基于FPGA的蓝牙智能小车的设计与实现
2017-05-11周庆芳
周庆芳
【摘要】针对传统的智能控制系统中传输介质依赖、实时性不高、安全性不好以及软硬件匹配工程浩大、成本高的问题本系统基于蓝牙无线傳输技术以及FPGA技术设计实现智能控制小车,充分利用蓝牙技术和FPGA的天然优势。
【关键词】FPGA 蓝牙智能小车 设计
一、设计原理
本实例以FPGA为下位机,智能手机为上位机,通过蓝牙接口实现智能手机与FPGA开发板的通信,进一步达到手机对小车的控制。现代的大部分电子产品都基于可编程的中央处理器,这些处理器都可以与蓝牙芯片进行串口通信,蓝牙技术的适用性十分广泛。基于蓝牙技术的智能控制系统,只需在载有处理器的下位机上增加蓝牙模块,配置通信协议,实现串口通信,就可以实现基于蓝牙技术的智能控制系统。
二、硬件设计
(一)电机驱动模块的设计
本系统使用L298N作为电机驱动芯片。L298N是一个具有高电压大电流的全桥驱动芯片,它相应频率高,一片L298N可以同时驱动2个二相或1个四相步进电机,接收标准TTL逻辑准位信号,且可以直接透过电源来调节输出电压。此芯片可直接由FPGA的10端口来提供模拟时序信号。ISEN A和ISEN B可与电流侦测用电阻连接来控制负载的电路;OUT1、OUT2和OUT3、OUT4之间可分别接2个步进电机;IN1~IN4输入控制电位来控制电机的正反转;使能端ENA和EN B则控制电机停转。用该芯片作为电机驱动,操作方便,稳定性好,性能优良。
(二)超声波模块的设计
本系统使用的超声波模块主要实现的功能是测距并返回数据。超声波测距模块通过发射电路和接收电路测出时间差T,然后根据公式S=CT/2算出小车距离障碍物的距离S(其中C为超声波在空气中的传播速度)。FPGA实时接收和处理距离信号,并将处理后的信号转换为控制指令。当到达警报距离时,FPGA控制电机驱动模块使小车减速;当到达极限距离时,FPGA控制电机驱动模块使小车马上左转。此处的左转是依照左手定则,当小车的前方和左方都有障碍物时,小车左转两次,实现向后运动。
(三)蓝牙模块的设计
本系统使用的蓝牙模块是SH-HC-06,利用串口UART协议进行收发数据。手机蓝牙作为客户端,小车上的蓝牙模块作为服务端。客户端通过蓝牙与服务端进行数据传输,服务端将接收到的客户端信号传给FPGA控制模块,FPGA接收并处理数据,然后再把处理后的数据发回去。发送格式为:1bit起始位,8bit数据,1bit停止位。整个通信处理过程可细分为数据接收和数据发送。
三、系统综合与仿真测试
1.超声波模块
在超声波模块仿真过程中,涉及蓝牙模块实时采集数据,但是仿真环境中无法实现。
2.砸动模块
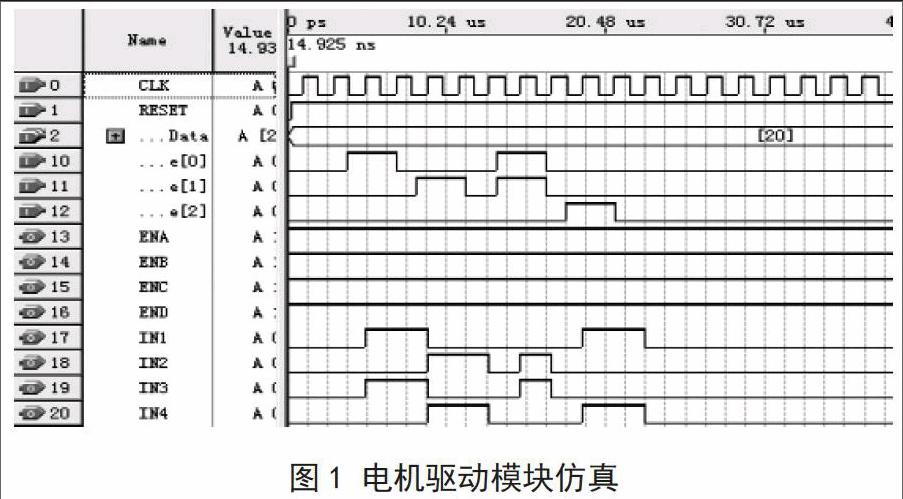
图1为小车驱动控制模块仿真图,CLK为时钟信号输入端,RESET为重置信号输入端,PWM_Data为占空比信号输入端,Car_State为小车状态控制输入端,ENA、ENB、ENC、END为占空比输出端,IN1、IN2、IN3、IN4为小车驱动控制模块控制电机的输出端。在本次仿真中,占空比设置为20,小车状态为O时四个电机均无输出;小车状态为1时,小车前进,输出状态为1010;小车状态为2时,小车掉头,输出状态为0101;小车状态为3时,小车左转,输出状态为0110;小车状态为4时,小车右转,输出状态为1001。
四、系统总结
本文详细介绍了基于FPGA的超声波避障小车的设计过程。该系统可以蓝牙技术实现智能手机与智能小车的无线通信,将智能手机作为上位机,FPGA开发板作为下位机,实现对智能小车的遥控。在系统的硬件调试过程中,该基于FPGA的超声波避障小车能够正确地实现超声波测距的功能,并由FPGA控制电机驱动模块,实现小车的运动和避障,可广泛应用于工业控制、广播电视、视频监控、网络安全以及汽车电子等方面,具有很好的实际应用前景。
