测速齿轮相对面积对电涡流传感器输出电压的影响∗
2017-05-12张绿野朱晓东邢海波傅行军
张绿野 朱晓东 邢海波 傅行军 郭 瑞
(东南大学能源与环境学院火电机组振动国家工程中心)
测速齿轮相对面积对电涡流传感器输出电压的影响∗
张绿野 朱晓东 邢海波 傅行军 郭 瑞
(东南大学能源与环境学院火电机组振动国家工程中心)
轴系的转速是旋转机械系统的基础参数,齿轮-ETC是其广泛应用的测量方法。齿轮表面的齿槽相间结构导致连续面积较少,而连续面积与ETC探头面积之比(相对面积)直接影响ETC的输出特性乃至转速提取,齿轮齿数是影响测速齿轮相对面积的重要因素之一。通过ETC在不同齿数齿轮情况下的动静态试验及输出特性模型研究,结果表明:ETC总输出电压信号包括静态偏置电压、动态电压及干扰电压;相对面积减小导致静态偏置电压及动态电压的幅值降低;相对面积过小会使干扰电压在总输出电压中所占份额增大,相对误差随之增大,对其直接调制所获取的转速结果相对误差也会增大。
电涡流传感器;相对面积;转速测量;齿轮
0 引言
旋转机械的轴系转速是反映其工作状态的基础参数,不仅可直接作为控制对象及状态监测的参考值,而且包含反映转子转动状态的综合信息,经深入挖掘提取后可用于轴系扭转振动特性分析、转动惯量现场识别等方面[1-2]。
随着转速测量技术的发展,目前常用转速测量工具为固定安装的电涡流传感器(ECT,Eddy Current Transducer)与对应的在转子上同轴安装的测速齿轮。由于其可靠性好、灵敏度高、响应速度快、抗干扰力强、不受油污等介质影响等优点,在发电机组的振动状态监测与故障诊断中得到广泛应用[3-4]。
测速齿轮圆周与ETC探头的相对面积会影响ETC输出特性,从而影响ETC输出原始信号,最终影响了转速测量结果[5-6]。在诸如送风机、引风机等轴径较细的辅机的转速测量中,这种影响更加突出。因此为了保证转速测量结果的准确性,研究测速齿轮相对面积与ETC输出信号的关系具有重要意义。
1 ETC转速测量基本原理
转速测量系统主要包括三个部分:1)数据采集系统,包括安装在轴上的齿轮、对应的电涡流传感器;2)数据调理系统,包括常规的A/D转换、滤波、整形等和特殊的处理算法;3)转速信号提取算法。系统结构示意图如图1所示。

图1 测速系统结构图Fig.1 Speed measuring system structure
ETC的基本原理如图2所示,其头部有感应线圈,通上高频电流I1后,在线圈周围产生高频电磁场H1。如果其周围有金属导体,便会在金属表面产生电涡流I2。电涡流产生的次生电磁场与感应线圈的电磁场H2相互叠加作用,改变了感应线圈的阻抗[7]。在其他参数不变的情况下,该阻抗是线圈与金属导体之间距离的单值函数。将感应线圈接入振荡回路,即可输出一个与距离有关的高频谐波。通过前置放大器,将信号放大、检波和滤波后,即可得到一个与距离成正比的输出电压[8]。
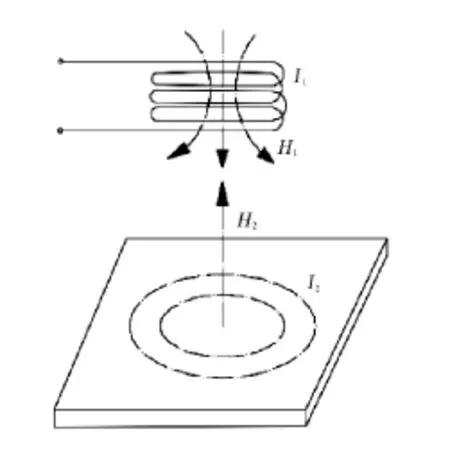
图2 ETC基本原理示意图Fig.2 Basic principle of ETC

其中,h为ETC探头与被测物体间的距离,mm;s为ETC灵敏度,V/mm。
齿轮随旋转机械轴系转动,根据齿轮圆周齿顶-齿槽相间的几何机构,理想情况下ETC会随之产生周期性的脉冲信号,脉冲信号中携带了轴的转速信息。通过调制电路对信号处理后,便可根据转速提取算法获得旋转机械转速的数据信息。
2 齿轮相对面积对ETC输出特性影响
2.1 齿轮相对面积对ETC静态输出电压影响
由ETC的工作原理可以看出,ETC得到与间距成正比的线性电压的条件为:1)有导电体存在于交变的磁场中;2)导电体表面较ETC探头表面有足够连续面积来形成次生电磁场。然而由于齿轮齿和槽的相间排列,在较细转轴的转速测量时,齿轮圆周上往往不能保证有足够连续面积形成次生电磁场[9]。
用ETC探头面积作为基准来度量齿轮圆周连续面积,即定义齿轮相对面积γ为齿轮圆周连续面积与ETC探头表面积之比。一般情况下齿和槽均匀分布,测速齿轮的轴向宽度B大于传感器的直径De,因此γ可以由式(2)表示,其中Lt为齿轮周向宽度。

为研究γ对ETC输出的影响,对三种齿轮进行静态间隙电压测量实验,齿轮齿数m分别为15,30,60,对应的γ分别为1,0.5,0.25,齿轮齿顶与齿跟的高度差ht为2.2mm。所用传感器的头部直径为8mm,前置电压为24V,位移灵敏度s为8V/mm。ETC静态标定结果如图3所示。
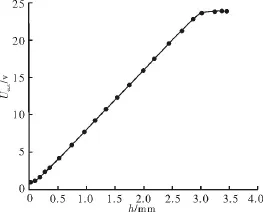
图3 静态标定Uout-h输出特性Fig.3 Output characteristics calibration aboutUout-h
实验测量示意图如图4所示,其中阴影部分为避免齿轮不圆度对测量结果造成影响而标定的测试齿。具体实验步骤为:
1)以测试齿的齿顶正对ETC轴线为基准位置,调整齿顶与ETC的距离为0.4mm。
2)测量基准位置时ETC的输出电压U0。
3)转动齿轮,将测试齿相邻的槽中心线正对ETC,测量ETC的输出电压U1。
4)转动齿轮,到下一测试齿,重复步骤(2)~(3)。
5)将4个测试齿的数据取平均值,作为该齿轮的最终结果。
6)更换齿轮,重复(2)~(5)。
定义U0与U1差值为ΔU,则压差ΔU对应的名义幅值Δh即为压差ΔU与位移灵敏度s的比值:

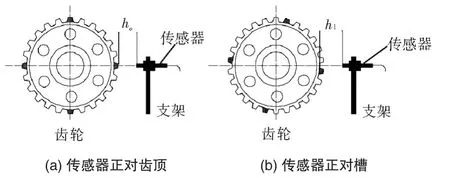
图4 齿顶与槽间隙电压测量Fig.4 Voltage measurements on gear top and bottom
由于ETC输出特性,测量电压数据为负值,为避免误解对电压数据取绝对值。采集整理数据如表1所示。其中m=0处的数据为静态标定时0.4mm和2.6mm的间隙电压,用以比较齿轮无量纲面积γ对测量结果的影响。
从表1可以看出在齿轮与传感器探头距离保持不变的情况下,测速齿轮齿数改变会使ECT测得的间隙电压发生改变,与静态标定所测间隙电压数据有所偏差,具体表现在:
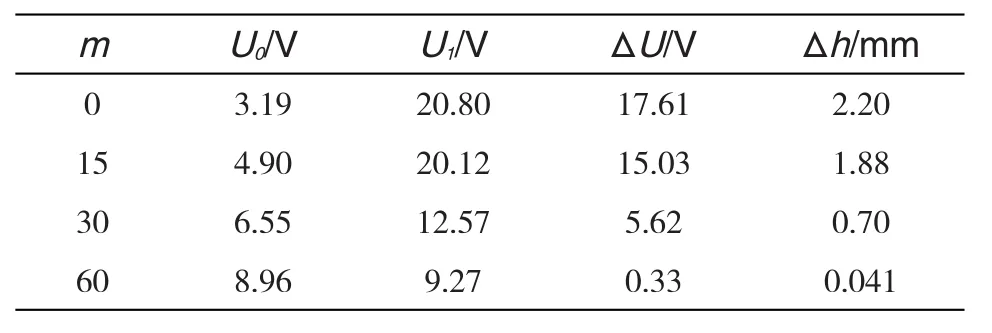
表1 不同齿数间隙电压测量表Tab.1 Gap voltage measurement about different gears
1)U0随着m的增加而增大,与静态标定的测量值偏差越来越大。这是由于齿数的增加使得正对ECT探头的面积减少(即γ随之减小),在金属表面产生的电涡流减弱,导致电涡流生成的电磁场对ECT感应线圈电磁场的叠加作用减弱,因此反映出U0的增加。
2)U1随着m的增加而减小,与静态标定的测量值偏差也越来越大。造成这种现象的原因与U0增大的原因刚好相反,m的增加使齿槽正对ETC探头时,齿顶引起的次生磁场对ECT感应线圈电磁场的叠加作用增强,因此反映出U0的减小。
3)由于U0增大及U1减小,使得静态测量实际得到的ΔU随着m的增加而越来越偏离实际值,造成实际位移幅值测量的误差。且在动态信号输出时,若Δh下降至与干扰信号造成的振动位移影响处于同一数量级,将会对转速测量结果造成极大地误差[10]。
2.2 齿轮-ETC系统动态输出特性
对于齿和槽均匀分布的测速齿轮,每个齿经过ETC轴线引起的输出特性变化是一致的,具有周期性。根据齿轮-ETC系统动态输出特性,可以将齿高引起的周期性动态输出分为四个阶段:
1)设在初始时刻第i齿中心线正对ECT轴线(称为零初相位置),其影响最大,因距离ECT最近,因此该时刻ECT输出电压绝对值最小。
2)当齿顶中心线逐渐转过ECT后,其影响逐渐减小,槽的影响逐渐增大,输出电压绝对值逐渐增大。
3)当槽中心与ECT轴线重合时,其影响最大,因距离ECT最远,因此输出电压绝对值最大。
4)随后槽的影响又逐步减小,齿的影响逐步增大,输出电压绝对值逐渐减小,直至到第i+1齿中心线到达ECT轴线后,输出电压绝对值又达到最小。
由此可见,在转子转动时,齿高引起的输出电压可用余弦函数表示:

其中φ为相位角,若齿顶正对ETC为初始时刻,则φ=0。
考虑到齿轮与ETC间距引起的间隙电压以及实际转速测量过程中振动与电磁干扰等影响因素的存在,最终实际测量过程中ETC的总输出电压可以表示为:

可以看出输出电压包括三个部分:齿轮与ETC静态距离引起的静态偏置电压U0;齿高引起的动态电压Uh;干扰信号引起的干扰电压Uξ。
在理想情况下,相邻齿间隙足够大,因此相邻齿的相互电磁影响可以忽略。此时U0=h0s,ΔU=hs。但是根据相对面积对ETC输出电压影响实验可以看出:
1)随着γ的减小U0不断增大,因此,此时U0不再是齿顶与ETC间距h0的单值函数,而与h0,h,γ三个变量有关。
2)随着γ的减小ΔU不断减小,同样,ΔU也不再是齿高h的单值函数,它与h及γ有关。
3 齿轮-ETC动态输出特性实验研究
在对轴的实际转速测量过程中,U0是一个常量,只需注意调整间距使其位于合适的范围,防止出现信号截止现象。而最终影响ETC动态输出特性的是Uh与Uξ的叠加作用。
通过齿轮-ETC静态输出特性实验,以及系统动态输出特性分析可以看出:当齿轮γ减小时,Uh幅值随ΔU下降而减小,Uξ对总输出电压的影响则相对增大,测速过程中干扰因素对ETC的动态输出信号的扰动影响增大。在ETC静态输出特性实验中,γ为0.25时测得的名义齿高位移急剧下降至0.041mm,这与振动检测所得振动位移处于同一量级。如果直接对此输出信号调解分析,得到的转速结果相对误差将会增大。
为研究齿轮γ对电涡流传感器动态输出信号的影响,对γ分别为1,0.5,0.25进行动态输出信号测量的实验。图5所示为转速为600r/min时,在各采样点ns的名义幅值Δh信号。

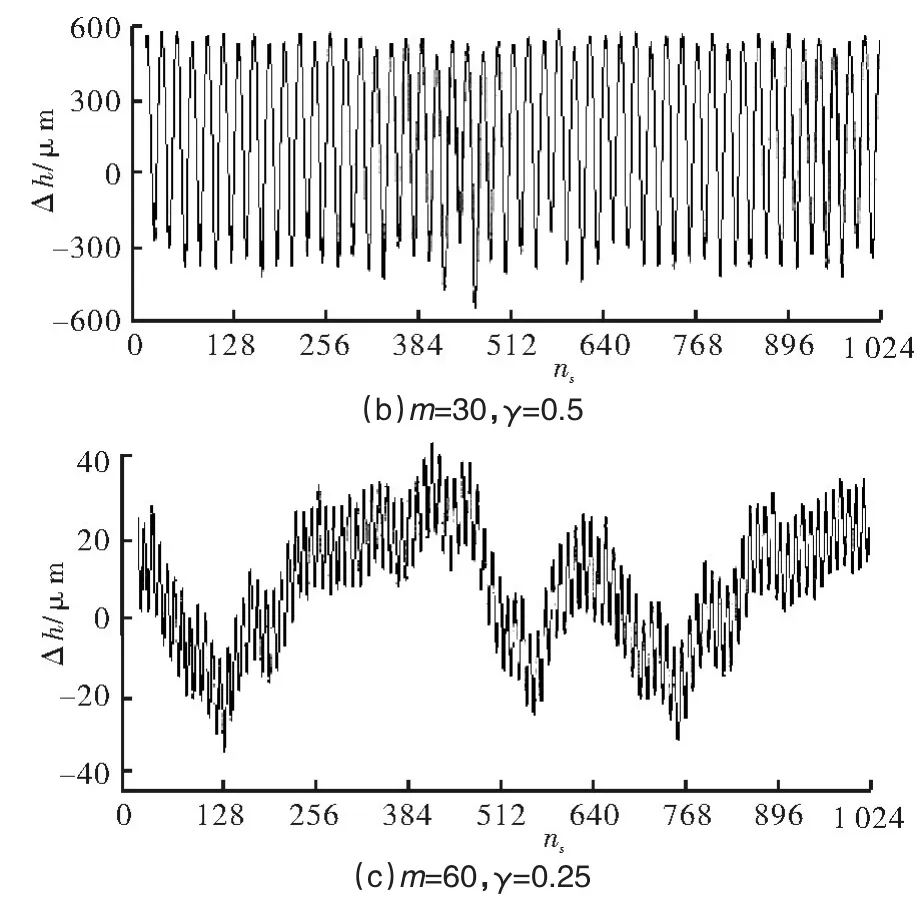
图5 不同齿数时ETC输出的时域信号Fig.5 Time domain output about ETC with different gears
对应的频谱如图6所示,其对应的工频为10Hz,对应于齿轮γ为1,0.5,0.25的脉冲频率应为150Hz,300 Hz,600Hz。
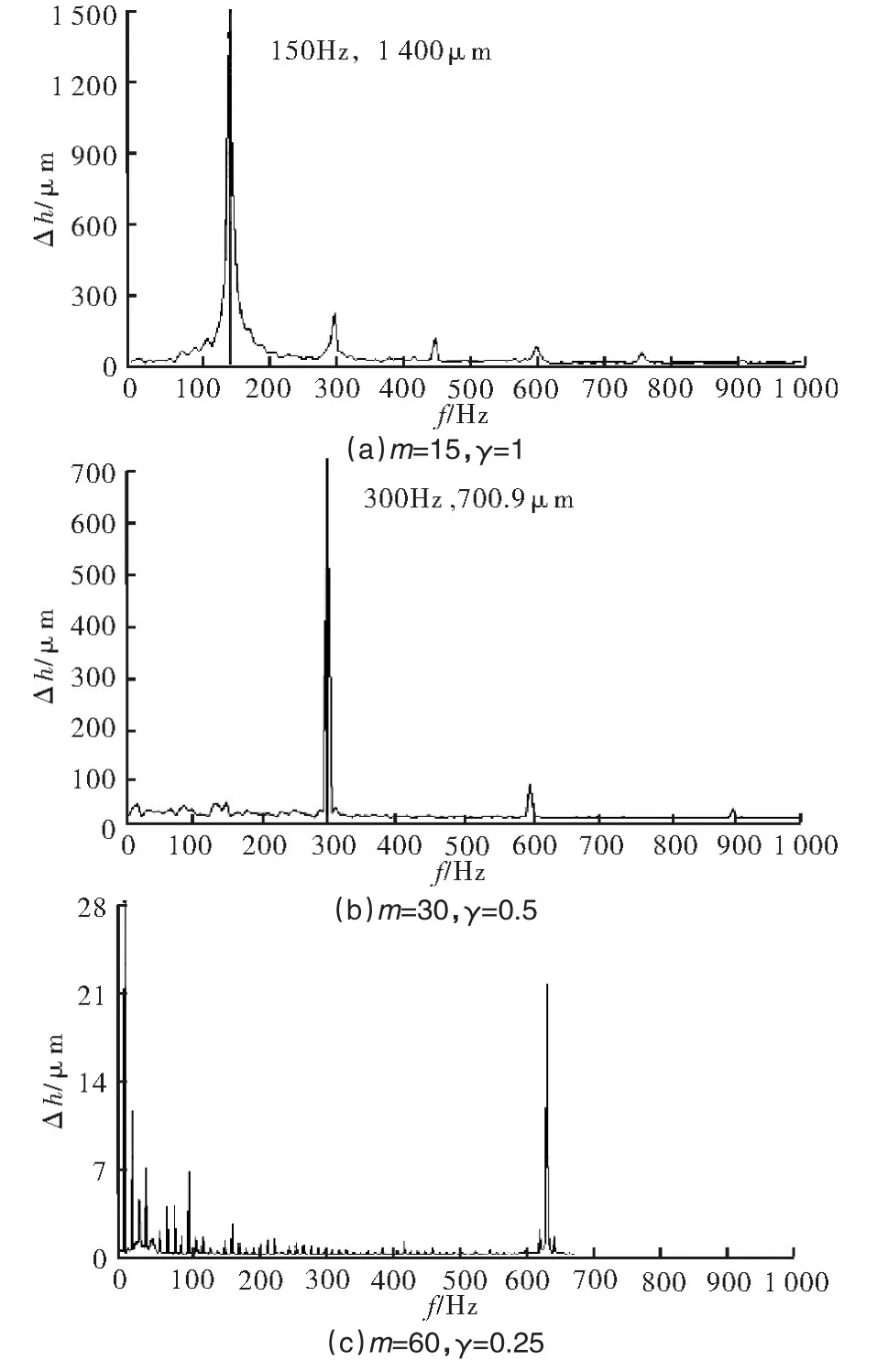
图6 不同齿数时ETC输出的频域信号图Fig.6 Frequency domain output about ETC with different gears
综合以上各图可看出:
1)当γ=1时,名义幅值Δh达到1 600μm,这时干扰信号对波形的影响几乎可以忽略,波形稳定性良好。从频谱上看,幅值与其它干扰频率的幅值的比值为10以上。
2)当γ=0.5时,名义幅值Δh约为600μm,此时干扰信号对波形的影响明显比γ=1时干扰信号的影响大,但基本上波形保持在稳定范围内。从频域看,主要成份为齿轮的脉冲频率,幅值与其它干扰频率的幅值的比值约为7;
3)当γ=0.25时,名义幅值急剧Δh下降为30μm,此时的波形稳定性很差,电磁干扰、扭振、径向振动等干扰信号对传感器输出信号产生了明显的“调幅”效应,如果直接对该信号进行分析,在阈值电压一定的情况下会导致“丢齿”的现象,在提取转速信号时产生误差[8]。由图7中对应的频谱中也可看出,工频分量(10Hz)的幅值要大于齿轮脉冲分量的幅值(600Hz)。
因此γ直接影响了传感器输出信号中各频率分量的成份,影响输出波形的稳定性。γ越小,传感器输出信号中转速引起的工频分量越大。根据当前实验结果,γ最好不低于0.5。
4 总结
综合以上分析可以得出以下结论:
1)ETC总输出电压是由静态偏置电压、动态电压和干扰电压三个部分组成,其中最终影响动态输出特性的是动态电压和干扰电压的叠加作用。
2)相对面积γ对静态偏置电压和动态电压都有影响,γ的减小导致静态偏置电压和动态电压的幅值降低。
3)随着γ的减小,干扰电压在ETC总输出电压中所占份额增大,测量结果相对误差增大,对其直接调制所获取的转速结果相对误差也会增大。为保证转速测量精度,γ最好不低于0.5。
[1]杨建刚.旋转机械振动分析与工程应用[M].北京:中国电力出版社,2007.
[2]徐东镇,王俊洪,杨志,等.制氧空压机在线轴振信号异常变化分析[J].风机技术,2011(2):70-73.
[3]Orestes J.Varonis,Nathan Ida Sensing and Imaging.Eddy Current Sensing of Torque in Rotating Shafts[J].Sensing and Imaging,2013, 14(3-4):81-92.
[4]和晓慧,刘振祥.风力发电机组状态监测和故障诊断系统[J].风机技术,2011(6):50-52.
[5]秦建国,刘伟.小型风力发电机转速控制研究[J].风机技术,2009(5):61-64.
[6]何斌,岳继光,杨灿军,等.探头参数对变面积电涡流传感器的影响及仿真研究[J].传感器技术,1999,18(2):7-9.
[7]张彦,何龙.电涡流式振动位移传感器的应用[J].DCS与自动化仪表,2013(5):64-67.
[8]李贵娥,麻红昭,沈家旗,等.电涡流检测技术及影响因素分析[J].传感技术学报,2009,22(11):1665-1669.
[9]Nath.Study of the New Eddy Current Nondestructive StingSensor on Ferromagnetic Materials[J].IEEE Transactions on Magnetics,1994, 30(6):44-46.
[10]马运翔.旋转机械扭转振动测试与分析技术研究[D].南京:东南大学,2014.
Effect of Gears Relative Area on the Eddy Current Transducer Output
Lv-ye ZhangXiao-dong ZhuHai-bo XingXing-jun FuRui Guo
(Southeast University,School of Energy and Environment,National Engineering Research Center of Turbo Generator Vibration)
The shaft speed is a fundamental parameter of rotating machinery,and the eddy current transducer(ETC)is the most common measuring tool.The tooth and groove structures on the surface of the gear reduce the continuous surface area. The relative area,however,affects the output characteristic of the ETC and speeding acquisition directly,where the number of gear teeth is one of the most important factors that affect the gear relative area.A mathematical model is developed to predict the output characteristics for different number of teeth.The results indicate that:(1)the ETC total output voltage signal includes static voltage,bias voltage,dynamic voltage and interference;(2)Reducing the relative area leads to static bias voltage and to a decrease of the dynamic voltage amplitude;(3)Reducing the relative area increases the share of the interference voltage in the total output voltage.Accompanied by the increase of the relative error of the total output voltage,the rotational speed results will increase.
eddy current transducer,relative area,speed measurement,gear
TH132.4;TK05
1006-8155(2017)02-0061-05
A
10.16492/j.fjjs.2017.02.0011
国家自然科学基金项目(51206025);教育部博士点基金(20120092120013)
2016-08-27 江苏 南京 210096
