一种MMC电机拖动系统的低频控制方法
2017-05-02胡鹏飞郭云涛
王 蕊,曹 磊,胡鹏飞,郭云涛
(1.东南大学,南京 210096;2.南京汇洁能电力电子技术有限公司,南京210000)
0 引 言
模块化多电平换流器(以下简称MMC)由于其高度模块化、易拓展和输出性能好的特点,得到了科技工作者和学者们的广泛关注,其应用领域也日益广泛,如基于背靠背结构的轻型直流输电[1]、电能综合治理补偿装置[2]、光伏并网逆变器[3]、电机驱动[4]和变频调速[5-6]等。一方面,MMC的拓扑结构决定了它可以拓展到高电压等级;另一方面,在高压大功率传动领域,高压大功率电动机的控制亟需合理的控制方法,以实现其高效节能的运行。因此,将MMC用于电机拖动是一项突破性进展,具有十分重要的科学研究和工业应用价值。
MMC应用于高压电机拖动系统有诸多优势:(1)拓扑结构方面:各个子模块结构相同,可方便地扩展到高电压等级;便于冗余设计。(2)功能方面:交-直-交的结构和IGBT的全控性,可驱动电机再生制动,能够实现能量双向流动。(3)输出波形方面:输出电压的电平数多,谐波含量少,可降低整个系统中谐波损耗和器件应力;同时du/dt减小,可以减少对电机的绝缘损坏。
但是MMC电机调速系统在实际应用中却面临着一些问题。电机有两类典型负载:风机、泵类负载和恒转矩负载。在电机带恒转矩负载的调速过程中,当电机工作频率较低,或者电机刚刚起动时,会出现低频问题,如电机的电磁转矩过大,起动电流过大,子模块电容电压的波动较大[7],而导致MMC电机拖动系统无法正常运行。因此,MMC用于高压电机调速的关键难点在于低频运行工况。
1 MMC拓扑和电机拖动系统
MMC电机拖动系统的拓扑结构如图1所示。每一个功率单元子模块(sub-module,SM)均指半桥结构,如图2所示。
如图1所示,MMC电机拖动系统主要由3部分构成:网侧变换器MMC1、公共直流母线和机侧变换器MMC2,整体上构成了交流-直流-交流的结构。网侧MMC1将电网侧的交流电整流成直流电压Udc,通过控制网侧MMC1可以使电网侧的电压和电流同相位,从而实现整个系统单位功率因数运行。机侧MMC2将直流电压Udc逆变成电机侧的交流电压,电机侧MMC2相当于一个幅值和频率可变的交流电压源来驱动电机,通过控制MMC2即可以实现电机的变频调速。
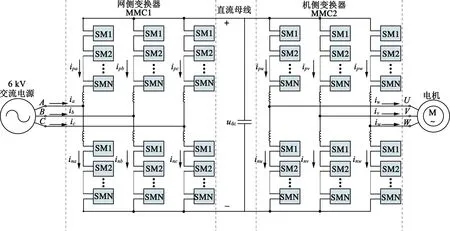
图1 MMC电机拖动系统的拓扑结构

图2 功率单元子模块SM
MMC电机拖动系统中,调制策略采用的是载波移相正弦调制方法(CPS-SPWM)[1],子模块电容电压平衡的控制策略采用的是能量均分控制和电压均衡控制相结合的分层控制[8]。电机调速采用恒压频比的控制方式,即V/f控制。
2 模块电容电压均衡控制
MMC稳定工作的前提是子模块直流电容电压的稳定,常用的MMC子模块电容电压均衡控制有两类,分别是排序充放电均压控制和能量分层均压控制。本文采用的是能量均分控制和电压均衡控制相结合的能量分层均压控制方法。能量分层控制的具体实现过程已在诸多文献[2,9]中详述,本文只简单介绍。
(1)外层控制为桥臂能量均分控制,是为了保证总能量在三相之间均分,力使三相的MMC桥臂的子模块电容电压值无差别。具体实现由电压外环和电流内环构成,如图3所示。
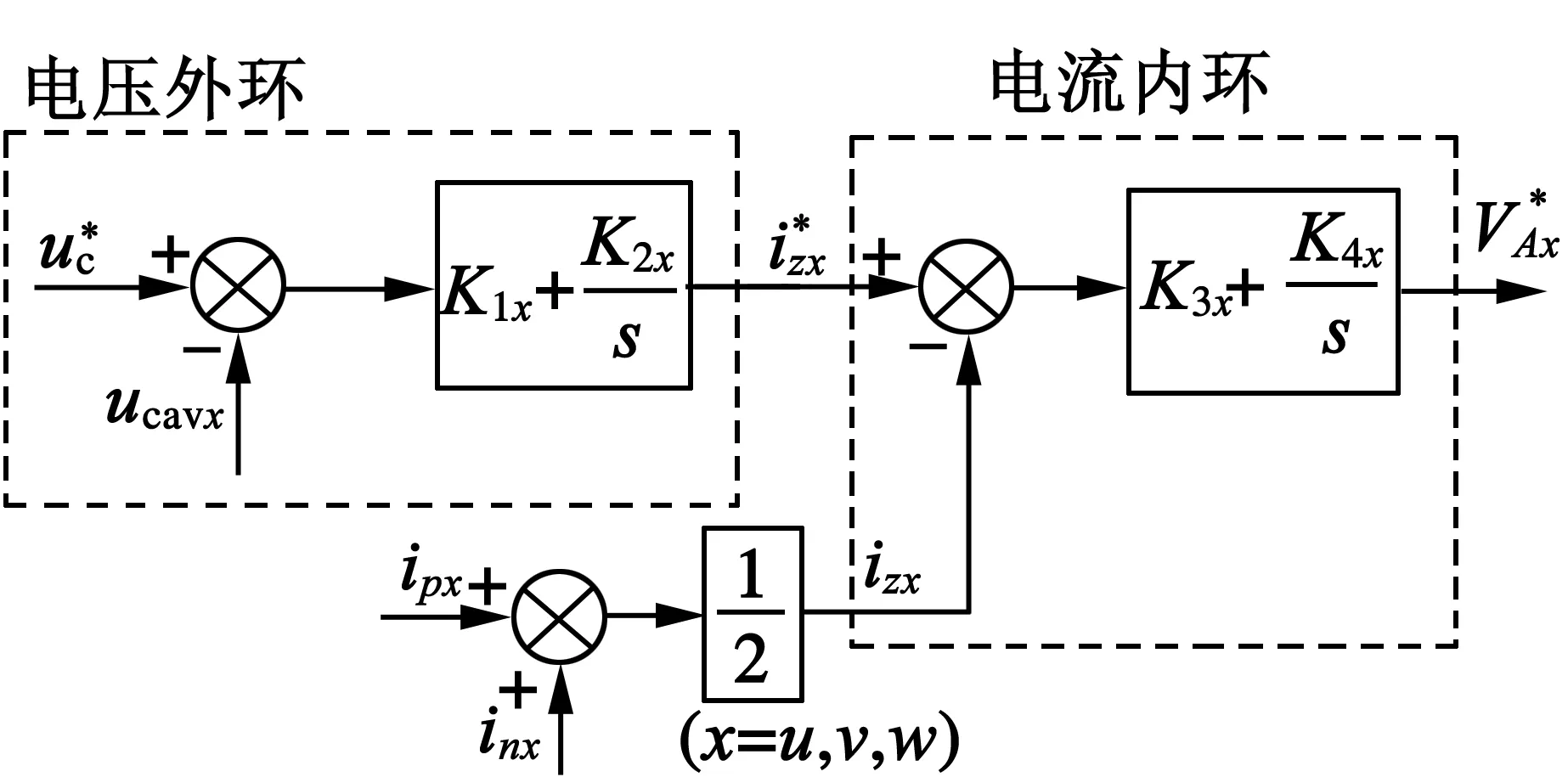
图3 能量均分控制原理框图
图3中:

(1)
式中:ucxj为相单元x(x=u,v,w)中第j(j=1~N)个子模块的电容电压;N为桥臂的子模块个数。

(2)

(3)
式中:K1x为电压外环PI控制器的比例系数;K2x为电压外环PI控制器的积分系数;K3x为电流内环PI控制器的比例系数;K4x为电流内环PI控制器的积分系数。
(2)内层控制为电压均衡控制,是为了保证每一相的能量在该相不同的MMC子模块之间的均分,力使每一相的MMC子模块的子模块电容电压值无差别。实现过程如图4所示。
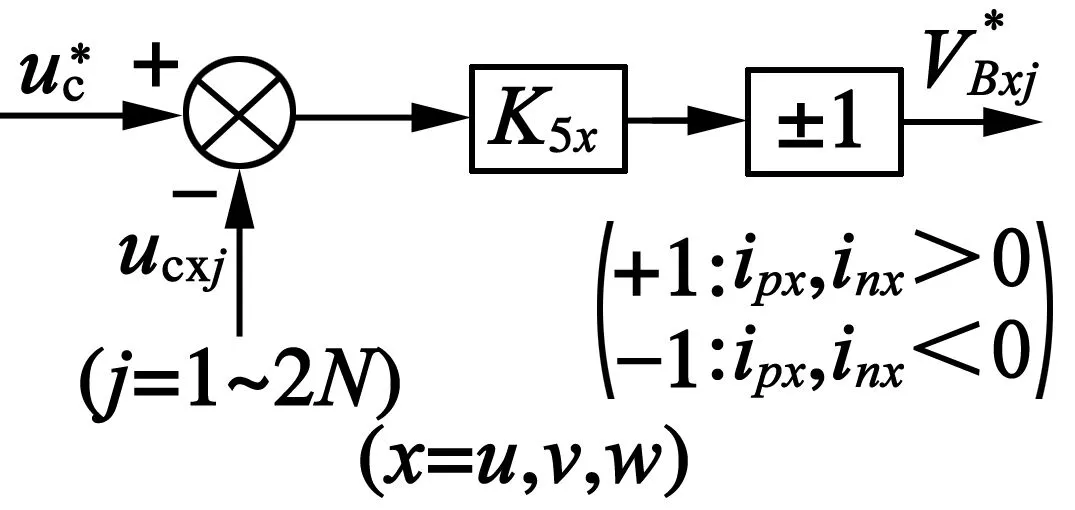
图4 电压均衡控制原理框图
上、下桥臂的均压控制可用公式表示如下。
上桥臂:

(4)
下桥臂:

(5)
式中:K5x为PI控制器的比例系数。
最后,通过式(1)、式(2)两层控制的结合,即可控制整个MMC中所有子模块电容电压值几乎相等。
将以上外层和内层产生的均压校正量都加入到每个MMC子模块的调制波中,如图5所示。
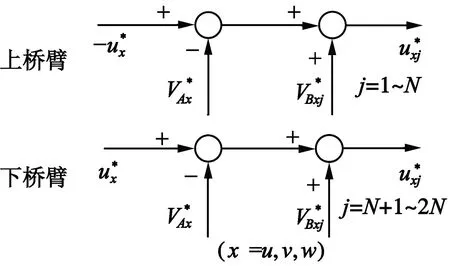
图5 每个子模块的调制波
上桥臂子模块:

(6)
下桥臂子模块:

(7)
3 低频运行控制策略
3.1 低频控制原理
MMC用于高压电机拖动,通常会接两种负载:风机、泵类负载和恒转矩负载。当MMC电机拖动系统接风机、泵类负载时,这类负载的转矩是转速的平方,当转速降低时,电流比转速减小更快,子模块电容电压波动范围变小;当MMC电机拖动系统接恒转矩负载时,当电机运行于较低转速时,子模块电容电压的波动幅度会较大,尤其在电机刚起动时,转速由零开始上升,负载转矩一直不变,子模块电容电压波动十分剧烈。
由子模块电容电压的波动规律[10]可知,影响子模块电容电压波动的主要因素是输出电流的幅值和频率。为了抑制电机低频运行时子模块电容电压波动过大,可以从这两个方面着手,于是有两类方法:一类是减小输出电流的幅值;另一类是增大输出电流的频率。减小输出电流幅值可通过降额运行[11-12],增大输出电流频率可通过高频分量注入,比如在桥臂电压和桥臂电流中分别注入高频零序电压和高频零序电流等。此外,还有一些非主流的低频控制方法,如文献[13]提出了基于“功率通道”的新型低频脉动抑制方法,但是此方法需要构造“隔离型双向变换器”的电路结构,大大增加了元器件个数,提高了装置成本。
当前已有的MMC低频运行大多采用第二类,即注入高频零序电压和高频零序电流的方式,已有部分文献发表。文献[13]中提到注入正弦波叠加3次谐波或方波,以提高注入分量的基波利用率,进而降低桥臂电流的幅值。文献[14]通过实验表明,在幅值相同的情况下,与叠加正弦波相比,叠加方波可将共模电压和相间环流的有效值提高1.414倍。文献[15]通过注入高频零序电压和高频环流的方式来增加子模块电容电压的波动频率,进而抑制电容电压波动幅度,但是实现过程比较复杂。文献[16]通过瞬时功率思想得出所需高频环流,但并没有具体说明高频的频率选择办法,应用性不强。而本文所提方法思路清晰,推理步骤清晰,简明高效。
本文按照如图6所示思路来推导。
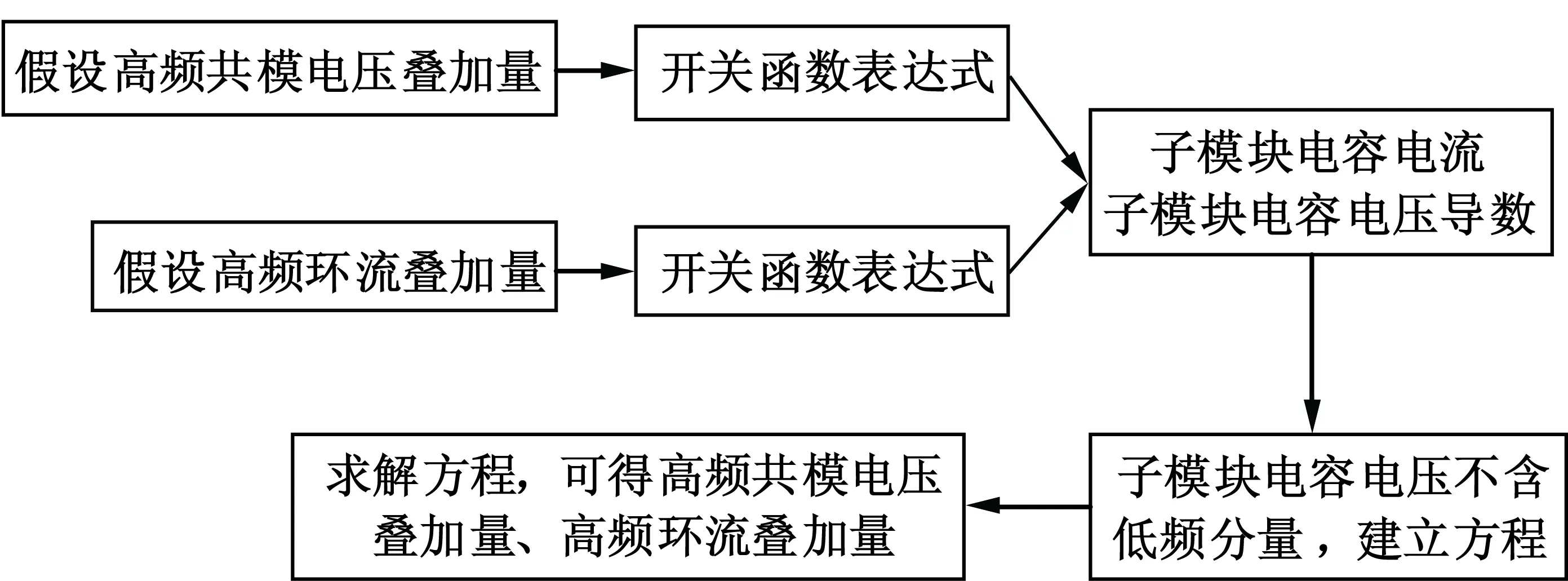
图6 高频零序电压和环流推导思路
为了提高MMC子模块电容电压的波动频率,可以在MMC输出相电压中注入高频零序电压u0,而在MMC每一相的桥臂电流中注入高频环流ipcx(x=u,v,w)。注入时必须满足:相电压中注入的高频零序电压不能影响MMC输出的线电压大小,桥臂电流中注入的高频环流未能在三相内部流动,不能影响负载电流。
对于U相,子模块电容电压满足:
式(8)中:
(10)

(11)
式(9)中:
(12)

(13)
当ppcm中仅含高频分量时:
(14)
从而可得:
(15)
当ppdm中仅含高频分量时:
(16)
从而可得:
(17)
由于u0存在过零点,不能直接被除。因此要对式(16)中的u0·ipcu积化和差,然后消去低频。
设叠加的高频零序电压:
u0=U0msin(ω0t)
(18)
则:
(19)
环流中含有的频率分量:ω0±ωs,ω0±3ωs。此时:
由式(20),MMC子模块电容电压ucpu所含频率分量有ω0±ωs,ω0±2ωs,ω0±3ωs,ω0±4ωs,2ω0±ωs,2ω0±3ωs。选取ω0时,要注意:
ω0≥5ωs
(21)
这样可确保MMC子模块电容电压波动频率大于等于ωs。为抑制MMC子模块电容电压低频脉动,需要在3个相单元中注入高频环流:
(22)
三式相加得:
(23)
由式(23)知,三相电流之和不含直流量,因此所注入高频环流不会影响负载电流,也不会影响直流母线电压。
3.2 低频控制环节的具体实现
低频控制的具体实现过程首先需要考虑注入的高频零序电压的幅值大小,由式(22)可以得出结论:注入环流的大小与注入的高频零序电压幅值成反比,即注入的高频零序电压越小,与之对应的环流注入就越大。而环流增大会导致MMC开关器件电流应力增大、安全裕量不足,还会增加系统损耗。基于此考虑,需要使环流注入尽可能小,则对应的高频零序电压幅值应该尽可能大。当正弦脉宽调制(SPWM)时,输出相电压的幅值:
(24)
式中:m2为电机侧MMC2的调制比;又因为0≤m2≤1,所以可得零序电压幅值U0m最大值:
(25)
再考虑到部分裕量,零序电压幅值U0m:
(26)
将临界频率定为30 Hz,又ω0≥5ωs,因此取ω0=300π rad/s。引入ctrl信号作为电机低频的标志位信号。当电机实际工作频率fs小于临界频率30 Hz时,标志位ctrl置1,即为低频模式,如图7所示,此时后续要叠加注入高频分量的低频控制环节。
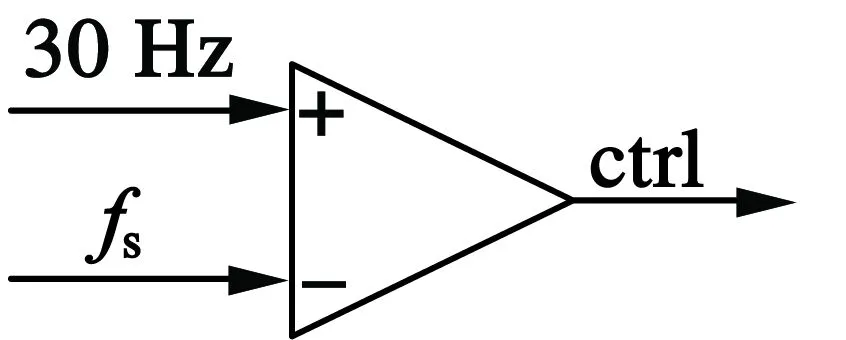
图7低频模式图
由式(26)得到零序电压幅值U0m,乘以高频正弦量sin(ω0t)即为零序电压瞬时值u0,当标志位ctrl=1时,将u0叠加到MMC输出电压指令uxref中,其原理框图如图8所示。
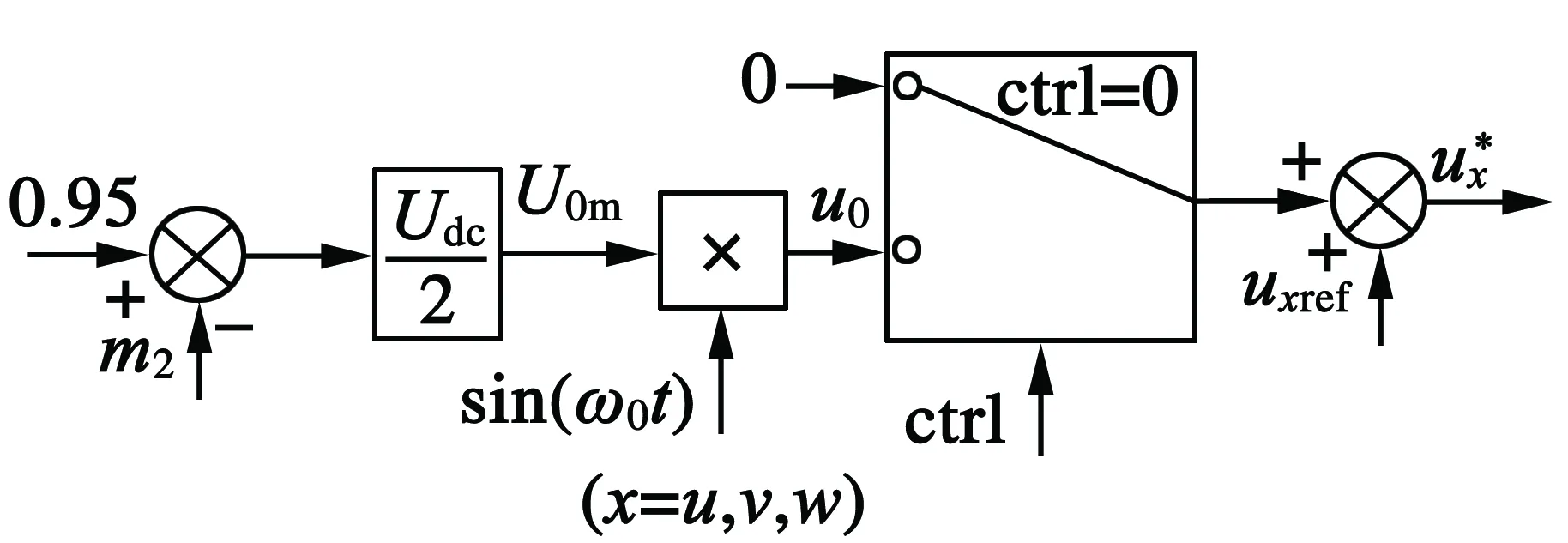
图8 结合低频控制的MMC输出电压指令
由式(22)的高频环流公式,结合低频控制的高频环流生成过程如图9所示。当标志位ctrl=1时,将此高频环流叠加到MMC环流指令中,如图10所示。
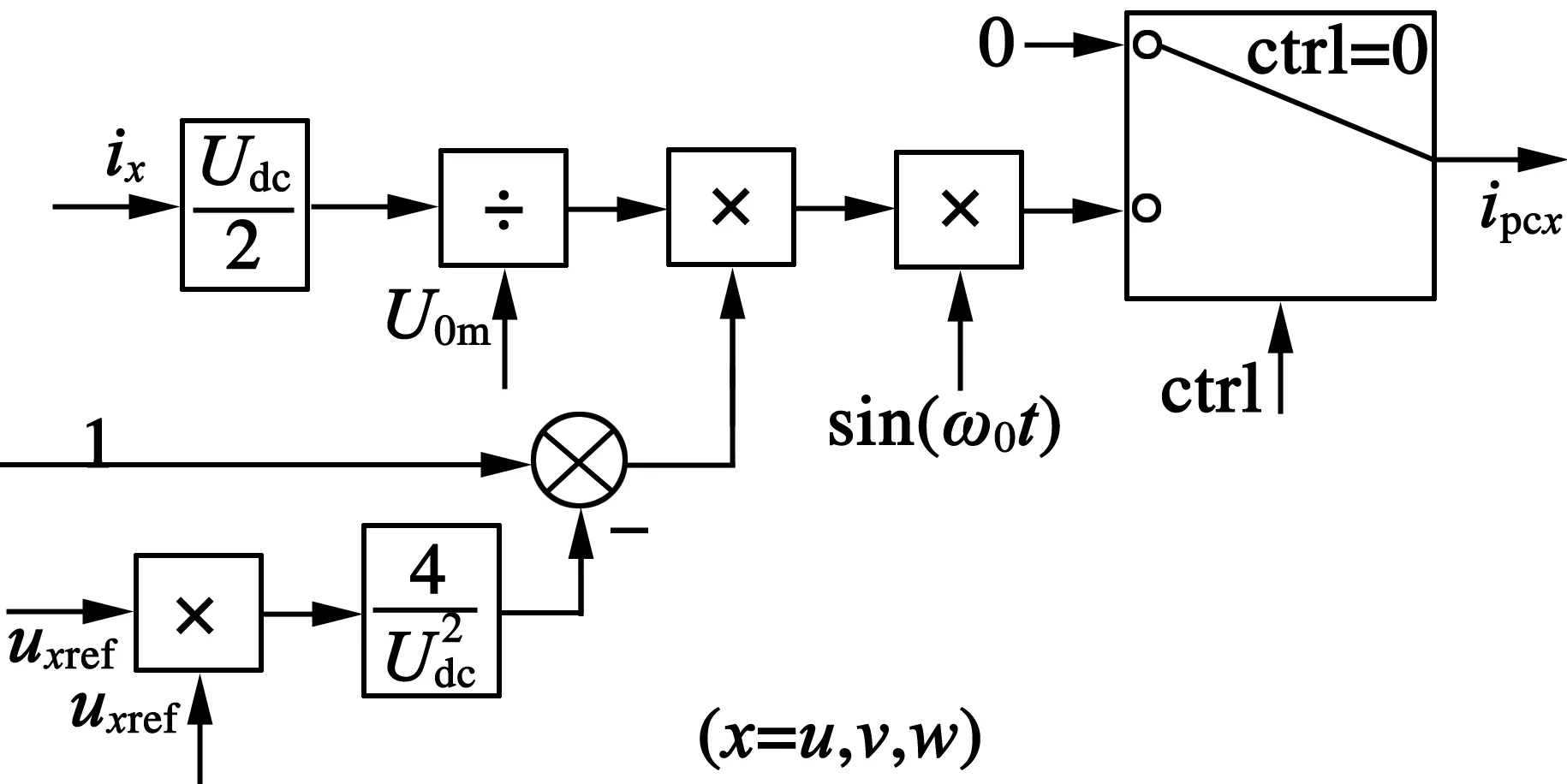
图9 结合低频控制的高频环流生成
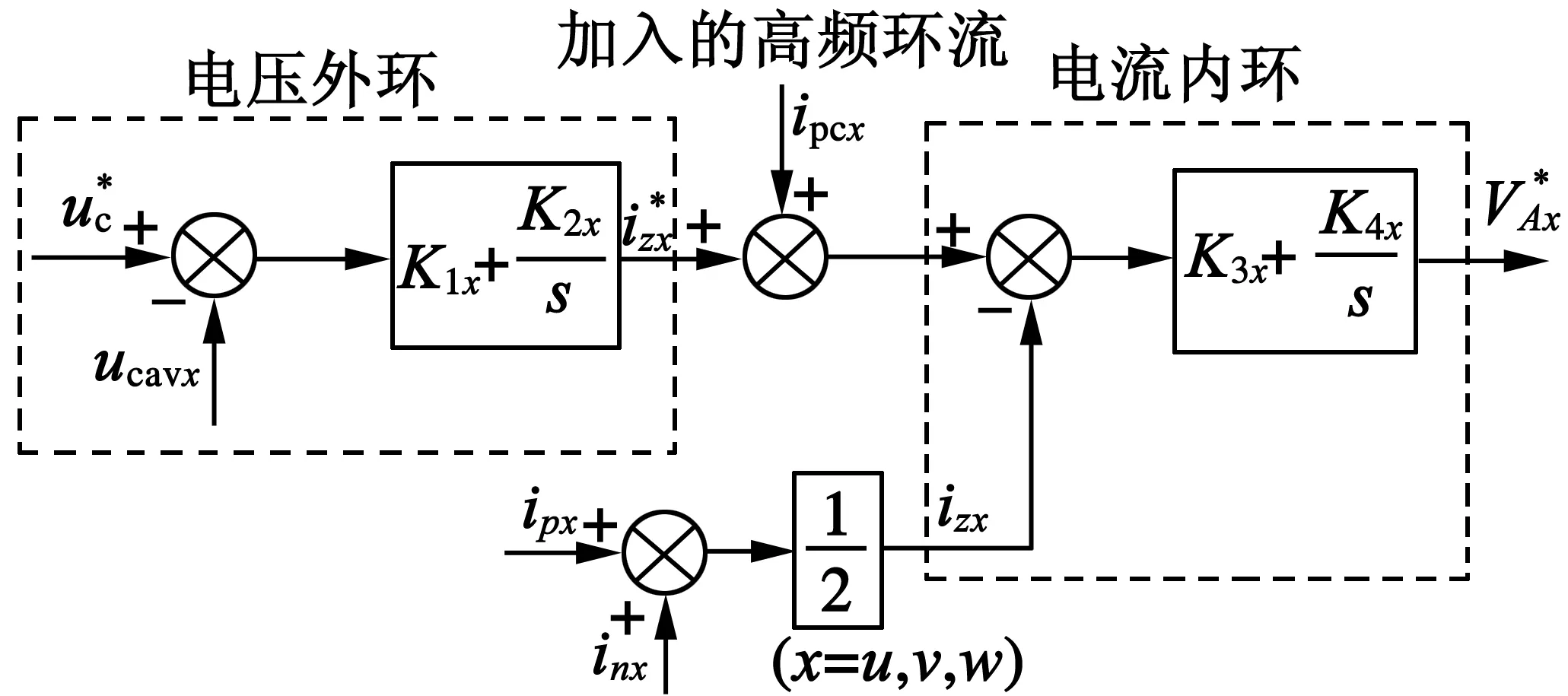
图10 结合低频控制的能量均分控制
4 仿真验证
为了验证MMC电机拖动系统的低频运行策略,借助于电磁暂态仿真软件PSCAD,搭建了MMC电机拖动系统仿真模型。仿真模型的电路结构如图1所示,仿真参数如表1所示,电机的其他相关参数如表2所示。

表1 仿真参数

表2 电机参数
一般工况下电机的起动过程如图11所示,即没有采用低频控制策略时的上、下桥臂子模块电容电压波形。此时MMC子模块电容电压波动幅值约40 V,波动值是正常电压稳定值的13.3%,这会威胁到MMC电机拖动系统的正常工作。为了减小此时的MMC子模块电容电压波动,迫切需要加入低频控制策略。此外,可由图11中选取是否加入低频控制的临界频率。观察图11中曲线可知,电机刚起动时,MMC子模块电容电压的波动十分剧烈,而在1.2 s之后,MMC子模块电容电压基本不再波动,因此选定临界频率为1.2 s时对应fs=30 Hz。即当电机工作频率小于等于30 Hz时,加入低频控制环节,否则不加入低频控制环节。
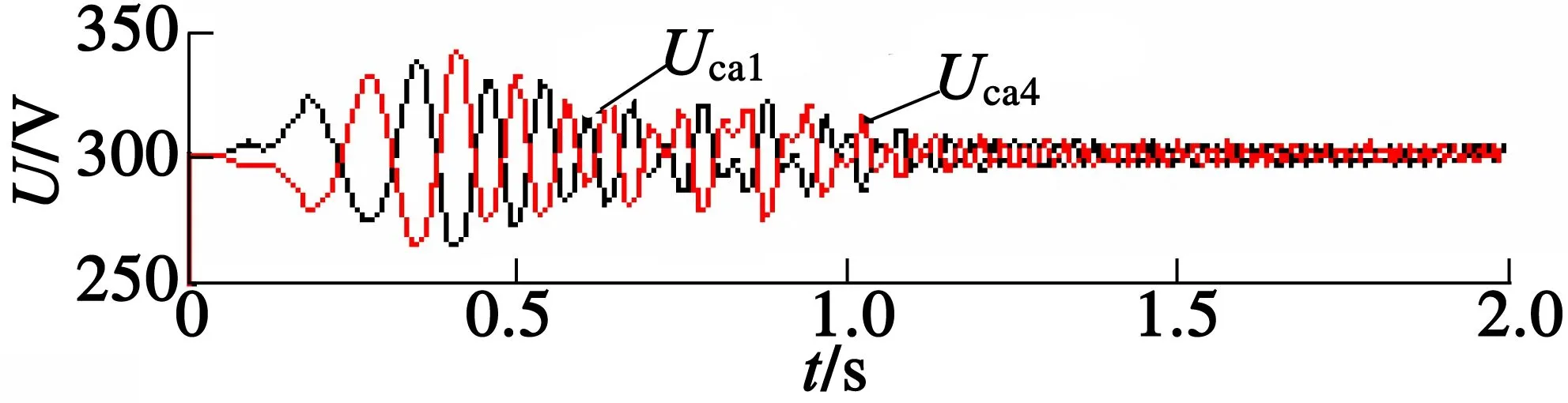
图11 未采用低频控制策略的电机起动过程仿真波形
采用低频控制策略后电机起动过程中上、下桥臂子模块电容电压波形如图12所示。对比图11和图12可知:未加入低频控制环节时,MMC子模块电容电压波动范围是260~340 V;而加入低频控制环节之后,MMC子模块电容电压波动范围是290~310 V,波动范围缩小了75%,说明低频控制策略确实抑制了MMC子模块电容电压的波动,为MMC电机拖动系统的正常稳定工作提供了必要前提。由此可见,本文的注入高频零序电压和高频零序电流的低频控制方法有效。
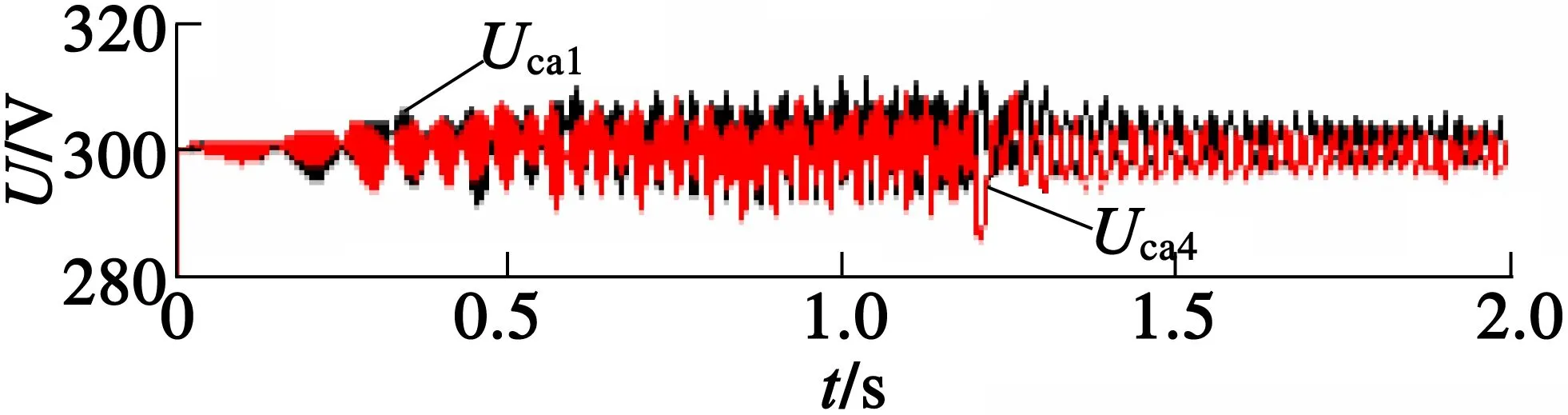
图12 采用正弦波法的电机起动过程仿真波形
5 结 语
MMC电机拖动系统在接恒转矩负载运行时,低频时子模块电容电压波动过大会直接威胁系统的稳定性。本文的低频控制方式先设定相电压和低频时的高频共模电压叠加量,从中得到开关函数,再设定输出相电流和高频环流叠加量,得到桥臂电流,最后将开关函数和桥臂电流相乘,得到子模块电容电流,即得到子模块电容电压的导数。通过子模块电容电压中不含低频分量,可得到方程,求解即可得出所需叠加的高频电压和高频电流。仿真验证了本文所提MMC电机拖动系统低频控制方式的正确性和有效性。MMC电机拖动系统的低频控制方法解决了MMC高压电机交流调速中的低频运行问题,有利于高压电机拖动系统领域的技术发展和应用推广。
[1] 赵昕,赵成勇,李广凯,等.采用载波移相技术的模块化多电平换流器电容电压平衡控制[J],中国电机工程学报,2011,31(21):48-55.
[2] 任洪强.基于模块化多电平的电能质量综合补偿实验研究[D].南京:东南大学,2016.
[3] 冯建洲.非正常工况下模块化多电平变换器的控制策略研究[D].济南:山东大学,2016.
[4] ANTONOPOULOS A,ANGQUIST L,NORRGA S,et a1.Modular multilevel converter AC motor drives with constant torque from zero to nominal speed[J].IEEE Trans on Industry Applications,2014,50 (3):1982-1993.
[5] LI Ke,ZHAO Chengyong.New technologies of modular multilevel converter for VSC-HVDC application[C]//Asia-Pacific Power and Energy Engineering Conference.Beijing,China:IEEE,2010:1-4.
[6] 张犁,孙凯,冯兰兰.一种模块化光伏发电并网系统[J].中国电机工程学报,2011,31(1):26-31.
[7] 王奎.无变压器多电平变换器拓扑及控制算法研究[D].北京:清华大学,2011.
[8] 王宝安,白晨阳,陈豪,等.基于CPS-SVPWM 调制的链式STATCOM 直流侧电压控制策略[J].高压电器,2015,51(12):168-173.
[9] 白晨阳.基于空间矢量调制技术的链式STATCOM的研究[D].南京:东南大学,2015.
[10] 商姣.基于模块化多电平变换器的高压变频装置研究[D].南京:东南大学,2013.
[11] 徐千鸣,罗安,马伏军,等.谐振滤波型模块化多电平换流器低频控制方法[J].中国电机工程学报,2016,36(2):489-498.
[12] ANTONOPOULOS A, ANGQUIST L,HARNEFORS L,et a1. Optimal selection of the average capacitor voltage for variable-speed drives with modular multilevel converters[J].IEEE Trans. on Power Electronics,2015,30(1):227-234.
[13] 何立群.模块化多电平变换器MMC的环流谐波抑制及低频运行研究[D],武汉:华中科技大学,2015.
[14] HAGIWARA M,HASEGAWA I,AKAGI H.Startup and low-speed operation of an adjustable-speed motor driven by a modular multilevel cascade inverter (MMCI)[C]//2012 IEEE Energy Conversion Congress and Exposition(ECCE),Raleigh,USA,2012:718-725.
[15] WANG K,LI Y,ZHENG Z,et al.Voltage fluctuation suppression method of floating capacitors in a new modular multilevel converter[C]//Energy Conversion Congress and Exposition (ECCE).Phoenix,AZ:IEEE, 2011:2072-2078.
[16] 雷鸣,李耀华,葛琼璇,等.模块化多电平变流器低频控制策略[J].中国电机工程学报,2013,33(24):59-65.