基于滑模观测器的电动汽车用感应电机驱动控制
2017-05-04马文华刘欣彤刘海波王建强
马文华,刘欣彤,刘海波,王建强
(河北水利电力学院,沧州061001)
0 引 言
纯电动汽车(以下简称EV)是仅由电能进行驱动的,而电能一般存储在电池、超级电容器等设备中[1-6]。在EV中,电动机将电能转换成机械能以实现电力传动,由于EV中的电力传动系统需考虑不同路况差异和其他一些限制,存在和其他电力传动系统不同的特殊设计要求,如低速时高转矩输出、较宽速度范围内的高效率运行等[7-10]。通常,基于高性能感应电机(以下简称IM)的传动系统是一个中低成本EV的最佳选择[11-13]。
针对传统基于磁场定向的IM驱动控制器存在的一些诸如暂态响应慢和效率不高等问题,文献[14]提出了一种基于模糊神经网络的新型IM驱动控制策略;文献[15]设计了一种结合模糊神经网络观测器和滑模控制器的IM驱动系统,较传统控制器的鲁棒性得到了较大的提高;文献[16]提出了一种结合人工智能的IM直接转矩控制器,以提高系统响应。但上述文献的研究中,存在过拟合和计算量较大的问题,不利于实际工程。另一方面,无速度传感器IM驱动控制能消除速度传感器,降低了成本和系统复杂度,得到了广泛研究[17-18]。在无速度传感器IM驱动系统中,通常使用速度观测器进行速度估计,文献[19]和[20]中使用了一种基于模型参考自适应的速度观测器,但都假定已经转子磁链或负载转矩,此外,在低速时,估计转速和实际转速差别较大。
本文基于前述文献研究,提出了一种用于电动汽车的基于滑模观测器的IM无速度传感器驱动控制策略,控制器结合使用了间接矢量控制与固定边界层滑模观测器(以下简称 FBLSMO),其中FBLSMO负责估计转速和转子磁通,即使在未知负载转矩的条件下,依然能工作,且在低速工况下较传统速度观测器精度更高。同时使用了间接矢量控制以及前馈补偿,从而计算简单,并有较好的暂态性能。最后搭建了IM驱动试验平台开展了相关试验,对新型控制策略的有效性进行了验证。
1 电动汽车电力传动系统结构
图1为典型的EV中的电力传动系统的结构示意图。从图中可以看出,系统中包括了电池组(包括充电器)、DC/DC直流变换器、IM和变频器,其中变频器的输入为直流,输出交流直接到IM,而箭头代表了能量流动的方向。系统中的电池由充电器充电,变频器则将电池中电能根据需要变换给电动机,以控制车辆的速度和运动方向。可以注意到,在制动过程中,电池可以被反向充电,从而提高了系统效率。DC/DC直流变换器是可选组件,当电池组电压和变频器输出电压匹配时,该变换器可以取消。电机不直接驱动车轮,存在机械传动结构,但考虑到与本文研究内容无关,故只将其当成电机的负载。
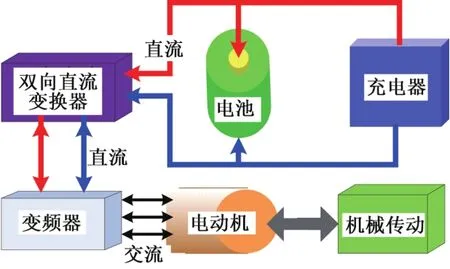
图1 典型EV电力传动系统结构
2 感应电机模型
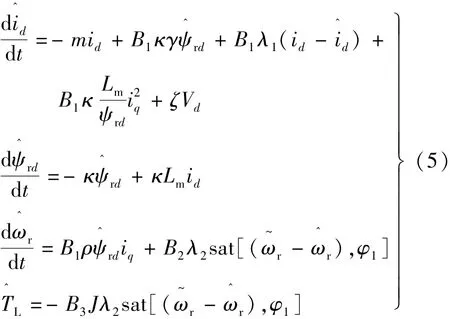
在d-q旋转坐标系下的IM数学模型[12]:
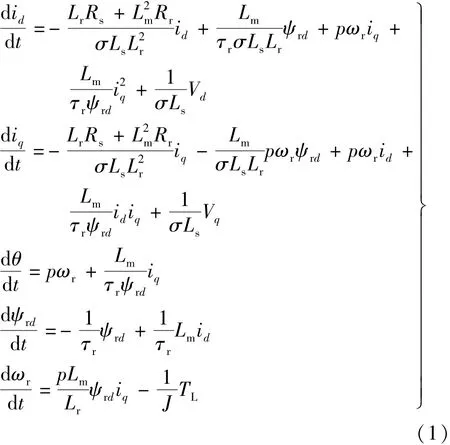
式中:id和iq,Vd和Vq分别为d,q轴定子电流和电压;p,ωr,Lm,TL,J,ψrd和 θ分别为极对数、转速、激磁电感、负载转矩、转动惯量、d轴转子磁链和磁链角;Ls和Lr为定子和转子电感;Rs和Rr为定子和转子电阻;其他相关参数:转子时间常数τr=Lr/Rr,漏磁系数 σ=1-L/LsLr。 为了简化,令 m=(LrRs+LRr)/σLsL,γ=Lm/σLsLr,ζ=1/σLs,κ=1/τr和 ρ=pLm/Lr,进而式(1)可重写:

3 固定边界层滑模观测器设计
新型控制器仅对电机的三相定子电流进行了测量,测量得到三相定子电流ia,ib和ic后,进行d-q旋转坐标变换,得到d轴和q轴定子电流分量id和:
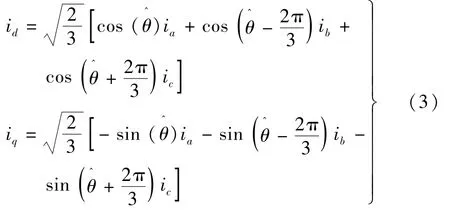
式中:为估计的磁链角,从式(2)中得到的 和转子转速的关系:
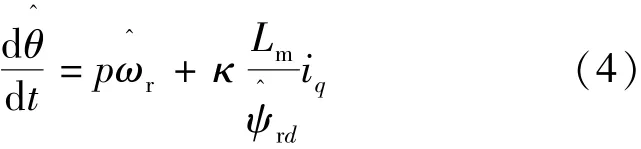
假设式(2)描述的系统有输出[y1,y2]T=[id,iq]T,可以注意到系统中ψrd是不可观的。根据文献[21],当y1=id且 κ>0时,式(2)中 ψrd具有稳定的零动态,因此可以设计FBLSMO估计ψrd,进而得到ωr。其中观测器所需的d,q轴电压是从输出电压前馈补偿得到的,这将在下一节进行叙述,具体的FBLSMO描述如下:

系数B1,B2和B3具体如下:
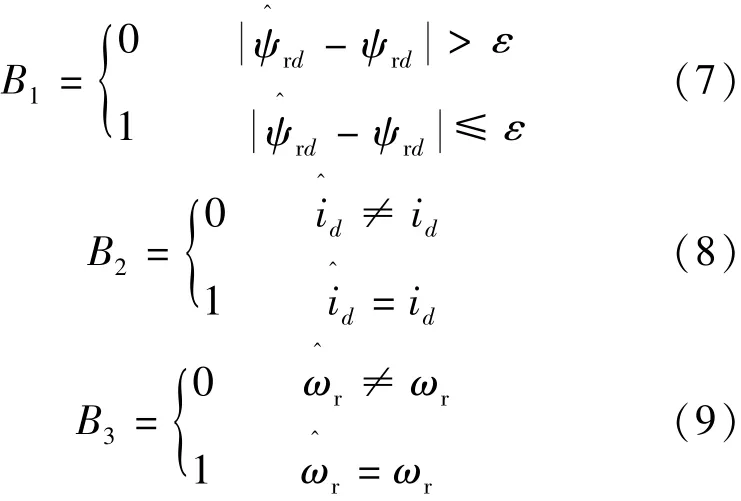
式中:ε为一个小值,代表了限定范围。接下来,对滑模观测器的指数收敛性进行证明。假设ψrd的观测误差为 e1=ψrd-,且超过了ε,则B1=0,并有de1/dt=-κe1(κ>0)。设计李亚普洛夫函数为Ve1=1/2e,求导有 dVe1/dt=-κe<-κε2<0。 因此证明了是指数收敛到ψrd的。因此,对于一个足够小的ε>0,总是可以找到时刻 t1,当t>t1,满足e1≤ε,此时B1=1。 然后定义e2=id-,当t>t1时,能导出如下方程:
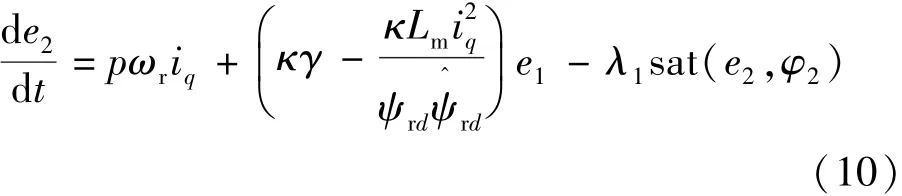
为了证明是收敛到id的,设计李亚普洛夫函数为Ve2=1/2e。设置λ1:

对李亚普洛夫函数求导可以得到:
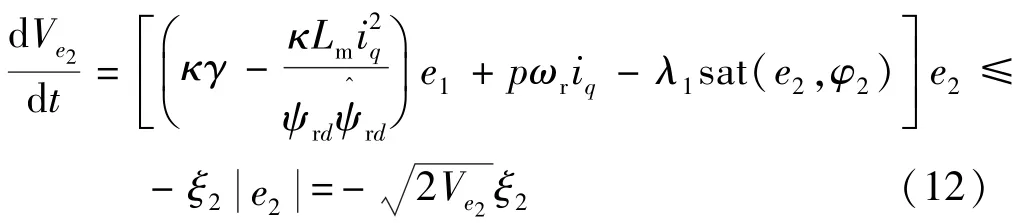
因此,将在有限时间t2内收敛到id,当t>t2,有B2=1和de2/dt=e2=0,根据式(10),可以得到新的方程:


转子磁链收敛将导致E和dE/dt指数收敛至


式中:ξ3>0,进一步可以得到以下方程:


4 间接矢量控制器设计
图2为新型控制系统的框图。从图中可以看出,系统有两种控制模式,可工作在转速或转矩控制模式。在转速控制模式时,转矩前馈内嵌到电机电磁转矩的计算中,其中T*和ΔT分别代表了前馈输出和转矩补偿。在转矩控制模式,控制器的转矩参考为Tref,最终的转矩指令为Tcmd。图中虚线框内为间接矢量控制计算过程,计算后输出q轴电流参考iqref,而d轴电流参考idref是由磁链PI计算输出的,而iqref和idref将送入电流环PI调节器,电流环计算结果加上电压前馈得到参考电压Vd和Vq,经过反旋转坐标变换后经由空间矢量脉宽调制(以下简称SVPWM)模块用于生成最后的PWM脉冲。其中FBLSMO的输入为Vd和Vq,以及测量得到的id和iq,输出,和。

图2 新型控制系统框图
4.1 间接矢量控制
IM的动态数学模型还可以描述为矩阵形式:

式中:j为虚部符号;is和ir为定子和转子电流;V为定子电压;ωr和ωs1分别是转速和滑差转速。
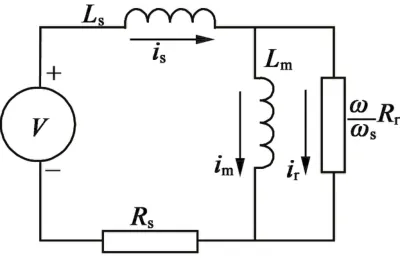
图3 IM等效电路
从图3和式(19)中可以看出,定子电流是激磁电流和转子电流之和,具体:

同时,基于图3和式(19),可以得到电磁功率P由机械功率Pm和铜损pr构成,具体如下:

电磁转矩T与转子电流ir和滑差转速ωs1的关系式:

参照图3,转矩T还可以写:

因此,滑差转速ωs1和电磁转矩T的关系式:

测量定子三相电流后通过dq旋转坐标变换,可以得到d,q轴电流id和iq,写成复变形式为is=id+jiq。根据磁场定向(以下简称FOC)原理,激磁电流完全由d轴电流id提供,即im=id,同时有:

进一步滑差转速:

一般假设id为零,但考虑到id突变时,磁场不会马上变化,因此需要选择合适的iq不同于式(25)的计算结果以应对气隙磁链的变化,定义以时间常数Lm/Rr变化的in,具体如下:

从而q轴电流被改写:

然后,滑差转速新的表达式:

最后的间接矢量控制器如图4所示。
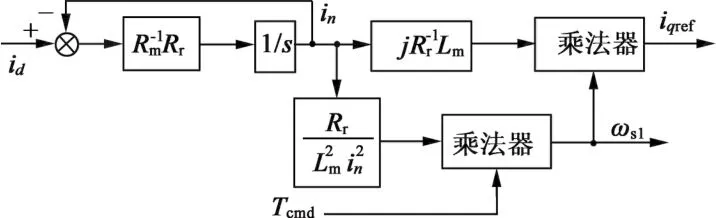
图4 间接矢量控制器结构
4.2 转矩和电压前馈补偿
为了提高IM驱动系统的暂态性能,新型控制器中嵌入了转矩前馈,具体表达式如下:


式中:Kp和Ki分别为比例和积分增益。PI调节器引入的目的是为了提高转速跟踪精度和保证最终静态误差为零。在FOC控制方案中,电流闭环调节的目的是通过计算得到期望的定子电压。在本文中,所需的电压由电流闭环调节和输出电压前馈共同得到,其中电流闭环调节也采用PI实现。将is=id+jiq和ir=jiq代入式(19)可得到:

假设Vd是定子电压的实部,Vq是虚部,则Vd和Vq具体如下:
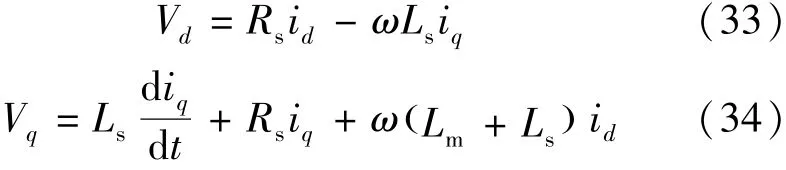
式(34)中,Ls(diq/dt)是不能忽略的,它在动态过程中有较大值。当制动过程开始时,电流需要快速改变,Ls(diq/dt)有利于加快动态响应。
5 试验验证
为了验证新型控制策略的性能,搭建了基于IM的对拖试验平台,并开展了相关试验。图5为试验平台构成,从图中可以看出,两台IM同轴联接,具体的电机参数如表1所示,同时为了方便试验和安全考虑,将可调直流电源代替电池组给变频器供电。控制算法采用TI公司的DSP芯片作为载体,具体型号为TMS320F28335,其含有多路采样通道,并能输出PWM信号。整个试验系统不含有电压或转速传感器,仅使用了电流传感器对电机定子的A相和B相电流进行测量(C相计算得到)。试验中分别对负载电机和驱动电机设置成转速和转矩控制模式,而工控机,即主机通过CAN通讯给DSP发送转矩和转速指令,同时主机还控制可调直流源进行直流电压稳压和过流保护。FBLSMO的参数设置为:λ1=950,λ2=765和φ1=5.85。 PI调节器的参数设置:KPω=1.74,KIω=0.04,KPψd=24.5,KIψd=3.8,KPVd=3.5,KIVd=0.09,KPVq=3.5和 KIVq=0.09。
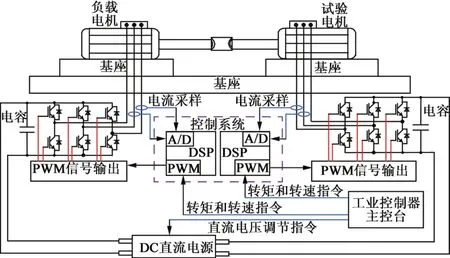
图5 试验平台构成
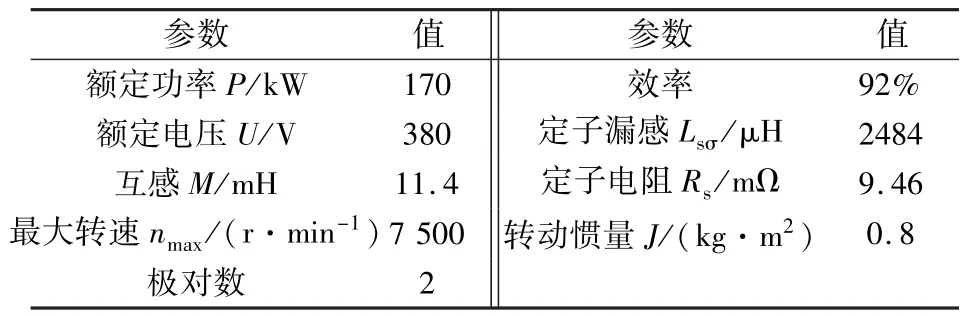
表1 试验用IM额定参数
为了验证所设计滑模观测器的精度,安装了转速编码器进行转速测量。首先控制电机在恒定转矩为50 N·m时进行转速和转子磁链估计试验,试验结果如图6所示。为了验证观测器的鲁棒性,分别将设置了200%定子电阻、200%定子电感和50%转矩的参数扰动,从试验结果来看,即使在参数扰动下,估计的转速和磁链都能够很好地跟踪实际转速和磁链,故FBLSMO的性能得到了验证。
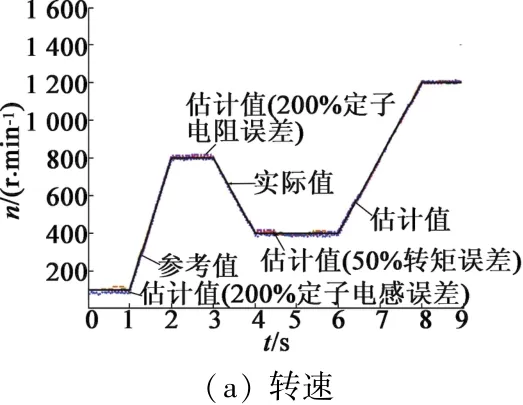
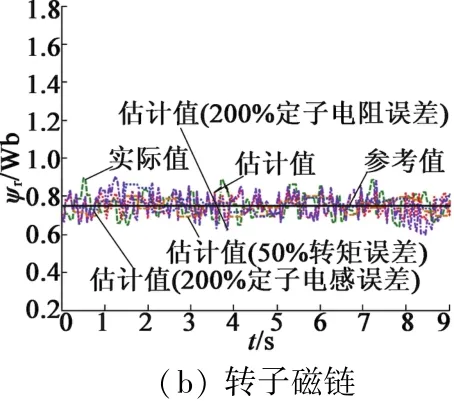
图6 试验中FBLSMO的估计值和参考值比较
值得注意的是,电机时间常数的变化可能会影响磁链估计和进一步的试验结果,但是新型FBLSMO观测器并不高度依赖电机参数,鲁棒性很好,因此电机参数的变化导致电机时间常数变化并不能显著影响控制器。试验中对应的定子d,q轴电压和电流如图7和图8所示,从图中可看出,当电机加速时,d轴电压存在一个下降斜坡,同样电机减速时存在一个上升斜坡,这加快了动态响应。
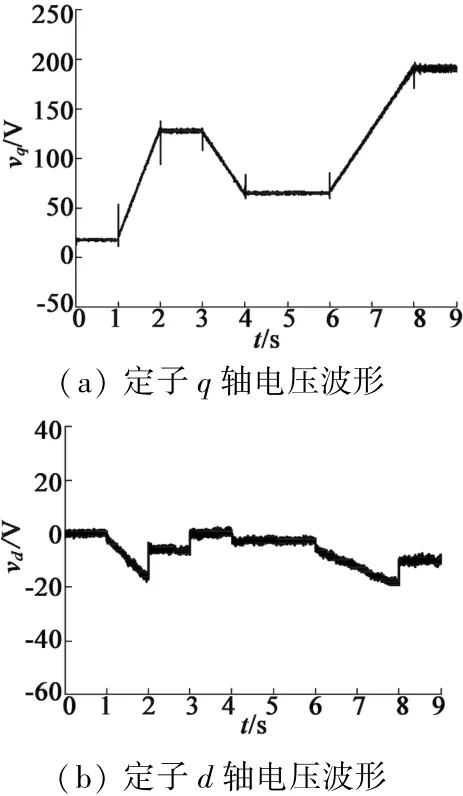
图7 试验中定子d,q轴电压波形
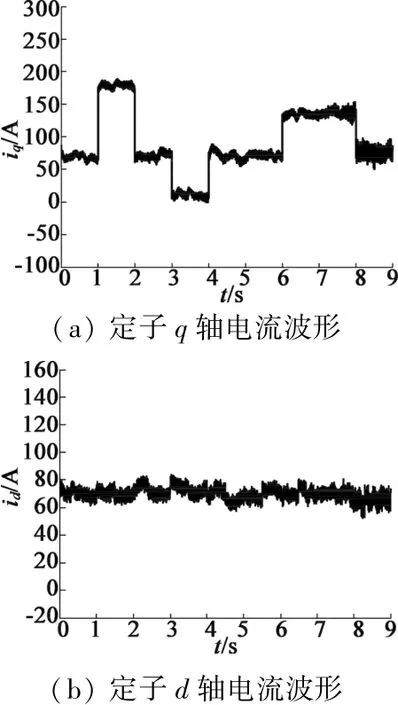
图8 试验中定子d,q轴电流波形
为了进一步验证控制策略对EV的适用性,采用了转速指令循环曲线如图9所示[10]。在循环试验中,负载电机转速波形和驱动电机转矩波形如图10所示。从图中可以看出,即使在低转速时,在新型控制策略作用下,速度跟踪较好,误差很小。此外,转矩跟踪控制模式的性能也是较好的,转矩脉动很小。
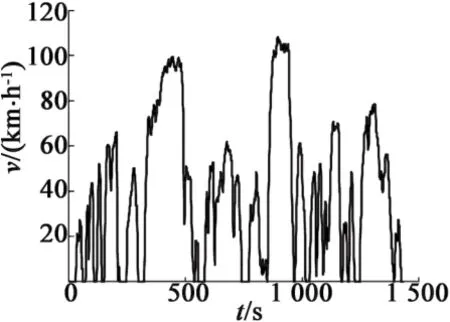
图9 转速循环测试中转速参考曲线

图10 转速循环测试结果
6 结 语
本文介绍了一种用于EV的无速度传感器IM驱动控制策略,结合使用了间接矢量控制器和FBLSMO滑模观测器。由于只有定子电流需要被测量,因此系统成本降低,同时系统可靠性提高。文中给出了FBLSMO详细的设计过程,即使在不知道负载转矩的情况依然可以准确地估计出转速和磁链。而间接矢量控制器包含了前馈环节,系统响应速度也得到了提高。最后通过试验,验证了新型控制器的性能。
[1] 申永鹏,王耀南,孟步敏,等.增程式电动汽车功率流优化策略[J].中国电机工程学报,2015,35(16):4035-4042.
[2] 陈丽丹,聂涌泉,钟庆.基于出行链的电动汽车充电负荷预测模型[J].电工技术学报,2015,30(4):216-225.
[3] 李佩杰,林颂晨,白晓清,等.计及配电网三相模型的电动汽车充电滚动时域控制[J].中国电机工程学报,2016,36(17):4533-4542.
[4] 陈静鹏,朴龙健,艾芊,等.基于分布式控制的电动汽车分层优化调度[J].电力系统自动化,2016,40(18):24-31.
[5] 赵志刚,骆志伟,胡小龙,等.四轮独立驱动电动车控制系统设计与研究[J].微特电机,2016,44(11):51-53.
[6] 孙悦超.电动汽车驱动方式及未来发展[J].电机与控制应用,2016,43(11):98-102.
[7] DIXON J,NAKASHIMA I,ARCOS E F,et al.Electric vehicle using a combination of ultracapacitors and ZEBRA battery[J].IEEE Transactions on Industrial Electronics,2010,57(3):943-949.
[8] KIM D,HWANG S,KIM H.Vehicle stability enhancement of fourwheel-drive hybrid electric vehicle using rear motor control[J].IEEE Transactions on Vehicular Technology,2008,57(2):727-735.
[9] AKIN B,OZTURK S B,TOLIYAT H A,et al.DSP-based sensorless electric motor fault-diagnosis tools for electric and hybrid electric vehicle powertrain applications[J].IEEE Transactions on Vehicular Technology,2009,58(6):2679-2688.
[10] ORTUZAR M,MORENO J,DIXON J.Ultracapacitor-based auxiliary energy system for an electric vehicle:Implementation and evaluation[J].IEEE Transactions on Industrial Electronics,2007,54(4):2147-2156.
[11] 康敏,孔武斌,黄进.电动汽车用五相感应电机容错控制[J].电机与控制学报,2014,18(3):1-6.
[12] 张兴华,孙振兴,王德明.电动汽车用感应电机直接转矩控制系统的效率最优控制[J].电工技术学报,2013,28(4):255-260.
[13] 裴文卉,符晓玲,张承慧.电动汽车用感应电机动态平衡点的反馈耗散Hamilton控制[J].控制理论与应用,2013,30(9):1138-1144.
[14] YANG Y P,LIU J J,WANG T J,et al.An electric gearshift with ultracapacitors for the power train of an electric vehicle with a directly driven wheel motor[J].IEEE Transactions on Vehicular Technology,2007,56(5):2421-2431.
[15] LIN F J,HUNG Y C,HWANG J C,et al.Digital signal processor-based probabilistic fuzzy neural network control of in-wheel motor drive for light electric vehicle[J].Iet Electric Power Applications,2012,6(2):47-61.
[16] GHARIANI M,HACHICHA M R,LTIFI A,et al.Sliding mode control and neuro-fuzzy network observer for induction motor in EVs applications[J].International Journal of Electric&Hybrid Vehicles,2011,3(1):20-46.
[17] 肖海峰,贺昱耀,李凯.直接转矩变结构控制的无速度传感器交流感应电机系统[J].微特电机,2014,42(1):63-65.
[18] 韦文祥,刘国荣.基于扩展状态观测器模型与定子电阻自适应的磁链观测器及其无速度传感器应用[J].中国电机工程学报,2015,35(23):6194-6202.
[19] ORLOWSKAKOWALSKA T,DYBKOWSKI M.Stator-currentbased MRAS estimator for a wide range speed-sensorless induction-motor drive[J].IEEE Transactions on Industrial Electronics,2010,57(4):1296-1308.
[20] MAITI S,CHAKRABORTY C.An alternative adaptation mechanism for model reference adaptive system based sensorless induction motor drive[J].Electric Power Components&Systems,2010,38(6):710-736.
[21] 程代展.应用非线性控制[M].北京:机械工业出版社,2009.
