基于模糊算法的电动车牵引力控制器设计
2017-05-02李素蕊
孙 明, 李素蕊
(1.新乡职业技术学院 电子信息系,河南 新乡 453006;2.新乡医学院三全学院 电子信息系,河南 新乡 453003)
基于模糊算法的电动车牵引力控制器设计
孙 明1, 李素蕊2
(1.新乡职业技术学院 电子信息系,河南 新乡 453006;2.新乡医学院三全学院 电子信息系,河南 新乡 453003)
介绍了TCS系统的基本工作原理,分析了各部分的电路设计,开发了基于单片机XC2365的硬件系统;根据TCS系统控制原理,采用模糊算法控制电动车的电机输出转矩;采用硬件在环仿真台架对电动车的TCS系统进行了仿真试验.通过对比试验说明,装备TCS系统的电动车具有很好的纵向稳定性.
电动车;牵引力控制;模糊算法;微控制器
随着全球车辆保有量的逐年增加,能源消耗也持续攀升.能源的大量消耗造成了环保安全和能源紧缺等社会问题.为了应对这些问题,世界各国开始积极研发能够降低车辆能源消耗的新技术,其中,电动汽车方面的研发尤为突出[1-3].电动汽车以电作为能源,以电机提供动力,使得它在牵引力控制(Traction Control System,简化为TCS)方面也与传统车辆不同.牵引力控制能够保证车辆在软路面、低附着冰雪的湿滑路面上行驶时,不出现打滑的情况,保证车辆不出现甩尾问题.
而国内对于电动车牵引力控制的研究起步较晚,且较多地集中在控制算法和传统车辆牵引力控制方面.本文结合车辆纵向动力学、电机传动控制、电子技术等学科,设计了适用于电动车的牵引力控制系统.
1 系统的总体设计
1.1 TCS基本工作原理


图1 轮胎附着系数和滑转率的关系
1.2 电动车牵引力控制系统的总体结构
电动车牵引力控制系统与传统燃油车辆相比,主要有两点不同:(1)响应速度、电动车的电机转矩输出的时间在20ms左右,而传统车辆则需要100ms的时间.(2)电机输出扭矩的大小可以通过采集到的电流来计算.
TCS系统结构框架如图2所示,微控制器能控制无刷直流电机作为电动车辆的动力输出.车辆的车轮角速度可以通过电机转速测得.车辆的纵向车速可以通过加速度传感器或者采用基于车轮角速度的卡尔曼滤波算法估计得出.根据滑转率公式可计算出当前车辆起步时的滑转率.微控制器根据当前车辆滑转率与目标滑转率的差值,采用模糊算法调整当前电机的输出扭矩.

图2 TCS系统结构框架图
2 系统硬件设计
微控制器是电动车动力源的重要组成部分.本设计中,微控制器选用英飞凌公司的C166架构的XC2000系列单片机XC2365,实现无刷直流电机的转向、调速等功能.XC2365通过霍尔位置检测电路和电流采样电路得到转子位置和电流数据,根据模糊算法计算后输出相应的控制信号.控制信号经过功率驱动电路后进入逆变电路将直流电逆变成三相交流电.逆变电路如图3所示,采用6个意法半导体公司的STP75NF75构成全桥电路.功率驱动部分的三个控制引脚控制全桥上桥臂3个MOSFET管的开关.功率驱动部分的另外3个引脚控制下桥臂3个MOSFET管的开通与闭合.图3中网络标号为Motor的3个引脚连接直流无刷电机的三相控制端.
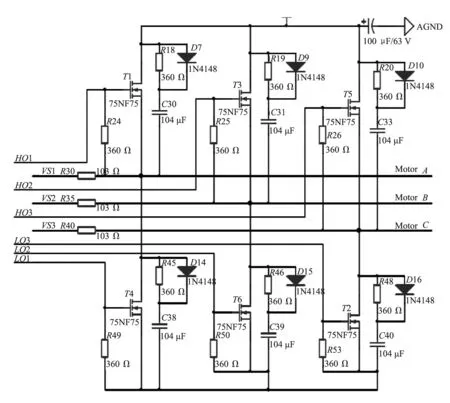
图3 功率逆变电路
功率驱动部分主要用于增加系统的驱动能力.电路如图4所示,采用IR公司的IR2130芯片,芯片的输入端接单片机XC2365的6个PWM(脉冲宽度调制控制)接口;输出端接功率逆变电路.
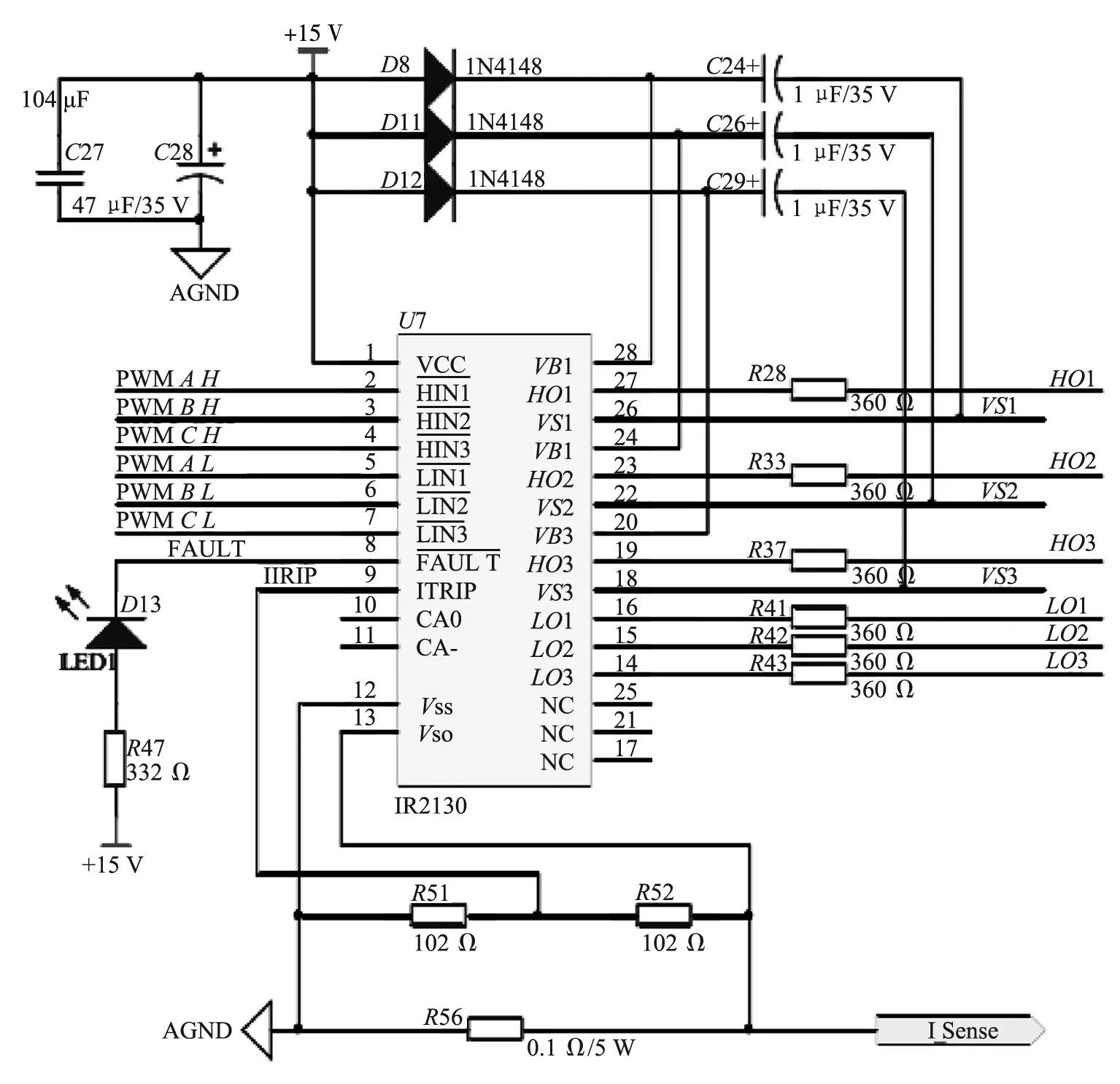
图4 功率驱动电路
霍尔位置检测电路主要负责检测电机转子的位置及转速,控制器以无刷直流电机转子的位置信息为参考,对电机进行换相,电路如图5所示.霍尔传感器是开关型的,分别连接电机的三相.考虑到车辆内部的电磁环境和保证信号的准确性,采用RC低通滤波器对信号进行滤波.

图5 霍尔位置检测传感器电路
电动车整个电控部分由多个微控制器构成,微控制器之间的通信采用CAN(控制器局域网络)总线方式,因此,牵引力控制系统需要扩展CAN总线接口,这样可以将数据信息通过CAN总线传送给其他的微控制器.单片机XC2365的内部集成了CAN总线控制器,因此仅需设计CAN总线收发器部分的电路即可.本文采用NXP公司的NX82C250芯片作为CAN收发器.
牵引力控制系统中的各个模块需要用到不同电平的直流电压,依次为12 V,5 V,3.3 V.12 V电压为功率逆变电路部分的芯片进行供电,5 V电压为光耦隔离电路供电,3.3 V电压负责为单片机供电.电源采用48 V铅酸蓄电池,经过芯片LM317将电平转换为12 V,再使用LM2596芯片得到5 V电压,最后使用芯片TPS77533将电平转换为3.3 V电压.
3 模糊控制器设计
牵引力控制系统采用模糊算法,模糊算法结构如图6所示.两个输入量分别为当前滑转率与最优滑转率的差值E及差值的变化率EC.根据模糊规则控制电机转矩M的大小,以改变当前电动车的滑转率.

图6 模糊算法结构图
3.1 模糊规则
滑转率的差值E设置为7个语言变量,分别为负大(NB)、负(N)、零(Z)、正(P)、正大(PB)、PS(正小)和NS(负小),如图7滑转率附着系数曲线所示,在t时刻,当前滑转率在最优目标滑转率的左边时,E为正大或正;当前滑转率在最优滑转率的右边时,E为负大或负;当前滑转率等于最优滑转率时,E为零.
滑转率变化率EC设置为同样的7个语言变量.如图7(a)所示,在t-1和t时刻,当前滑转率同在最优滑转率的右边,且滑转率在t时刻的值大于t-1时刻,这时EC为正大或者正,说明当前时刻电机输出转矩值需要继续减小,以降低轮速,才能使得滑转率逐渐回到目标滑转率附近.根据图7(b)、图7(c)和图7(d)可得EC相应的语言变量.
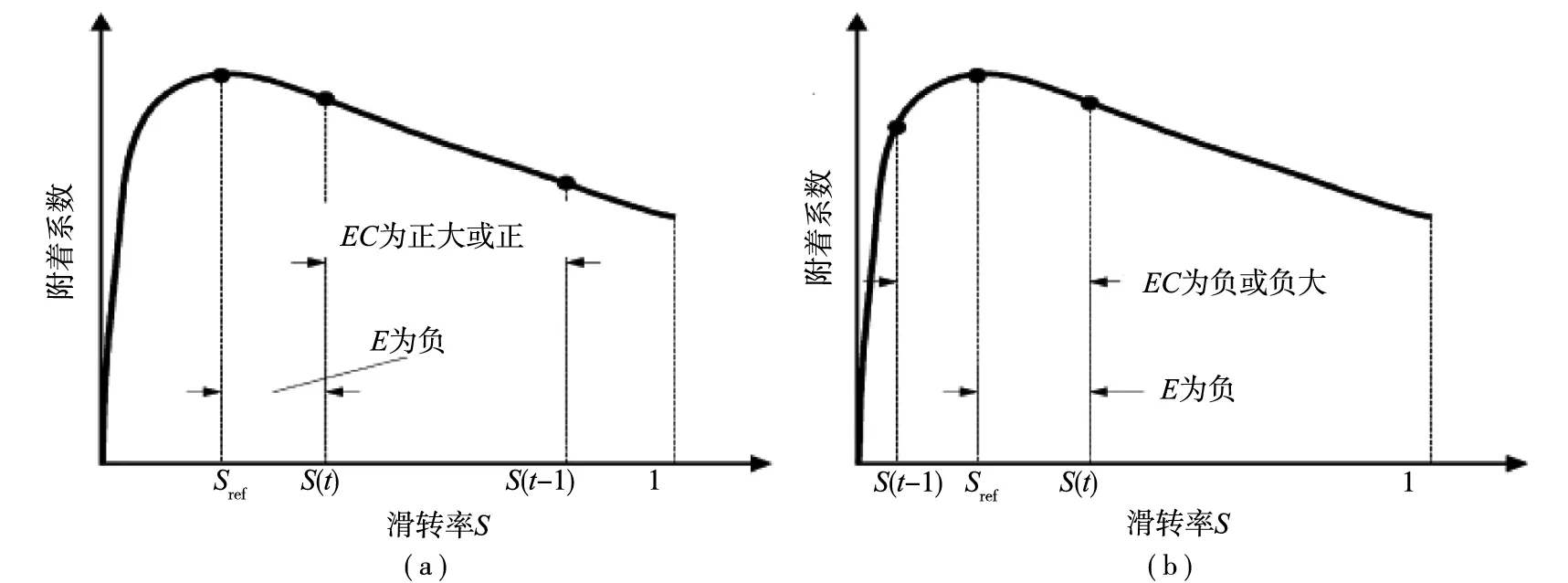

图7 模糊推理图
电机输出转矩推理规则见表1.

表1 电机输出转矩推理规则
3.2 解模糊
解模糊是将上述模糊量进行清晰化和量化的过程.根据大量的数据分别设置输入量和输出量的量化因子,电机输出转矩由模糊规则乘以相应的量化因子可得.
4 系统验证
在完成牵引力控制系统硬件和软件设计后,采用硬件在环仿真技术进行了测试.硬件在环仿真时不受时间和空间约束,能够实时模拟车辆在不同路况下的夏季试验和冬季试验,这可节约项目开发的时间.硬件在环仿真系统如图9所示.将所设计的牵引力控制系统安装在硬件在环仿真系统实验台架上,仿真结果如图10、图11、图12所示.

图9 硬件在环仿真系统台架
在附着系数为0.25左右的工况下,初始车速设置为9 km/h,每个车轮的电机输出转矩为450 N·m.图10所示车轮角速度的结果显示,在无TCS系统控制下,车轮角速度迅速增加,远大于纵向车速,电动车车轮发生了滑转现象;而在TCS系统控制下,车轮角速度和车辆纵向车速一致.图11所示车辆滑转率的对比结果显示,在无TCS系统下车辆滑转率变化剧烈;在TCS控制下,车辆滑转率维持在最优滑转率附近.图12车辆输出转矩的结果显示,在TCS控制下转矩输出值远小于无TCS下的值.

图10 车轮角速度对比

图11 车辆滑转率对比

图12 输出力矩对比
5 结语
本文对电动车牵引力控制系统的硬件系统进行了设计,将模糊控制算法应用于TCS中,并通过硬件在环仿真系统实验台架进行了测试.试验结果表明,TCS系统达到了设计要求,有效地保证了电动车在起步阶段的纵向稳定性和乘车舒适性.
[1] 王吉.电动轮汽车制动集成控制策略与复合ABS控制研究[D].吉林:吉林大学,2011.
[2] MAGALLAN A.Maximization of the Traction Forces in a 2WD Electric Vehicle [J].IEEE Transactions on Vehicular Technology,2011,60(2):369-380.
[3] WONG J Y.Theory of Ground Vehicles [M].New York:Wiley-Inter science,2011:5-23.
[4] HU J S.Fault-tolerant Traction Control of Electric Vehicles Control[J].Engineering Practice,2011(9):204-213.
[5] 郭孔辉,王德平.汽车驱动防滑控制理论的初步研究[J].吉林工业大学学报,1997,27(3):1-4.
[6] YIN D.A Novel Traction Control for EV Based on Maximum Transmissible Torque Estimation [J].IEEE Transaction on Industrial Electronics,2009,56(6):2086-2094.
[7] MA C B.Dynamic Emulation of Road/Tyre Longitudinal Interaction for Developing Electric Vehicle Control Systems [J].Vehicle System Dynamics,2011,49(3):433-447.
责任编辑:金 欣
Design and realization of electric vehicle TCS based on fuzzy control algorithm
SUN Ming1, LI Su-rui2
(1. Department of Electronic Information, Xinxiang Vocational and Technical College, Xinxiang, Henan 453006, China;2. Department of Electronic Information, Sanquan College of Xinxiang Medical University, Xinxiang, Henan 453003, China)
A novel method of traction control system is discussed in terms of the function and structure. On this basis, a single chip microcontroller unit XC2365 is designed. And the fuzzy control algorithm-controlled hardware-in-loop is made and tested, with a satisfactory result. The longitudinal stability of the electric vehicle is greatly improved.
electric vehicle; traction control system; fuzzy algorithm; MCU
2016-06-12
孙 明(1982-),男,河南新乡人,新乡职业技术学院讲师,主要从事计算机教学、计算机编程等方面的研究工作; 李素蕊(1983-),女,河南新乡人,新乡医学院三全学院讲师,硕士,主要从事医学电子教学、医学工程等方面的研究工作.
1009-4873(2017)02-0022-06
TP273.4
A