基于自适应背景的目标跟踪算法研究
2017-05-10吴贤平沈良忠
吴贤平,沈良忠
(1.浙江安防职业技术学院,浙江 温州 325016; 2.温州大学,浙江 温州 325035)
基于自适应背景的目标跟踪算法研究
吴贤平1,沈良忠2
(1.浙江安防职业技术学院,浙江 温州 325016; 2.温州大学,浙江 温州 325035)
随着现在的社会发展以及经济进步,我国的科学技术方面发展迅速,特别是在技术监控方面更是突飞猛进;为了更好地对目标遮挡影响进行降低,我国在这方面主要依据自适应的技术发展背景下提出目标跟踪计算法,用来完善我国的监督控制技术;这种计算方式第一是根据对观察目标的基本外观形态进行的鉴定与跟踪,将其自身的运动量进行平均计算;其次是根据时空的运行方向与特征进行跟踪目标的计算,建立比较完善整体的运行模型,再根据这个运动模型以及整体的状态对监督目标进行检测与控制,这期间就会形成一种遮挡掩膜;对于掩膜是一种将程序数据等绘制成光刻板,在程序使用期间非常可靠,并且制造成本比较低,使用方便;最后在不同的使用情况下将不同参数进行收集,自动地适应运动模型的运行;针对这种计算方式的实验主要是利用两种在国际上经常使用的CAVIAR、York数据进行测试,并且根据这两种数据对测试的精准度与多重目标跟踪等进行评定,检测跟踪的整体性能;通过多方面的研究表明这种方式的跟踪的性能非常好,并且还能很好的将跟踪目标的鲁棒性进行遮挡。
自适应背景;目标跟踪法
0 引言
在现在的高科技计算机研究发展下,主要的研究热点还处于对于运动的跟踪目标分析探索中,这种目标跟踪算法在我国很多智能方面有广泛的应用,其中包含导航的制作使用、智能人工制作过程中以及在监控的视频等方面应用非常广泛。在很多关于这方面的著作中提出了关于均值漂移的计算方式,主要是为了对目标的跟踪领域进行调查与跟踪,这种方式最基本的创立思想是根据移动最基本的概率进行精准详细的跟踪与判断,找出其中最适合的匹配点,从而实现具体目标的跟踪[1]。但是这种跟踪方式在对光线变化比较快的基础下鲁棒性比较弱。那么怎样更好的将这种计算方法在对光线变化比较频繁并且跟踪的目标不清晰或是遮挡的情况下进行监督控制,是现在目标跟踪算法最大的问题之一。文章主要根据相关的参考文献中提到的关于这方面颜色的变化,以及这种变化对于这种算法的影响进行分析与研究,根据不同的计算方式对其鲁棒性进行强化。文章主要根据现在这种自适应的背景下对目标跟踪算法进行详细的研究与分析,并且从全方面角度进行探索。
1 目标跟踪算法运用与研究
根据上述内容中对于这种算法简单的介绍,我们知道这种目标跟踪算法在我国计算机以及高科技上的应用非常广泛,但是其中也有很多需要进行完善的方面。针对这方面的研究我国一直在不断的进步,并且从很多方面能够很好地将其进行创新与完善。上文中提出很多的计算方式会影响到鲁棒性变弱,并且遇到光线变化比较频繁的现象中就会影响其对于跟踪对象的判断,关于这方面我们提出一种根据颜色的变化以及图形的转换产生的漂移目标跟踪方式[2]。这种方法将我们需要跟踪的目标通过颜色的形式进行图形使的划分,并且提取出其中醒目的颜色分类,模仿成多次元的模式分析其特征,这种计算方式主要依据的是Meanshift算法,这种算法可以将鲁棒性特点进行强化,并且分析出被遮挡的跟踪目标。其中还有一种方法是根据跟踪目标的SIFT特点以及微电子中的粒子掌控过滤技术对目标进行跟踪的方式,这种方式主要是依照着对于目标自身热量的变化以及发出的光照进行对比,从而掌握其中变化与不变化的特点,可以在强化鲁棒性的基础上对光照等进行加强。
在这种算法发展的过程中还产生出一种重视视觉上跟踪的计算方式,增量视觉跟踪方法(Incremental Visual Tracker,IVT)[3]。这种跟踪计算方法能够在进行跟踪过程中,自适应跟踪目标的变化,以及光线的调整等,并且在比较封闭的空间中能够根据一项微弱的因素搜索出跟踪目标,其中还能掌握跟踪数据的变化,降低对于跟踪数据在整体中的客观影响,自动屏蔽影响跟踪目标的各种外来因素。这种跟踪方式非常适用于短期的跟踪,但是若是在比较长时间的跟踪偶成中还存在一定的缺陷,不能很好的把握全面遮挡的状态。当然,针对在这方面遇到的跟踪目标被遮挡一部分或是全部被遮挡等问题,文章探索出一种根据时空整体运行方向以及能量控制,在自适应的基础下自动更新的跟踪方式。Spatiotemporal OrientedEnergies,SOE.这种跟踪方式能够根据对时空变化的掌握进行动态模式的分析,同时这种分析以动态的纹理进行识别以及不同场景进行分辨、行为变化的分析以及视觉上的监督与计算等展现出来。我们主要分析的是将这种SOE的特点为跟踪的线索进行详细的跟踪分析[4]。在现在这种跟踪技术发展的基础上对于跟踪的模式以及目标的运行形势等进行更新,并且逐渐的向自适应的形式靠拢,保证跟踪期间不受到客观因素的影响。与此同时,还要根据状态中的不同机区之间的区别进行遮挡部分分析,大大提升在跟踪的整体过程中遮挡部分数据的使用与分析,同时因为全面的运用遮挡部分数据分析,可以提升对跟踪目标的掌握,提高使用性能。
2 跟踪视频中的SOE简述
利用这种技术对跟踪视频进行描述,主要的研究思路是依照一组全方面的具有多种时空方向的过滤系统产生3D的效果,在进行视频的处理期间需要将其中的序列进行过滤。文章主要是根据现在生产的第二代过滤器,采用3D形式G2(θ)其中还包括Hilbert的变换为H2(θ)格式的过滤器[5]。在此期间,θ表示的是3D视频跟踪的滤波轴的方向。其中这种计算方式中的过滤器对于这两种格式是可以进行独立掌控的,因为不管θ出于任何的方向中,其实都是一种线性的函数组合。若是以I(x.y.t)三种形式为具体的像素点,在这期间3种因素中的一项t跟踪期间的亮度可以在θ上这样进行展现:
Eθ(x,y)=[G2(θ)]*/(x,y,t)2+[H2(θ)*/(x,y,t)]2
式中,“*”代表的是对于跟踪视频中的卷积进行的计算。
在进行研究的过程中,3D的带通滤波器主要的使用方式是将其依据其自身中的对称轴进行空间的控制监督,若是在这期间没有回应,那么就证明在垂直方向的空间上会产生强烈的相应。这主要是为了更好地掌握时空方向以及时空模式下对于跟踪目标的掌控与出现频率产生的响应。这样的计算主体还要具有很多个高斯的衍生过滤器,组件一个波滤器组合,进行时间与空间上的掌控,其中对于某项运动能量的计算以及动态变化的掌握主要表现在:
式中,θ表示的整体的运行方向在n中的N+1产生的各种隔离方向与方向的转变,∑θ(x,y)主要是由其上述公式中的时空方向计算能量得出的。

其中:i∈[0,N],并且其中可以分解出另一个公式为:
式中,需要将其中的ex作为计算主运动轴中的标准单位量。


式中,ε为运行期间的噪音。
在整体的跟踪计算中将0作为对无纹理的视频图像进行处理,这种计算过程在对运动整体的状态进行计算期间内需要掌握其中涉及到的各种数据,并且将其进行具体的定义,方便在计算期间的使用,主要的表现形式为:

当然在这计算过程中对于E0的要求非常严格,需要掌握其中的大值才能进行更加准确的计算,在其他的计算方向中对于其中的数值并不可信[7]。所以将多个空间上的计算以及一个无纹理的的表达可以准确的将其中的像素运动点进行控制,并且表现为:

在进行计算之后会将其中的变化用图形表现出来,并且在进行最终的跟踪计算干扰方面需要掌握其中详细的数据信息,及时识别其中的干扰源,如图1和图2所示。
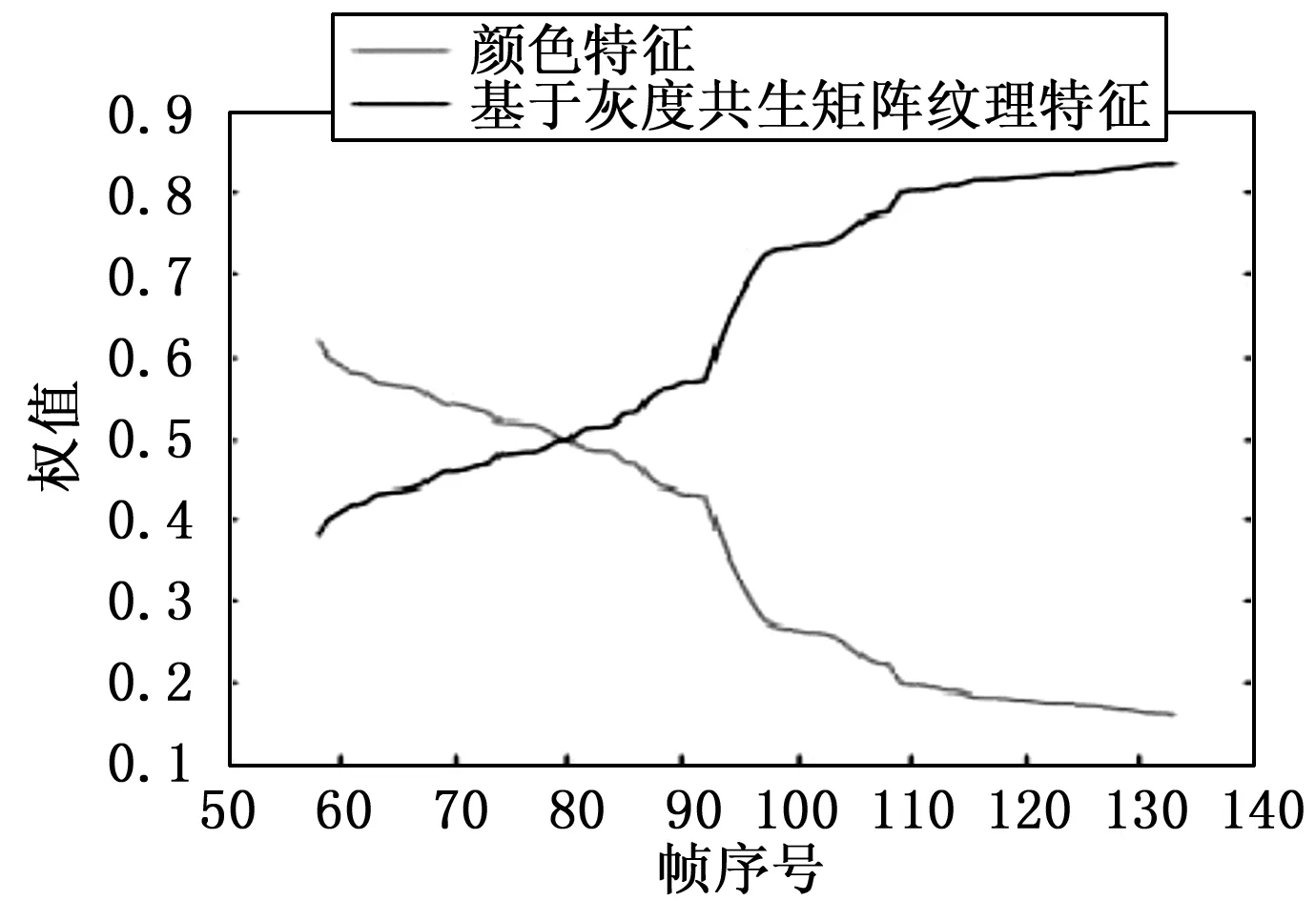
图1 特征图
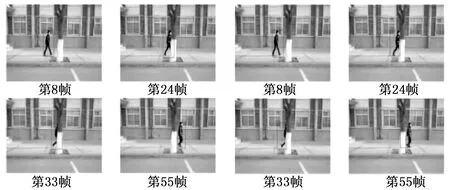
图2 帧图
这样就可以很好地保证其计算出的跟踪信息准确无误。
3 SOE研究基础上的跟踪目标核算
在上图中展示的跟踪信息绘制与展现我们可以看出在这种目标跟踪计算法下需要掌握其中的计算信息,并且认真核算之后在进行确定。对于有兴趣的跟踪目标来讲需要利用其自身的外观以及在跟踪中的运动等进行计算与整理,不断的将跟踪目标展现在面前,并且其中利用像素以及跟踪计算出的模型需要掌握运动的整体量的变化,并且运动的模型适用于跟踪中检测的遮挡部分,了解到跟踪目标现有的状态[8]。在进行跟踪计算过程中不仅需要我们掌握其中像素整体展现出的亮度,还要掌握其中需要计算的目标以及平均运动量计算,利用这种方式将提算出SOE对于目标静止或是动态中展现出的量的变化,利用这些数据建立运动的模型与运动环境描述[9]。在跟踪期间会出现遮挡的部分,这时候就需要利用计算中的遮挡膜计算方式对其进行控制,及时更新其中计算需要的数据,防止被破坏,并且还要降低跟踪目标的漂移现象。在进行计算或是跟踪整体的过程中一定要及时保证设备的使用状态以及在运动期间的对量的摄入,利用不同形式对不同跟踪目标的状态进行计算与跟踪。这种目标的跟踪模型在进行跟踪的过程中会自动适应其运行的状态,自适应地降低不利因素,自觉地坚实跟踪目标的变化。如图3所示。
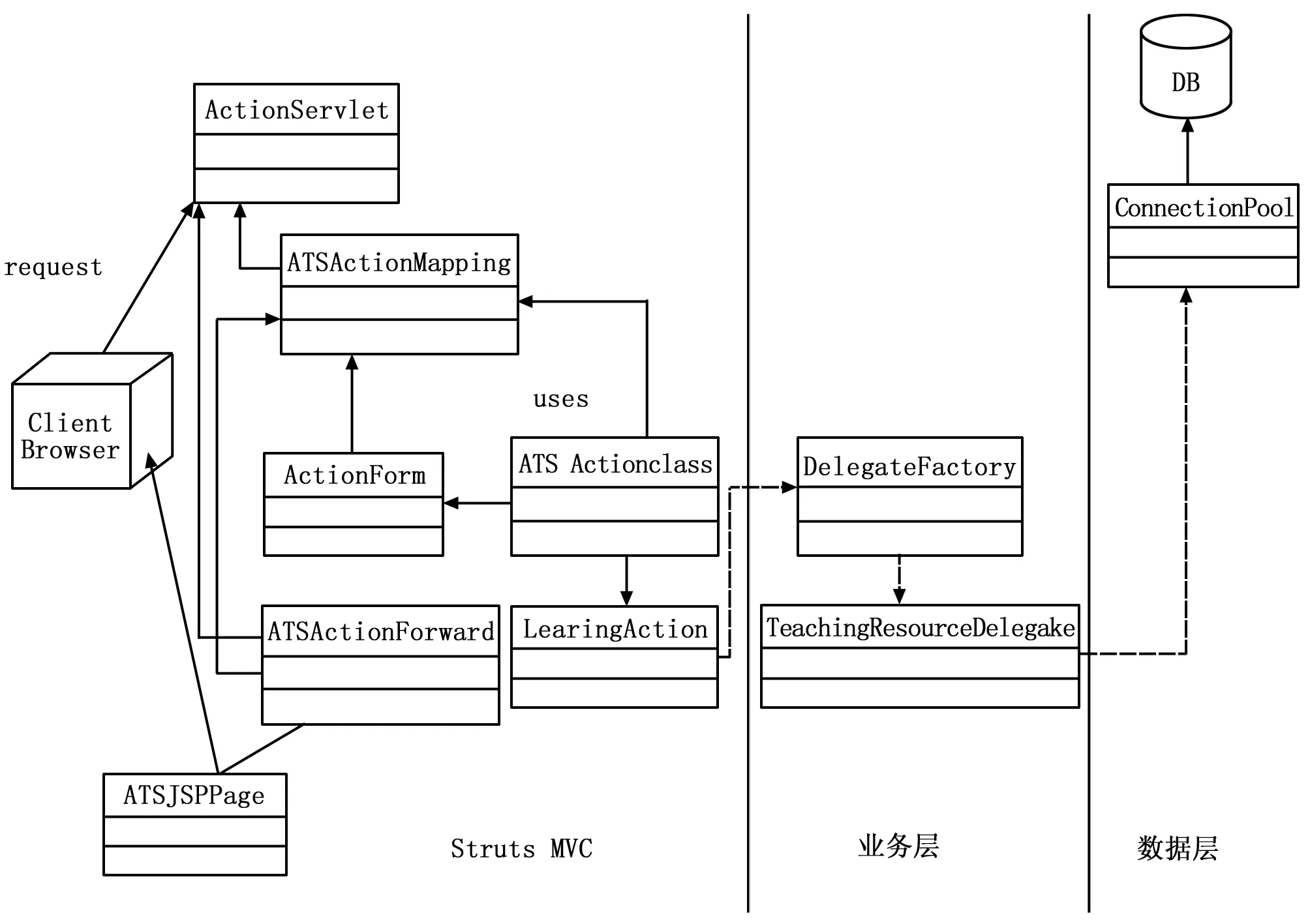
图3 基于SOE的目标跟踪框图
3.1 跟踪器
当然,在进行跟踪过程中最重要的就是跟踪器的掌握,并且在计算目标跟踪整体数据之前也需要对其进行问题的优化与处理[10],其中最常用的是:

▽/(x,y))Tu(x,y;a)+
式中,数据主要是为了更加明确地表示各种尺寸的数字,并且其中的M=(0,1)主要是为了更明确的表示出遮挡掩膜的变化,是一种尺寸的数据表示,并且在计算期间需要我们对其进行明确地掌握与解释,其中的函数计算可以表示为:
在这其中数据表示的主要是计算出的函数数字,并且在I(x,y,t)的展示中将时间定格在t像素标准点上面,并且(x,y)的计算值属于跟踪计算中的亮度值,并且计算的方式为:
▽
同时,式中的u(x,y;a)代表的主要是在固定量a的基础上向跟踪目标进行模拟计算,同时在虚拟的数量目标基础上将其中的运动点进行提前,这样就能很好地保证计算的数量的准确性,利用经常使用的一种数量模式u(x,y;a)=(a0,a1)T的形式进行目标的计算与掌握。在计算过程中我们经常使用这种计算形似对其进行计算,并且采用相关的梯度下降的形式对其进行解释,这是解决期间出现问题最好的方式之一,同时也是最准确的一种计算方式。是现在跟踪目标计算过程中使用最广泛的一种形式[11]。
3.2 运动模型的计算与掌握
根据上文中的讲述我们可以很好地掌握其中的目标运动平均值计算,并且准确的将SOE的计算目标进行提取,准确的建立模拟形态。尤其是在进行(ER,EL)这种反方向计算过程中对于能量的提取。与此同时也可以在不同能量增加期间计算出其他能量的下降值。所以在进行计算定义期间文章将其中的像素描述点与计算点进行了平衡,使其处于一种垂直的状态中。
在计算的过程中因为其中的E0主要是反应的是静态的量,对于动态中的量掌握的并不是非常准确,所以文章中将其中的{ES,EH,EV}等计算数据进行详细的陈列,并且将其称之为固定的具有规律性的运动指标,在计算期间将采用比较复杂的计算方式进行计算,并且构建的模型为:
{SS(μS,σS);SH(μH,σH);SV(μV,σV)}
陈列图如图4所示。
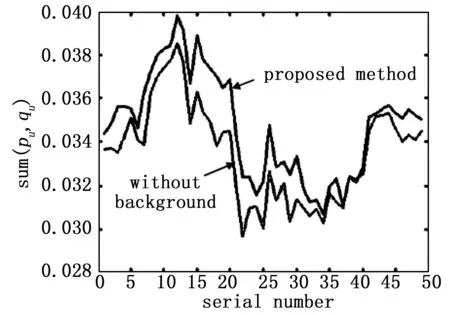
图4 陈列图
其中的数据现象表现如图5所示。

图5 数据现象表现实图
3.3 跟踪目标的具体状态监测
对于跟踪目标的监督检测中主要的状态包括:无遮挡的动态与静止状态、遮挡部分的动摇与全部遮挡的动态。当然为了能够更好的将其进行检测与计算,文章会采用详细的具体的使用状态进行计算与核实,保证实施跟踪期间的准确性。
4 结束语
综上所述,文章主要针对现在的跟踪技术中SOE检测模式进行详细的分析与探索,利用这些先进的科学技术进行解决其中出现的遮挡部分以及全部遮挡部分的计算与分析。其中主要的设计方法时对无遮挡部分的分析与计算以及对于遮挡部分的分析与计算。自适应的背景下的目标跟踪计算方式将其中的科学技术不断进行升级与改善,并且在全部更新的技术上进行了强化。结合当前的社会科学发展技术对其进行更好的甄别,不仅保证了其中的技术分析以及在跟踪计算中对于定量的掌握分析,将其中的目标跟踪图形与模拟进行详细的计算与核实。保证跟踪调查技术整体发展的进步与创新。
[1] 郇二洋,李 睿. 基于自适应特征融合的粒子滤波目标跟踪算法[J]. 计算机科学,2015(2):316-319.
[2] 夏天维,侯 翔. 基于自适应Kalman滤波的机器人运动目标跟踪算法[J]. 计算机测量与控制,2015(1):173-175.
[3] 刘明华,汪传生,王宪伦. 基于多特征自适应融合的均值迁移目标跟踪算法[J]. 光电子·激光,2015(8):1583-1592.
[4] 刘 皞,赵峰民,陈望达. 一种基于背景自适应的运动目标检测与跟踪算法[J]. 海军航空工程学院学报,2012(1):15-18.
[5] 张立朝,毕笃彦,查宇飞,等. 动态特征和静态特征自适应融合的目标跟踪算法[J]. 西安电子科技大学学报,2015(6):164-172.
[6] 刘振兴,范新南,李 敏. 融合SURF特征的改进自适应分块目标跟踪算法[J]. 计算机工程与设计,2016(2):454-459.
[7] 李 睿,刘昌旭,年福忠. 基于自适应背景的多特征融合目标跟踪[J]. 计算机应用,2013(3):651-655.
[8] 陈 刚,杨 勇. 一种自适应基于纹理和颜色特征的目标跟踪算法[J]. 智能计算机与应用,2013(2):54-57.
[9]DerpanisKG,WildesRP.Dynamictexturerecognitionbasedondistributionsofspacetimeorientedstructure[A].IEEEConferenceonComputerVision&PatternRecognition[C]. 2010, 23(3):191-198.
[10]BlackMJ.TheRobustEstimationofMultipleMotions:ParametricandPiecewise-SmoothFlowFields[J].ComputerVision&ImageUnderstanding, 1996, 63(1):75-104.
[11]FührG,JungCR.Combiningpatchmatchinganddetectionforrobustpedestriantrackinginmonocularcalibratedcameras[J].PatternRecognitionLetters, 2014, 39(4):11-20.
Research on Target Tracking Algorithm Based on Adaptive Background
Wu Xianping1, Shen Liangzhong2
(1.Zhejiang College of Security Technology, Wenzhou 325016, China;2.Wenzhou University, Wenzhou 325035, China)
With the social development and economic progress, China’s rapid development of science and technology, especially in terms of technical monitoring is a rapid development. In order to reduce the impact of the target occlusion, the target tracking algorithm is proposed based on the adaptive technology development in this area, which is used to improve the supervision and control technology of our country. This calculation is based on the identification and tracking of the first appearance of the basic observation of targets, will exercise its own for the average; second is calculated according to the running direction of the space target tracking and characteristics, to establish a complete model of the whole operation, according to the motion model and the whole state detection and control of the supervision of the target, this period will form an occlusion mask. The mask is a program data mapping into light rigid, very reliable in the program during use, and the manufacturing cost is relatively low, easy to use; the last is used in different situations with different parameters were collected, to adapt to the motion model of automatic operation. According to this calculation experiment is the use of two kinds of CAVIAR, York data is often used in the international test, and according to these two kinds of data to test the accuracy and multiple target tracking evaluation, the overall performance of detection and tracking. Through a number of research shows that this way of tracking performance is very good, and it can be very good to keep track of the robustness of the target.
adaptive background; target tracking method; motion model
2016-11-15;
2016-12-09。
2013年浙江省自然科学基金资助项目(LY13F010007);2016年温州市科技计划项目(G20160029)。
吴贤平(1978-),男, 浙江永嘉人,硕士,高级工程师,主要从事计算机应用技术方向的研究。
1671-4598(2017)04-0209-04
10.16526/j.cnki.11-4762/tp.2017.04.057
10.3969
A