高效率永磁同步电机及其在车载空调中的应用研究
2017-05-09谢荣义
谢荣义
(江苏科技大学 电子信息学院,江苏 镇江212003)
高效率永磁同步电机及其在车载空调中的应用研究
谢荣义
(江苏科技大学 电子信息学院,江苏 镇江212003)
电动汽车用永磁同步电机能量来源为蓄电池,对效率要求较高。永磁同步电机因制造技术与实际工作环境因素等,其反电动势很难保证理想的正弦波形。本文针对永磁同步电机高效率的特点作进一步分析研究,在永磁同步电机成熟控制技术矢量控制与电流跟踪控制技术前提下引入针对非正弦反电动势的电流谐波注入法,通过谐波注入的方法来改变永磁同步电机的驱动电流来适应非正弦反电动势,减小转矩脉动,从而减少不必要的能量损耗,提高永磁同步电机的效率。
永磁同步电机;矢量控制;谐波注入;高效率;转矩脉动
永磁同步电机比同功率的其他交流电机体积小且重量轻,加之其结构简单可以灵活进行控制,效率较高,比较适合应用在电动汽车驱动系统中,很多汽车厂商、高校、研究所等都在对电动汽车用永磁同步电机驱动系统进行研究开发[1]。通常我们采用的矢量控制或直接转矩控制电机调速系统的性能能够满足基本需求,但这些控制系统的效率仍有提升空间,在电动汽车中,是用有限能量的电池进行供电的,所以其电机驱动系统的效率就变得非常重要,因而提高电机驱动系统效率对电动汽车的发展具有重要的现实意义[2]。由于制作工艺与实际应用环境的约束,使得永磁同步电机[3]的反电动势呈现非正弦波形,这就造成了在输入正弦波形三相驱动电压的情况下会产生相应的转矩脉动[4],使得输入能量以噪声、转速波动等形式散失。针对转矩脉动的能量散失,从反电动势入手,在矢量控制与电流跟随控制技术的基础上采用谐波注入的方式改变PMSM的三相驱动电流以适应非正弦反电动势[5],减小转矩脉动[6]引起的噪声与能量损失,提高效率,达到节能的目的[7]。
1 电动汽车空调系统
如图1所示,电动汽车空调压缩机系统主要由压缩机、蒸发器、膨胀阀、冷凝器4个重要部分组成,它们构成一个循环回路[8]。压缩机由直流动力电源供电,控制面板由单独的12 V直流电源供电。电动汽车空调相比于传统空调系统具有诸多优点。纯电动压缩机空调系统可以采用全封闭的HFC134a(目前主要汽车空调用制冷剂)系统及制冷剂回收技术,整体的高度密封性可以减小正常运行以及修理维护时制冷剂的泄漏损失,从而减少了对环境的污染。压缩机采用电机、变频驱动器与压缩机一体式结构,采用自身冷却的方式进行散热,不需要外部散热设备,省去散热能耗。以上诸多优点使得永磁同步电机压缩机控制简单、体积缩小、效率提高[9]。
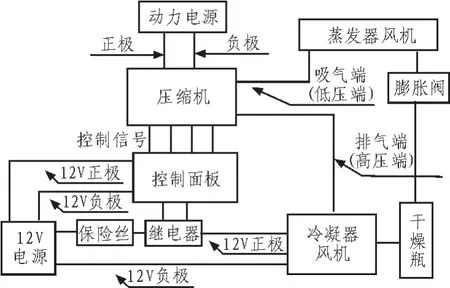
图1 电动汽车车载空调系统框图
2 PMSM矢量控制
2.1 坐标变换
由于电机定转子之间存在相对运动,定转子之间的位置关系是随时间变化的,因此,定转子各参量的电磁耦合关系十分复杂,为了简化分析,建立可行的数学模型[10],作如下假设:
1)忽略磁路饱和、磁滞和涡流影响。
2)PMSM的定子绕组三相对称,空间上互差120°。
3)转子上没有阻尼绕组,永磁体没有阻尼作用。
4)PMSM定子电势按照正弦规律变化,忽略磁场场路中的高次谐波磁势。

图2 永磁同步电机三相模型
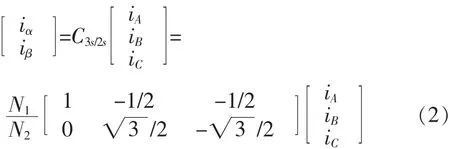
如图2,设磁动势波形时按正弦分布的,当三相总磁动势与两相总磁动势相等时,三相绕组磁动势在α、β轴上的投影应与两相绕组磁动势在α、β轴上的投影相等,并且各相磁动势和有效匝数与电流乘积成正比[11],所以可得:

其中,N1、N2分别表示三相电动机和两相电动机定子每相绕组的有效匝数.由上式可得:

由上图可知,dq轴与空间电流矢量Is都以同步电角频率ωs旋转,dq分量Isd、Isq的大小不变,可看做dq轴绕组恒定的直流磁动势。由于αβ轴是相对静止的,而dq轴是旋转的,所以α轴与d轴的夹角φ会随时间及d轴的旋转而不断变化,因此空间电流矢量Is在α、β轴上的分量Isα、Isβ的大小也会随时间而变化,相当于αβ轴绕组的交流磁动势的瞬时值。由图可知,Isα、Isβ和Isd、Isq存在如式(4)所示的关系:

写成矩阵形式如下:

式(5)为两相旋转坐标系变换到两相静止坐标系的变换矩阵。
两边均左乘变换矩阵的逆矩阵,可得到两相静止坐标系到两相旋转坐标系的变换,即Park变换为:

2.2 电流跟踪PWM(CFPWM)控制技术
在矢量控制原有的主回路基础上,采用电流闭环控制,使实际电流快速跟定给定值,在应用器件开关频率允许的前提下,尽量选择小的滞环宽度,以实现精度高、响应快的控制效果。如图3所示为电流跟踪PWM(Current Follow PWM,CFPWM)控制技术。其中,i*A为给定电流,iA为反馈采样电流,±Ud/2为给定电压值,VT1、VT4为IGBT,VD1、VD2为续流二极管,HBC为滞环控制器,其环宽为2h。以给定电流为正弦波为例,当iA<i*A,且ΔiA=i*A-iA≥h,滞环控制器输出正电平,VT1导通,此时输出电压为正,iA持续增大。直至iA=i*A+h,ΔiA=-h滞环翻转,HBC输出低电平,VT1管关断,并经延时后启动VT4。但由于负载为感性负载,电流iA不会突变,二极管VD4续流,使VT4反向钳制而不能导通,输出电压为负,iA持续减小。当ΔiA=i*A-iA≥h后,滞环控制器输出又变为正电平,VT1管再次导通,如此VT1与VD4交替导通工作,使输出电流iA快速跟随给定值i*A,两者的偏差始终保持在±h范围内。负半波的工作原理与正半波相同,只是VT4与VD1交替工作[12]。给定电流i*A的波形与输出电流iA的波形如图4所示。
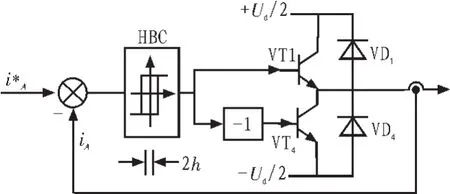
图3 电流跟踪PWM控制技术原理图
图4 给定电流 i*A波形及输出电流 iA波形
3 谐波电流注入
永磁同步电机的性能取决于定子绕组中的感应电动势,而感应电动势的幅值与波形主要是由气隙中的磁密决定的。在理想情况下,假设永磁体之间紧密排列(即极弧系数为1的情况),可以满足空气气隙的磁密呈正弦状分布。但是大多的永磁体形状都比较复杂,加工比较困难,加之国内生产厂家对价格比较敏感,加工成本达不到要求,致使永磁同步电机实际情况下很难保证完美的正弦波形反电动势。
对于PMSM有如下公式:

式中Te为电磁转矩,ω为转速,ia、ib、ic为三相电流,ea、eb、ec为三相反电动势。
由式(1),假设电机稳定工作在恒定转速(ω不变)与恒定负载(ia、ib、ic不变)的情况下,如果反电动势ea、eb、ec非正弦存在波动,则会使得Te产生相应的波动,并产生噪声,损失能量。
由交流电机旋转磁场理论[13],三相永磁同步电机的基波磁链与转子做同步旋转,5次谐波磁链与基波旋转方向相反,旋转速度为-5ω;7次磁链的旋转方向与基波方向相同,速度为7ω;5次和7次谐波磁链产生的反电势谐波都会导致永磁同步电机电磁转矩产生6次脉动。经分析可得谐波幅值较大的主要成分为5次谐波与7次谐波,其余阶次谐波[14]影响可近似忽略。文中将针对影响较大的5次、7次谐波进行分析、处理。
以相电流Ia为例,其五次谐波模型如下:

由clark变换可得
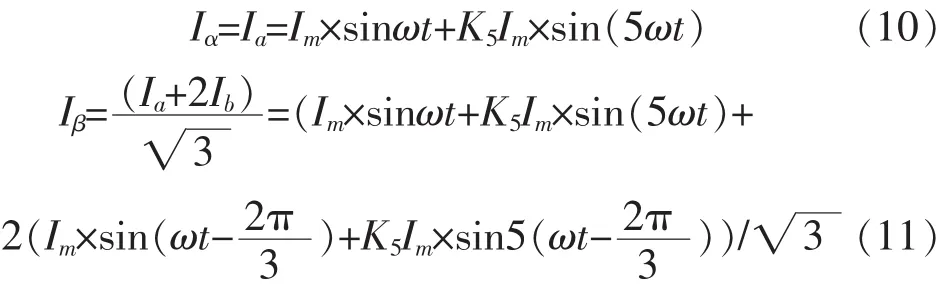
由park变换可得

其七次谐波模型如下:

由clark变换可得
由park变换可得

综上:

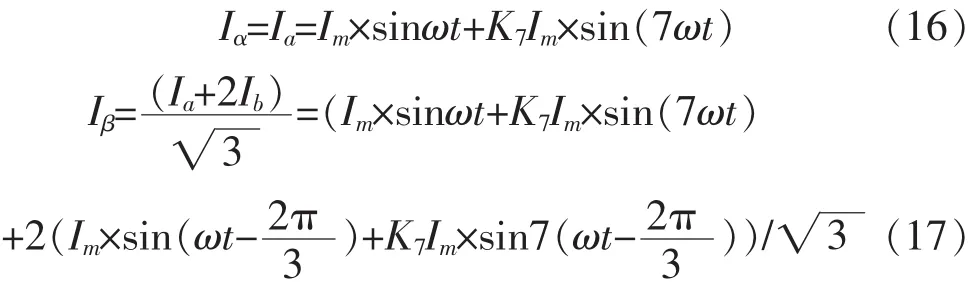
由以上推导可知,为了抑制因反电动势而产生的五次、七次谐波,只需对永磁同步电机的三相驱动电流进行相应的谐波注入即可。谐波注入算法原理框图如图5所示。
4 实验研究
针对上述方法,采用以STM32F103C6T6为控制核心的驱动器来驱动永磁同步电机系统[15],整个实验系统由直流稳压电源、驱动器、永磁同步电机及磁滞测功机组成。实验电机为永磁同步电机,电机参数为:额定功率P=1 kW;电子电阻Rs=0.65 Ω;d轴电感Ld=4.3 mH;q轴电感Lq=2.7 mH;永磁体磁链ψf= 0.036 Wb;极对数为3;直流母线电压UDC=312 V,磁滞测功机转矩设置为 0.8 NM。功率器件采用Infineon公司的三相IGBT逆变桥。实验结果如下:
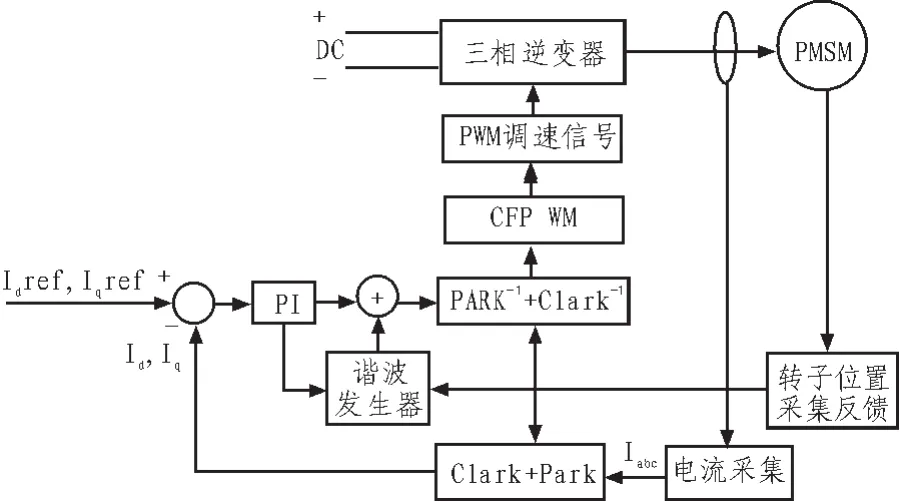
图5 谐波注入算法原理框图

图6 加入谐波电流前相电流波形
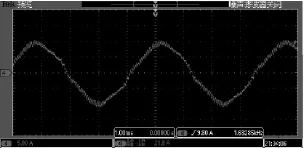
图7 加入谐波电流后相电流波形
图6中显示在加入谐波电流之前三相电流转矩脉动较大,在加入谐波电流之后,如图7所示,电流波形得到明显改善。图8为电流跟踪PWM技术条件下三相电流波形,图中可以清晰的看出电流的微小振荡并以给定电流轨迹跟踪运行。
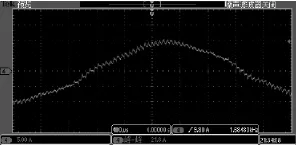
图8 电流跟踪PWM技术电流波形

图9 采用控制算法前后PMSM效率对比

表1 采用谐波注入算法前压缩机性能参数

表2 采用谐波注入算法后压缩机性能参数
图9为用磁滞测功机测试的负载转矩为0.8NM、电机转速为4 500 rpm的采用控制算法注入算法前后的效率对比曲线。图中可以看出在30~55 s之间电机稳定运转在4 500 rpm,此时效率相差大概3个百分点。采用上述控制算法后永磁同步电机的效率得到提升。
压缩机性能测试台能够模拟真实情况下压缩机的工作状态,采用性能测试台对压缩机整体性能进行测试,实验结果如下:
采用上述控制算法前测试稳定工作状态下压缩机制冷量与压缩机输入功率如表1所示。
未采用上述控制算法时,能效比=制冷量/输入功率=2.526/1.619=1.560 22;采用上述控制算法后测试稳定工作状态下压缩机制冷量与压缩机输入功率如表2所示。
采用上述控制算法后,则能效比=制冷量/输入功率=2.506/1.555=1.611 57;(1.611 57-1.560 22)/ 1.560 22×100%≈3%;忽略系统误差、仪器设备误差等影响,其测试结果与电机测试结果相吻合。
5 结 论
文中运用电流滞环跟踪控制技术与谐波注入的方法对永磁同步电机非正弦反电动势导致的转矩脉动进行补偿,改善永磁同步电机效率,提高压缩机整体能效比。
[1]S.Hwan Hwang,J.Mok Kim.Dead Time Compensation Method for Voltage-Fed PWM Inverter [J].IEEE Transactions on Energy Conversion,2010,25(1):1-10.
[2]梁艳,李永东.无传感器永磁同步电机矢量控制系统概述[J].电气传动,2003(4):4-9.
[3]汤蕴璆,罗应立,梁艳萍.电机学[M].北京:机械工业出版社,2010.
[4]乔伟,郑恩让.基于ILC&EK的PMSM转矩脉动最小化方法的仿真研究[J].化工自动化及仪表,2010,37(10):80-83.
[5]S.Young Kim,S.Yub Park.Compensation of Dead-Time Effects Based on Adaptive Harmonic Filtering in the Vector-Controlled AC Motor Drives [J].IEEE Transactions on Industrial Electronics,2007,54(3):1768-1777.
[6]乔伟,郑恩让.基于ILC&EK的PMSM转矩脉动最小化方法的仿真研究[J].化工自动化及仪表,2010,37(10):80-83.
[7]HLee,S Kang,S Sul.Efficiency-optimized direct torque control of synchronous reluctance motor using feedback linearization[J].IEEE Trans.on Industry Electronics,2009,46(1):192-198.
[8]杨康,魏海峰,顾凯.电动汽车空调压缩机用永磁同步电机变频控制系统 [J].电机与控制应用. 2014,41(1):33-36.
[9]吴春华,陈国呈,孙承波.基于滑模观测器的无传感器永磁同步电机矢量控制系统[J].电工电能新技术,2006,25(2):1-3.
[10]Raggl K,Warberger B,Nussbaumer T,et al.Robust angle-sensorless control of a PMSM bearingless pump [J].IEEE Transactions on Industrial Electronics,2009,56(6):2067-2085.
[11]徐心怡.基于扩展滑膜控制器的PMSM无速度传感器探究[J].电子测试,2015,5(6):4-5.
[12]王永杰,陈伟华.基于电流滞环跟踪型PWM逆变器的异步电动机间接矢量控制[J].电机与控制应用,2013,40(3):37-38.
[13]廖勇,甄帅,刘刃,等.用谐波注入抑制永磁同步电机转矩脉动 [J].中国电机工程学报,2011,31(21):120-122.
[14]Petrovic V,Ortega R,Stankovic A.M.Designand implementation of an adaptive controller for torque ripple minimization in PM synchronous motors[J]. IEEE Transactions on Power Electronics,2000,15(5):871-880.
[15]盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统效率优化智能集成控制研究[J].中南大学学报:自然科学版,2012,41(6):2252-2257.
High efficiency permanent magnet synchronous motor and its application in automotive air conditioning
XIE Rong-yi
(Electronic Information Institute,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
The energy source of the permanent magnet synchronous motor for electric is the storage battery,which requires high efficiency.Due to manufacturing technology and the actual working environment,it is difficult to guarantee the ideal sine wave of PMSM back electromotive force.Further analysis will be made with high efficiency of permanent magnet synchronous motor.A method of harmonic current injection for non sinusoidal back EMF is introduced,which based on the permanent magnet synchronous motor mature control technology of vector control and current follow control technology.Using the method of harmonic injection to change the driving current of permanent magnet synchronous motor to adapt to the non sinusoidal back EMF,reduced torque ripple,so as to reduce unnecessary energy loss and improve the efficiency of permanent magnet synchronous motor.
PMSM;vector control;harmonic injection;high efficiency;torque ripple
TN801
:A
:1674-6236(2017)01-0123-05
2016-01-08稿件编号:201601146
谢荣义(1990—),男,江苏徐州人,硕士。研究方向:电机控制。