基于模糊PID控制的永磁同步电机控制器研究
2017-05-10陈胜来
欧 峰,陈 洪,陈胜来
(中国工程物理研究院 总体工程研究所,四川 绵阳 621900)
基于模糊PID控制的永磁同步电机控制器研究
欧 峰,陈 洪,陈胜来
(中国工程物理研究院 总体工程研究所,四川 绵阳 621900)
为了提高复杂环境条件下永磁同步电机(PMSM)控制器的动态控制性能与抗干扰能力,分析了永磁同步电机的速度-电流(或力矩)双闭环控制调速结构,提出了一种基于模糊PID控制原理的速度环控制策略;速度环运行时,模糊PID控制器首先将永磁同步电机转速的误差及误差变化率进行模糊化处理,然后依据模糊规则进行模糊推理,并自动在线整定出速度环PID的3个系数(比例系数、积分系数、微分系数),不仅减少了速度环的调节时间,也能增强抵御来自电流环(或力矩环)的干扰;仿真结果表明,当永磁同步电机的转速发生变化或负载发生扰动时,相比于传统的PID控制器,模糊PID控制器能提高系统的动态性能与鲁棒性;该方法用于永磁同步电机的控制是可行、有效的。
模糊PID控制;自整定;永磁同步电机
0 引言
永磁同步电机(PMSM)具有高效率、高力矩惯量比、高能量密度等优点[1],越来越引起人们的重视。但在许多实际控制过程中,PMSM并没有完全发挥出其优越的性能,原因在于工程人员仍然采用简单的PID控制器进行调节,虽然PID控制算法简单,易于实现,但主要依赖工程人员的经验,由于参数确定后无法自动修改,因而自适应性和鲁棒性较差,只适用于控制精度要求不高,模型不发生变化的定常系统。然而,航空、航天领域的传动系统运行环境特殊,气压、温度、加速度、振动等环境因素对控制系统的动态控制性能以及抗扰动能力要求极高[2],因此,简单的PID控制器无法保障PMSM的控制性能时时优良。
而模糊控制器在设计时不需要依赖被控对象的精确数学模型,只需要将工程人员的控制经验总结成表格并存于计算机内存以供计算机时刻查询,因此,系统的实时性高、鲁棒性强,尤其适用于非线性系统的控制,但由于不具有积分环节,因而稳态精度不高。因此,本文将PID控制与模糊控制相结合,设计在了一种适用于PMSM的模糊PID控制器以取代传统的PID控制器,通过仿真试验证明,该控制器实现了PID参数的自整定,且具有良好的动态性能与鲁棒性。
1 PMSM调速系统的结构
本文以面装式PMSM为研究对象,结构如图1所示。同三相感应电机一样,需要按照矢量变换的原理,将PMSM三相电流的空间矢量由ABC轴系变换到同步旋转dq轴上,坐标转换公式为:
(1)
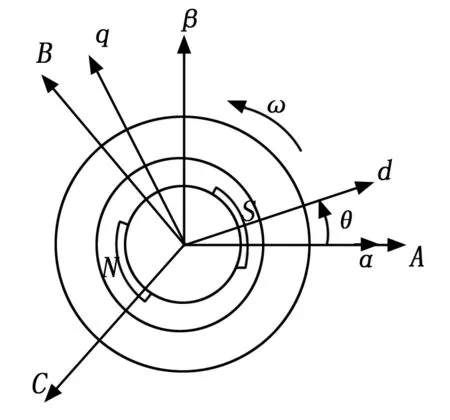
图1 PMSM结构及坐标转换
由于dq轴系是沿转子磁场定向的,这样PMSM就等效为一台他励直流电机,可以通过电流iq直接控制转矩,可以获得良好的稳态和动态性能,此时电磁转矩[3]为:
te=pnψfiq
(2)
在实际控制过程中,PMSM的控制系统主要采用速度-电流(或力矩)双闭环控制结构,速度环和电流环(或力矩环)都通过PID控制器进行调节,为了简化分析,本文设计的模糊PID控制器只是替代速度环的PID控制器,仍然保留电流环的PID控制器,如图2所示。其中电流可控PWM模块的电流控制采用的是滞环比较控制,可以使实际电流快速跟踪指令电流。
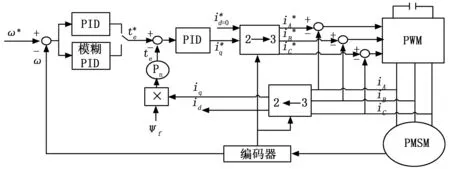
图2 PMSM速度-电流(或力矩)双闭环控制结构图
2 模糊PID控制器的设计
2.1 模糊PID控制器的基本原理
模糊PID控制器是将PID控制器与模糊控制器相结合,结构如图3所示。模糊PID控制器在运行过程中不断检测误差e和误差变化率ec,并将其模糊化,然后依据模糊规则进行推理,经过清晰化后再输出3个参数Δkp(比例系数)、Δki(积分系数)和Δkd(微分系数)给PID控制器,并依据公式(3)实现对PID控制器3个参数的自整定,以满足不同的e和ec状况下对PID控制器参数的要求,从而使被控对象的动态性能显著提高[4-5]。其中,kpo、kio和kdo分别是kp、ki和kd的初始值,Δkp、Δki和Δkd分别是kp、ki和kd的变化量。
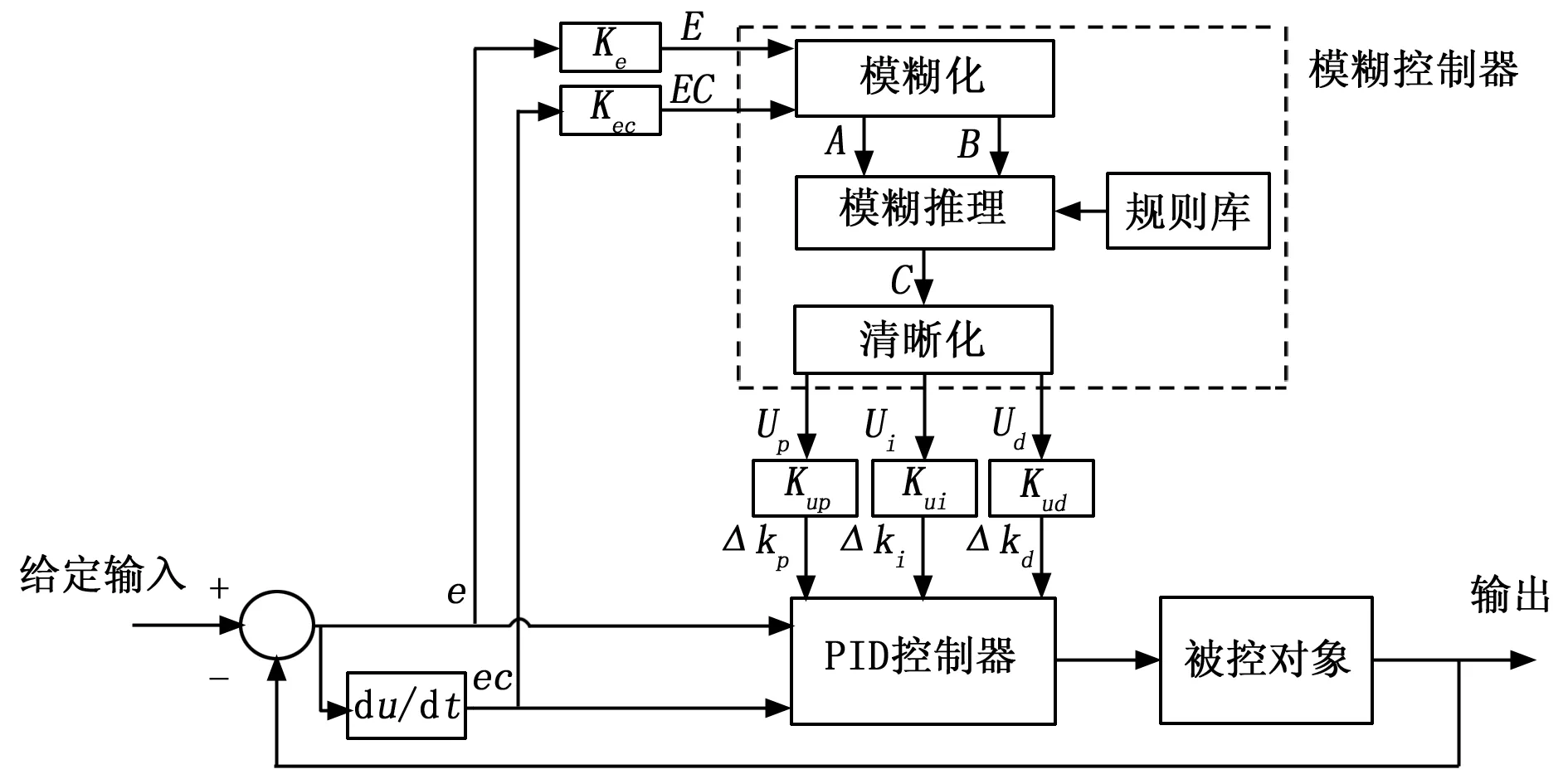
图3 模糊PID控制的原理图
(3)
2.2 模糊控制器的设计
模糊控制器的结构如图3所示,主要包括模糊化、模糊推理、规则库和清晰化4个部分。
2.2.1 模糊化
模糊化是模糊控制的第一项任务,需要输入值、输出值从精确值转换为模糊值,这包括以下过程:
1)根据量化因子Ke、Kec将实际检测到的误差e和ec的精确值转换为语言变量E、EC,并根据比例因子Kup、Kui和Kud将模糊控制器的3个输出精确值Δkp、Δki和Δkd转换为语言变量Up、Ui、Ud;
2)将语言变量E、EC、Up、Ui、Ud量化到有限整数的离散论域,例如{-6,-4,-2,0,2,4,6},并取对应的语言值为{NB,NM,NS,ZO,PS,PM,PB},即负大、负中、负小、零、正小、正中、正大;
3)定义输入和输出变量的隶属度函数,本文为了提高灵敏性,统一选用三角型隶属度函数(如图4所示)。
通过以上3个过程就可以将输入、输出共5个精确信号全部模糊化,变成模糊信号[6-7]。
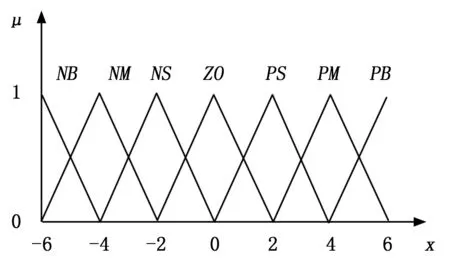
图4 e、ec、Δkp、Δki和Δkd的隶属度函数
在模糊化过程中,量化因子Ke、Kec和比例因子Kup、Kui和Kud的选择十分关键,对控制效果有很大影响。设误差e的最大、最小偏差值分别为eH和eL,设误差变化率ec的最大、最小值分别为ecH和ecL,设控制器输出量Δkp、Δki、Δkd的最大值分别为uHp、uHi、uHd,最小值分别为uLp、uLi、uLd,且各语言变量的论域统一取{-m,m}时,则可通过如下公式确定量化因子和比例因子[8-9]:
(4)
(5)
(6)
(7)
(8)
在确定了量化因子后,误差e、误差变化率ec,可通过下式转换为E、EC:
(9)
(10)
在确定了比例因子后,输出变量Up、Ui、Ud可通过下式转换为Δkp、Δki和Δkd[10]:
(11)
(12)
(13)
2.2.2 规则库
kp、ki和kd三个参数的整定必须考虑在任意时刻3个参数的作用及相互之间的关系,一般情况下需遵循以下原则:
1)当|e|较大,需要选择较大的kp以使系统快速响应,为了防止大的|e|引起微分溢出,应取较小的微分系数kd,为了减小系统的超调量需要减小其积分作用,即选用较小的ki;
2)当|e|和|ec|为中等大小,需适当减小kp以防止系统超调量过大;kd和ki取值适中;
3)当|e|很小,需增大kp与ki以减小系统|e|态误差;kd的取值要适当以避免系统振荡,当|ec|较大,kd可偏小些,当|ec|较小,kd可偏大些。
根据以上原则建立的Δkp、Δki和Δkd模糊规则[11-12]表如表1所示。
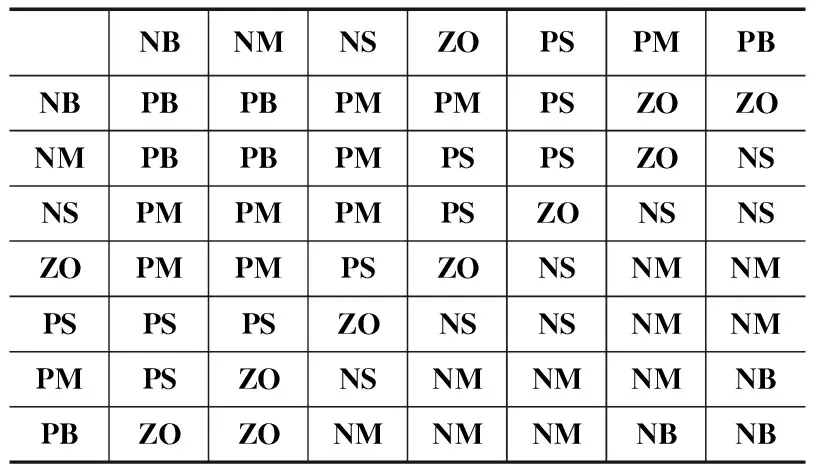
表1 Δkp的规则表
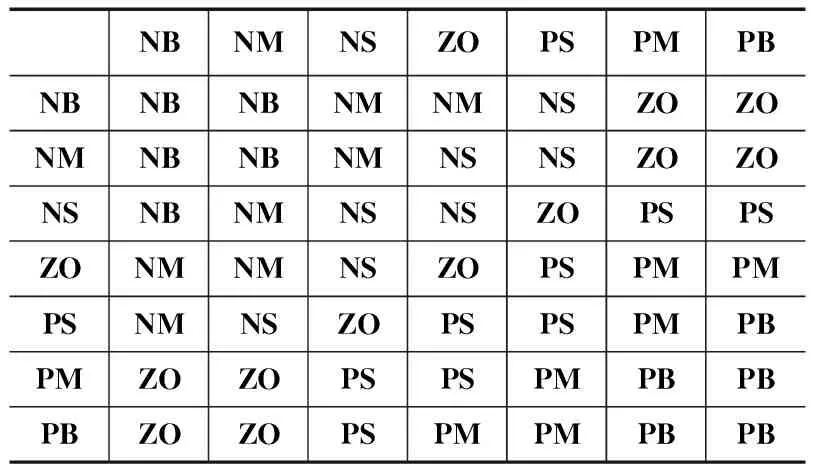
表2 Δki的规则表
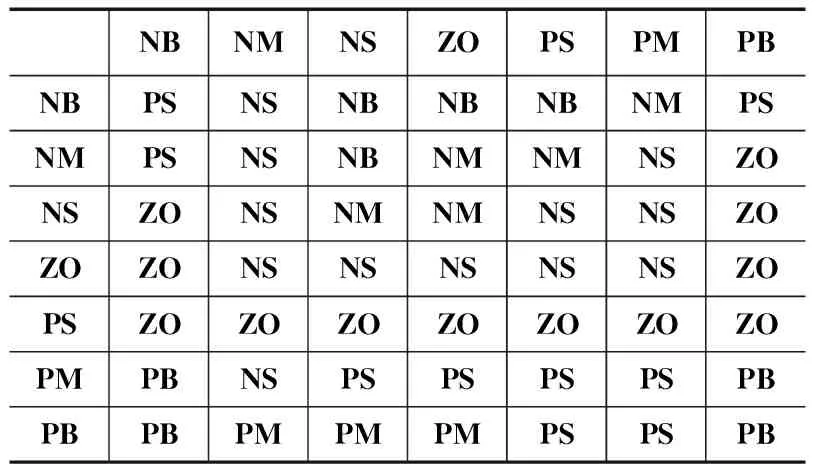
表3 Δkd的规则表
通过Matlab的模糊工具箱可以得到Δkp、Δki和Δkd规则的三维曲面,如图5~7所示。
2.2.3 模糊推理
上述规则表中任意一条规则都可以表示成Ri:IF(eisAi)and(ecisBi)THENuisCi的形式,则整个规则库可以表示成:
R1:IF(eisNB)and(ecisNB)THEN(ΔkpisPB)and(ΔkiisNB)and(ΔkdisPS)
……
R49:IF(eisPB)and(ecisNB)THEN(ΔkpisPB)and(ΔkiisNB)and(ΔkdisPB)
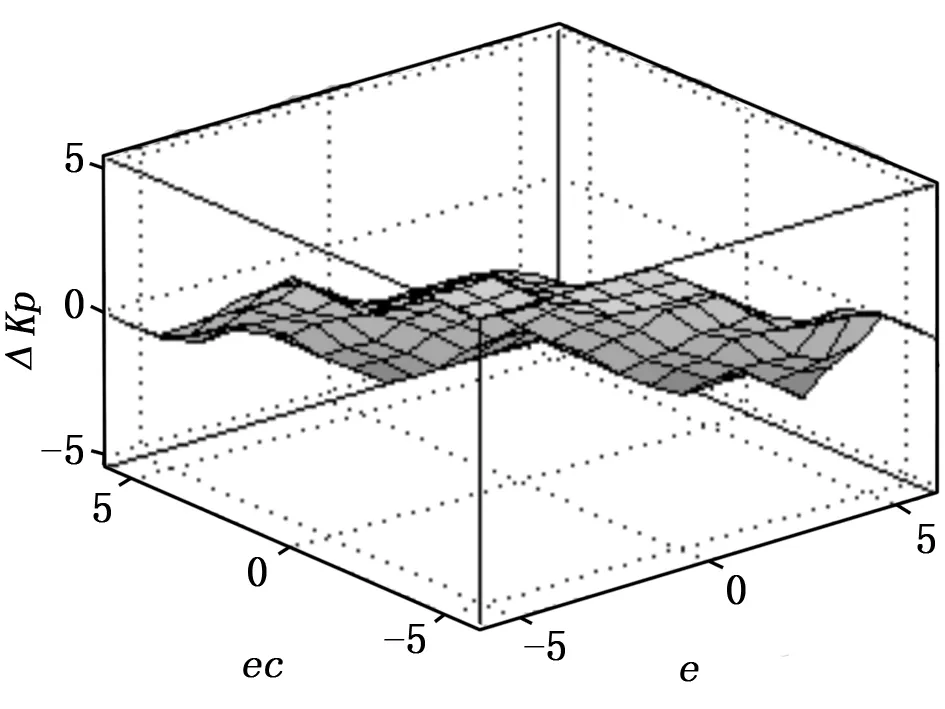
图5 Δkp规则的三维曲面
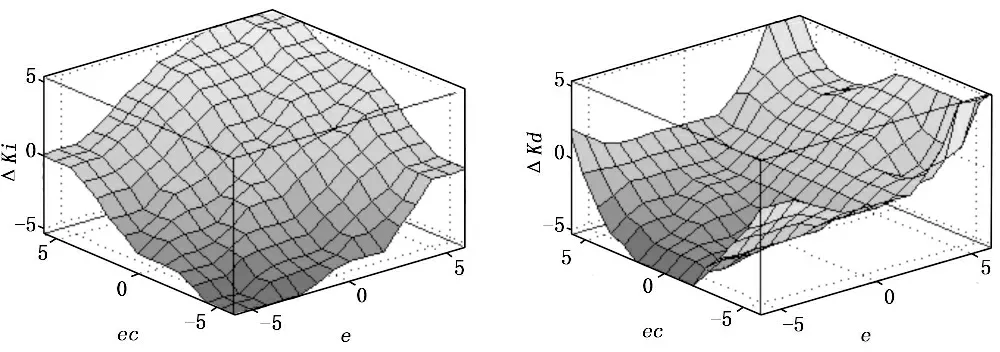
图6 Δki规则的三维曲面 图7 Δkd规则的三维曲面
共49条模糊控制条件语句,每一条模糊语句都蕴含了一条模糊关系。通过49个模糊关系的“并”运算,可得出系统总的模糊关系R。因此,任意时刻的输入e和ec,对应各自的Ai和Bi,与R做矩阵合成运算就可得到模糊输出量Ci,公式[13]如下:
Ci=(Ai×Bi)°R
(14)
2.2.4 清晰化处理
模糊输出量Ci经过清晰化处理(采用面积中心法[14],见公式11),即可得出PID的精确输出值Up、Ui、Ud。
(15)
再根据公式(9)就可以得出Δkp、Δki和Δkd,最后依据公式(3)就可以实现对PID的3个参数的自整定。
3 仿真与结果
3.1 仿真模型搭建
为了验证算法的准确性,通过SIMULINK搭建了PMSM调速系统仿真模型[15],并对比了模糊PID控制和常规PID控制两种控制策略的仿真效果,系统模型如图8所示,其中模糊PID控制器的子模块如图9所示。
3.2 相关参数设置
3.2.1 电机参数设置:
PMSM基本参数为:永磁同步电机定子电阻Rs=0.98Ω,d轴等效电感Ld=5.5mH,q轴等效电感Lq=8.5mH,转子磁链ψf=0.3Wb,转动惯量J=0.001 07kg·m2,极对数p=2。
3.2.2 控制器参数设置
1)PID控制器的参数设置:PID控制器的参数可以通过简单的人工整定来获得,例如:kp=0.5、ki=1.5和kd=0.2。
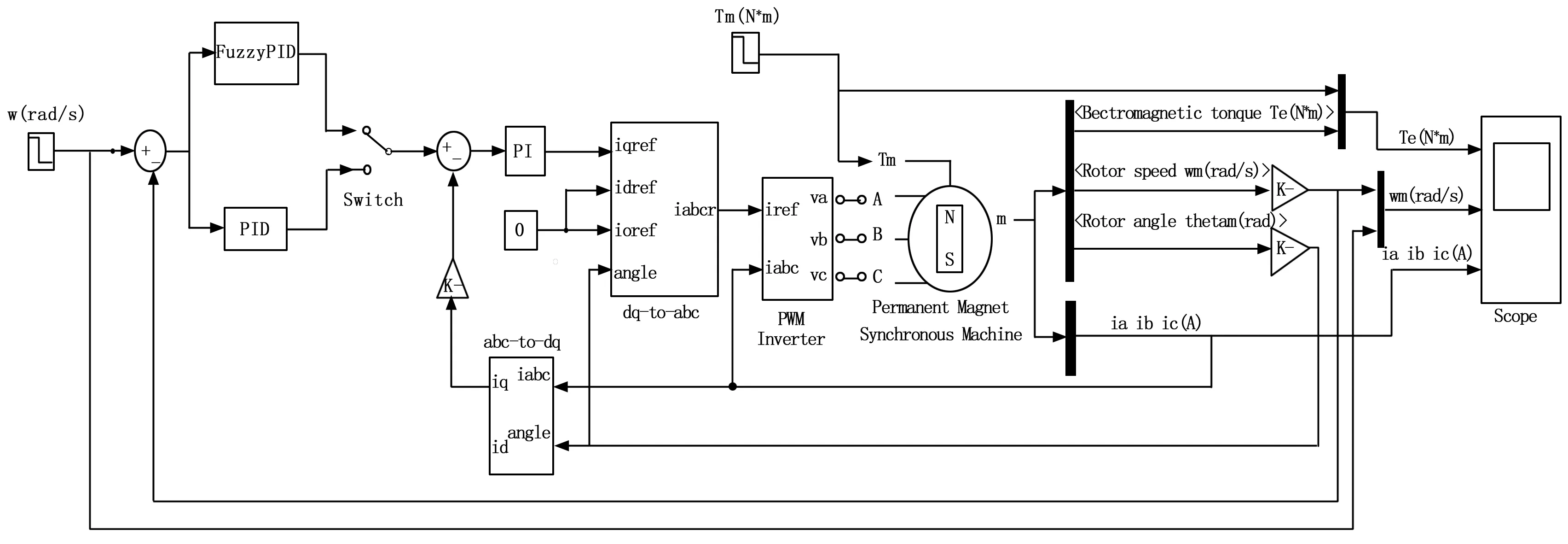
图8 PMSM调速仿真模型(模糊PID和PID两种速度环调节器)
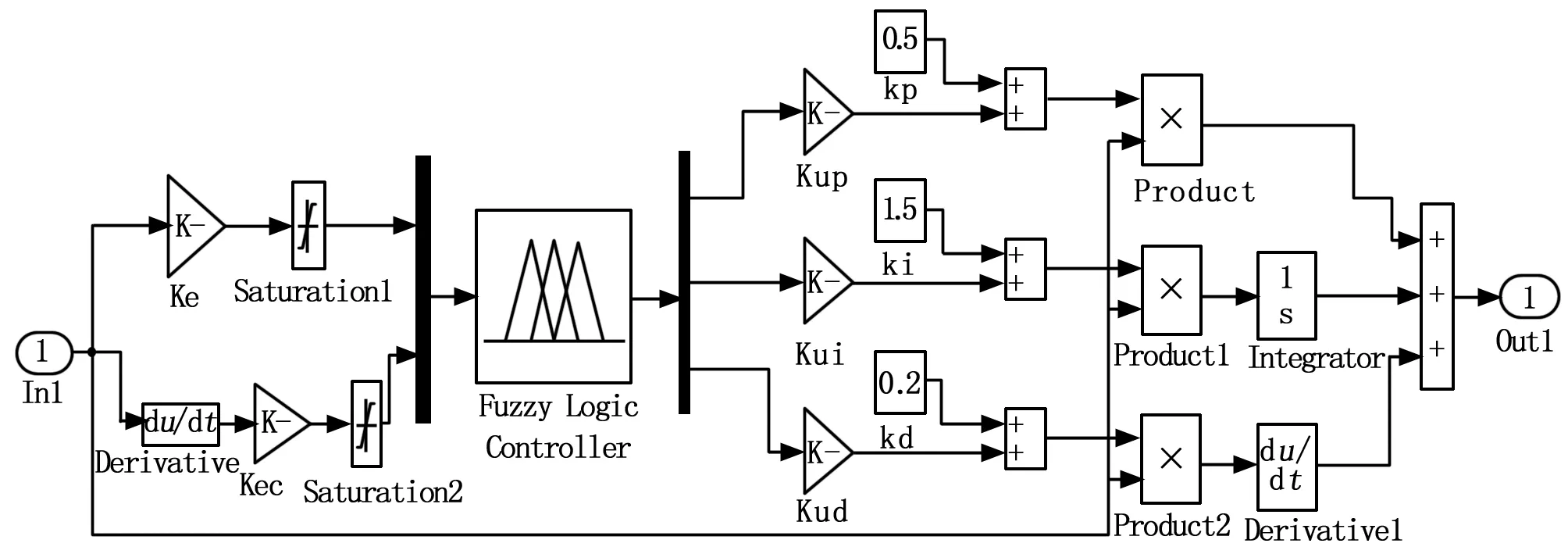
图9 基于模糊PID控制的速度调节器模块
2)模糊PID控制器的参数设置:为了便于对比控制效果,模糊PID控制器中的PID参数初始值也应设置为kpo=0.5、kio=1.5和kdo=0.2。而模糊PID控制器的输入和输出论域取值分别为e=[-60,60]、ec=[-30000,30000]、Δkp=[-6,6]、Δki=[-1.2,1.2]和Δkd=[-3,3]。由计算公式(4)~(8)可以分别求出量化因子Ke=0.1、Kec=0.000 2和比例因子Kup=1、Kui=0.2和Kud=0.5。
3.3 结果对比
采用PID控制器和模糊PID控制器的仿真试验结果对比如图10所示,具体分析如下:
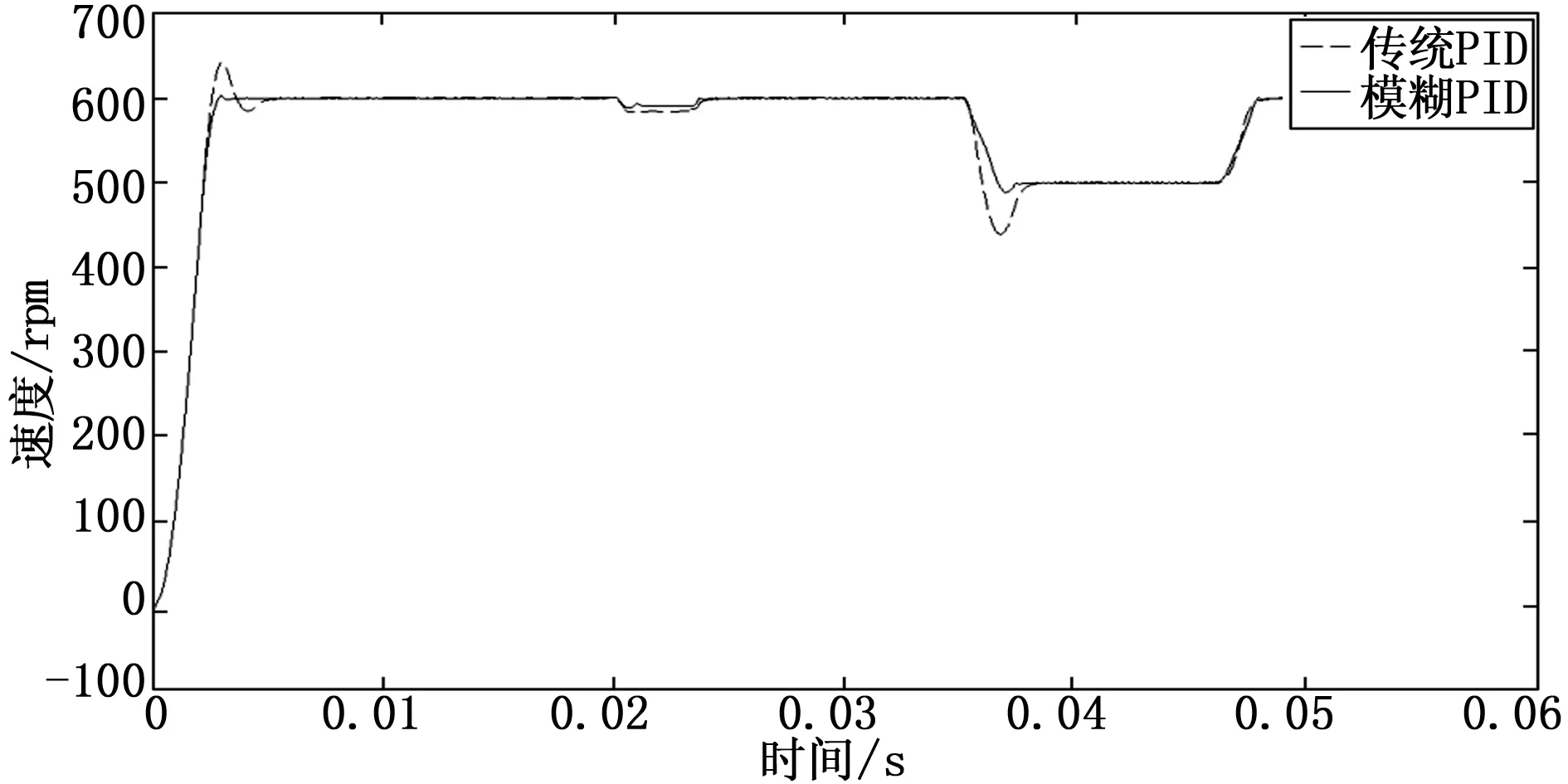
图10 仿真结果对比
1)动态控制性能对比:在试验开始时,给定电机参考速度为600rpm,负载为1N·m,采用PID控制时,速度超调7.5%,调节时间为0.006s;而采用模糊PID,速度超调0.42%,,调节时间为0.003s。
在试验进行到0.035s时,给定电机参考转速设定为500rpm。对比仿真曲线(图1),采用PID控制时,速度超调为13%,响应时间为0.003s;而采用模糊PID,速度变化为2.4%,响应时间为0.002s;
2)抗负载扰动能力对比:在0.02s时,电机负载增大到8N·m。采用PID控制时,速度变化为2.3%,响应时间为0.002s;而采用模糊PID,速度变化为1.5%,响应时间为0.001s;
在0.024s时,电机负载恢复到1N·m。对比仿真曲线(图10),采用PID控制时,响应时间为0.001s;而采用模糊PID,响应时间为0.000 6s。
通过以上对比结果可以说明:相比于传统的PID控制,模糊PID控制在PMSM伺服控制系统的动态控制性能与抗扰动能力方面更胜一筹,而且实时性好、鲁棒性强。
4 结论
本文基于模糊PID控制的原理,设计了PMSM的速度环控制器,该控制器综合了PID控制与模糊控制的优点。经过仿真对比,本文提出的模糊PID控制策略相对于传统的PID控制策略,具有良好的动态性能与扰动抑制能力,实时性好、鲁棒性强,该控制器简单、有效,对PMSM的控制有一定的借鉴意义。
[1] 梁新涛. 基于模糊控制的永磁同步电机控制研究[J].机电信息, 2014,33(1): 114-116.
[2] 唐任远. 现代永磁电机理论与设计[M].北京:机械工业出版社,2000.
[3] 张小新. 高性能永磁同步电机矢量控制系统的研究[D].哈尔滨:哈尔滨理工大学,2009.
[4] 樊兆峰. 基于嵌入式计算机的煤气炉风门模糊PID控制[J].计算机测量与控制, 2010,18(10):2308-2311.
[5] 雷金莉.永磁无刷直流电动机的自学习模糊PI控制[J]. 微特电机,2013,4(13):36-39.
[6] 钟晓伟,宋蛰存. 模糊PID控制器在无刷直流电机控制系统中的应用[J]. 化工自动化及仪表, 2010, 37(8): 87-89.
[7] 罗文明,王少杰. 基于模糊PI控制的永磁同步伺服电机转速系统仿真分析[J]. 自动化技术与应用, 2014.33(11):67-72.
[8] 原 杰,赵永瑞. 永磁同步电机模糊PID控制建模与仿真[J].系统仿真技术, 2013,9(4):361-365.
[9] 王树青. 先进控制技术及应用[M].北京:化学工业出版社,2001.
[10] 王耀南,孙 炜,等. 智能控制理论及应用[M].北京:机械工业出版社,2011.
[11] 杜荣华,朱 昭.无刷直流电机自适应模糊PID控制及仿真[J].长沙理工大学学报(自然科学版), 2014,11(2):60-66.
[12] 张井岗,吴聚华,曾建潮. 模型参考自适应内模控制及其仿真研究[J]. 系统仿真学报,1997(2).
[13] 文 双, 胡育文, 鲁文其, 等. 永磁同步电机模糊PID参数自整定[J]. 微特电机,2011,1(5):17-21.
[14] 吕东阳,王显军.基于模糊PID控制的电机转台伺服系统[J]. 计算机应用,2014,34(S1):167-169.
[15] 王成元,夏加宽,孙宜标.现代电机控制技术[M]. 北京:机械工业出版社, 2014.
Research on Fuzzy PID Control for PMSM
Ou Feng, Chen Hong, Chen Shenglai
(Institute of Systems Mechanics, China Academy of Engineering Physics, Mianyang 621900, China)
To improve the dynamic response speed and disturbance rejection ability of PMSM control system, by analyzing of the double closed-loop control system structure of velocity and current (or torque) for PMSM, a velocity loop control strategy based on the fuzzy PID control principle is proposed. The fuzzy PID controller firstly fuzz up the error and change rate of error of rotate speed for PMSM, then it carries out the fuzzy reasoning by the fuzzy rules, and the controller can adjust three coefficients of the PID(proportion coefficients, integration coefficients, differentiation coefficients) of the velocity loop automatically online, it not only reduces the adjust time of the velocity loop, but also can reject the disturbance of the current loop (or torque loop). The simulation results show that compared with the traditional PID control strategy, the fuzzy PID control strategy can improve the dynamic performance and robustness of the system. The proposed method is feasible and effective for the PMSM control.
fuzzy PID control; self-tuning; PMSM
2016-10-20;
2016-11-21。
国防科工局技术基础基金(JSHS2014212B001)。
欧 峰(1982-),男,四川广元人,硕士,工程师,主要从事计算机控制技术、机电设备的研发工作。
1671-4598(2017)04-0040-04
10.16526/j.cnki.11-4762/tp.2017.04.013
TP273
A