汤河水库坝体水平位移观测方法分析
2017-04-28刘丹
刘丹
(辽宁省汤河水库管理局,辽宁辽阳111000)
汤河水库坝体水平位移观测方法分析
刘丹
(辽宁省汤河水库管理局,辽宁辽阳111000)
坝体水平位移观测,是汤河水库一个重要的监测项目,是分析坝体运行情况的重要手段。2014年汤河水库对原有观测系统进行改造,观测仪器及观测方法同时更新。本文对比分析了更新前后的观测方法及精度,并探讨了观测数据的衔接问题。
水平位移监测;视准线法;全站仪法;汤河水库
1 概况
汤河水库是一座以防洪、城市和工业供水、农业灌溉为主,结合发电、养鱼等综合利用的国家大(2)型水利枢纽工程。坝体为粘土斜墙砂壳坝,分别在防浪墙、坝坡共计布设17个位移观测标点,用以监测坝体的变形情况。其中,在防浪墙顶布设8个标点,即C1-C8;在坝体下游坡面分别于桩号0+100,0+220,0+340坝段布置3个观测断面,共计9个标点,即B1-B9。
2 观测方法分析
汤河水库主要采用视准线法和全站仪坐标法进行观测。
2.1 视准线法
汤河水库采用视准线法通过N3型经纬仪进行水平位移观测时,分4个断面进行,路线为:E1-C1-C2-C3-C4-C5-C6-C7-C8-E5;E2-B1-B4-B7-E6;E3-B2-B5-B8-E7;E4-B3-B6-B9-E8。
点E(1—8)分别是各条基准线的基准点,是水平位移的观测基点,分别位于坝体东西两端的山体上。以第一条观测线路为例,观测时,将N3经纬仪置于坝体西侧山体上的基准点E1,后视觇标置于坝体东侧山体上的基准点E5,形成视准线,然后将移动觇标置于各观测点C1—C8,通过读取读数,计算出各观测点到E1-E5视准线的距离,通过前后2次观测的距离,算出间隔时间内各观测点的水平位移量。
1)优点。视准线观测法原理简单,简便实用。汤河水库自建坝开展位移观测项目起,一直采用视准线法,使用经纬仪进行坝体水平位移观测。直至2014年汤河水库进行除险加固工程,对原有观测基点进行了改造,并引用了新的观测仪器和观测方法。
2)不足。在采用视准线法观测水平位移时,影响观测精度的因素较多,主要有仪器自身的误差和人为误差。以第一条观测路线为例,观测时,观测人员通过放置在E1点的N3经纬仪照准放置在E5点的后视觇标,形成视准线,记录人员在C1-C8各观测点活动移动觇标,待移动觇标中线对准视准线时,观测人员通过对讲机告诉记录人员,此时记录人员读取移动觇标上的数值。该数值与前一次观测所测数值之差,即为前后2次间隔时间段内观测点的水平位移值。在此观测过程中,视准线长度、照准精度、大气折光等都能影响观测的精度,另外通过对讲机下达指令来停止转动觇标螺旋,经常会有时间延迟,导致读数有较大误差。
2.2 全站仪法
汤河水库坝体除险加固工程中对坝体观测点进行了重新改造,观测仪器由原来的N3型经纬仪更换为TS30型徕卡全站仪,观测方法由原来的视准线法改为全站仪法。
观测路线为:E7-C8-C7-C6-C5-C4-C3-C2-C1-B1-B4-B7-B2-B5-B8-B3-B6-B9。观测时将全站仪放置于已知坐标点E7,以另一已知坐标点E1为后视点。由于TS30型徕卡全站仪为高精度智能型全站仪,具有电子驱动、目标自动搜索功能,因此在E7点上人工建立测站以后,其余测量工作均由仪器自动完成,测量过程中仪器自动搜索观测点、自动瞄准、自动读数,在一测回观测过程中半测回结束后仪器可以自动进行倒镜测量,仪器观测结果为各观测点距E7的方向角和距离。观测结束后,通过全站仪内业软件进行平差以及数据处理,将斜距转化为平距,计算各点坐标。
与传统的视准线法观测坝体水平位移相比较,采用TS30型徕卡全站仪进行观测有如下优点:
1)误差小、精度高。采用TS30型徕卡全站仪观测,直接将精密棱镜置于位移观测点的预埋件上,仪器自动观测、瞄准、读数,避免了人为瞄准及人工读取移动觇标的读数误差;同时,徕卡TS30为超高精度全站仪,测角精度为0.5",有棱镜模式下测距精度为0.6 mm+1 ppm,自动目标识别定位精度为1 mm,因此大大提高了坝体水位位移变形观测的测量精度。
2)工作效率高。采用视准线法通过N3经纬仪进行坝体水平位移观测时,共分4条视准线进行,其中共需整平对中N3经纬仪4次,且根据精度需要在测量过程中需进行倒镜重新整平对中;后视觇标放置4次;观测中移动觇标需逐个放置于各观测点进行观测,共观测17次。测量工作耗时较长,效率较低。采用TS30型徕卡全站仪观测,将17根精密棱镜分别放置于观测点的预埋件上,首先对全站仪整平对中,对准后视、建立测站后,仪器自动观测、瞄准、读数,自动计算观测结果,观测过程省时省力,大大提高了工作效率。
3 观测数据的衔接
汤河水库自1986年9月首次进行坝体水平位移观测起,每年进行2次观测,汛前汛后各1次,至2013年底除险加固工程前,汤河水库进行坝体水平位移观测共计55次,均采用视准线法进行,通过读取移动觇标读数,计算此次读数与原始读数之差,即为观测点垂直于视准线(即坝轴线)方向上的水平位移累计位移量(见表1)。2014年除险加固工程后,各观测点以及工作基点均进行了调整,且采用全站仪进行观测的结果为各观测点距E7点的方向角及距离,因此需要通过计算,将全站仪的观测结果转换为各点坐标值,同时计算出各观测点垂直于坝轴线的位移量,即坝体水平位移量(见表2)。确保汤河水库坝体水平位移观测资料连续完整。
通常判断坝体水平位移的变化情况主要根据2个数据,即间隔位移量和累计位移量。由表1,2可知,通过视准线法观测水平位移的观测结果,间隔位移量为各观测点此次觇标读数与上次觇标读数之差,累计位移量为各观测点此次觇标读数与原始觇标读数之差,移动方向垂直于视准线。通过全站仪法观测水平位移的观测结果,间隔位移量为各观测点此次距坝轴线距离(即轴距)与上次距坝轴线距离之差,累计位移量为各观测点此次轴距与初始轴距之差,(其中初始轴距为观测点改造后采用全站仪首次观测所得各点距坝轴线的距离),移动方向垂直于坝轴线。
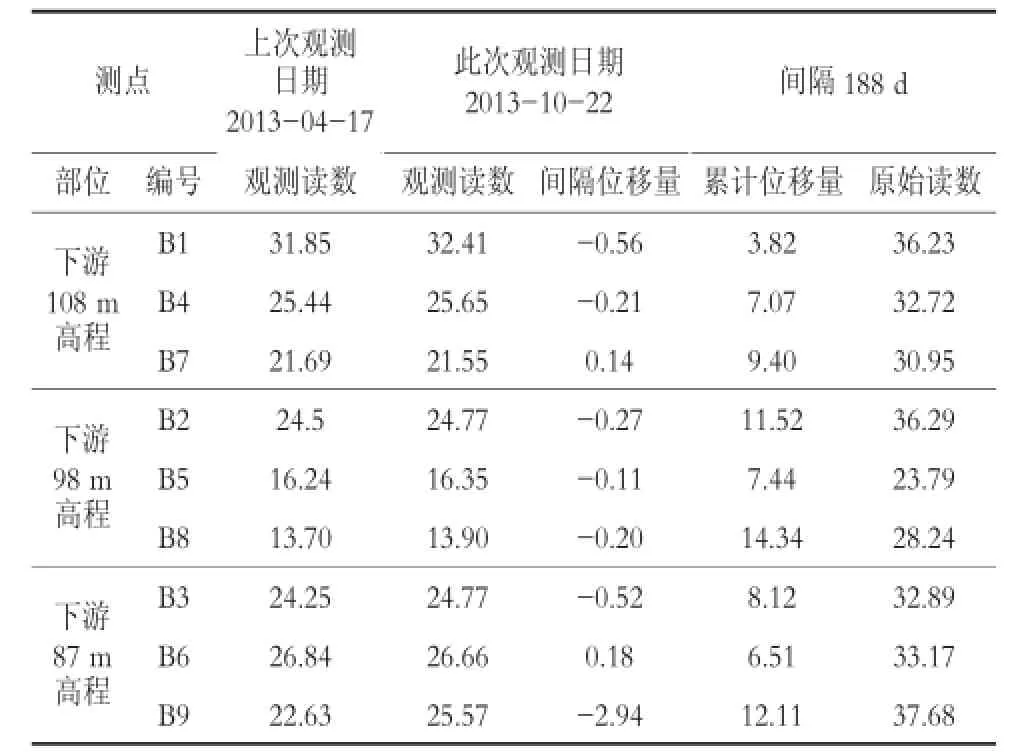
表1 视准线法观测水平位移量成果表mm
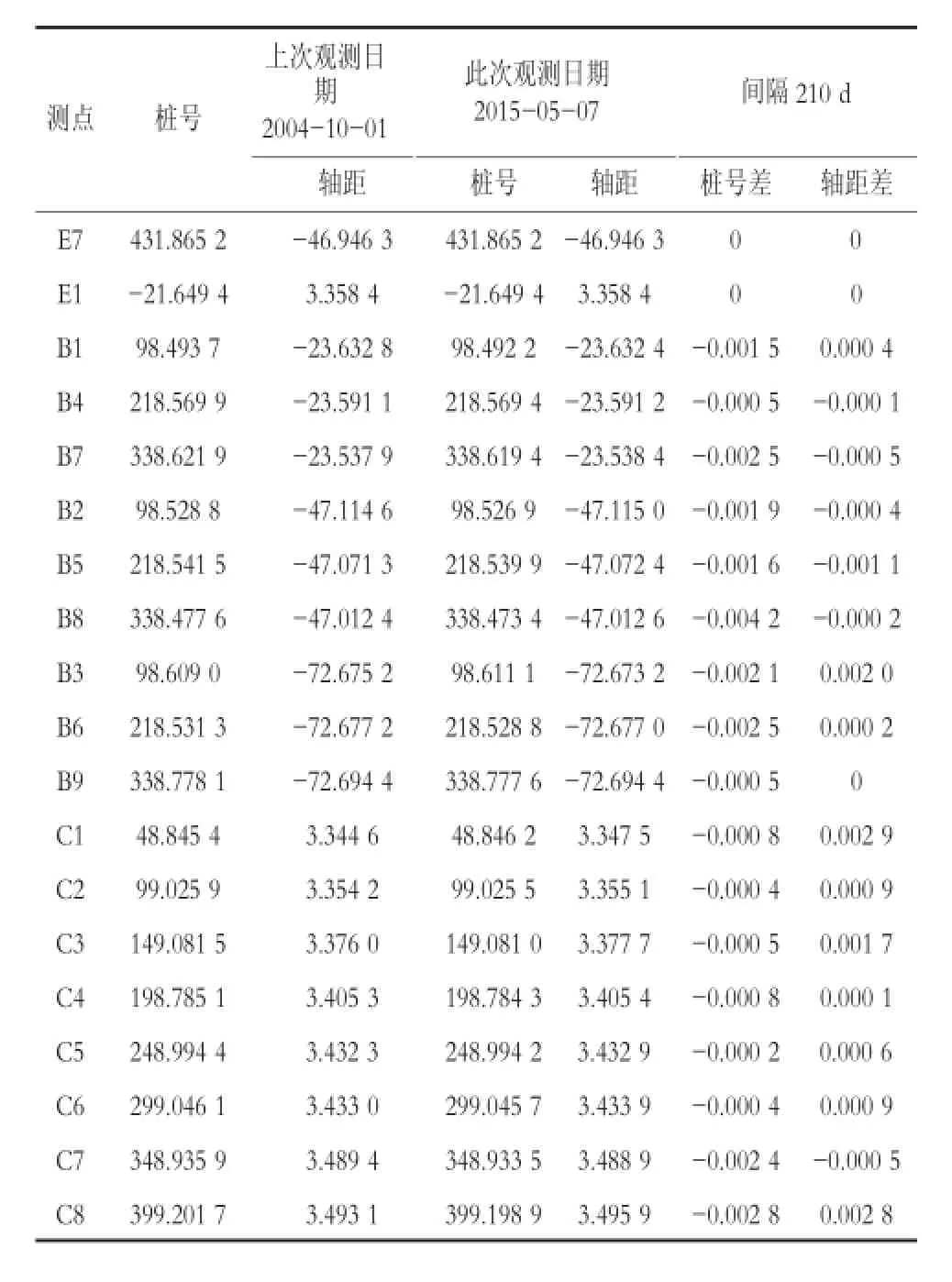
表2 全站仪法观测水平位移量成果表m
由于除险加固工程改造观测基点的施工过程中,未对改造前后的各观测基点进行及时观测,直至2014年10月对改造后的观测基点采用全站仪法进行了首次观测,因而导致了2013年10月至2014年10月期间坝体变形数据缺失。
通过坐标计算得出,视准线E1-E5、E2-E6、E3-E7、E4-E8均与坝轴线平行,各观测点改造前后所计算出的坝体水平位移量方向一致,因此建议坝体水平位移累计位移量采用两部分之和来计算,即截至2013年10月的累计位移量与2014年10月至此次观测的累计位移量之和。
4 结语
自2014年10月汤河水库首次采用全站仪进行坝体水平位移观测后,通过多次的实际观测发现,工作效率、数据精度等均照以往有较大程度提高,因此采用TS30型徕卡全站仪进行汤河水库坝体水平位移观测实用、可靠。
[1]汤河水库管理局.汤河水库志[M].北京:中国水利水电,2009.
[2]李春杨,牛焕文.莱卡TS30全站仪在桃山水库大坝水平位移观测中应用[J].黑龙江水利科技,2014(9):174-175.
TV697.2
B
1002-0624(2017)04-0062-03
2016-06-02