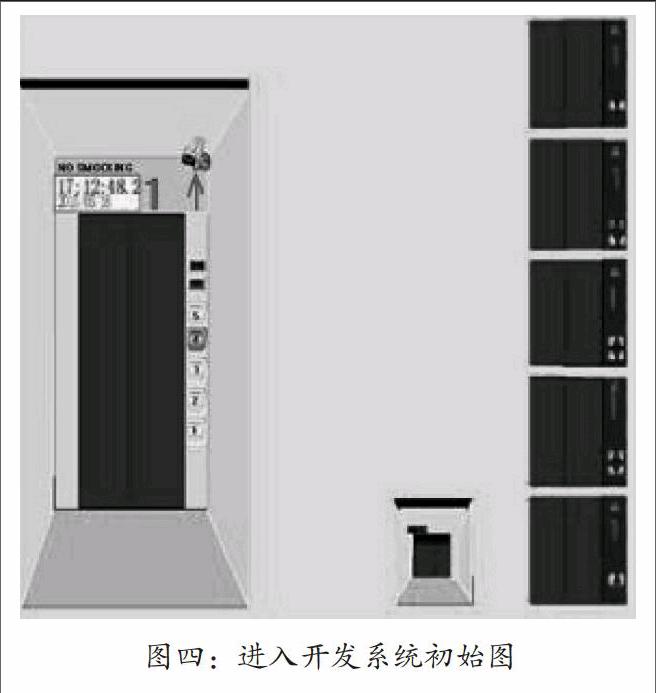
进入开发系统,开始运行。由于对电梯初始化的设计,包括电梯停止时处于关门状态,所有显示值为“1”及不响应任何楼层的呼叫。如图四。
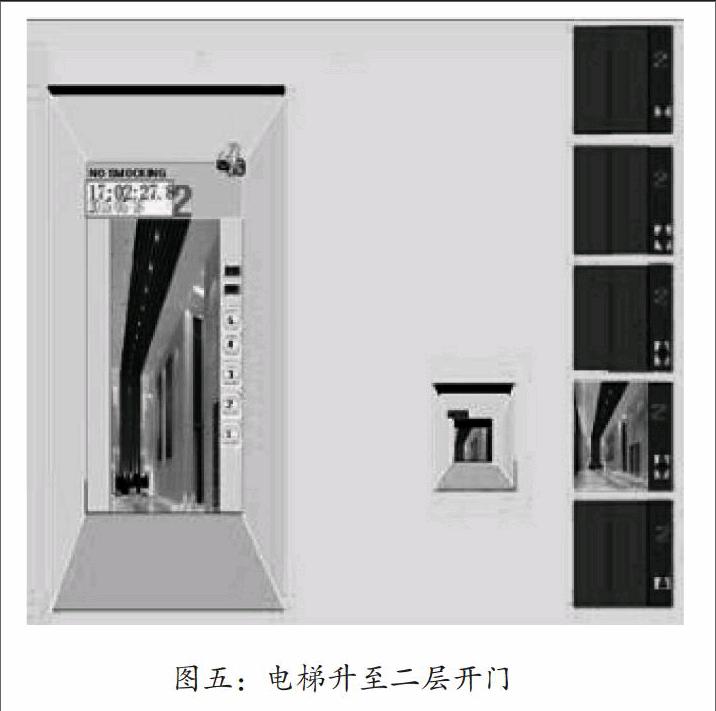
电梯处于二层开门。如图五。
五、结论
基于FP1-C24和力控组态软件的电梯控制系统的设计简单易懂,性能稳定,采用FPWIN GR软件编写梯形图,编程易学易懂,功能强大。然后,把梯形图下载到PLC里,并设置通信参数和力控组态软件参数保持一致。最后,界面设计在三维力控组态软件开发界面描述,此开发界面灵活、方便,通过添加数据库点,对每一个按钮制作动画连接,选择松下I/O设备,最后实现PLC和PC机双向通信。在组态软件运行界面可以实时监控界面,操作方便,可视性强,直观的展示电梯运行状态。因此,在实践中,可以进行设计,近似真实的模拟调试,PLC控制电梯具有很强特点:高性能、电路简单、成本低。经调试,通过PLC控制电梯,实现电梯的基本功能,并能达到稳、准、快的要求,该设计已基本完成任务的要求,达到了预期目标,在今后的生活和生产实践中具有良好的应用前景。
【参考文献】
[1] 周美兰, 周 封, 王岳宇. PLC电气控制与组态设计(第二版)[M]. 科学出版社, 2004.
[2] 刘 伟. 基于西门子S7-300PLC的虚拟电梯设计[D]. 青岛: 中国海洋大学, 2009.
[3] 殷洪义. 可编程序控制器选择设计与维护[M]. 北京: 机械工业出版社, 2004.
[4] 李秧耕, 何乔治, 何峰峰. 电梯基本原理及安装维修全书[M]. 北京机械工业出版社, 2003.
[5] 郑学伟. 基于PLC的电梯控制系统[D]. 天津: 天津大学, 2006.
【作者简介】
汪金萍(1991—),女,汉族,甘肃会宁人,西安科技大学通信学院2016级通信与信息系统专业硕士研究生。
