GPS-RTK技术在水文断面上小区域测量精度的研究
2017-04-28张景鹏
张景鹏
(辽宁省阜新水文局,辽宁阜新123000)
GPS-RTK技术在水文断面上小区域测量精度的研究
张景鹏
(辽宁省阜新水文局,辽宁阜新123000)
本文针对小区域内GPS—RTK测量定位的精度和可靠性问题展开分析与研究,通过对静态的测量成果与同名RTK点的测量实验数据进行比较分析,研究了RTK在小区域内观测成果的可靠性、稳定性及精度,分析了RTK在小区域测量中实现高精度测量的技术可行性,总结出了RTK在小区域测量中的一些经验。
GPS-RTK;可靠性;稳定性;精度分析;小区域
0引言
水文站断面测量与地形测量是水文流量测验工作的重要组成部分,可以说断面测量和地形测量的精度直接关系到流量测验精度,所以提高测量精度成为当前为水文断面测量提供有效数据的有力措施,而当前各水文站普遍采用水准仪进行断面测量,不仅局限于河床地势影响,也局限于人力因素受制。
RTK即实时动态差分法定位技术,是一种新的GPS测量方法。以前的GPS测量方式(如:静态、快速静态、动态测量)都需要在事后对其所采集的数据进行解算才能得到厘米级的高精度,而RTK却是能够在野外实时获得厘米级的定位精度,极大地提高了外业作业效率。
若GPS-RTK小区域测量精度能满足要求,将其引入水文断面测量中就能实现断面测量的高精度、高效率。
1 主要目标
RTK测量结果的精度高低直接影响着其应用范围的大小,所以对GPS-RTK测量达到更高精度的影响因素进行分析研究,对推广其在水文断面测量的实践应用也有一定的现实意义。文中研究的目标是:
1)通过对实验数据的总结分析,提出在小区域内控制GPS-RTK测量误差的途径;
2)得出断面测量小区域内RTK高精度测量定位的方法和操作流程;
3)通过实验来验证RTK在小区域内测量成果的稳定性及可靠性。
2 研究内容
本文将主要研究在小区域内已知高精度的控制网下,利用RTK对控制点进行测量,通过对RTK测量过程中的各个流程进行系统地分析和整理,然后对其测量成果进行精度的检测与分析,最终得出GPS-RTK在小区域内高精度定位的可行性论证。影响RTK测量精度的因素主要体现在:GPS-RTK系统自身对测量精度的影响、卫星信号的影响、流动站距和基准站之间的基线长度的影响。
综上所述,在总结前人成果的基础上,本文就GPS-RTK技术在小区域测量中的精度进行了深入的探讨和研究。主要研究内容包括:
1)通过实例对小区域环境里,不同时间、不同时间段、不同位置、不同天气等各种观测条件下GPS-RTK测量的可靠性、稳定性进行探讨和分析。
2)实际测量时,在小区域短基线GPS-RTK测量条件下,采取将全部点参与计算的方式将实验所要用的4个参数求解出来,剔除残差较大的点,最终获得适合本区域的最优转换参数。
3)用RTK测量的点的三维坐标与已知数据进行对比、检测分析,从而来分析RTK小区域测量成果的质量。
2.1 统组成
GPS-RTK由3个独立的部分组成:
1)基准站。主要包括基准站的GPS接收机及卫星的接收天线、无线电数据链电台及信号发射天线、直流电源等。基准站一般都架设在地势较高且无太多遮挡物的地方。其作用是对范围内的所有可见卫星进行观测,并将观测到的各种数据通过数据链实时地传送给流动站。
2)流动站。包括1台GPS接收机、1个GPS天线、无线电台及通讯天线、电源、手簿(PDA)、对中杆等组成。其作用是同时接收来自基准站和相同卫星的各种信息,包括基准站所传来的各种观测量、所有可视卫星的状态和基准站的WGS-84坐标。
3)用户设备部分。接收来自GPS卫星所发射来的信号,来获得导航和定位所需的必要信息,数据经过自动处理,从而来完成导航及定位工作。GPS接收机硬件包括主机、天线和电源。
2.2 测量原理
RTK又称载波相位实时动态差分技术,是基于载波相位观测原理的实时动态定位技术。它的两个主要组成部分:基准站的作用是连续地把观测到的卫星数据通过数据链发射出去;流动站的作用是实时地对基准站和流动站的载波相位观测值进行差分处理,并且获取流动站当前所在点的坐标、精度指标及高程,从而实时地提供测站点在指定的坐标系中的三维定位结果,并使精度达到厘米级。
其工作原理:首先,将1台GPS接收机安置于选择好的基准站上,另1台或几台GPS接收机安放于载体(流动站)上,基准站和流动站同时开始接收相同时间、相同的GPS卫星所发射出的信号。然后,基准站实时地将其测量计算出的载波相位观测值、伪距观测值以及基准站的坐标等信息通过电台,以无线电的方式传送给运动中的流动站,而流动站通过无线电台接收来自基准站的各种信息,实时地对其所接收到的载波相位观测值进行差分处理,从而得到基准站和流动站间的基线向量(△X,△Y,△Z);所得到的基线向量加上基准站的坐标便可以得到流动站每个点的WGS-84坐标,再通过坐标转换参数转换计算得出流动站每个点的平面坐标X,Y和正常高h。
RTK作业模式主要包括:
1)快速静态测量。这种模式下,GPS接收机必须静止在用户站上进行观测。在观测过程里,连同接收到的基准站的同步观测数据,实时地进行整周未知数和用户站的三维坐标的解算。在此期间,用户站上的GPS接收机在流动时,可以不必保持对GPS卫星的连续跟踪。
2)动态测量。与前面的模式相同,首先要静止地观测几分钟,然后进行初始化,成功后,运动的接收机便开始以预先设定的时间间隔进行数据采集,并确定其所在的位置。但是在其流动的期间,必须保持对GPS卫星的连续跟踪。而且,GPS常规的测量方法都需要在事后对数据进行解算才能获得厘米级的高精度,而GPS-RTK却能够在野外实时地获得符合要求的定位精度的测量方法,它采用了载波相位动态实时差分的方法,其现在已被广泛地应用在控制测量、地形测图、工程放样、海洋测绘(主要有海上定位、海洋大地测量和水下地形测量等),RTK极大地提高了这些工作的外业作业效率。
3)准动态测量。在其流动期间,必须要保持对GPS卫星的连续跟踪,否则就要重新进行初始化。
GPS-RTK测量首先是将1台接收机安置在已知点上对范围内的可视GPS卫星进行观测。然后,将采集到的载波相位观测量通过基准站的电台,以特定的载波形式发射出去,而流动站则是在对GPS卫星进行观测并采集自身的载波相位观测量的同时,也通过流动站的接收电台接收来自基准站电台所发射出的信号,经过解调得到基准站的载波相位观测量;流动站的GPS接收机再利用OTF(运动中求解整周模糊度)技术,根据基准站的载波相位观测量和其自身的载波相位观测量来求解出整周模糊度,最后求出流动站的位置,并获得厘米级的高精度,具体过程见图1。

图1 GPS RTK数据流程示意图
3 RTK定位精度及可靠性分析
3.1 数据的获取
本文实验所测得点为阜新市韩家杖子水文站控制点,其已知坐标见表1。
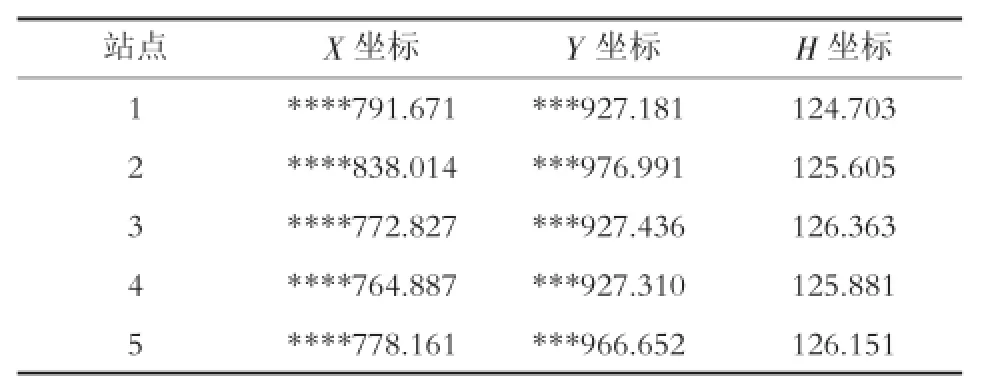
表1 水文站控制点已知坐标
3.2 精度分析
3.2.1 同一时段内对同一点多次测量的实验及成果精度分析
1)实验概况
此次实验是将基准站建立在周围比较开阔的地方,然后用RTK测量这些已知点的坐标。实验地点是阜新市韩家杖子水文站,视野比较开阔,而且已知控制点满足实验要求。
2)实验步骤:
①选一片开阔的区域,将基准站架好。启动手簿将其与基准站蓝牙连接,按需将其与本实验相关设置调好,然后断开手簿与基准站的连接。
②将流动站开机,在其初始化完成后,将手簿与基准站通过蓝牙连接。完事后,依次点击“工程—新建工程”,在出现的界面中输入工程名称,点击确定。然后进行以下步骤:点击“配置—坐标转换参数设置”,在出现界面的投影一栏下,将其中央子午线改成阜新所在的123,再点击确定;依次点击“配置—主机设置—仪器设置”,出现的界面中选中流动站,将其配置参数按要求设置。
③求取转换参数。由于水文站断面内地势平坦,且测区面积较小,因此测区的坐标平面转换参数和高程拟合参数直接用接收机手簿里自带的计算软件分别按四参数法和平面拟合法求得。点击“输入—求取转换参数”,在出现的页面中点击增加,将要求取转换参数所需的点(201,201-4,201-5)的坐标增加进去,并在每个点上实际获取一遍各个点的坐标,即完成了转换参数的求取。之后就可以开始对各个点进行RTK测量。
④分别在两天的相同时段对点进行坐标数据的采集。在采集点的数据时,当手簿上显示所测点的精度已经达到固定解的时候,即可保存改点的数据,然后再次对此点进行重复测量,当精度达到时就保存数据,并依此进行其他各个点的测量,直到所有点观测完成。其他几个时段亦是如此。
3)精度评定及结论
对RTK在同一时段对点进行的重复测量成果与已知点的坐标进行对比分析,结果见表2,其中△X,△Y,△H分别表示已知值和RTK重复测量得到的点的横坐标和纵坐标的差值以及高程的差值。
由表2数据可看出测点1—5X坐标的差值(绝对值)最大值分别为0.018,0.017,0.018,0.016,0.019 m,Y坐标的差值(绝对值)最大值分别为0.017,0.038,0.011,0.006,0.018 m,点位误差(绝对值)最大值分别为0.025,0.038,0.019,0.016,0.019 m,H坐标的差值(绝对值)最大值分别为0.048,0.045,0.047,0.048,0.044 m。
计算可得RTK测量1—5点的点位精度Ms=±0.016,±0.030,±0.015,±0.010,±0.014 m;

通过以上RTK重复测量结果与已知数据的比较,可得到RTK观测的稳定性很好,测量的成果很可靠。在保证有较好的观测条件下,RTK在小区域内的测量成果坐标精度都在5 cm以下,重复测量效果很好,RTK小区域内测量成果的精度较高。
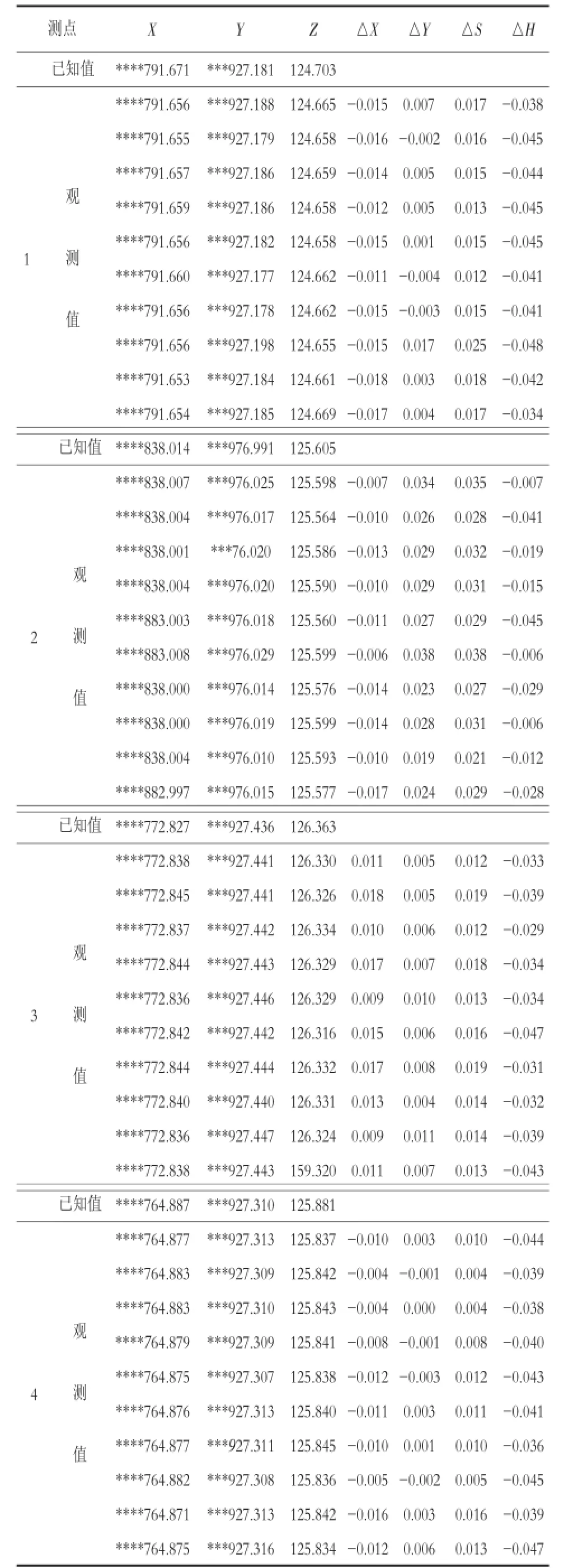
表2 不同测点重复测量与已知数据对比m

续表2不同测点重复测量与已知数据对比m
3.2.2 不同时间段对相同点进行多次测量的实验及成果精度分析
1)实验概况
此次实验是将基准站建立在周围比较开阔的地方,然后用RTK测量这些已知点的坐标。
2)实验方法
首先,每次实验都将基准站、流动站的配置参数设置成实验所需,然后分别在7月24日、7月28日的上午、下午两个不同的时段进行点的数据采集,并将其保存下来。
3)精度评定及结论
同一天的不同时段所测数据及不同天的不同时段数据的精度分析见表3。
通过对表3中数据的精度分析可以看出,在上午和下午两个时段,时段对小区域RTK测量的影响并不是那么的显著,但也是不能将其完全忽略。从上述分析中可以看出在RTK定位时,时段对其是有影响的但并不能影响RTK的高精度测量成果。文中上午和下午两个时段的实验所采集的数据稳定性、可靠性还是较高的。所以,认为RTK在正常情况下,不同时段内的测量结果是稳定、可靠的,其可持续提供高精度的测量成果。
4 结语
本文主要研究了GPS-RTK的定位原理、在小区域内测量的成果精度等,并通过实验的方法检验了GPS-RTK在小区域内的定位精度,其主要结论可以归纳为以下几点:
1)通过对RTK测量的结果和阜新市韩家杖子水文站的复测控制点进行比较,可以得出RTK小区域内测量成果可靠,观测的稳定性很好。在正常情况保证有较好的观测条件下,RTK在小区域内的测量在平面坐标上的较差都在5 cm以下,部分平面坐标的较差还在毫米级。因此,RTK在断面测量中的精度较高。
2)在小区域内进行RTK测量时,大量的树木、高压线、高大的建筑物、大面积水域都会对RTK的测量成果有一定的影响,所以在进行RTK观测时要尽量避免大量的树木、高大的建筑物、大面积水域、高压线这些对测量成果造成影响的因素,以提高RTK在小区域内测量的精度。
3)在进行测量时,要待观测卫星的图形强度较高时采集数据;其次,作业员的责任心要强,并且观测的成果要注意检核。这些也是保证GPS-RTK小区域测量精度的因素,要严格遵守操作规程。

表3 相同日期不同时段观测结果分析m
[1]水文测验手册[R].
[2]包民先,高玉良,陆建雄.提高RTK平面控制测量精度与可靠性试验研究[J].北京测绘,2010(04):65—67.
[3]徐仁广.多路径效应影响下GPS-RTK测量精度的分析[J].测绘与空间地理信息,2014(2).
[4]张天红,黄金鑫.GPS-RTK测量精度探讨[J].科技风,2015(13):4.
[5]王炎.提高GPS定位技术高程侧量精度的要素及方法[J].北京侧绘,2012(2).
[6]辽宁省水文条例[S].2011.
[7]张文艳,徐万祥,李红征,逢锦光.RTK测量转换参数的求取[J].测绘通报,2012(增刊):90—92.
[8]马捷.提高GPS-RTK测点精度和可靠性的探讨[J].中州煤炭,2006(2):17—19.
P332;P335
B
1002-0624(2017)04-0021-05
2016-11-18
