基于Haar小波变换的水下小型沉底人造目标分割方法
2017-04-28胡献君佟怡铄张江平
李 轲,胡献君,佟怡铄,张江平
(海军工程大学 a.电子工程学院; b.科研部,武汉 430033)
【信息科学与控制工程】
基于Haar小波变换的水下小型沉底人造目标分割方法
李 轲a,胡献君b,佟怡铄b,张江平b
(海军工程大学 a.电子工程学院; b.科研部,武汉 430033)
根据水下小型沉底人造目标在傅里叶变换处理中容易丢失原本就很少的细节特征、导致图像分割效果较差的问题,在统计分析图像目标特点的基础上,提出了用Haar小波变换对原始图像数据进行多分辨率处理以尽可能保留人造目标特征,然后在拟合指数型函数确定初始平滑区间的基础上,通过迭代的方式获得二值化阈值,根据图像中干扰物的特点提出了一种统计8邻域灰度信息的干扰抑制方法。利用前面得到的阈值进行二值化分割及一次中值滤波,就可得到较为满意的目标分割结果。
水下; 人造目标;图像分割;小波变换
小型沉底人造目标一般是近距离成像所得,因此目标在图像上具有一定的形态特征,也保留了部分细节,进行图像分割的难度小于远景目标,但因其体积较小或受泥沙掩埋,难以仅凭借外形轮廓特征将目标从海底背景中分离出来[1]。与此同时,小型沉底人造目标因其建造材质特点,在图像中表现为亮色区域,对于此类与周围背景的灰度差异较大的小目标,可以尝试利用图像的频域特征进行分析。但由于近距离成像,有部分海底反射了较强的光线,也在图像中形成亮色区域,干扰图像分割效果,因此在设计目标分割算法的同时必须将这类干扰区域滤除[2-3]。文献[1]根据水雷目标在声纳图像中的形状特征,采用Chan-Vese模型的演化思想,提出了一种基于超椭圆形状约束的多相水平集主动轮廓模型,实验结果显示对声纳图像中的水雷目标具有较好的识别效果,但是这种基于椭圆形状模型的算法设计限制了对其他形状目标的检测效果。文献[2]提出一种基于非下采样Contourlet 变换(NSCT)域边缘检测和区域生长的侧扫声呐图像分割新方法,在边缘检测时充分利用了 NSCT 域尺度内相邻子带的相关性以及噪声和边缘在不同方向子带系数之间的分布特性,将图像的大尺度行为和小尺度行为综合考虑,解决了边缘检出率和抑噪能力的矛盾。选择的模拟图像和实测数据中人造目标的面积较大,轮廓线和尖角特征明显,属于非常理想的目标对象,降低了目标分割的难度,但运算速度慢,工程应用价值不高。
长期以来,傅里叶变换一直是变换域图像处理的基石,方便研究者在频域上进行算法设计,但傅里叶变换只提供了频率信息,导致局部信息会在变换过程中丢失[4-5]。而小波变换具有变化的频率和有限的持续时间,它是一种信号的时间尺度分析方法,具有多分辨率的特点,且在低频部分具有较高的频率分辨率和较低的时间分辨率,在高频部分具有较高的时间分辨率和较低的频率分辨率,很适合探测正常信号中夹带的瞬态反常现象并展示其成分[6]。在这样的理论基础上,本文在设计算法时,为方便进行数字图像处理、提高处理速度,首先对图像数据灰度化处理;进行小波变换,取Haar小波的第二层,将LL与HH进行差分得到新图以锐化边缘信息,再进行类似高斯滤波;然后针对造成干扰的海底强光反射区域,采用局部亮块抑制技术对图像中的干扰亮区进行灰度抑制,并中值滤波,使目标边缘更加清晰;最后从灰度直方图中得到二值化阈值,用该阈值对图像进行二值化再配合相关简单处理,将感兴趣的人造目标从海底背景中分割出来。算法流程如图1所示。
1 Haar小波变换
如图2所示为高分辨率声呐的原始图像数据,首先要对其进行灰度化处理,再进行小波变换。这里采用简单实用的Haar小波做初步处理。Haar小波变换的基函数是最古老也是最简单的正交小波,其矩阵形式为:
T=HFHT
(1)
式中,F是一个N×N的图像矩阵,H是一个N×N的变换矩阵,T是一个N×N的变换结果。对于Haar变换,变换矩阵H包含Haar基函数hk(z),它们定义在连续闭区间z∈[0,1],k=0,1,2,…,N-1上,其中N=2n。为了生成H矩阵,定义整数k,即k=2p+q-1(这里0≤p≤n-1,当p=0时,q=0或1;当p≠0时,1≤q≤2p)。由此可得Haar变换的基函数:
(2)
且
(3)

图1 算法流程
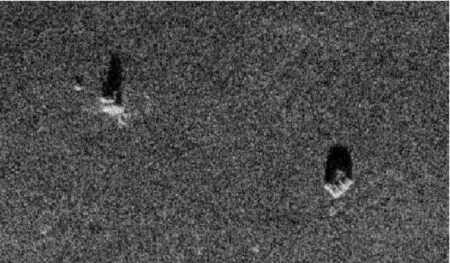
图2 原始图像数据
Haar变换矩阵的第i行包含了元素hi(z),其中z=0/N,1/N,2/N,…,(N-1)/N。例如当N=4时,k,p和q值如下:
kpq000101211312
那么4×4变换矩阵H4为:
(5)
Haar变换是离散的小波变换,使用Haar基函数对图像数据进行多分辨率分解后,所得结果除了包含有与原始图像同样的像素数外,还具有3方面的优点:① 局部统计数据相对稳定并较易给出数学模型;② 大多数值都接近0,利于进行后续图像压缩;③ 原始图像中的粗和细分辨率可以近似从中提取,即能够从处理后图像中找出比原始图像更多的特征细节[7-9]。
Haar小波得到的结果是缩小为原图1/4大小的四幅图(如图3所示),左上角小图表示原图均值滤波之后的效果,即原图的低频信息,保留了原图大量的信息;左下角是HL图(H代表横向高频信息,L代表纵向低频信息);右上角是LH信息,代表横向低频信息和纵向高频信息;右下角是HH信息,即横向和纵向均是高频信息[10]。需要指出的是:HH本质是对原图的所有邻域做了横向和纵向的减法,LL恰好相反,做了加法,相当于均值滤波的效果。然后将归一化(将像素点灰度值恢复到0到1之间,主要因为前面的加减运算会产生负值)的LL对应减去归一化的HH,得到边缘信息更加突出的目标图像。
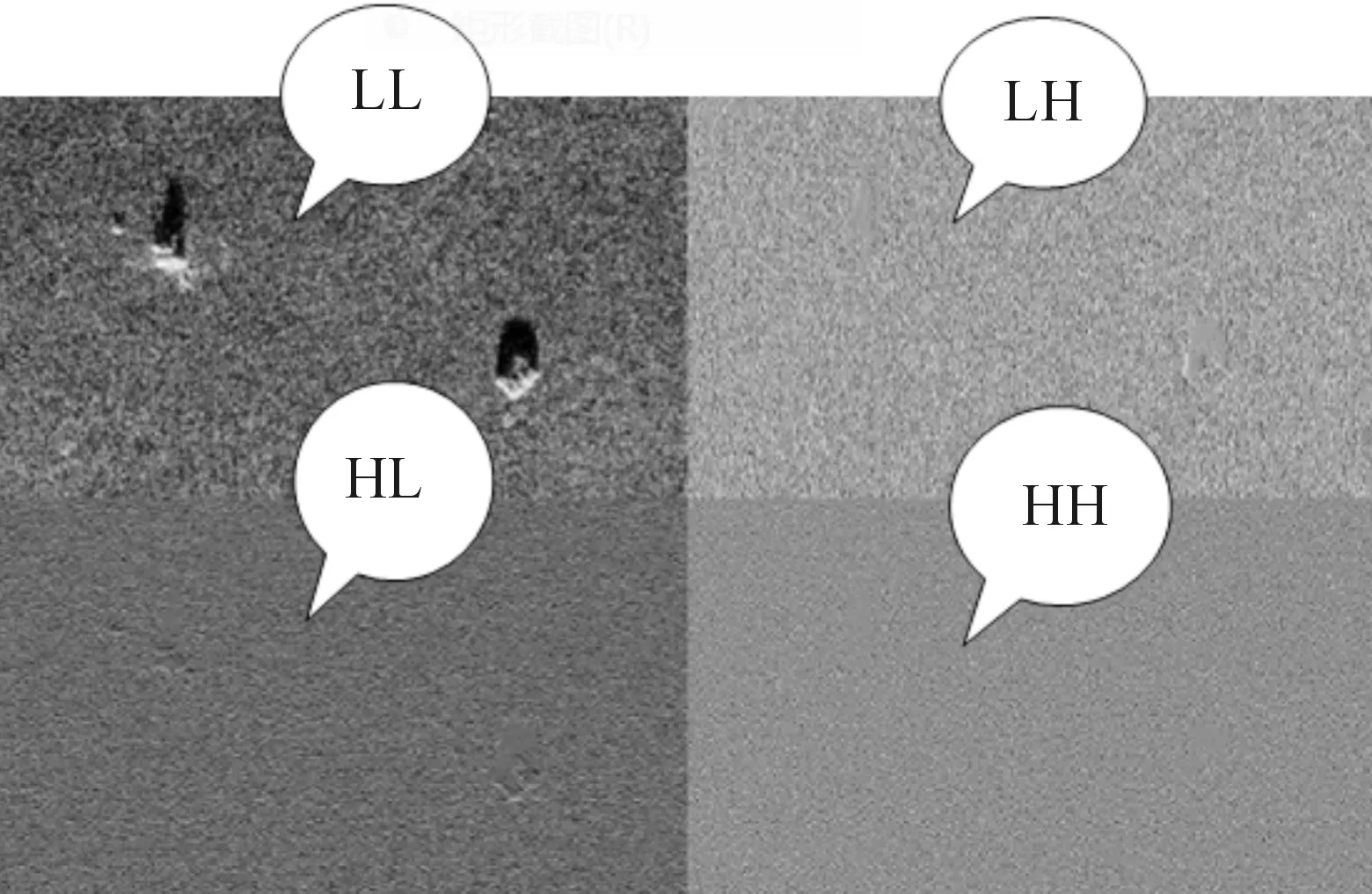
图3 Haar小波处理结果
假设目标为纯白灰度值是255,背景为纯黑灰度值是0,那么LL与原图像的差异只是尺寸区别,而HH图中除了目标边缘清晰可见,其他地方全部同色。因此用LL减去HH将更加突显目标的边缘信息(结果如图4所示)。为进一步突出目标边缘,本文所提算法进行了两次Haar小波变换,所以取的是小波变换的第二层(如图5所示)。
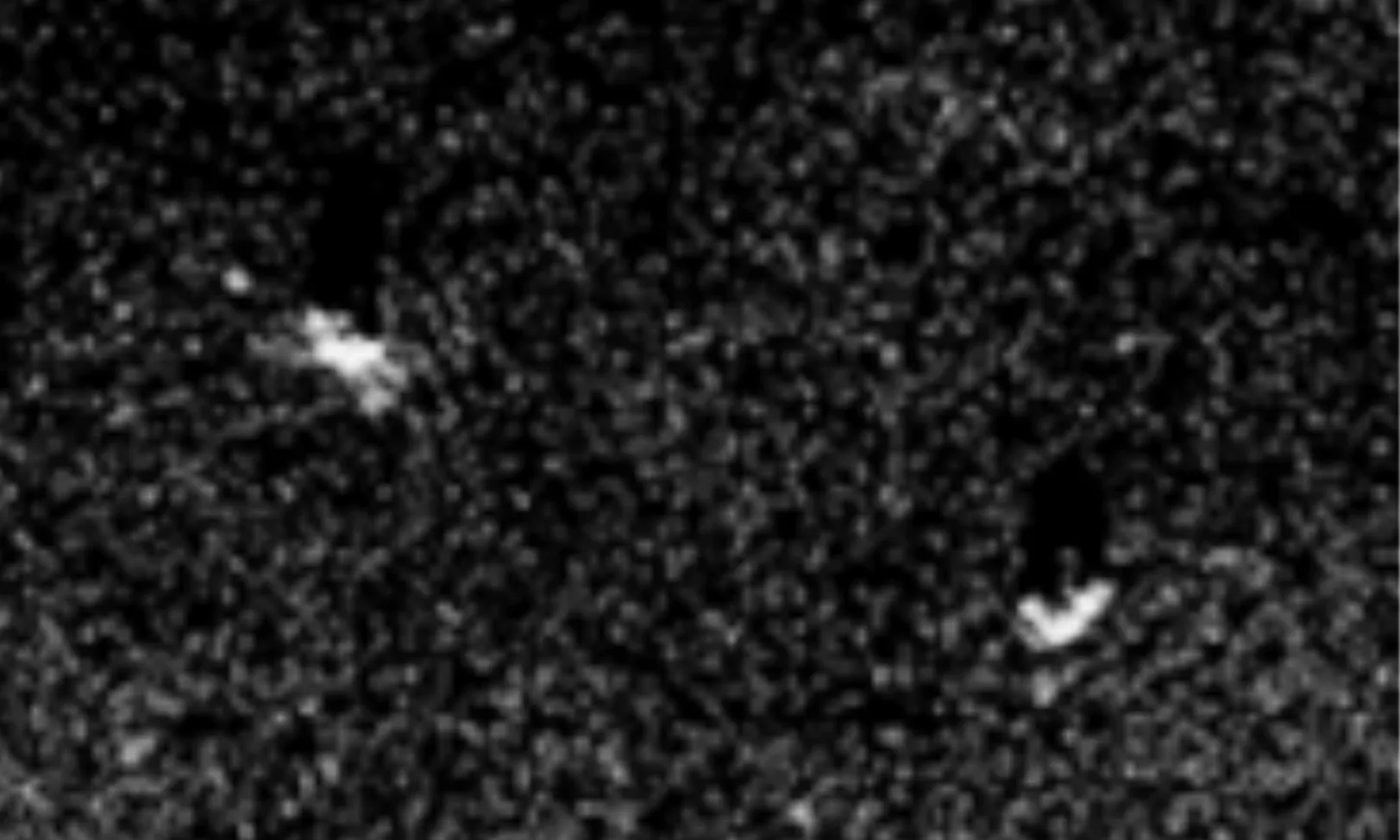
图4 LL减去HH的结果
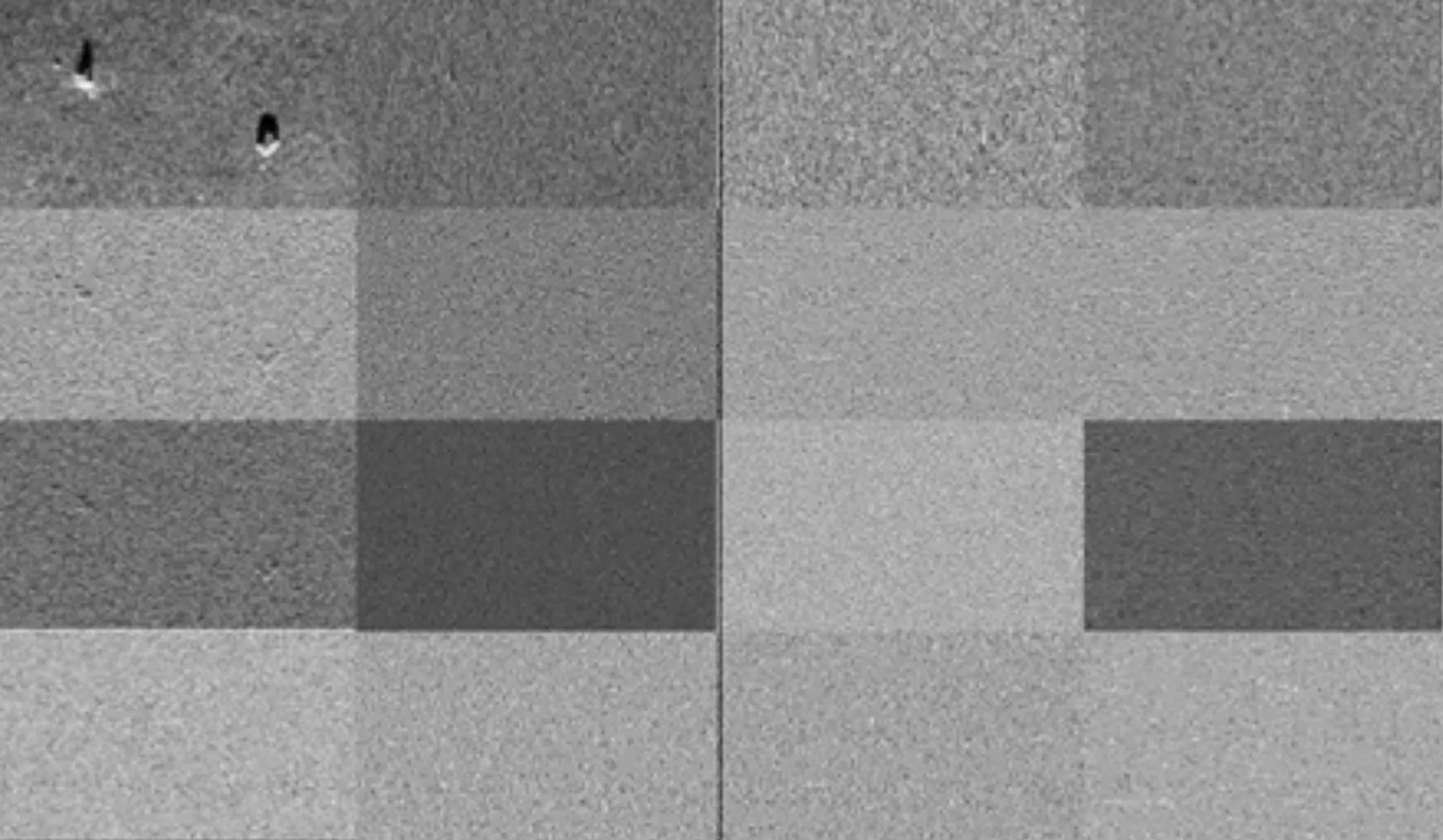
图5 Haar小波变换第二层
2 求二值化阈值
首先统计上一节经小波变换处理后的图像直方图,将图中所有小目标作为整体目标进行二值化,目标显示为白色。由于ostu算法的处理结果比较粗糙,这里针对每帧原始图像,经ostu算法处理后,再估计得到一个平均的直方图(如图6所示,图6分别是两帧目标图像的直方图)上的导数(例如dy/dx= 0.003/20,即纵坐标差值除以横坐标差值),最后将直方图上对应这个导数的灰度值作为二值化阈值。

图6 直方图
要求取直方图曲线上的导数,需要将直方图平滑处理。这里只对直方图峰值过后1/4处后面的曲线段进行平滑,因为二值化的阈值大多出现在此区域。平滑曲线的方法是:将初始曲线划分为等间隔的区间,将区间边界点取原来的值,区间上的值取相邻区间边界点作为直线线段端点的线段上的值。然后不断地将初始区间减半,之前的端点成为视觉上的折点,将折点作为新的区间的边界点,重复上面的过程。平滑过程如图7所示,图中的虚线和实线线条分别代表不同的间隔段,可以看到随着不断地迭代,间隔愈来愈小,最终得到平滑后的结果,如图8所示。
下面确定初始平滑区间。这里将峰值与峰值过后0.25倍峰值的灰度差和峰值量作为参照确定初始平滑区间。为了遵循曲线越陡,区间越细的原则,需要拟合成指数型的关系式,关系式的自变量refer为:
(6)
设峰值为PeakVall,直方图关系设为gray=f(p),p<1,p为灰度值小于gray的直方图曲线段下面的面积。函数值即是初始区间大小。拟合结果为:
nScale=50×0.8091×exp(-1766×refer)+3
(7)
根据多次测算,初始间隔一般在24的灰度差上下波动。
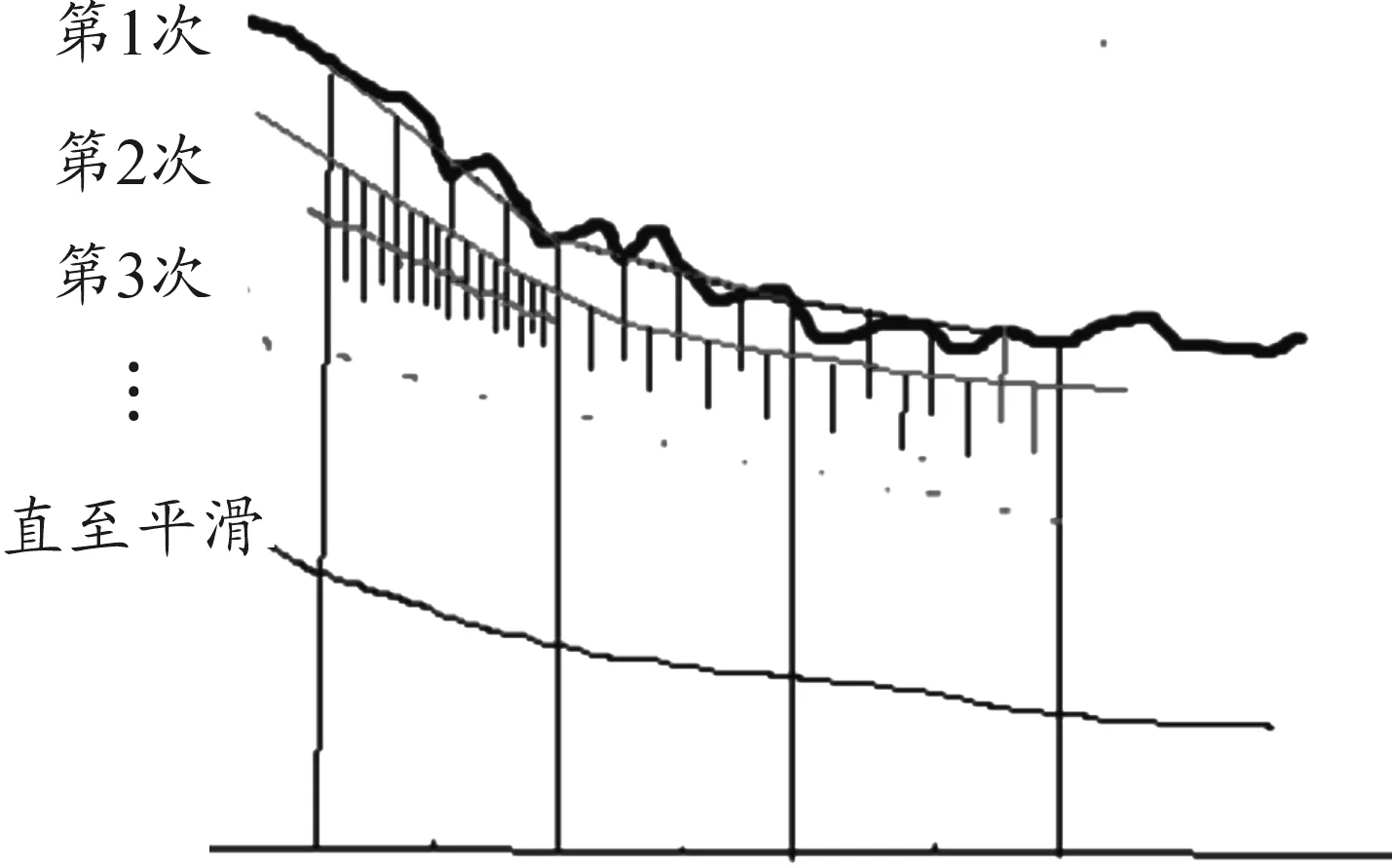
图7 平滑过程
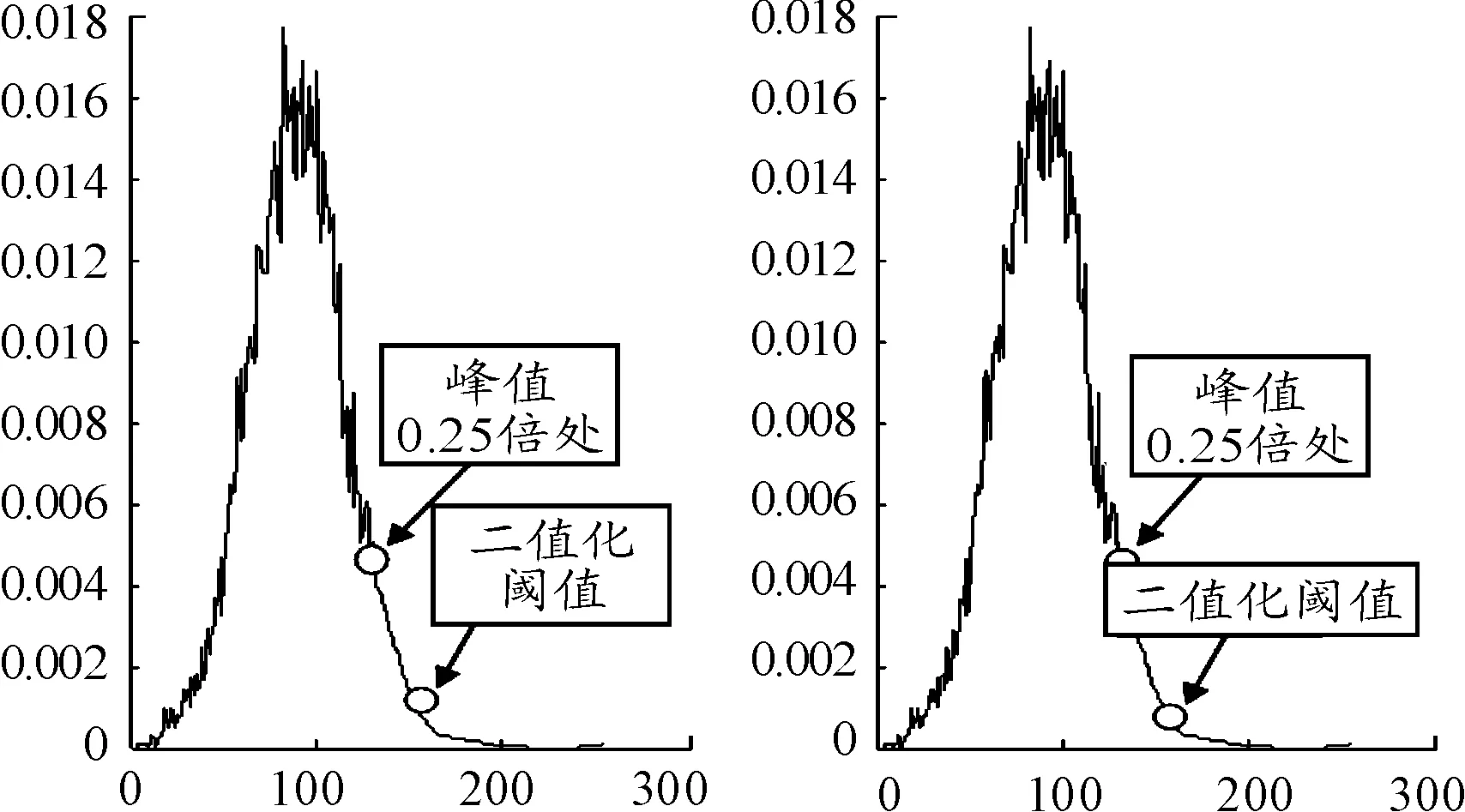
图8 最终平滑结果
对前面的处理结果进行类高斯滤波,即用一个3×3的掩模遍历图像中的每一个像素,用掩模确定的邻域内像素的加权平均灰度值替换模板中心像素点的值。掩模表达式为:
3 干扰抑制
在实验中发现,直接采用上节求取的阈值进行二值化会出现很多干扰点,原因是原图中存在大片干扰亮区,与目标亮度接近,如图9所示,在二值化处理后被保留下来,需要对其进行专门抑制。这里将图像划分为多个小方格(方格大小一般比目标大小稍大),统计每个方格的平均灰度,然后考察每个方格的8邻域,如果连续出现3块以上灰度相似的方格,就将当前方格的灰度值减半。灰度抑制后的效果如图10所示,图中那些成块的暗色区域就是被抑制过的区域。
根据前面计算出来的二值化阈值进行二值化处理,再进行一次中值滤波,即可得到最终的目标检测结果。本文中值滤波选用3×3的滑动模板,对8邻域范围内的像素值进行单调上升排序后选取中值替换当前像素点的灰度值。
图11和图12分别为两帧原始图像数据经本文所提算法完整处理后的结果。
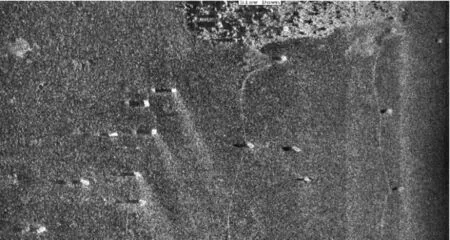
图9 含干扰亮区的声纳图像数据
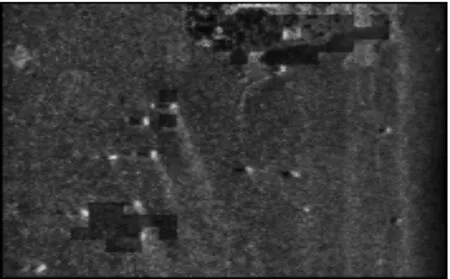
图10 灰度抑制后的处理效果
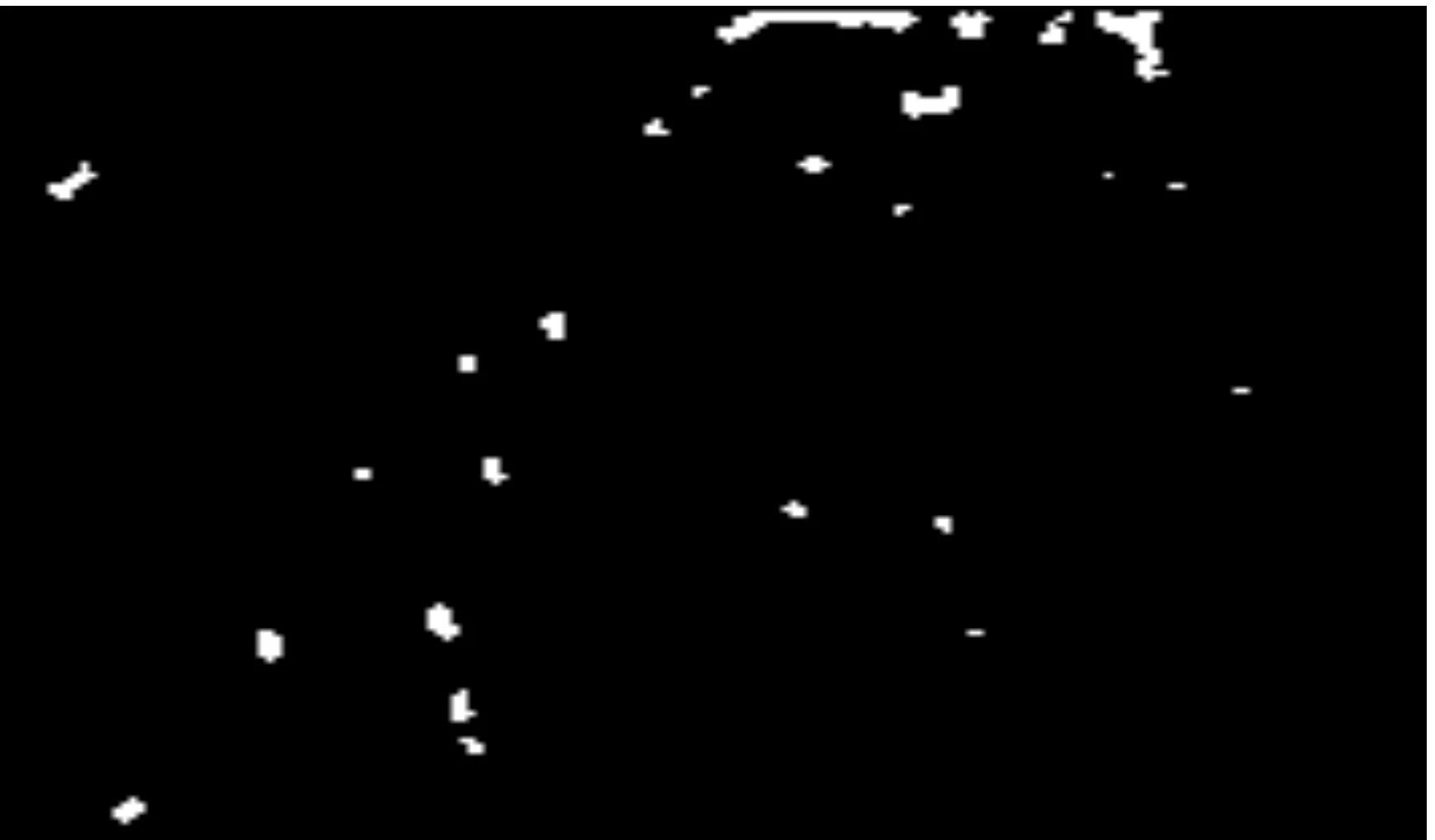
图11 本文算法处理结果1
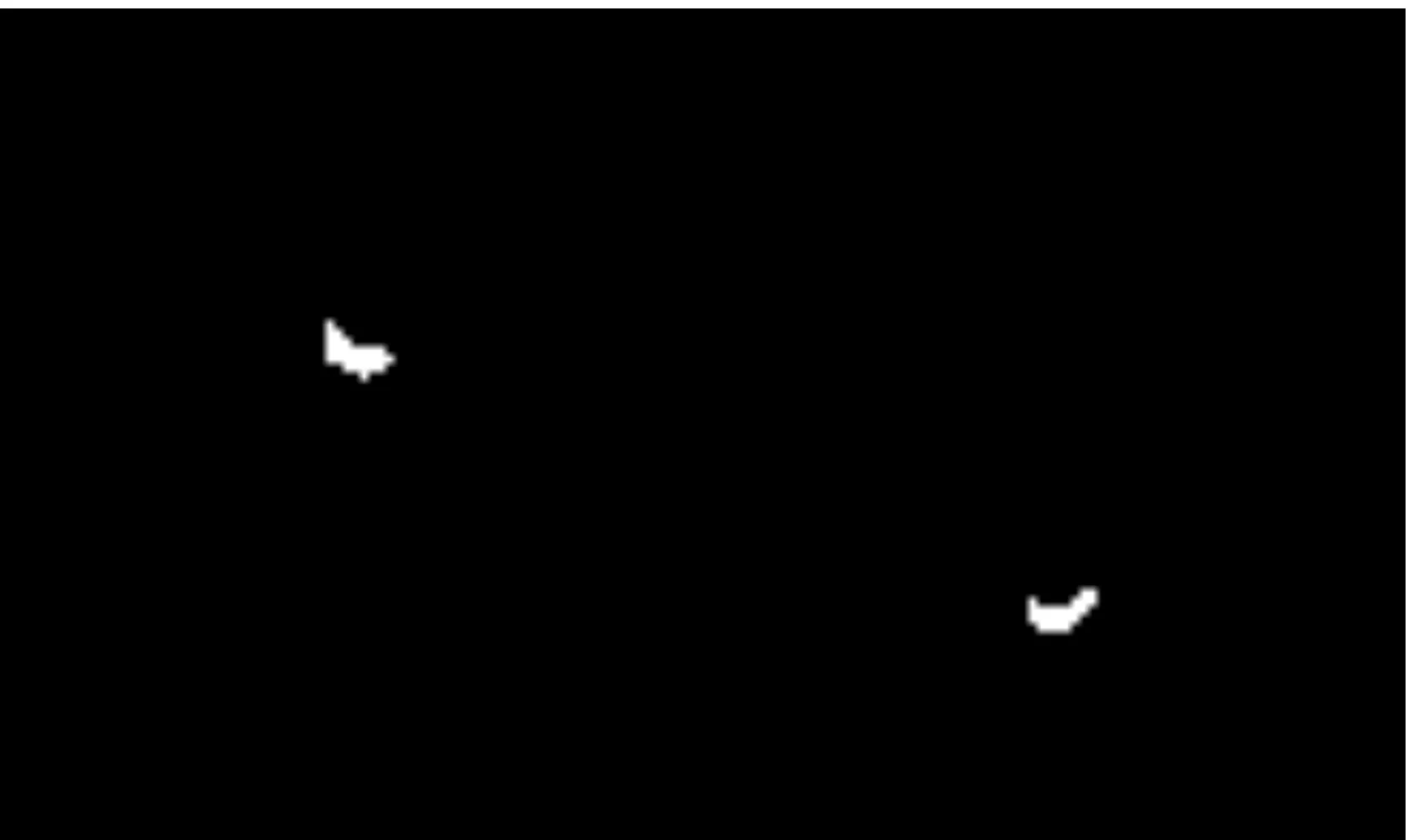
图12 本文算法处理结果2
为验证算法的工程应用前景,本文对单帧大小为464M,含8 800×5 560个像素点的高分辨率合成孔径声纳图像进行算法测试,记录系统内存的使用情况和运算时间,如果算法运行前后系统内存的使用维持在一个有限的范围内,则该算法稳定。计算机配置为Lenovo笔记本电脑1台,CPU:Intel(R)Core(TM)i5-3337U CPU @ 1.80GHz,内存:4.00 G (3.88 GB可用)。重复该运算200次,其中前20次内存使用情况和运算时间如下表所示。实验结果统计如表1所示。
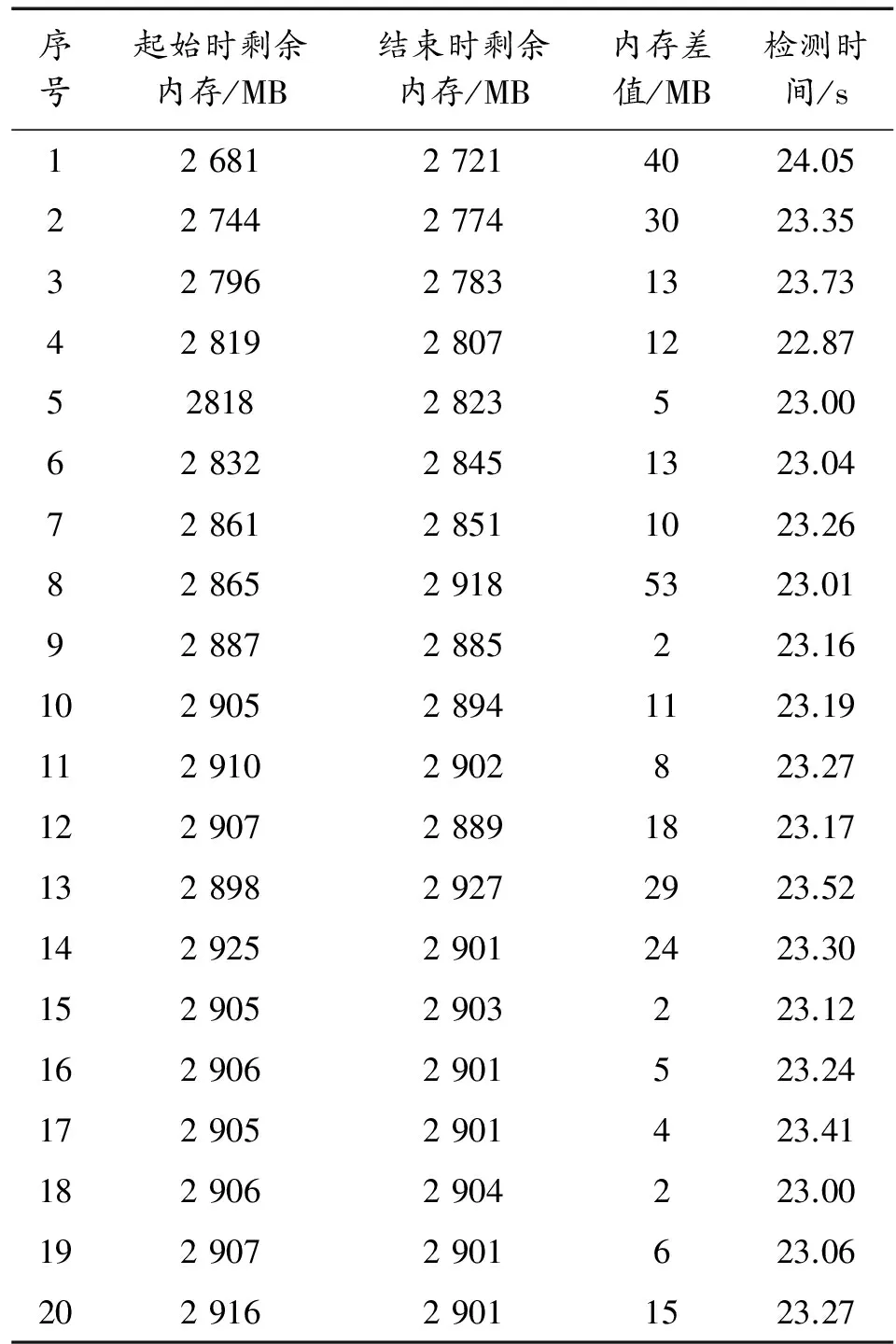
表1 实验结果统计
实验结果表明,算法运行前后系统内存保持在合理的区间范围内,说明算法稳定性较好。运算时间虽然达到23 s左右,但考虑到处理对象大小为464M,以及深海干涉合成孔径声纳系统实时成像时间较长,所以本文所提算法仍具有一定的工程应用价值。
4 结束语
本文所提算法是在Haar小波变换进行图像多分辨率处理的基础上,利用函数拟合与迭代确定二值化处理阈值,并进行了基于8邻域灰度统计信息的干扰抑制,从实验数据的处理效果来看,能够将小型人造目标从海底背景中提取出来,具备工程实践价值。由于此方法中二值化阈值是通过对直方图信息的统计得出的,对于采自同类数据源的图像具有通用性,但采自其他数据源的图像如果与此类图像出入较大的话,可能需要重新拟合数学关系确定二值化阈值。
[1] 李娟娟,马硕,朱枫,等.基于主动轮廓的声呐图像水雷识别方法[J].计算机应用研究,2014,31(12):3841-384.
[2] 李庆武,马国翠,霍冠英.基于NSCT域边缘检测的侧扫声呐图像分割新方法[J].仪器仪表学报,2013,34(8):1795-1801.
[3] 刘光宇,卞红雨,沈郑燕,等.基于规一化割的声呐图像谱抠图分割[J].哈尔滨工程大学学报,2012,33(3):308-312.
[4] 刘光宇,卞红雨,沈郑燕,等.基于声纳图像的水平集分割算法研究[J].传感器与微系统,2012,31(1):29-31.
[5] 赵广超,肖斌,国闯,等.小波分析理论与图像降噪处理[J].图形、图像与多媒体,2011,30(19):35-37.
[6] 桑恩方,沈郑燕,高云超.小波域声呐图像自适应增强[J].哈尔滨工程大学学报,2009,30(4):411-416.
[7] 孙红进.Haar小波在图像多尺度分解与重构中的应用[J].煤炭技术,2010,29(11):157-159.
[8] 徐志平,张海朝.基于 Haar 小波变换和分块 DCT 的人脸识别[J].图形、图像与多媒体,2009,21:25-28.
[9] 王乐佳,王欣.基于双 Haar 小波的边缘检测[J].山东大学学报(工学版),2004,34(2):35-37.
[10]RAFAEL C.GONZALEZ,RICHARD E.WOODS.Digital Image Processing[M].2nd Edition.Tennessee:Pearson Education,2002.
(责任编辑 杨继森)
Underwater Small Sinked Man-Made Target Segmentation MethodBased on Haar Wavelet Transform
LI Kea, HU Xian-junb, TONG Yi-shuob, ZHANG Jiang-pingb
(a.Electronics Engineering College; b.Science Research Department,Naval University of Engineering of PLA, Wuhan 430033, China)
In Fourier transform processing of sonar image, the fewer detailed features of the underwater small sinked man-made targets are always lost in result of poor target segmentation effect. On the base of statistically analyzing the features of this kind of image targets, a new target segmentation method was proposed. Firstly, multi-resolution processing of Haar wavelet transform was used to retain men-made target features as more as possible. Secondly, we fit an exponential function to confirm the initial smoothing interval and calculated the binarization threshold through iteration. Thirdly, according to the features of the interference around the targets, a statistical eight neighborhood grey information method was used to restrain these interferences. At last, the small man-made target could be segmented from the background by the above binarization threshold. Then after a median filtering, the processing result is satisfied. The proposed method is of high engineer value because of strong pertinence, stability and rapid calculating speed.
underwater; men-made target; image segmentation; wavelet transform
2016-10-29;
2016-12-05
2015年湖北省自然科学
基金项目“水下沉底人造目标自动检测技术研究”(2015CFB644)
李轲(1987—),男,博士,讲师,主要从事目标跟踪与识别研究。
10.11809/scbgxb2017.04.024
李轲,胡献君,佟怡铄,等.基于Haar小波变换的水下小型沉底人造目标分割方法[J].兵器装备工程学报,2017(4):109-113.
format:LI Ke, HU Xian-jun, TONG Yi-shuo,et al.Underwater Small Sinked Man-Made Target Segmentation Method Based on Haar Wavelet Transform[J].Journal of Ordnance Equipment Engineering,2017(4):109-113.
TP391.41
A
2096-2304(2017)04-0109-05
