空间飞行器动力学与控制研究综述
2017-04-28刘付成朱东方
刘付成,朱东方,黄 静
(1.上海市空间智能控制技术重点实验室,上海 201109; 2.上海航天控制技术研究所,上海 201109)
空间飞行器动力学与控制研究综述
刘付成1,2,朱东方1,2,黄 静1,2
(1.上海市空间智能控制技术重点实验室,上海 201109; 2.上海航天控制技术研究所,上海 201109)
概括介绍了近年来空间飞行器的动力学与控制研究的发展状况,综述了单星动力学建模和控制技术、多星动力学建模和控制技术,以及太阳帆航天器、绳系卫星等新型航天器动力学与控制技术等相关航天领域中的若干基础问题,总结了在这些领域中的研究方法及取得的成果。提出了相关领域中值得深入研究的问题及后续发展方向,如深空探测的轨道动力学、超大尺度柔性航天器的动力学建模与协同控制技术、敏捷卫星的机动控制技术、多星姿轨耦合动力学和控制技术、太阳帆航天器动力学与控制技术,以及空间绳系卫星系统的动力学与控制技术等重点和主要发展方向。
空间飞行器; 动力学; 轨道控制; 姿态控制; 刚体; 柔性; 姿轨耦合; 敏捷卫星; 太阳帆航天器; 绳系卫星
0 引言
空间飞行器从最初结构简易、功能单一的卫星发展到现在构型复杂、功能多样的卫星,在人类探索空间、认识宇宙的过程中承担了越来越重要的任务,并对人类的生产和生活产生了深远的影响。空间飞行器的动力学与控制技术是空间飞行器顺利执行空间探测任务的基础和保障,在航天技术发展中起着举足轻重的作用。随着空间探索任务的不断发展,空间飞行器的结构和功能越来复杂,技术发展越来越迅猛,涉及的领域也越来越多。空间飞行器动力学与控制的研究内容涵盖面非常广,本文从单星任务、多星任务,以及新型航天器任务出发,对每个任务领域涉及的动力学与控制技术进行了概括介绍,并对今后空间飞行器动力学与控制领域的研究内容进行了展望。
1 单星动力学与控制技术
本章介绍了单颗空间飞行器在轨执行任务时面临的轨道动力学、轨道控制技术、姿态动力学和姿态控制技术。其中:在轨道动力学和控制领域对近地轨道器和深空探测器两种任务层面进行了分析;在姿态动力学与控制领域对刚体航天器、柔性航天器等航天器本身特性进行了分析。
1.1 轨道动力学
1.1.1 近地轨道动力学
一般将近地轨道器(人造卫星)运动过程力学系统转为受摄二体问题[1]。对受摄二体问题,参考轨道采用开普勒轨道,实际运动则为缓慢变化的开普勒轨道,相应的运动状态,在任何时刻都可用瞬时开普勒轨道描述。该方法通常是利用常数变易法转为小参数方程,根据常微解析理论(邦加雷定理)构造所需的解析解。在常数变易中,基本参数通常是采用二体问题完整解中有明确轨道几何意义的积分常数,6个开普勒轨道要素(半长轴a,偏心率e,轨道倾角i,升交点赤经Ω,近地点幅角ω,平近点角M),经过常数变易后转为小参数方程对应的初值问题,小参数方程常见形式包括以摄动加速度表达的Gauss型、以摄动函数表达的Lagrange型和以正则共轭变量表达的Delaunay型等三类。对受摄二体问题满足的小参数方程,无论其具体形式,均可采用经典摄动法(或各种改进的摄动法)构造相应的小参数幂级数解。
航天器轨道计算通常有解析法(如拟平均要素法)和数值积分法(如Cowell法),解析法计算简单,但精度较差,而数值积分法特别是Cowell法精度较高,但计算量较大,因此需对模型进行简化以减少计算量[2]。
1.1.2 深空轨道动力学
深空探测器(探测大行星、小行星或自然卫星)的运动,主要力源是太阳,或太阳和一个行星,或目标行星及其一个自然卫星等。除主要力源外,其它力源(包括上述非质点引力和非引力等)均可处理成摄动源,即小扰动。因此,根据其力源环境不同,深空探测器的轨道动力学一般有两种处理方式。一种是仅考虑深空探测器飞行过程中的一个主要力源,将其作为受摄二体问题,这是行星际轨道设计的一般思路,HOWARD在其所著《Orbital Mechanics for Engineering Student》中对深空探测器的行星际轨道动力学进行了详尽的说明与介绍。另一种是考虑深空探测器飞行过程中的两个主要力源,将其作为受摄的限制性三体问题。文献[3]以受摄的限制性三体问题为基础,对深空探测器运动的轨道动力学基础进行了系统研究。
另外在小天体的深空探测中,小行星本身的特殊形状导致了其引力场的特殊性。在探测器逐渐接近小行星的过程中,小行星引力场已不能单纯视作中心引力场。为更精确地描述其引力特性,可将小行星视作多个引力中心的组合,如在日本的隼鸟(Hayabusa)探测器附着糸川(Itokawa)小行星时,就将小行星视作6个球形引力体的组合,如图1所示[4]。
多面体模型和质点群模型是目前最精确的小天体模型。这两种建模方法的发展和完善使对小天体附近轨道动力学问题获得更准确和深入的研究,该模型由WERNER提出并发展成较完备的引力场建模方法[5]。基于多面体模型的216 Kleopatra和6 489 Golevka小天体模型如图2所示。多面体近似模型的主要思想是用一个多面体或多个特定形状的质量元组合逼近小行星的形状,再通过积分变换将引力势能中的三重积分转为可计算的曲线和曲面积分。文献[6]从不规则形状小天体引力场的建模、小天体附近的自然轨道动力学、小天体附近的受控轨道动力学等方面对小天体附近轨道动力学与控制技术进行了研究。
综上所述:近地轨道动力学技术较成熟,通常采用受摄二体问题模型,包括解析法和数值积分法;深空探测动力学一般采用轨道拼接方法,通过分段考虑中心力源,将探测器作为受摄二体问题进行解决,但部分特殊任务,如平动点探测,不能简化为二体问题,需进一步开展受摄的限制性三体问题研究,而对小天体探测任务,因其特殊的形状和体积,需深入开展基于多质心或多面体拟合模型真实还原小天体附近动力学环境的研究。
1.2 轨道控制技术
1.2.1 近地轨道控制技术
航天器的轨道控制是对航天器施以外力,有目的地改变其质心运动轨迹的过程。单颗航天器的轨道控制按应用方式可分为轨道机动和轨道保持两种。
航天器轨道机动是使航天器从一个自由飞行轨道转移至另一个自由飞行轨道。常见的轨道机动方法包括霍曼转移和Lambert转移。霍曼转移常用于共面轨道转移任务,其优点是转移过程燃料消耗少,但使用范围较窄;Lambert变轨是已知初值状态、期望终端状态和转移时间,可实现任意轨道的转移任务。在轨道机动中,既要快速(最小时间)、精确,又要能量或燃料消耗最少,均涉及最小能量法和最短时间法[7]。
航天器轨道保持是使卫星轨道维持在期望的位置,其目的是克服摄动影响,使航天器轨道的某些参数值保持在允许的范围内,通常用于太阳同步对地观测卫星的轨道保持和地球静止轨道卫星的位置保持。轨道保持常用的方法有两种:一是基于解析方程的特殊点修正的方法;另一是转为相对虚拟卫星的相对控制问题。文献[8]用解析法对太阳同步(准)回归轨道卫星动力学特性进行了研究,分析了非球摄动、大气阻力摄动和太阳引力谐振等主要摄动因素对卫星的影响,并通过对轨道要素的控制实现太阳同步(准)回归轨道卫星的轨道保持。文献[9]提出了一种地球同步轨道卫星多星共位技术,在单颗卫星在东西和南北方向位置保持控制的基础上,使轨道倾角矢量差始终与相应的偏心率矢量差保持平行,实现多星共位,进而节约稀缺轨道资源的优势。文献[10]通过引入虚拟参考卫星,用模型控制方法(MPC)进行动态预测、滚动优化,在模型失配、环境变化情况下进行多变量优化,给出了一个最优的反馈增益序列,并通过采用开环和前馈-反馈闭环两种形式的控制方程,将卫星轨道实时保持在偏差管道内。文献[11]用线性离散系统最优控制理论,设计了最优状态调节器进行轨道维持控制,具较高的控制精度和良好的收敛性。
1.2.2 深空轨道控制技术
深空轨道控制一般采用化学推进系统,在地面测控和天文自主导航的基础上,进行脉冲推力的轨道修正,目前绝大多数的深空探测器采用了此类轨道控制方案。国外(尤其是美国)关于转移轨道中途修正的研究已十分成熟,目前在技术途径上很少有新的成果报道,有关方法和结论多体现在NASA的任务设计报告中[12]。文献[13]针对深空探测轨道自主中途修正问题,提出了一种基于B平面参数的求解算法。
近年来随着小推力推进系统的发展和完善,推进器寿命逐渐增加,比冲进一步增大,小推力轨道控制技术已开始被用于深空探测任务。1998年10月24日发射的深空一号(DS1)探测器是美国航天局(NASA)“新千年计划”中的首颗探测器,也是世界上第一颗以电离子推进发动机为主推进的探测器,其成果为未来小推力发动机在深空探测轨道机动控制中的应用奠定了基础[14]。日本于2003年5月9日发射的Hayabusa是第二颗采用太阳能电推进的探测器,Hayabusa探测器的实际工作寿命长达7年,任务期间离子推进系统工作超过40 000 h,共提供了约4.3 km/s的轨道控制速度增量[15]。
借力飞行是深空探测中轨道控制的又一项关键技术,其基础由行星和彗星轨道摄动理论发展而来,借助于飞越的行星等天体获取额外的速度增量。欧空局推出的登陆彗星的罗塞塔(ROSETTA)计划是一个极为经典的借力飞行应用任务。该探测器于2004年3月2日发射升空,在为期10年的太空旅途中,探测器飞行经历了火星借力1次和地球借力3次。
气动力辅助轨道转移的概念于20世纪60年代提出。1961年HORWARD提出气动力辅助轨道转移的意义与可行性,由此揭开气动力辅助轨道转移研究的序幕[16]。20世纪90年代,随着NASA系列行星探测任务的进行,气动捕获技术获得了很大发展。火星全球勘测器(MGS)、火星奥德赛探测器(ODY)、火星侦察轨道器(MRO),这些深空探测器在进行探测任务过程中都成功应用了气动辅助变轨技术[17-19]。
对火星等有大气天体的着陆探测任务来说,进入、下降和着陆(EDL)阶段的轨道控制是其中的关键,直接决定整个探测任务的成败。历次成功火星着陆探测任务进入段GNC主要采用基于IMU航位递推的导航技术、RCS三轴稳定姿态控制、自旋稳定姿态控制、纯弹道式进入、弹道升力式无制导进入,以及好奇号探测器采用的阿波罗式弹道升力式制导进入等[18]。下降段GNC主要采用惯性导航、RCS三轴姿态稳定控制、姿态晃动阻尼装置等[20]。着陆段GNC主要采用雷达高度计/IMU组合导航、光学图像/IMU组合导航、雷达测距测速/IMU组合导航、多项式制导、重力转弯制导、标称轨迹制导、RCS三轴姿态稳定控制、变推力发动机和固体反推火箭等[17]。好奇号探测器动力下降段采用了多项式制导和标称轨迹制导,但由于其在着陆末段新采用了“空中吊车”着陆方式,因而其动力下降过程作了相应调整[21]。
月球由于无大气环境,其着陆过程的轨道控制只能采用完全依赖主动推力减速的轨道控制方案。中国的嫦娥3号卫星采用了常推力燃耗次优显式制导、4次多项式制导等制导控制方式,完成了7个任务阶段的轨道控制任务[22]。文献[23]对月球软着陆的制导与控制进行了研究,以由极大值原理得出的最优着陆轨迹为基础,给出了一种基于人工神经元网络的非线性最优控制策略,设计了非线性闭环制导控制律,使着陆器按最优轨迹飞行。此方法基本可实现对最优轨迹的复现跟踪。
圆型限制性三体问题中,在共线平动点附近,存在中心流形(实为条件稳定轨道,如Lissajous轨道、Halo轨道、拟Halo轨道等)和不变流形(稳定流形和不稳定流形);在三角平动点附近,存在长周期轨道、短周期轨道和垂直周期轨道三种基本周期轨道类型[24]。目前已有多个深空任务实现了平动点轨道控制,ISEE3(1978年)、SOHO(1995年)、Genesis(2001年)等运行于日地L1点,MAP(2001年)、PLANK(2007年)、GAIA(2012年)等运行于日地L2点,中国的嫦娥2号卫星于2011年8月进入环绕地月L2点的Lissajous轨道[25-26]。
综上所述:对单颗航天器的轨道机动任务,常用方法包括霍曼转移和Lambert转移,但为完成时间最优和燃料最优任务,需结合最优控制理论实现最优轨道机动控制;对单颗航天器的轨道保持任务,常用方法包括基于解析方程的特殊点修正和相对虚拟卫星的相对控制,其中基于解析方程的特殊点修正方法具燃料最省的优点,而基于相对虚拟卫星的相对控制可保证较高的保持控制精度,须根据能量消耗和控制精度综合考虑。对深空探测任务的轨道控制,随其飞行阶段的环境特点和动力形式而不同。星际巡航阶段化学推进可采用B平面参数求解算法,需重点解决中途修正和借力飞行问题;电推进需采用优化算法,重点解决连续推力方向的问题;地外天体捕获制动阶段目前研究重点集中于直接力与气动力复合的减速策略;地外天体着陆任务主要集中于燃料最优的高精度着陆制导方法研究;平动点轨道主要集中于解决圆型限制性三体问题中的轨道保持策略。
1.3 姿态动力学
对航天器姿态动力学建模,根据是否考虑结构动力学影响,可归为刚体航天器动力学建模和柔性航天器动力学建模。在刚体航天器动力学建模中,根据包含刚体数量的不同,可分为单刚体航天器动力学建模和多刚体航天器动力学建模;在柔性航天器动力学建模中,主要考虑刚体动力学和结构动力学交叉影响[27]。
1.3.1 刚体航天器姿态动力学
刚体航天器是一类带刚度较高的太阳能帆板或天线结构,整体结构紧凑、柔性特征占比小的航天器。
对单刚体航天器,其姿态动力学模型相对较简单,可直接用牛顿-欧拉或Lagrange分析力学等方法建立。所建立的动力学模型,姿态主要采用方向余弦、欧拉角或四元数、奇异值分解方法等进行描述[28]。
对多刚体航天器,可认为是由多个刚体基元以铰链相互连接构成了一类较复杂的航天器,如带多个对称转子的陀螺体卫星、带刚硬太阳帆板的卫星、带机械臂的空间站等[29]。多刚体航天器动力学建模问题可归为无根树多刚体动力学建模问题,主要包括空间结构关系描述和建模推导两个方面。针对多刚体系统结构的空间连接关系描述,ROBERSON等基于图论首次提出了一种通用性分析方法,即R-W方法。在多刚体系统结构的位置关系和空间姿态的描述中,文献[30]通过将矢量与矢量矩整合为旋量(一个六维矢量),提出了一种简明的开链和闭链多刚体运动学与动力学分析的旋量方法。在建模推导中,文献[31]基于达朗伯原理,结合矢量力学和分析力学,用广义速率描述运动,建立了多刚体的动力学方程。文献[32]提出滤波理论与多体系统动力学空间算子代数理论,建立了空间多刚体系统模型的动力学算子建模理论及递推计算方法。文献[33]基于空间算子代数符号体系,推导了适于航天器实时仿真的多体动力学递推算法。
另外,针对多闭链刚体系统,文献[34]用变分方法的高斯最小约束原理对边界约束进行分析,避免了求解微分方程,降低了建模复杂度。
1.3.2 柔性航天器姿态动力学
随着航天器的发展,星上安装的大尺寸太阳能电池阵或天线载荷等柔性结构的质量和转动惯量在航天器整体中的占比不断上升,使结构动力学与刚体动力学间的交叉影响逐渐凸显,出现了刚柔耦合航天器,如实践五号、资源一号卫星和神舟系列飞船等航天器。另外,以大型薄膜衍射成像航天器为代表的新型复杂柔性天器,安装的柔性结构的质量和转动惯量等所占比重远超过中心体,或仅由柔性结构构成。此类航天器属柔性多体航天器,其结构动力学与刚体动力学间的交叉影响较刚柔耦合航天器更为凸显,建模过程更复杂。
针对刚柔耦合航天器动力学建模,主要研究柔体变形与其大范围空间运动间的相互作用或相互耦合,以及由这种耦合导致的动力学效应[35]。对刚柔耦合航天器,文献[36]最早将结构动力学的有限元方法引入多体弹性动力学,推动了柔性航天器动力学建模技术发展,但未考虑多刚体系统动力学与结构力学间的耦合作用。文献[37]用随动坐标系给出多刚体系统动力学模型,根据矢量变分方法和虚功原理,建立了单开链和含闭环开链的柔性多体系统动力学模型,进一步发展了柔性航天器的动力学建模技术,但未描述物体大位移运动时构件弹性变形与大范围运动的相互耦合作用。为解决该问题,LINKINS首次提出了对柔体描述的离散坐标法,通过模态坐标或有限元节点坐标直接描述物体的弹性变形,但该方法在对柔体离散时未考虑大范围运动对其的影响,是一种零次近似意义的耦合[38]。为进一步解决大范围运动对柔体离散描述时的影响,文献[39]提出用混合坐标建立航天器动力学模型,即用离散坐标描述物体的刚体运动,模态坐标(即变形坐标)或有限元结点坐标描述物体的弹性变形。文献[27]考虑柔性体与柔性体连接点间的复合位移变形,用混合坐标法建立了复合柔性结构航天器动力学模型。在上述理论发展的基础上,文献[40]对关于带柔性附件的航天器姿态动力学与控制的研究成果进行了较全面的总结。国内同期也对柔体航天器动力学开展了大量研究,文献[41-42]对刚柔耦合多柔体航天器的动力学建模问题进行了系统阐述。在柔体航天器动力学模型理论推导的基础上,针对动力学方程的求解问题,主要发展了隐式算法如Newmark,Wilson-θ,Runge-Kutta等方法[43-45]。但当刚性程度过大(高低频率之比大于1 000)时,动力学方程计算结果出现发散[46]。针对求解发散问题,文献[47]提出了保辛摄动迭代算法,解决了刚体、柔体不同时间尺度积分造成的数值病态失真问题。
当刚柔耦合系统的运动速度增大到一定程度后会产生低阶谐振现象,该现象被称为动力刚化现象。其中,KANE在处理高速旋转的悬臂梁动力学时得到错误结论,首次提出了动力刚化的概念,并通过平面细长梁的简单偏微分形式表达位移-应变关系,验证了动力刚化问题[48]。动力刚化的实质是作大范围空间运动的柔性体因运动与变形间的相互耦合作用,导致柔性体刚度的增大(即附加动力刚度)。在该问题研究方面,文献[49-50]较全面阐述了连杆柔性对高速机构动力学响应的影响。文献[51]认为动力刚化现象的实质是柔性体刚度随其应力而变,指出当物体进行大幅度空间运动时,外力、约束反力导致柔性体内部应力变大,产生动力刚化现象。文献[52]认为柔性体刚度的减弱是变形的广义坐标过早线性化导致的,通过精确到二阶小量的运动学描述进行分析,得到了相同的结论。文献[53]提出了解决动力刚化问题的一种数值方法,并进一步证明了子结构中柔性体的线性化假设成立。文献[54]基于凯恩方程和休斯敦方法的柔性多体动力学建模理论,同样也证明了柔性多体系统的动力刚化现象。
当刚柔耦合航天器的中心刚体也具柔体特性时,刚柔耦合航天器将转成柔性多体航天器。针对多体动力学问题,文献[55]系统阐述了多体动力学模拟和分析的研究进展。针对大型柔性结构振动动力学,文献[56]用模态坐标描述柔性结构的节点位移,通过模态截断缩减广义自由度,提出了模态综合建模方法。SHABANA等提出了柔性系统的动态子结构建模方法,进一步发展了柔性多体系统理论[57]。针对解决大范围运动的柔性多体变形问题,文献[58]结合连续介质力学和有限元方法,提出了绝对节点坐标法。同时,文献[59]基于浮动坐标系,用绝对节点坐标法的建模理论,建立了大范围空间运动与小变形柔性梁的刚柔耦合动力学模型。为解决计算效率不高的问题,文献[60]基于绝对节点坐标方法分析基于第一类、第二类Piola-Kirchhoff应力张量推导获得了弹性力及其Jacobi矩阵的解析表达式,通过对比研究给出了一种解决途径。
综上所述:对刚体卫星和柔性卫星姿态动力学建模的研究,主要集中于将结构作为连续体建模,分析影响整星动力学特性的主要因素,相关研究成果已在工程中得到了应用和验证;对后续安装柔性结构尺度和复杂度不断增加的柔性卫星,柔性结构中存在的安装间隙和膨胀预留间隙的影响将不可忽略,使碰撞动力学与结构动力学相互交叉,因此需深入研究此类非连续(间隙连接)柔性航天器的动力学建模方法。
1.4 单星姿态控制技术
1.4.1 单星稳态姿态控制技术
早期发展的卫星主要为动量卫星(如自旋卫星、双自旋卫星和带偏置动量飞轮卫星),此类卫星具有陀螺定轴性[61]。对动量卫星的姿态稳定控制,主要是为消除星体章动对星上探测载荷高性能工作的影响,可通过利用喷气控制、章动阻尼器或太阳光压控制作用,实现对双自旋卫星的稳定姿态控制。同时,为判定控制系统的稳定,根据双自旋卫星的动力学方程,研究了姿态控制稳定性判据[62]。另外,针对自旋卫星和双自旋卫星的重定向控制问题,开展了燃料消耗最优控制和大角度重定向控制研究[63-64]。研究者在分析太阳电池阵固有频率和章动控制频率的基础上,给出了系统新的稳定性边界,推动了此类卫星控制系统技术的发展[65]。
由于动量卫星平台对有效载荷的应用限制较大,平台控制精度较差,不利于满足功能更复杂、性能更高的有效载荷发展需求,动量卫星逐渐被控制更灵活的零动量卫星替代。
a)零动量刚体卫星稳态姿态控制技术
根据执行机构配置,刚体航天器姿态稳定控制可分为全驱动和欠驱动两种。对三轴稳定航天器来说,其姿态控制系统在3个轴向均配置执行机构(动量交换装置或推力器)构成全驱动系统,即系统位形空间的维数与其控制输入维数相同,欠驱动系统是指控制输入维度低于其位形空间维数的系统。
(a)全驱动姿态控制技术
根据航天器运行状态下的信息测量情况,可将全驱动控制分为全状态反馈控制和输出反馈控制。全状态反馈控制是指航天器在运行状态下的姿态和角速度信息均可通过敏感器测量获得。近年来,为降低航天器制造成本或作为角速率敏感器失效后的备份方法,越来越多的研究致力于输出反馈控制在航天器姿态控制领域中的应用,其中又以仅用姿态信息反馈作为主要研究内容。
航天器姿态控制研究初期,多数研究成果是先将系统的非线性模型作线性化处理,再用线性控制理论中的常用方法解决[66-67]。但实际的航天器姿态控制系统是一个复杂的非线性控制系统,线性化的解决方法显然已不能满足其需求,因此用非线性控制方法解决航天器姿态控制的问题是目前主流的研究方法,应用较广的非线性控制方法有基于Lyapunov方法的控制方法、非线性H2/H∞及其混合控制方法、滑模变结构控制方法、自适应控制方法、预测控制方法,以及逆最优控制方法等。由于航天器系统和运行环境的复杂性,需考虑系统的不确定性和工作过程中存在的干扰,文献[68]将航天器系统的不确定参数与外界干扰的影响统一为总干扰,并通过设计非线性干扰观测器实现对总干扰的估计,从而保证系统的稳定性。文献[69]对有大惯量运动部件的三轴稳定卫星在稳态运行期间高精度高稳定度控制方法进行研究,提出了一种动态补偿控制算法。
当系统的状态变量无法由直接测量获得时,可通过设计系统状态观测器或动态补偿器的方法,实现输出反馈控制。文献[70]针对航天器姿态输出反馈控制问题,设计了基于模型的二阶观测器。文献[71]通过在Luenberger观测器的基础上加一个变结构控制器设计滑模观测器以实现系统的稳定控制。设计状态观测器实现输出反馈控制常会使系统复杂化,且状态观测器的状态估计量往往与实际状态存在偏差。因此,对直接设计输出反馈的控制方法进行了大量研究。文献[72]用输出反馈变结构设计了自适应控制器,可对航天器的未建模动态特性进行控制,并能抑制俯仰轴的振动模态。文献[73]分析了在状态不完全可测时带非线性输入系统的控制问题,提出了一种输出反馈变结构控制方法。文献[74]综合自适应控制方法与鲁棒控制方法设计输出反馈控制器,仅利用输出信息实现了航天器的稳定姿态控制。文献[75]针对姿态调节问题用无源化的方法设计了输出反馈控制器。
(b)欠驱动姿态控制技术
由于欠驱动模型的独立控制输入维数小于自由度维数,使欠驱动航天器的运动特性相对于常见的三轴稳定航天器有较大区别。关于欠驱动航天器最早的理论研究可追溯到1984年[76]。文献[76]针对刚性航天器在有不同数量的独立控制输入力矩的情况下,基于微分几何理论分别给出了航天器能控的充要条件。文献[77]指出,若欠驱动航天器仅有2个独立输入力矩且输入力矩与主转动惯量轴同向,则航天器系统的角速度可渐近稳定的必要条件是欠驱动轴不是系统的对称轴,并给出了相应的Lyapunov函数。Brockett必要条件指出了欠驱动航天器的姿态控制不可能通过一个光滑定常的静态或动态反馈控制律渐近稳定到系统的平衡点。即针对两控制输入的欠驱动航天器,以往用反馈线性化等能得到光滑控制律的控制方法已不再适用,从而使欠驱动航天器稳定问题变得更复杂。早期针对欠驱动航天器姿态稳定的大部分研究仅以系统的动力学模型为被控对象,即仅考虑系统的角速度变量的稳定性[78]。
目前,针对完整欠驱动航天器系统的闭环姿态稳定问题的研究获得了一定的进展,主要分为两大类:不连续定常状态反馈控制器和连续时变状态反馈控制器。
对不连续定常稳定控制器,文献[79]通过采用分段解耦的方式,经过多次分段机动,在有限时间内实现了航天器姿态的稳定,而每次机动均采用形式简单的PID控制器;文献[80]进一步发展该方法,在达到相同控制效果的情况下,减少了分段机动的次数。文献[81]针对非轴对称情况设计了全局渐近稳定的切换控制器。文献[82]采用不连续定常的反馈控制器同样解决了角动量为零的航天器的姿态稳定问题。
连续时变稳定控制器的特点是控制器不仅依赖于系统的状态,而且依赖于时间变量。连续时变反馈控制器又可分为光滑时变反馈控制器和非光滑时变反馈控制器两种。光滑时变控制器的控制律光滑,计算便捷,系统稳定性好,易于工程实现;非光滑时变控制器的收敛速度更快,一般能以指数速度收敛。光滑时变稳定控制器的理念最早于1991年提出[83]。在此基础上,文献[84]采用中心流形理论,结合平均原理及Lyapunov方法,针对欠驱动航天器,首先设计了光滑时变的局部稳定控制器;随后文献[85]提出了非光滑时变控制律,提高了自身算法的收敛速度。
现阶段,部分学者对非光滑时变领域进行了研究,而用光滑时变反馈控制解决欠驱动系统的姿态稳定问题已获得了不少成果。文献[86]针对任意剪刀对构型飞轮群的欠驱动刚体航天器,用Lyapunov函数方法设计了反馈控制器,实现了系统的姿态稳定。文献[87]用分层滑模控制方法,根据Lyapunov稳定理论和Barbalat引理,设计了欠驱动航天器的全局稳定姿态控制器;文献[88]用广义逆控制理论设计了欠驱动航天器的姿态机动控制器,保证了整个系统的渐近稳定性。
综上所述:针对刚体卫星,当姿态和角速度信息均可测时,全状态反馈控制能满足此类卫星的稳定控制;当仅部分信息能测时,根据可测得的姿态信息采用相应的输出反馈控制技术;当卫星姿态控制系统呈现欠驱动特性时,将无法得到一般的光滑定常的静态或动态反馈控制律实现卫星的稳定控制,因此需深入开展满足此类卫星姿态控制系统渐近稳定控制技术的研究。
b)零动量柔体卫星稳态姿态控制技术
柔性体卫星装载的柔性结构,使姿态控制设计中需同时考虑整星的姿态稳定与柔性结构的挠性振动干扰抑制。对柔体卫星的姿态控制,根据是否采用分布式执行机构,主要分为集中式姿态控制技术和分布式姿态控制技术。目前,国内外对两种不同姿态控制方法开展了广泛研究。
(a)集中式姿态控制技术
对采用集中式姿态控制的柔体航天器,有效载荷与中心刚体固连,姿态控制目标主要是实现中心刚体的精确定向控制;姿态控制执行机构(如动量交换装置或推力器等)集中安装于卫星中心刚体上。
对此类航天器姿态控制设计,在分析柔性结构挠性振动特性的基础上,将姿态控制回路的自然频率设计为一阶固有模态频率的1/3以下,与柔性结构固有频率隔离,以同时实现姿态稳定控制和柔性结构挠性振动抑制。但当柔性结构的固有频率接近姿态控制回路带宽时,极易激发柔性结构振动,造成系统不稳定[89]。为将柔性结构的状态变量引入控制系统设计中,从时域的设计角度对基于线性二次型控制理论、滑模变结构控制理论、H∞控制理论、自抗扰控制理论、奇异摄动控制理论、模糊控制理论、神经网络控制理论等在柔体航天器控制中的应用进行了研究[90-96]。
在用先进控制理论“软措施”实现柔体航天器姿态控制的基础上,为进一步提高控制系统稳定性,实现柔性结构挠性振动快速衰减,从能量耗散的角度逐渐发展了多种类型的被动式阻尼器等“硬措施”。能量耗散的要点是将振动能量在结构的局部区域或边界上损耗掉,耗能方法常被用于控制整个结构的行为[97]。常用的耗能器包括黏滞阻尼器、涡流阻尼器、黏弹性阻尼器、机械摩擦阻尼器、Velcro阻尼器和粉末阻尼器等。被动式阻尼器,无需外界能源和反馈信号,控制简单,安装实现易,被广泛用于工程中,如哈勃太空望远镜就在太阳能电池阵驱动机构与展开支架间安装了一个黏弹性阻尼器,以获得更好的指向精度[98]。
虽然通过软-硬结合的姿态集中式控制技术可实现对柔体卫星的稳定控制,但随着星上柔性结构尺度增大、柔性增强、高精度形面保持要求等问题出现,姿态集中式控制方法的控制效果变得不理想,因此进一步发展了姿态分布式控制技术。
(b)分布式姿态控制技术
当卫星装载的柔性结构的固有频率非常低时,不仅模态截断等造成的建模误差和挠性干扰等对高精度姿态控制带来更大的挑战,而且高性能柔性载荷也对形面精度保持控制进一步提出了苛刻要求,如采用集中式控制方法,将导致控制系统结构十分复杂、控制算法计算量过大,较难实现控制目标。因此,对此类柔体卫星高精度控制,可采用分散姿态控制[99-100]。为满足对形面保持精度有要求的柔性结构挠性振动主动抑制,提出了在柔性结构上布局传感器的方法,并结合整星姿态控制提出了分布式控制方案[101]。该方案的核心是柔性结构振动信息的获取和挠性振动高效主动抑制的实现。
在柔性结构振动信息获取方面,为全面获取柔性结构的振动信息,需在柔性结构上安装传感器。同时为实现对柔性结构挠性振动的有效抑制,需在柔性结构上安装作动器。但由于柔性结构本身刚度较低,可安装传感器或作动器的位置和数量存在严格约束条件,须对传感器和作动器的布局配置问题进行优化设计。针对该问题,分别从基于Gram矩阵的系统可控/可观性准则、基于系统能量准则、基于系统响应的配置准则、基于失效和可靠性的配置准则、基于控制/观测溢出的配置准则、其它准则等多方面进行了研究,形成的成果可实现对传感器和作动器的优化布局配置[102-108]。针对不同的柔性结构特征,可选择相匹配的优化准则建立优化目标函数,进而通过一定的优化算法求解出传感器和作动器的布局配置位置。在确定了传感器/作动器布局配置位置后,可实现对柔体卫星中柔性结构的挠性振动信息的测量和振动的主动抑制[109]。
在姿态分布式控制技术中,最关键的是柔性结构挠性振动主动抑制,最直接的控制方法是速度负反馈控制方法,主要通过在柔性板状结构同位置测量同位置控制实现,即在正反两面分别粘贴作动器和敏感器,以构成速度负反馈控制回路[110]。虽然该方法简单直接,但对多自由度的柔体系统,存在控制溢出问题,较易激发高阶模态,造成系统发散。为解决该控制溢出问题,通过将柔体系统动力学方程从物理坐标系转换至模态坐标系,用正交化的模态坐标描述挠性振动物理变形量,对动力学方程进行解耦,并基于模态方程,提出了“独立模态控制”方法[111]。该方法是通过将复杂的高阶微分方程问题转为多个低阶微分方程问题,达到简化控制目的。但对复杂柔性结构,由于动力学建模过程中存在模态截断,采用该方法控制有限阶模态时可能激发残余模态(未控制模态)的振动。为解决残余模态激发问题,对独立模态控制方法进行改进,主要通过分析复杂柔性结构模态能量的高低,对系统各阶模态由高到低进行排序,先利用m个作动器控制前m阶振动模态,降低受控模态能量;然后在控制过程中,监测非受控模态的模态能量,当非受控模态被激发超过前m个受控模态中任何一个模态能量时,作动器转向作用于这些非受控制模态,抑制其振动,最终实现结构挠性振动的整体受控,该方法为修正的独立模态控制方法[112]。另外,为解决系统的高频溢出问题,正位置反馈控制方法(PPF)也被广泛用于柔性结构振动抑制控制[113]。PPF控制策略针对特定模态,通过闭环极点配置的原理,可大幅提高该模态阻尼而不会引起系统高频“溢出”问题,对模态频率的变化也有很好的鲁棒性。
上述振动控制方法主要针对柔性结构自身振动抑制进行设计,将柔性结构与整星姿态控制的耦合作用作为外部干扰,虽可实现柔体卫星的稳定控制,但对柔性结构尺寸、重量和转动惯量等在整星中占比较大的柔体卫星(卫星模态增益系统在0.6以上),柔性结构与中心刚体耦合作用非常强,采用该控制方法会导致稳定时间长、消耗能量大的问题。为解决上述问题,实现姿态的快速稳定,需对姿态控制与振动抑制控制进行协同设计,即分散协同的控制方法。文献[114]针对大型柔性结构,将系统分解为多个子系统,在分别设计子系统级H∞状态反馈器和全局级协同控制器的基础上,用多级控制方法设计了分散协同H∞控制器,实现了系统的快速稳定。
综上所述:针对星上柔性结构刚度较大、无形面精度保持要求的柔性卫星,通过采用软-硬结合的姿态集中式控制技术可实现对此类卫星的稳定控制;对安装柔性较强且尺度较大柔性结构的卫星,为实现高精度稳定控制或高精度形面保持目标,仅采用姿态集中式控制方法将无法满足控制目标,须根据此类卫星的结构特性和动力学特性采用相应的姿态分布式控制技术。
1.4.2 单星敏捷机动姿态控制技术
为实现高精度地球立体测绘、自然灾害快速响应、军事侦查卫星快速目标捕获与追踪等任务,单个卫星需具备较高的敏捷机动性能。具有敏捷姿态机动能力的卫星通常称为敏捷卫星,目前成功应用的主要有英国BILSAT-1侦查卫星、美国WorldView系列对地观测卫星、法国Pleiades光学遥感卫星等,其中姿态角速度机动能力最高可达4.5 (°)/s,姿态角加速度最高2.5 (°)/s2[115-116]。我国的高分二号等对地观测卫星也具有整星的快速姿态机动能力,具备180 s内实现35°侧摆能力。
敏捷卫星姿态机动控制的主要任务是将卫星从一种姿态指向转换到另一种姿态指向,期间需考虑控制输入饱和约束、星上载荷及敏感器等角速度约束、冗余星上执行机构控制分配、太阳帆板及柔性天线等结构振动、星敏感器等弱光敏感器对强光源的回避等诸多因素。卫星姿态机动控制系统的敏捷性和精确性等还需权衡系统可靠性、能量消耗的最优性、冗余敏感器及执行器的优化配置与可扩展性等多个因素。根据机动任务过程中的约束形式,姿态控制方法可分为无姿态约束和有姿态约束的姿态机动两大类。同时,随着卫星由刚体到柔体的复杂化,姿态机动也会面临振动控制等更多问题。
a)无姿态约束刚体敏捷卫星姿态机动
对无姿态约束刚体敏捷卫星,主要是实现从当前姿态机动至期望姿态,在机动过程中不考虑天线指向等姿态约束条件。此类卫星的姿态机动控制问题一般可分为开环和闭环两种模式。开环控制主要是根据期望姿态信息,通过构建最小代价函数,将敏捷机动控制的最优化指令求解问题转换为一个非线性系统的两点边值问题。但开环控制因未实时反馈机动到位偏差,其鲁棒性较差,当存在模型误差或干扰时,会产生较大控制误差,且对复杂约束问题不易求解,因此较多采用闭环控制模式。闭环控制模式可分为无路径跟踪的闭环控制和路径跟踪控制。在路径跟踪控制策略中,跟踪控制器的设计与无路径跟踪的闭环控制器类似,主要区别是事先需进行机动路径规划。以下分别介绍闭环控制方法和姿态路径规划方法。
对无路径跟踪的闭环控制问题,由欧拉定理可知:空间中任意两个姿态都能通过绕空间某一固定轴旋转一定角度相互转换,因此对三轴姿态机动任务来说,绕空间欧拉轴的旋转可实现沿最短路径到达期望姿态。综合考虑控制系统带宽、阻尼等因素,文献[117]提出了一种基于自适应饱和向量的递阶饱和PID控制器,有效结合了传统频域分析方法和现代控制方法。考虑刚性卫星的惯量不确定和外部干扰力矩等因素,文献[118]通过研究冗余飞轮的力矩分配特性,分析姿态机动过程中的最大可行角加速度和角速度,提出了一种基于优化策略的新型制动曲线法,实现了时间高效卫星姿态机动。另外,针对敏捷机动控制问题,对基于其它先进控制方法也进行了广泛研究,如基于滑模变结构控制的快速姿态机动控制、基于终端滑模的有限时间姿态机动控制、基于反步法的非线性姿态机动控制、基于遗传算法的飞轮驱动航天器姿态机动控制、基于鲁棒控制的姿态机动过程干扰抑制,以及各种考虑执行机构特性的姿态机动控制[119-125]。
在姿态机动路径规划方面,各种最优化方法也陆续得到应用。因对刚体卫星,若认为卫星质量特性、执行机构力矩特性等精确已知,不考虑外部随机干扰和不确定性时,采用最优化方法将有望获得满足多种约束的最优姿态机动路径,然后卫星可采用姿态跟踪策略实现姿态机动任务。对采用飞轮、控制力矩陀螺等作为执行机构的敏捷卫星来说,时间最优是最具实际应用价值的性能指标。早在1993年,文献[126]即对刚体航天器的时间最优姿态机动进行了分析,用打靶法获取了不同角度的时间最优姿态机动路径,并揭示了不同路径的时间最优性物理机理。但实际上不同执行机构的力矩约束并不相同,典型的三轴正交安装的飞轮结构的力矩包络为正方体,而五棱锥结构的控制力矩陀螺力矩包络则接近球体,因此文献[127]根据卫星执行机构力矩的不同约束研究了姿态机动时间最优解的特性。此外,针对以最小冗余度的金字塔构型控制力矩陀螺作为执行机构的卫星时间最优姿态机动,文献[128]也开展了相关研究。从最优化问题的求解方法来看,目前已有的研究方法包括数值计算方法和非线性规划方法等[129-130]。近年来,因计算量小、对初值不敏感等特点,伪谱法逐渐被用于解决各种不同的非线性规划问题。考虑反作用飞轮和控制力矩陀螺等作为执行机构情况,文献[131]用伪谱法优化获得了一系列多约束卫星姿态机动路径。NASA通过离线优化方法获得了时间最优的姿态机动路径,并在2010年将其用于太阳过渡区与日冕探测器,首次实现了在轨试验验证[132]。
b)复杂姿态约束刚体敏捷卫星姿态机动
敏捷卫星在执行在轨姿态机动任务过程中,除时间最优、能量最优、控制力矩约束和角速度约束等多种约束外,大量实际任务还需考虑弱光敏感器(如星敏感器、红外和紫外敏感器等)对强光源的回避、合作/非合作目标交会过程中的天线和太阳帆板的避碰等因素产生的禁止姿态约束,或考虑姿态机动过程中太阳帆板指向太阳、通信天线指向中继站等期望姿态约束等,因此开展复杂姿态约束刚体敏捷卫星姿态机动控制律设计和路径规划有其重要的工程应用和理论研究价值。
在闭环控制方面,为实现星上光学载荷对太阳矢量的回避,文献[133]通过构造和姿态约束相关的势函数,设计了基于欧拉角的含指向约束卫星大角度姿态机动控制器。类似地,为实现星上安装的多个星敏感器对太阳矢量的回避,文献[134]通过构造卫星禁止姿态集合及相关势函数,设计了基于四元数的含多个指向约束的轮控卫星自主姿态机动控制器。后续研究者也利用罗德里格参数描述禁止姿态并构造势函数,进而推导姿态机动控制律[135]。由于基于势函数法设计的控制器在接近禁止姿态时常产生极大的控制力矩需求,远超出实际卫星控制能力,考虑控制力矩受限情况,对复杂约束卫星姿态机动控制也进行了相关研究[136]。
在考虑多种约束的机动路径规划方面,虽然状态反馈控制规律具计算量小、实时性好等特点,但因仅基于局部状态信息设计,在控制力矩输出能力受限时难以确保对禁止姿态的回避,也无法保障姿态机动过程对特定目标的指向,因此较多学者研究了考虑复杂姿态约束的自主姿态机动路径规划问题。如基于几何特征路径规划法、考虑约束姿态的约束监测法、随机姿态规划法、半定规划法、粒子算法、伪谱法、对比评估法、基于伪谱法与物理意义结合的混合规划法等多种方法[137-144]。上述方法虽能解决不同约束下的卫星姿态机动路径规划问题,但受制于星载计算机的计算能力约束,只能通过离线路径规划与在线轨迹跟踪结合的方式实现,一定程度降低了敏捷卫星的自主性和快速响应特性。
c)柔体卫星姿态机动控制
当卫星安装了大型太阳帆板、大型天线等柔性结构,卫星进行快速姿态机动时极易激发柔性结构的挠性振动,进而产生挠性干扰力矩作用于卫星平台,影响卫星姿态机动的快速性和指向精度。因此,对柔体卫星的姿态机动控制,不仅需满足机动角度要求以及上述各种约束条件,而且要重点考虑机动快速性和柔性结构的挠性振动抑制问题。
柔体卫星的姿态机动控制包括姿态机动指向控制和挠性振动抑制两个方面。在姿态机动指向控制中,针对具不确定性的复杂非线性控制问题,目前的解决方案主要有鲁棒控制方法、变结构控制方法、自适应控制方法和模糊神经网络控制方法等[145-149]。在挠性振动抑制中,主动振动控制方法研究成果较多,从原理上可分为两类策略。一类是调整姿态运动规律,减小对挠性运动的激发,可归为对姿态控制指令的一种调制,典型方法主要有分力合成、输入成形等[150-152]。另一类是在柔性结构上配置分布式作动执行机构,通过敏感挠性振动信息直接对柔性结构施加控制作用以抑制挠性振动,典型方法有基于压电智能材料的主动抑制技术等,此类方法与稳定控制时的主动振动抑制方法相同。
对第一类主动振动控制方法,输入成形技术是一种时滞滤波技术,以叠加原理为基础,通过不同相位振动的叠加相消实现振动抑制[153]。在实现中,可通过设计有不同幅值和作用时刻的脉冲序列与系统参考输入卷积,得到成形后的指令信号。针对传统零振动输入成形器对系统模态频率鲁棒性差的问题,后续又提出了零振动零微分(ZVD)成形器、超不敏感(EI)成形器等鲁棒成形技术[154]。对多模态系统,还研究了指定不敏感度(SI)输入成形技术等[155]。其中:针对有柔性附件的航天器,设计了多模态输入成形器作为前馈结构与闭环控制结合,用于解决柔性附件的振动问题[156-157]。另有部分研究者通过将输入成形技术与输出反馈滑模控制、自适应PD复合反馈控制、自适应滑模控制等不同闭环控制方法结合,或将输入成形技术与机动路径规划方法结合,以解决柔性航天器控制中的振动抑制问题[158-161]。但上述输入成形研究都基于系统的零初始条件假设,对非零初始条件情况就不再适用。目前,国内外针对非零初始条件的输入成形技术也进行了相关研究[162]。
另一方面,当柔体卫星采用轨迹跟踪的机动控制策略时,为减小机动过程对挠性振动的激励,缓解快速性与稳定度的矛盾,合理的规划机动路径就显得愈发重要。刚体卫星快速机动中较常采用的BCB型路径(即梯形路径),因存在角加速度突变,直接用于柔体卫星时易激发振动[163]。针对此问题,目前已提出的解决方案主要有以下几类。第一类是文献[164]提出的时间优化-零振动(TO-ZV)路径规划方法,通过寻找机动中执行机构的最佳切换时间实现零振动控制。第二类方法是采用较平滑的机动路径以减小对挠性振动的激励,包括对Bang-Bang控制的平滑化处理,或采用余弦型、S型速度曲线型、抛物线型等不同路径形式,并优化路径参数以减小挠性振动[165-167]。第三类方法是将挠性振动作为性能指标求解最优机动路径,如文献[168]针对柔体航天器的rest-to-rest机动,用变分法求解使结构振动最小的最优机动指令;文献[169]以时间-燃料、挠性振动能量的加权组合为性能指标,采用hp自适应伪谱法规划了最优机动路径。另一些路径规划研究考虑了系统的柔性特征,如文献[168]结合系统模态频率分析了影响结构激励的机动路径参数;文献[170]针对一般的柔性系统给出了基于FIR滤波器的最优时间轨迹规划方法,同时考虑了时域和频域约束,可实现对系统残余振动的抑制。
综上所述:对无姿态约束的刚体卫星姿态机动问题,目前研究成果较多,多种控制方法均获得了应用,技术相对较成熟;对有复杂姿态约束的刚体卫星姿态机动问题,在闭环反馈控制中尚需重点考虑控制力矩受限的情况,在路径跟踪控制策略中还要进一步提高路径规划的自主性与实时性;对柔体卫星的姿态机动控制问题,研究重点是对挠性振动的抑制及挠性振动激励的减小,目前在输入成形与路径规划上已经进行了大量研究,但仍存在非零初始条件难以应用、计算复杂等问题需解决。
2 多星动力学与控制技术
本章总结了近年来星动力学与控制技术的重点问题。对多星动力学,介绍了相对轨道动力学和姿轨耦合动力学;对多星控制,介绍了位置控制技术及姿轨耦合控制技术近年来的发展。
2.1 多星相对轨道动力学技术
相对运动建模与分析是研究航天器近距离相对运动的理论基础。通常,相对运动的研究忽略姿态运动,有两种思路:一是动力学方法,也称为代数法,以相对运动动力学方程为基础,便于相对运动制导与控制;二是运动学方法,也称几何法,以轨道要素表示的相对运动模型为基础,便于轨道设计和摄动分析[171-172]。
代数法以两航天器绝对位置矢量描述的基本运动方程为基础,通过假设和简化处理,在相对运动坐标系(Hill坐标系)中建立相对运动模型。C-W方程(也称为Hill方程或H-C-W方程)是最经典的代数法相对运动模型,它以球形中心引力体和圆参考轨道为假设,未包含摄动力的影响,尽管本身存在误差,但给出了最简单的相对运动关系,在编队飞行、空间交会对接等中应用广泛。文献[173]分别分析了地球引力函数的带谐项(J2项)对C-W方程的影响,并依此改进C-W方程。为解决深空探测日心轨道中探测器与小天体的相对伴飞问题,文献[174]在同时考虑太阳和小天体引力的基础上,建立了探测器相对小天体运动的相对动力学方程。
为消除圆参考轨道的限制,文献[175]假设航天器间距与其地心距的比值为一阶小量,通过变量替换,以参考点的真近点角为自变量使方程变为无量纲的形式,将非线性相对运动微分方程组简化为线性时变方程,即T-H方程,得到二体条件下用真近点角/偏近点角描述的解析解。T-H方程可描述任意偏心率参考轨道的相对运动,但依然存在线性化误差和摄动误差。文献[176]将T-H方程对偏心率作级数展开,分别忽略三阶、四阶以上的高阶项,得到时间显式解,但仅适于参考轨道偏心率小于0.3的相对运动。文献[177]以圆轨道交会为背景,给出了无量纲形式的球坐标系相对运动方程的一阶解和二阶解。
几何法基于轨道要素描述相对运动,在参考航天器轨道坐标系建立相对运动模型,其精确模型有两种形式。一是通过坐标转换,以两航天器的12个绝对轨道要素为自变量描述[178]。二是利用单位球模型,用参考航天器的绝对轨道要素和追踪航天器的相对轨道要素描述[179]。这两种精确模型的本质相同,都是从绝对运动角度建立相对运动模型,适于描述任意偏心率及相对距离的相对运动,但形式复杂不便于揭示相对运动规律。常用的模型是在一定假设条件下的简化近似模型,依据相对距离可选择不同阶次的近似模型,最常见的是一阶近似模型(线性化模型)。
文献[180]基于现有模型提出了简化的相对运动模型。文献[181]基于经典轨道要素分析线性化引起的相对运动误差,提出了新的相对轨道要素用于卫星编队飞行构型设计。文献[182]通过消除密切约束和利用非密切轨道要素得到了用轨道要素差表示的相对运动方程,该模型利于研究一阶小扰动对相对轨道动力学的长期影响。文献[183]采用摄动法解析求得了考虑二阶非线性项时椭圆轨道相对运动模型的周期性条件和周期解。
综上所述:对多星相对轨道动力学技术,通常采用基于相对运动动力学方程的代数法和以轨道要素表示的相对运动模型为基础的几何法。代数法常用于相对运动制导与控制,几何法便于轨道设计和摄动分析。但两种方法在进行线性化处理时,可能会形成一定的模型误差,须根据具体的动力学精度要求研究相应的简化方法。
2.2 多星姿轨耦合动力学技术
在交会对接或在轨服务任务中,最终逼近和停靠段相对位置和姿态通常是强耦合的。传统上航天器相对运动建模常用姿态与轨道分开描述的方法,轨道参数用位置和速度坐标矢量或轨道六要素描述,而姿态参数采用方向余弦矩阵、欧拉角或四元数等描述。文献[184]基于轨道坐标系中相对轨道动力学模型和大角度姿态机动控制的姿态动力学模型,通过坐标变换矩阵建立了轨姿耦合数学模型,体现了姿态偏差对轨道运动的影响。文献[185]基于非线性轨道动力学方程和修正罗德里格斯参数表示的姿态运动方程,建立了六自由度的相对动力学模型,该模型考虑了耦合作用和非线性因素。文献[186]针对小卫星近距操作过程中姿态和轨道控制问题,建立了小卫星轨道坐标系中相对轨道动力学模型和姿态机动相对姿态动力学模型,并通过期望状态的设计,建立了姿轨耦合误差动力学模型。文献[187]在内编队卫星系统的全推力器方案设计中,构建了由姿态非线性和共用推力器引起的轨道姿态耦合的六自由度平动和转动动力学模型。文献[188]在追踪航天器本体坐标系中,联合相对轨道动力学模型和四元数姿态动力学模型,引入推进器配置矩阵,建立六自由度姿态和轨道一体化模型,避免了控制输入向追踪器本体坐标系中的转换。由上述文献可知:这些动力学建模均是在分别建立相对轨道动力学方程和相对姿态动力学方程的基础上,实现姿轨耦合误差动力学建模,但传统上姿态参数和轨道参数表示的不统一难以实现真正意义的姿轨耦合动力学建模。
部分学者研究了将姿态动力学和轨道动力学用同一参数描述的建模方法,建立了与航天器姿态欧拉动力学方程形式非常相似的轨道动力学方程,为利用成熟的刚体旋转运动学与动力学研究方法和相关理论进行航天器姿轨一体化研究及分析奠定了理论基础[189]。在此基础上,文献[190]用矢阵(vectrix)方法将航天器姿态运动和轨道运动统一到同一代数框架内,并建立了单个刚性航天器和N个编队航天器的姿态与轨道耦合动力学模型。文献[191]推导了基于对偶四元数的刚体航天器平动和转动组合的跟踪误差模型。文献[192]基于对偶四元数分别推导了交会对接最终段和两个航天器编队飞行的六自由度相对运动模型。文献[193]针对航天器运动姿轨耦合性问题,对基于螺旋理论得到的航天器运动模型,定性分析了近距离复杂操作过程中的姿轨耦合特性,基于对偶四元数获得了航天器相对运动一体化模型。
综上所述:传统航天器姿轨耦合动力学模型中,常用姿态与轨道分别描述的方法,轨道参数用位置和速度坐标矢量或轨道六要素描述,而姿态参数采用方向余弦矩阵、欧拉角或四元数等描述,其耦合性体现在坐标变换矩阵,表示形式不统一,无法实现完全意义的一体化建模,有一定的局限性,而基于对偶四元数和旋量进行姿轨耦合建模的方法可实现姿轨完全一体化建模。
2.3 多星相对位置控制技术
相对轨道控制主要是基于相对测量信息,对航天器质心施加外力,以改变其相对位置和相对速度,称为相对轨道控制,实现相对位置保持和接近,推力模式分为脉冲推力、连续推力、继电型推力(有限推力)。相对轨道控制主要包括绕飞控制、接近控制和悬停控制三种控制任务。
相对轨道控制较常用的方法有两种:一种是基于相对动力学状态方程的相对控制方法,状态方程包括C-W方程(仅适于近圆轨道)和T-H方程(可用于椭圆轨道)两种常用方程;另一种是基于相对轨道要素的相对控制方法。
在基于状态方程的相对控制方法中,文献[194]基于离散化的C-W方程设计了一种全状态的反馈控制器。文献[195]考虑C-W方程的模型误差,基于Lyapunov方法设计了编队卫星相对轨道保持的非线性输出反馈控制律,该控制律对模型参数不确定性和外界扰动有较强的鲁棒性。文献[196]将J2摄动包含到C-W方程中,得到了平均轨道相对状态与真实密切轨道相对状态间的线性化的状态转移矩阵,用相平面方法实现相对位置的控制。文献[197]基于T-H方程分别设计了二脉冲实现绕飞的控制方案和用于编队卫星构型保持的滑模控制律,使控制方法对摄动干扰、模型不确定等具鲁棒性。文献[198]针对编队飞行中多个从星飞行任务设计问题,采用伪谱同伦算法对其进行优化,获得了最优燃料转移轨道。
在基于相对轨道要素的相对控制方面,文献[199]针对分布式卫星编队的构型保持问题,考虑了多种摄动影响,设计了一种基于平均轨道要素的非线性闭环控制方法,该方法具有大范围稳定性的特点。文献[200]基于线性化的相对轨道要素方程,采用模型预测控制的方法,得到了编队构型保持的协同控制算法。文献[201]针对编队重构最优燃料消耗控制问题,设计了一种基于平均轨道要素的邻域最优反馈控制器。文献[202]针对编队卫星保持控制问题,基于相对轨道要素方程,采用闭环形式轨道传递优化技术规划脉冲推力序列,实现编队构型保持。
综上所述:在多星相对轨道控制中,基于状态方程的相对控制方法和基于相对轨道要素的控制方法是两种常用的方法,前者便于相对运动制导与控制的研究,而后者便于定量研究摄动影响和轨道设计。因此,需根据特定任务要求研究适用的控制方法。
2.4 多星姿轨耦合控制技术
航天器相对姿轨耦合控制与相对姿态及相对轨道单独控制方式不同,它依据航天器整体的运动特性,侧重于从系统和全局的角度设计控制器,如空间交会对接终端逼近、在轨服务空间机器人抓捕、多航天器的编队飞行等。
姿轨耦合控制问题研究前期主要针对稳定目标开展。滑模变结构具鲁棒性强的优点,在姿轨耦合控制中有广泛应用。文献[184]针对交会对接停靠阶段任务,轨道和姿态都采用具滑模的时间次优反馈控制律进行控制。文献[203]用输出反馈线性化法解耦编队航天器非线性的相对轨道和相对姿态动力学模型,然后用滑模控制与神经网络方法设计控制器。文献[195]用对偶数描述编队航天器的相对运动,分别设计了自适应的终端滑模控制器和有限时间控制器。为确保跟踪误差全局渐近收敛,文献[185]基于Lyapunov稳定性理论设计了姿轨耦合的非线性前馈控制律,该控制律具一定的鲁棒性。文献[204]设计了合成控制法,该法包含基于有限时间控制技术的反馈控制和基于非线性扰动观测技术的前馈补偿。文献[205]对有一个推力器和多个飞轮的编队航天器相对运动控制问题进行了研究,设计了两种解耦条件和两种方法求解期望的姿态,并采用高斯伪谱法将连续控制问题直接转为离散形式的非线性规划问题。文献[187]为实现编队卫星系统参数不确定条件下的状态稳定,采用自适应全状态反馈控制实现内编队卫星系统的姿态和轨道一体化控制。文献[206]研究了航天器平动速度和转动速度不可测的情况,根据位置和姿态信息,用高通滤波估计相对平动速度和转动速度,设计了非线性的输出反馈控制律。文献[207]引入了一种统一的同步结构用于编队飞行位置和姿态的同步与耦合控制,提出了分散化的跟踪控制律,通过压缩分析证明系统的稳定性。文献[208]针对轨道和姿态耦合时从星对主星轨迹的跟踪控制问题,设计了全局收敛的自适应控制器。
目前姿轨耦合控制主要集中于对失效翻滚目标特定部位的接近和停靠任务研究。文献[209]针对翻滚目标的接近机动问题,设计了滑模控制器和基于状态相关黎卡提方程控制器(SDRE)以解决非线性的六自由度控制问题。文献[210]针对翻滚目标接近的非线性相对位姿耦合控制问题,基于滚动优化设计了theta-D次优控制器,通过摄动法求得HJB方程的近似解,实现相对运动的姿轨协同控制,在跟踪期望轨迹实现临近悬停的同时还跟踪了目标的姿态。文献[211]提出一种面向对旋转目标空间操作的安全可靠的逼近策略及相应的控制方法,设计了基于退步控制理论的姿轨耦合退步控制器。文献[212]针对无控旋转目标的逼近问题,采用滑模变结构的控制方法,实现同步逼近相对运动参考轨迹和参考姿态。文献[213]针对大空间目标捕获和移除任务,提出用自适应滑模控制方法控制航天器的姿态和轨道,该方法能较好地解决参数不确定和外干扰的问题。文献[214]针对旋转目标的抓捕任务需求,利用面内相对运动轨迹的凸逼近特性,提出了飞越制导控制策略。文献[215]研究了自由飞行航天器和空间悬浮目标的运动同步问题,考虑重力梯度和其它未知但有界的干扰引起的干扰力矩,分别基于自适应控制理论和自适应反馈线性化方法设计了相对轨道和相对姿态的跟踪控制律,以保证追踪航天器与目标航天器间的相对位置矢量始终指向目标航天器对接口。针对自由翻滚目标接近过程的最优控制,文献[216]考虑了一个受限平面刚体运动,设计了一个接近翻滚卫星的前馈最优控制策略,实现了最小化时间/最优燃料消耗控制。文献[217]针对自由翻滚航天器的近距离最优交会问题,分别提供了一种用直接法-高斯伪谱法和虚拟域逆动力学法解决翻滚目标接触点逼近问题。
综上所述:对多星姿轨耦合控制问题,已从稳定目标的逼近抓捕任务转向失效旋转或翻滚目标的接近停靠任务,目前的逼近导引规划及控制主要针对合作目标开展了相应的理论研究;对非合作目标任务,综合最优方法的研究和在轨应用尚存在较大差距。特别是在翻滚目标的接近停靠任务中,由于翻滚目标接近停靠过程中的非线性特性和参数不确定性等因素,需深入对强鲁棒性自适应控制方法进行研究。
3 新型航天器动力学与控制技术
本章介绍了太阳帆航天器和绳系卫星两种新型航天器目前的在轨任务情况及其动力学与控制技术的研究现状。
3.1 太阳帆航天器
3.1.1 太阳帆航天器在轨任务
太阳帆帆面一般由厚2 μm的高反射薄膜构成,大尺寸帆面在轨展开后可通过捕获太阳光通量获得连续小推力。与传统航天器相比,太阳帆毫牛量级的连续光压力可突破任务设计时的燃料约束考虑,有广阔的应用前景。随着科技水平的进步,太阳帆航天器研究逐渐从理论走向了工程实际。1999年,世界第一个太阳帆航天器地面展开试验由欧空局(ESA)与德国宇航局(DLR)共同设计实现,设计的正方形太阳帆边长20 m,地面试验现场如图3所示[218-219]。之后NASA的Nano Sail-D太阳帆、Lightsail-1和Lightsail-2太阳帆相继问世,其中Lightsail-2太阳帆的任务目标是保持在日地系统平动点附近周期轨道以实现对太阳风暴的提前观测[220-221]。2010年,日本IKAROS太阳帆由日本宇航局JAXA成功发射,在世界上第一次实现了在轨光压加速飞掠火星,IKAROS太阳帆在轨实物如图4所示[222]。设计为正方形边长14 m的IKAROS太阳帆航天器成功获得了1.12 mN的光压力并在轨验证了其姿态轨道控制能力。IKAROS太阳帆的成功是太阳帆航天器技术的重大突破,显著推动了太阳帆航天器技术的研究及其在深空探测领域的工程应用。
3.1.2 太阳帆航天器姿态动力学与控制
太阳帆姿态控制是太阳帆航天器工程应用的前提,有重要的现实意义和理论价值。相较传统航天器,太阳帆航天器姿态控制的难点是其大尺寸薄膜帆面的存在导致其具显著的柔性特征,姿态调整和柔性结构振动会导致推力大小、方向发生改变,进而影响航天器的轨道机动[223]。因此,必须研究太阳帆柔性结构(大尺寸薄膜帆面和大尺度柔性杆)与姿态动力学的耦合关系和交互作用,并建立能反映太阳帆本质特征的刚柔耦合动力学模型,在此模型基础上设计能同时实现姿态镇定和柔性结构振动抑制的控制策略。
目前,已有的太阳帆航天器姿态动力学与控制研究多假设其为刚性结构,忽略或回避了其难以解决的柔性特征。普遍使用的太阳帆行航天器结构有两种:分别为DLR提出的万向节控制结构和美国喷气实验室(JPL)提出的小帆控制结构。已有研究者分析了太阳帆的光压与推力的函数关系,目前由MCINNES提出并已普遍应用的表达式只能适用于太阳帆航天器的平面模型[224]。文献[225]针对两种太阳帆航天器结构,提出了太阳辐射光压力模型和刚体动力学模型。文献[226]提出了太阳帆在光压作用下所有力和力矩的解析函数的一般模型。
已有的基于刚性模型的太阳帆姿态控制器设计方法包括自旋镇定、推力矢量控制、移动/倾斜帆面控制、变反射率控制等。但这些方法均未考虑太阳帆柔性持征。文献[223]在文献[225]刚体姿态动力学模型的基础上,考虑太阳帆的柔性特征,提出了具有刚柔耦合特征的非线性姿态动力学模型,并设计了LPV姿态控制器同时满足了姿态角镇定以及柔性模型的振动抑制,但并未考虑控制器输出饱和约束。因此,太阳帆姿态控制器设计难点集中表现在模型的非线性、需同时考虑姿态控制输出饱和约束,以及帆面柔性模态的振动抑制。
3.1.3 太阳帆航天器轨道动力学与控制
近年来,文献[67,227-228]对太阳帆轨道动力学进行了大量基础性研究,完成了太阳帆航天器不同任务的轨道动力学分析与设计。文献[219]计算并提出日地系统中太阳帆光压力可产生人工平动点,且可通过改变帆的结构以调整光压力的大小实现空间大范围的平动点重置。太阳帆航天器圆型限制性三体下,满足一定初始状态仍可获得条件稳定的Lissajous轨道和Halo轨道[67]。因为这些轨道的不稳定特征,在完成平动点轨道射入后须施加保持控制以防止航天器轨道发散。与传统航天器轨控不同,太阳帆航天器轨道控制是通过调整姿态角、帆面面积或帆面反射率改变光压力而间接实现的。
文献[229]在Hill模型中用基于近似化处理方法通过控制帆面姿态角和帆面面积设计实现了太阳帆航天器最优轨道控制器。文献[230]对太阳帆航天器悬浮轨道和平动点轨道动力学进行了研究,并设计了太阳帆航天器被动稳定控制,针对两帆结构的太阳帆航天器提出了反馈线性化控制律设计方法,通过调整姿态角实现轨道控制。文献[231]考虑近似化获得的线性时变系统设计了太阳帆轨道最优控制器,但控制器参数需通过不断求解时变系统的Riccati方程获得。文献[232]对姿态角幅值约束下的太阳帆航天器轨道控制问题进行了研究,设计了轨道保持最优控制器。文献[233]分析了太阳帆航天器Halo轨道的不稳定特性,采用离散寻优方法通过调整姿态角抑制轨道发散趋势,使太阳帆航天器保持在一类Halo族上。文献[234]为使太阳帆行星捕获终端轨道要素同时满足目标工作轨道的要求,提出了一种分段捕获策略及相应的联合解析最优控制律。太阳帆航天器轨道控制问题属于典型的强耦合非仿射非线性系统稳定问题,近似线性化方法本质上存在近似模型有效性问题和控制器收敛问题,且一般很难求出吸引区。近年来,部分直接处理非线性系统控制问题的先进控制器被引入太阳帆轨道控制。文献[235-236]提出了高阶非线性滑模控制器用以解决日地L2点平动点轨道上太阳帆航天器编队飞行控制任务,进一步将变结构模型参考自适应控制方法成功引入太阳帆航天器平动点轨道控制和编队飞行中,-定程度解决了太阳帆航天器平动点轨道稳定控制问题。
综上所述:太阳帆航天器可实现无推进剂推进,将深空探测器推进到太阳系深处,使探测器脱离黄道面到达太阳极轨进行对日观测,进入悬浮轨道等常规航天器难以实现,同时又有重大科学意义的非开普勒轨道,具广阔的应用前景。相较国外,我国的太阳帆航天器研究起步较晚,基础理论研究相对薄弱。目前对柔性太阳帆的控制大部分仅考虑姿轨耦合动力学建模与控制,当太阳帆的柔性对任务产生较大影响时,需进一步研究对其结构振动的控制,以及对太阳帆轨道-姿态-振动的耦合动力学建模与控制技术。太阳帆航天器轨道动力学与控制是太阳帆应用的关键技术之一,着眼我国太阳帆的发展需要及平动点轨道任务的实际需求,开展太阳帆航天器轨道动力学与控制技术研究有重要意义。
3.2 绳系卫星
绳系卫星系统动力学及控制问题亦非常复杂,当它被置于空间环境并与卫星耦合时极易产生一系列复杂的天平动及振动[237]。本节主要对二体绳系卫星系统和绳系卫星编队在释放、回收、平衡控制各个阶段的动力学特性,主要包括运动形式和主要影响因素、动力学建模、控制规律设计以及仿真分析等进行总结,为后续绳系卫星任务提供参考。
3.2.1 绳系卫星系统在轨任务
鉴于空间绳系卫星轻便、节能及可重复使用等特点,美国NASA、意大利航天局(ASI)、加拿大航天局(CSA)、美国海军研究实验室(NRL)、日本宇宙科学研究所(ISAS)和ESA等研究机构已进行了数十次绳系卫星在轨试验,结果见表1[238]。其中:TSS-1R,SEDS-1系统分别如图5、6所示。这些试验为扩大空间绳系技术的应用做出了巨大贡献,部分关键技术得以突破,甚至发现了未曾预料的科学结果。如系绳释放及回收技术、系绳切断、航天器再入、电动力学及绳系在轨生存能力等。由于绳系卫星系统是高度非线性的动力学系统,加之释放机构设计、在轨飞行环境的不确定性等因素,导致有数次任务未取得预期效果,这一定程度限制了绳系技术的应用。
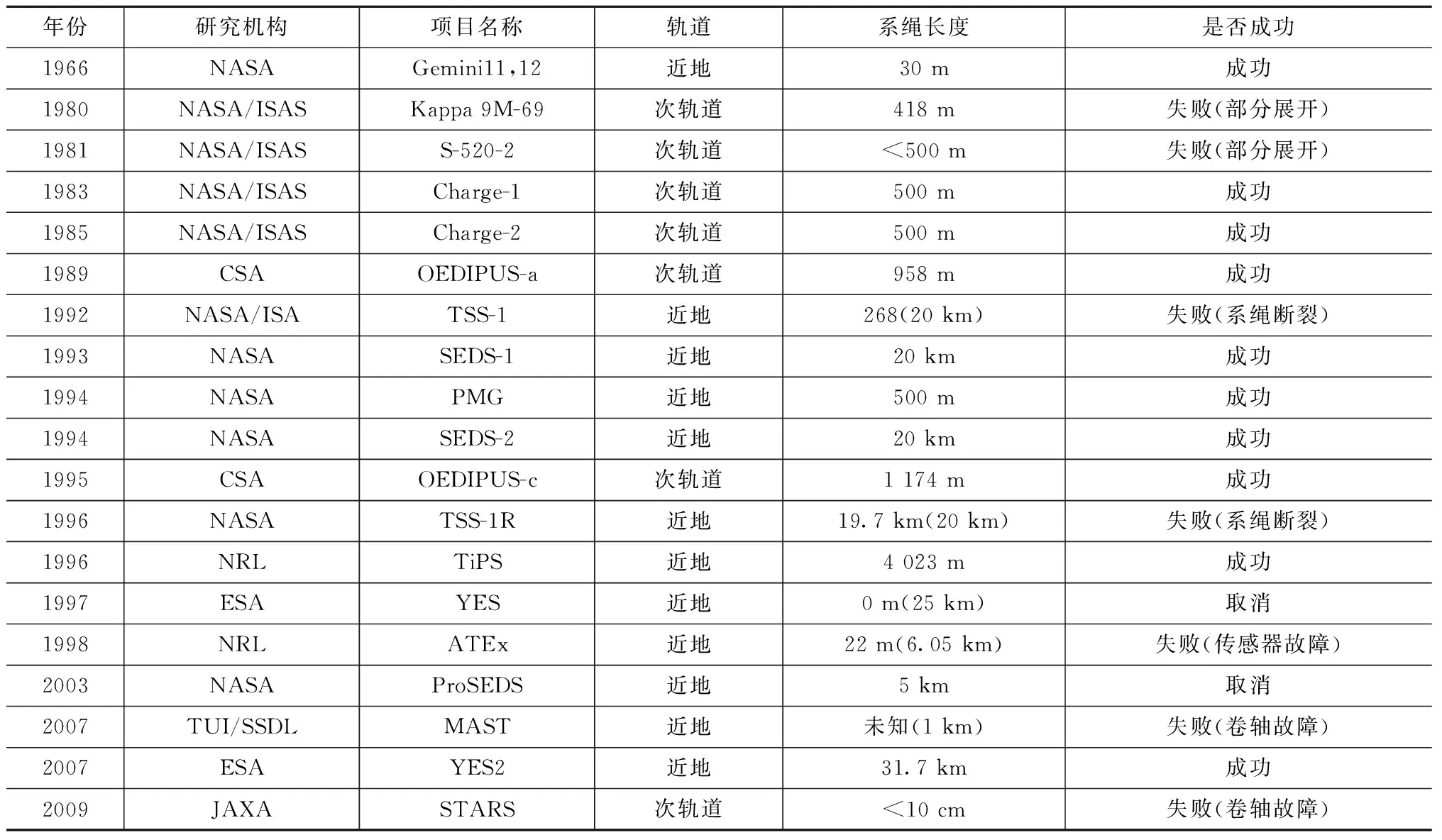
表1 历年绳系卫星系统在轨试验Tab.1 On-orbit experiments of tethered satellite system
3.2.2 二体绳系卫星动力学与控制
现有对绳系卫星系统的理论研究中,大多采用将卫星简化为质点,系绳简化为刚性杆的低自由度模型进行分析。文献[239]系统研究了两体绳系卫星系统建模、动力学与控制问题,分析了卫星的释放控制、相对平衡位置稳定性及系统混沌动力学。文献[240]对电动力绳系卫星系统进行了研究,分析了电动力能量输入所造成的不稳定因素,用渐近分析及数值方法分析了系统的周期运动,提出两种反馈控制算法并进行了评估。文献[241]针对电动力绳系卫星系统设计了混合控制策略,通过电动力和移动系绳系释放点抑制不稳定的高阶模态。文献[242]基于轨道面内的刚性系绳模型,通过反馈控制将电动力绳系卫星系统由一个平衡位置转移到另一个平衡位置。文献[243]对地磁场、系绳动力学、重力及电动力进行了建模,并分析了电动力作用对绳系卫星轨道要素的长期影响。文献[244]研究了系绳回收阶段二体绳系卫星系统的运动过程,设计了一个非线性控制律降低了系绳回收阶段振动幅值。文献[245]对绳系卫星系统在系绳指数展开率下的运动进行了分析,认为将绳系卫星沿垂直方向排列可能会避免后期振动。文献[246]考虑面内与面外的三维系绳展开控制问题,设计一种线性的拉力控制律达到了稳定。文献[247]采用截断Chebyshev级数估计系统状态变量,针对三维绳系子卫星系统的展开和回收设计了最优控制器。文献[248]研究了绳系近距离快速释放问题,提出了以一定初始速度释放子星并通过减速释放的方法。文献[249]对二体绳系卫星系统的子星回收过程中的非线性后退时域控制问题进行了研究,通过调节系绳张力和作用于子星的力矩实现了子星的稳定回收控制。文献[250]采用简单张力控制策略使其对圆轨道和近圆轨道绳系卫星系统的释放、滞留和回收过程都有较好的适应性。文献[251]研究了绳系卫星在轨运动中系绳参数的实时估计方法。
很多系绳卫星系统应用中,假设系绳为刚性绳与实际情况有较大出入,对系统的动力学建模与分析也不够精确,因此研究者开始对柔性系绳模型进行建模与分析。文献[252]考虑具有分布质量的柔性系绳模型,提出一种距离速率控制算法。文献[253]对上述模型进行改进,考虑系统面外运动,研究了电动力绳系卫星系统的平衡控制问题。文献[254]针对轨道面内的柔性系绳模型,设计反馈控制律将电动力绳系卫星系统由一个平衡位置转移到另一个平衡位置。文献[255]考虑了系绳的黏弹性、分布质量和空间位形,建立一种改进珠式模型描述了系绳的纵横向振动。文献[256]针对无限维的黏弹性二体绳系卫星系统提出了时变动力学模型。文献[257]针对绳系卫星的展开控制设计了数种控制器,基于黏弹性空间台球模型,利用系统的混乱特性,相较传统控制方法可使系统更快到达平衡状态。
3.2.3 绳系卫星编队动力学与控制
绳系卫星编队动力学与控制是一个相对较新的研究领域。绳系编队飞行系统相对无系绳编队系统的主要优势是:该种系统可通过调整系绳张力保持或改变队形,从而降低燃料消耗。现有理论研究多采用将绳系卫星简化为质点,系绳简化为刚性杆的低自由度模型进行分析。绳系卫星编队可有多种构型,大量研究者对不同构型的绳系卫星编队动力学进行了稳定性分析并得到了稳定构型。文献[258]借鉴圆轨道上轴对称旋转刚体的三类平衡态,研究了平面旋转绳系卫星编队系统的稳定性问题,并对一种面向地球的三维双四面体绳系卫星编队飞行系统进行了稳定性分析。文献[259]分别对面向地球的环状和三维双金字塔构型的绳系编队系统进行了动力学分析。文献[260]考虑系统旋转平面位于轨道面内及垂直于轨道面两种情况,研究了辐式绳系卫星编队飞行系统的动力学与稳定性问题,并将其研究结果扩展到三维双金字塔构型。文献[261]研究了椭圆轨道上三角形绳系卫星编队系统,得出了系统参数的平衡设计阈值,分析了系绳释放及回收对系统响应的影响。文献[262]在三体系统的平衡构型基础上,用延续算法确定了轨道平面内线形四体绳系编队系统的多种平衡构型。文献[263]研究了由三根无质量刚性杆连接的四体绳系卫星模型,并分析了两类四面体形的系统平衡构型。
在此基础上,研究者针对绳系卫星编队稳定构型讨论了构型保持或变换控制。文献[264]采用摄动法研究了线形绳系卫星编队系统的姿态动力学,提出通过一对电推进器改变系统旋转平面并设计了相应的开环控制律。针对空间科学任务SPECS(Submillimeter Probe of the Evolution of Cosmic Structures)需求,文献[265]研究了平面三角形绳系卫星编队飞行系统动力学,采用输入-状态反馈线性化方法设计了非线性跟踪控制器。文献[266]对已有的时滞反馈控制方法进行改进,与模型跟踪、模型解耦控制方法结合控制直连式三体绳系卫星编队系统的摆动。文献[267]随后将研究范围扩展到双金字塔型绳系卫星编队系统,通过改变系绳中电流控制系绳的摆动。文献[268]考虑轨道面内三角形旋转绳系卫星系统的最优控制问题,采用直接转换法分别对最短时间重定向、卫星释放及卫星回收三种不同任务设计了最优张力控制律和状态轨道。文献[269]研究了旋转绳系卫星编队系统的“圆形”运动及队形相似变换,得出相应的平衡条件,并将系绳收放机构、机械臂、推进器及反作用动量轮作为执行机构设计了协调控制律。文献[270]进一步考虑绳系卫星的姿态运动,基于同步思想的模型缩减方法对多体旋转绳系卫星编队系统动力学进行简化并设计了非线性鲁棒及自适应算法,进一步研究了只采用飞轮作为执行机构的欠驱动系统的控制问题。文献[271]用拉格朗日方法对直连式三体绳系卫星进行了动力学建模,分别针对集中和分散的动力学模型设计了二次型最优调节器。
文献研究表明:绳系卫星系统(包括动量交换绳系和电动力绳系)可实现无推进剂推进,提供各种离轨和再入功能,有广阔的应用前景。动力学与控制是空间绳系研究的两个重要内容,在当前研究中,多将系绳末端物体视为点质量,且不考虑系绳末端物体绕质心运动对系统动力学的影响。由于其复杂性,目前对弱张力绳系系统的研究非常罕见,弱张力绳系系统的运动较现模型假设更为复杂,起旋、展开回收时残余张力及各种外部摄动力和内部非线性因素都会明显影响系绳的运动。同时,关于多体绳系系统动力学的研究较少,对绳系系统的混沌运动几乎没有研究,这种运动会导致出现诸多不良影响。由于绳系具强非线性且运动过程中存在复杂的多场耦合问题,建立精确动力学模型并采用合适的控制策略成为亟待解决的问题。
4 结束语
本文综述了空间飞行器动力学与控制多方面的研究进展。目前空间飞行器的结构和功能越来复杂,逐渐向深空探测、单颗大型多功能的复杂构型卫星、多颗卫星编队和新型航天器等方向发展,由此激发了关于空间飞行器的动力学与控制在各领域研究的深入,研究范围涵盖了轨道动力学、姿态动力学、姿态控制和编队控制等领域。随着研究的深入,出现了以下新的研究重点及主要发展方向。
第一是深空探测的轨道动力学问题。对小行星探测或星际航行任务,由于空间飞行器在飞行过程中受到多天体的引力影响,后续需对椭圆轨道类型的三体问题进行深入研究。目前在该方面,国外针对日地平动点进行了大量研究,并在共线平动点附近开展了多个探测任务;国内研究主要针对地月L1和L2平动点,包括中心流形的各类轨道,其中嫦娥2号卫星进入了地月L2点的Lissajous轨道;后续研究需将其推广到更远的深空,特别是小天体任务中的平动点轨道研究。
第二是超大尺度柔性航天器的动力学建模与协同控制技术。由于超大尺度柔性航天器的柔性载荷需要在轨多次展开,结构中包含众多间隙旋转铰,且在轨飞行时受复杂外部环境影响,使间隙碰撞-柔体弹性-外部环境三者相互耦合,导致精确的动力学模型建立困难。同时,为保证柔性载荷的功能和性能,对柔性载荷的形面精度控制也提出了较高要求。在控制系统设计过程中,需同时考虑姿态指向控制和柔性载荷的形面保持控制,其实现更为困难和复杂。目前,在该方面国内外针对太阳翼或桁架结构等开展了动力学建模技术研究和挠性振动主动抑制技术研究,但研究成果较多集中于针对特定研究对象或基于理想假设的数值仿真研究。因此,后续需在超大尺度柔性航天器的在轨动力学建模技术和分布协同控制技术方面进行深入研究。
第三是敏捷卫星的机动控制技术。由于敏捷卫星的机动速度越来快、机动角度越来越大,并且存在飞行任务的不断切换,造成路径规划实时性要求更高,考虑的约束因素更多。同时,需解决姿态机动的快速性与高稳定度间的矛盾。目前,在该方面国内外针对刚、柔体卫星的快速机动快速稳定技术进行了大量理论与应用的探索,但受限于大角度机动与振动控制问题本身的复杂性,所适用的机动任务依然相对较简单,在技术与应用中仍有较大的探索空间。因此,后续需对多约束条件下的姿态路径规划技术、非零初始条件下的输入成型技术等进行深入研究。
第四是多星姿轨耦合动力学和控制技术。在多星在轨耦合动力学和控制技术中,对翻滚目标接近停靠过程中的动力学建模和控制面临巨大的困难,主要是由于翻滚目标的旋转和章动特性,再加上天线、帆板等附件的耦合运动,导致目标的动力学特性异常复杂。目前,国内外针对翻滚目标接近过程中的耦合动力学建模和控制问题开展了大量研究,但研究成果较多集中在基于理想假设的数值仿真研究。因此,后续需在翻滚目标捕获过程中姿轨耦合动力学建模和姿轨耦合控制方面开展深入研究。
第五是太阳帆航天器动力学与控制技术。太阳帆航天器存在轨道与姿态强耦合、柔性太阳帆复杂形变与振动问题,后续需在全柔性太阳帆航天器姿态轨道振动耦合动力学建模技术、拉格朗日点附近编队控制技术、引力拖车控制技术、日心悬浮轨道设计与控制技术、太阳帆逃逸地球轨道最优控制技术、太阳帆转移轨道最优控制技术、太阳帆与其它航天器的碰撞风险和提高太阳帆生存能力等方面进行深入研究。
第六是空间绳系卫星系统的动力学与控制技术。对空间绳系卫星,由于绳系具强非线性且运动过程中存在复杂的多场耦合问题,建立精确动力学模型设计控制律较难,后续需要考虑系绳连接体相互作用情况下,研究系绳连接体相对质心的运动;并对弱张力绳系系统进行研究,寻求一种精确、简单且可靠的控制系统;同时研究展开机构对系统的摄动影响,以及对混沌发生情况的预估和寻找消除混沌现象的手段。为将绳系系统理论用于实际任务,需在绳系卫星系统设计、绳系卫星动力学建模及控制、绳系卫星系统的安全操作、绳系卫星展开与回收方法、绳系卫星交会对接技术、地面演示试验与研究、绳系卫星与其它航天器的碰撞风险、提高绳系卫星系统生存能力和绳系卫星性能最优控制等方面进行深入研究。
[1] 刘林. 航天器轨道理论[M]. 北京: 国防工业出版社, 2000.
[2] 童科伟, 周建平, 何麟书. 近地卫星简化轨道预报方法研究[J]. 宇航学报, 2009, 30(4): 1327-1333.
[3] 刘林, 胡松杰, 王歆. 航天动力学引论[M]. 南京: 南京大学出版社, 2006: 204-230.
[4] YOSHIKAWA M, IKEDA H, YANO H, et al. Astrodynamics science about Itokawa, gravity and ephemeris[R]. AIAA, 2006-6658, 2006.
[5] WERNER R A. SCHEERES D J. Exterior gravitation of a polyhedron derived and compared with harmonic and mascon gravitation representations of asteroid 4 769 castalia[J]. Celestial Mechanics and Dynamical Astronomy, 1997, 65: 313-344.
[6] 崔平远, 乔栋. 小天体附近轨道动力学与控制研究现状与展望[J]. 力学进展, 2013, 43(5): 526-539.
[7] 李四平, 刘锦阳, 国凤林, 等. 轨道机动的时间-能量综合最优控制[J]. 宇航学报, 2010, 31(1): 137-142.
[8] 赵坚. 太阳同步(准)回归轨道卫星的轨道保持方法研究[J]. 中国空间科学技术, 2004, 24(4): 60-64.
[9] 李果. 同步轨道多星共位轨道保持技术研究[J]. 航天控制, 1997, 23(3): 73-80.
[10] 王信峰, 李言俊, 侯黎强. 基于Hill方程近地卫星模型预测轨道保持方法[J]. 系统仿真学报, 2008, 20(22): 6273-6277.
[11] 韩潮, 付红勋. 轨道维持与机动的最优控制[J]. 航天控制, 2000, 26(4): 40-46.
[12] FERNANDO A. 2011 Mars science laboratory mission design overview[J]. Earth & Space, 2010, 170(366): 873-897.
[13] 张晓文, 王大轶, 黄翔宇. 深空探测转移轨道自主中途修正方法研究[J]. 空间控制技术与应用, 2009, 35(4): 27-33.
[14] RAYMAN M D, VARGHESE P, LEHMAN D H, et al. Results from the Deep Space 1 technology validation mission[J]. Acta Astronautica, 2000, 9: 475-487.
[15] KUNINAKA H, KAWAGUCHI J I. Deep space flight of Hayabusa Asteroid Explorer[J]. Space Exploration Technologies, 2008, 6960: 1-10.
[16] LONDON H S. Change of satellite orbit plane by aerodynamic maneuvering[J]. Journal of the Aerospace Sciences, 1962, 29: 323-332.
[17] BRAUN R D, MANNING R M. Mars exploration entry, descent, and landing challenges[J]. Journal of Spacecraft and Rockets, 2007, 44(2): 310-323.
[18] LI S, JIANG X Q. Review and prospect of guidance and control for Mars atmospheric entry[J]. Progress in Aerospace Sciences, 2014, 69: 40-57.
[19] SAN MARTIN A M, WONG E C, LEE S W. The development of the MSL guidance, navigation, and control system for entry, descent, and landing[C]// 23rd AAS/AIAA Space Flight Mechanics Meeting. Kauai: AAS, 2013: 13-238.
[20] PRAKASH R, BURKHART P D, CHEN A, et al. Mars science laboratory entry, descent, and landing system overview[C]// Aerospace Conference. Montana: IEEE, 2008: 1-18.
[21] CHEN A, GRECO M, MARTIN-MUR T, et al. Approach and entry, descent, and landing operations for the Mars science laboratory mission[C]// 23rd AAS/AIAA Space Flight Mechanics Meeting. Kauai: AAS, 2013: 13-425.
[22] 孙泽洲, 贾阳, 张熇. 嫦娥三号探测器技术进步与推动[J]. 中国科学: 技术科学, 2013, 43(11): 1186-1192.
[23] 王大轶, 李铁寿, 马兴瑞. 月球探测器重力转弯软着陆的最优制导[J]. 自动化学报, 2002, 28(3): 385-390.
[24] 雷汉伦. 平动点、不变流形及低能轨道[D]. 南京: 南京大学, 2015.
[25] CANALIAS E, GOMEZ G, MARCOTE M, et al. Assessment of mission design including utilization of libration points and weak stability boundaries[D]. Barcellona: Universitat de Barcellona, 2004.
[26] 刘俊泽, 徐红兵, 崔雁. 嫦娥二号卫星飞日地L2点的轨道设计与实施: 中国宇航学会深空探测技术专业委员会第十届学术年会[C]// [S. l.]: 2013.
[27] 曲广吉, 程道生. 复合柔性结构航天器动力学模型的混合坐标法建模研究[J]. 航天器工程, 1998, 9(3): 33-38.
[28] 朱明. 奇异值分解(SVD)在多体系统动力学中的应用——对R/W体系的补充[J]. 力学季刊, 1987(4): 24-32.
[29] 苟兴宇, 马兴瑞, 王本利. 航天器动力学研究内容的层次结构[J]. 航天器工程, 2000, 9(1): 4-14.
[30] BALL R S. A treatise on the theory of screws[M]. Cambridge: Cambridge University Press, 1900.
[31] KANE T R, LEVINSON D A. The use of Kane’s dynamical equations in robotics[J]. International Journal of Robotics Research, 1983, 2(3): 3-21.
[32] RODRIGUEZ G, JAIN A, KREUTZ K. Spatial operator algebra for multibodysystem dynamics[J]. The Journal of the Astronautical Sciences, 1992, 40: 27-50.
[33] 孟占峰, 韩潮. 基于空间算子代数的航天器多体动力学递推实时仿真算法[J]. 航空学报, 2007, 28(S1): 49-56.
[34] 洪嘉振, 梁敏. 多刚体内碰撞数学模型及计算程序[J]. 力学学报, 1989, 21(4): 509-512.
[35] LIU J Y, LU H. Rigid-flexible coupling dynamics of three-dimensional hub-beams system[J]. Multibody System Dynamics, 2007, 18: 487-510.
[36] WINFREY R C. Elastic link mechanism dynamics[J]. ASME Journal of Engineering for Industry, 1971, 93: 268-272.
[37] KIM S S, HAUG E J. A recursive formulation for flexible multibody dynamics, part 2: closed-loop systems[J]. Computer Methods in Applied Mechanics and Engineering, 1989, 74: 251-269.
[38] PASCAL M. Some open problems in dynamic analysis of flexible multibody systems[J]. Multibody System Dynamics, 2001, 5: 315-334.
[39] MEIROVITCH L. Hybrid state equations of motion for flexible bodies in terms of quasi-coordinates[J]. Journal of Guidance, Control, and Dynamics, 1990, 14(5): 1008-1013.
[40] MODI V J. Attitude dynamics of sateiiltes with flexible appendages, a brief review[J]. Journal Spacecraft and Rocket, 1974, 11(11): 743-751.
[41] 刘延柱. 航天器姿态动力学[M]. 北京: 国防工业出版社, 1995.
[42] 黄文虎, 邵成勋. 多柔体系统动力学[M]. 北京: 科学出版社, 1996.
[43] NEWMARK N M. A method of computation for structural dynamics[J]. ASCE Journal of the Engineeing Mechanics Division, 1959, 85(3): 67-94.
[44] BATHE K J, WILSON E L. Numerical methods in finite element analysis[M]. Englewood: Printice-Hall, 1976.
[45] ASCHER U M, PETZOLD L R. Computer methods for ordinary differential equations and differential algebric equations[M]. Beijing: Science Press, 2009.
[46] 吴志桥. 非惯性系下柔性结构动力学研究[D]. 长沙: 国防科学技术大学, 2004.
[47] 吴锋, 高强, 钟万勰. 刚-柔体动力学方程的保辛摄动迭代法[J]. 应用数学和力学, 2014, 35(4): 341-352.
[48] HSIAO K M, YANG R T, LEE A C. A consistent finite element formulation for non-linear dynamic analysis of planar beam[J]. International Journal for Numerical Methods in Engineering, 1994, 37: 75-89.
[49] LWOEN G G, CHASSAPIS C C. The elastic behaviour of linkages[J]. Mechanism and Machine Theory, 1986, 21: 33-42.
[50] THOMPOSN B S, SUNG C K. A suvery of finite element techniques of mechanism design[J]. Mechanism and Machine Theory, 1986, 21(4): 351-359.
[51] WALLRAPP O, SCHWERTASSEK R. Representation of geometric stiffening in multibody system simulation[J]. International Journal for Numerical Methods in Engineering, 1991, 32: 1833-1850.
[52] ZHANG D J, HUSTON R L. On dynamic stiffening of flexible bodies having high angular velocity[J]. Mech Struct & Mach, 1996, 24(3): 313-329.
[53] LIU A Q, LIEW K M. Non-linear substructure approach for dynamic analysis of rigid-flexible multibody systems[J]. Computer Methods in Applied Mechanics and Engineering, 1994, 114: 79-396.
[54] 刘又午, 王树新, 王建明, 等. 复杂结构航天器的柔性多体动力学分析[J]. 航天器工程, 1998, 7(3): 45-52.
[55] HUSTON R L. Computer methods in flexible multibody dynamics[J]. International Journal for Numerical Methods in Engineering, 1991, 32: 1657-1668.
[56] GLADWELL G M L. Branch mode analysis of vibrating systems[J]. Journal of Sound and Vibration, 1964, 1(1): 41-59.
[57] YOO W S, HNAG E J. Dynamics of flexible mechanical systems using vibration and static corrected modes[J]. ASME J Mech, Transm, Autom, 1986, 108(3): 315-322.
[58] SHABANA A A. An absolute nodal coordinates formulation for the large rotation and deformation analysis of flexible bodies[R]. University of Illinois at Chicago, MBS96-1-UIC, 1996.
[59] 刘锦阳, 李彬, 洪嘉振. 作大范围运动的柔性梁的刚-柔耦合动力学[J]. 力学学报, 2006, 38(2): 276-282.
[60] 刘钺, 田强, 胡海岩. 基于绝对节点坐标的多柔体系统动力学高效计算方法[J]. 力学学报, 2010, 42(6): 1197-1205.
[61] 章仁为. 卫星轨道姿态动力学与控制[M]. 北京: 北京航空航天大学出版社, 1998: 298-316.
[62] 韩广才, 张耀良. 双自旋人造卫星的姿态动力学方程和稳定性研究[J]. 哈尔滨工程大学学报, 2004, 15(1): 94-99.
[63] REDMOND J, SILVERBERG L. Fuel optimal reorientation of axisymmetric spin-stabilized satellites[J]. Journal of Guidance, Control, and Dynamics, 1992, 16(1): 217-219.
[64] FRAITURE L. Slew calibration for spin-stabilized satellites[J]. Journal of Spacecraft and Rockets, 2000, 37(6): 784-787.
[65] CHERCHAS D B, HUGHES P C. Attitude stability of a dual-spin satellite with a large flexible solar array[J]. Journal of Spacecraft and Rockets, 1973, 10(2): 126-132.
[66] WERTZ J R. Spacecraft attitude determination and control[M]. Dordrecht: Kluwer Academic Publishers, 1978.
[67] WIE B. Space vehicle dynamics and control[M]. Reston: AIAA Education Series, 1998.
[68] 张银辉, 杨华波, 江振宇, 等. 基于干扰估计的航天器大角度姿态机动鲁棒次优控制[J]. 宇航学报, 2015, 36(10): 1148-1154.
[69] 刘付成, 朱东方, 宋婷, 等. 带大惯量运动部件卫星姿态高精度复合控制研究[J]. 上海航天, 2016, 33(6): 53-60.
[70] CACCAVALE F, VILLANI L. Output feedback control for attitude tracking[J]. Systems and Control Letters, 1999, 38(2): 91-98.
[71] EI-KHAZALI R, DECARLO R A. Output feedback variable structure controllers design[J]. Automatica, 1995, 31(6): 805-816.
[72] ZHENG Y. Output feedback variable structure adaptive control of a flexible spacecraft[J]. Acta Astronautica, 1999, 44(1): 11-22.
[73] SHEN Y, LIU C, HU H. Output feedback variable structure control for uncertain systems with input nonlinearities[J]. Journal of Guidance, Control, and Dynamics, 2000, 23(4): 762-764.
[74] 胡庆雷, 李理. 考虑输入饱和与姿态角速度受限的航天器姿态抗退绕控制[J]. 航空学报, 2015, 36(4): 1259-1266.
[75] TSIOTRAS P. Further passivity results for the attitude control problem[J]. IEEE Transactions on Automatic Control, 1998, 43(11): 1597-1600.
[76] CROUCH P E. Spacecraft attitude control and stabilization: applications of geometric control theory to rigid body models[J]. IEEE Transactions on Automatic Control, 1984, 29(4): 321-331.
[77] BROCKETT R W. Asymptotic stability and feedback stabilization[J]. Differential Geometric Control Theory, 1985, 6(1): 181-191.
[78] OUTBIB R, SALLET G. Stabilizability of the angular velocity of a rigid body revisited[J]. Systems and Control Letters, 1992, 18(2): 93-98.
[79] KRISHNAN H, REYHANOGLU M, MCCLAMROCH H. Attitude stabilization of a rigid spacecraft using two control torques: a nonlinear control approach based on the spacecraft attitude dynamics[J]. Automatica, 1994, 30(6): 1023-1027.
[80] 黄兴宏, 徐世杰. 欠驱动航天器的分段解耦姿态控制[J]. 宇航学报, 2007, 28(3): 531-535.
[81] CASAGRANDE D, ASTOLFI A, PARISINI T. Global asymptotic stabilization of the attitude and the angular rates of an underactuated non-symmetric rigid body[J]. Automatica, 2008, 44: 1781-1789.
[82] 宋道喆, 耿云海, 易涛. 零角动量欠驱动航天器逆最优稳定控制律设计[J]. 宇航学报, 2016, 37(6): 729-736.
[83] SAMSON C. Velocity and torque feedback control of a nonholonomic cart[C]// Proceedings of the International Workshop on Nonlinear and Adaptive Control: Issues in Robotics. Springer Verlag: [s. n.], 1991: 125-151.
[84] MORIN P, SAMSON C, POMET J B, et al. Time-varying feedback stabilization of the attitude of a rigid spacecraft with two controls[J]. Systems and Control Letters, 1995, 25: 375-385.
[85] MORIN P, SAMSON C. Time-varying exponential stabilization of a rigid spacecraft with two control torques[J]. IEEE Transactions on Automatic Control, 1997, 42(4): 528-534.
[86] 张佳为, 许诺, 伍少雄. 欠驱动航天器飞轮控制方法[J]. 宇航学报, 2016, 37(5): 552-561.
[87] 王冬霞, 贾英宏, 金磊, 等. 欠驱动航天器姿态稳定的分层滑模控制器设计[J]. 宇航学报, 2013, 34(1): 17-24.
[88] 马广富, 刘刚, 黄静, 等. 欠驱动航天器姿态调节滑模控制[J]. 哈尔滨工业大学学报, 2012, 44(9): 1-6.
[89] 屠善澄. 卫星姿态动力学与控制(二)[M]. 北京: 中国宇航出版社, 1998.
[90] ZHENG J S P, ALLEYNE B H. Optimal attitude control for three-axis stabilized flexible spacecraft[J]. Acta Astronautica, 2005, 56: 219-528.
[91] 蔡鹏, 王庆超. 基于自适应模糊观测器的挠性航天器主动振动抑制方法研究[J]. 宇航学报, 2009, 30(3): 890-894.
[92] 孙小松, 耿云海, 杨涤. 中继卫星H∞姿态稳定控制研究[J]. 航空学报, 2006, 27(3): 465-473.
[93] 李顺利, 李立涛, 杨旭. 柔性多体卫星自抗扰控制系统的研究[J]. 宇航学报, 2007, 28(4): 845-849.
[94] 李洋, 仇原鹰, 张军, 等. 一种挠性航天器的自适应姿态控制与振动控制[J]. 振动与冲击, 2009, 28(12): 178-182.
[95] 白圣建, 黄新生. 基于TS模糊区域模型的航天器姿态控制[J]. 控制工程, 2011, 18(6): 947-951.
[96] 王松, 崔平远, 张池平, 等. 柔性航天器姿态的在线神经网络控制[J]. 飞行力学, 1998, 16(2): 83-89.
[97] FERRI A A. Friction damping and isolation system[J]. Journal of Dynamics Systems, Measurement and Control, 1995, 117(2): 196-206.
[98] ANANDAKRISHNAN S M, CONNOR C T, LEE S, et al. Hubble space telescope solar array damper for improving control system stability[C]// IEEE Aerospace Conference Proceedings. [S. l.]: [s. n.], 2000: 261-276.
[99] 赵超, 周军, 周凤岐. 大型复合航天器的建模与分散控制技术[J]. 飞行力学, 1998, 16(3): 22-27.
[100] 林西强, 李东旭. 大型柔性空间结构的多级分散化振动控制[J]. 国防科技大学学报, 1996, 18(1): 23-28.
[101] 黄圳圭. 航天器姿态动力学[M]. 长沙: 国防科技大学出版社, 1997.
[102] ZHANG X M, EEDMAN A G. Optimal placement of piezoelectric sensors and actuators for controlled flexible linkage mechanisms[J]. Journal of Vibration and Acoustics, Transactions of the ASME, 2006, 128(2): 256-260.
[103] BRUANT I, PROSLIER L. Optimal location of actuators and sensors in active vibration control[J]. Journal of Intelligent Material System and Structures, 2005, 16: 197-206.
[104] SUNAR M, RAO S S. Thermo piezoelectric control design and actuator placement[J]. AIAA Journal, 1997, 35(2): 534-539.
[105] 周星德, 汪凤泉. 基于可靠性的框架结构作动器/传感器最优配置[J]. 东南大学学报(自然科学版), 2003, 33(6): 746-749.
[106] RYOU J K, PARK K Y, KIM S J. Electrode pattern design of piezoelectric sensors and actuators using genetic algorithms[J]. AIAA Journal, 1998, 36(2): 227-233.
[107] DHURI K D, SESHU P. Favorable locations for piezo actuators in plates with good control effectiveness and minimal change in system dynamics[J]. Smart Material and Structures, 2007, 16: 2526-2542.
[108] ALI R M, AGHIL Y K. Optimal positioning of piezoelectric actuators on a smart fin using bio-inspired algorithms[J]. Aerospace Science and Technology, 2007, 11: 174-182.
[109] HAO H N. Optimal number and placements of piezoelectric patch actuators in structural active vibration control[J]. Engineering Computations, 2004, 21(6): 651-665.
[110] TZOU H. Piezoelectric shells-distributed sensing and control of continua[M]. New York: Springer Science & Business Media, 2012.
[111] WANG D A, HUANG Y M. Modal space vibration control of a beam by using the feedforward and feedback control loops[J]. International Journal of Mechanical Sciences, 2002, 44(1): 1-19.
[112] 林建华. 结构模态控制的“溢出”问题及控制策略[J]. 华侨大学学报(自然科学版), 1999, 20(4): 366-371.
[113] SHAN J J, LIU H T, SUN D. Slewing and vibration control of a single-link flexible manipulator by positive position feedback[J]. Mechatronics, 2005, 15(4): 487-503.
[114] 仝西岳, 李东旭. 线性大系统的分散协同H∞状态反馈控制[J]. 东南大学学报(自然科学版), 2005, 35(S2): 48-52.
[115] LAPPAS V J, STEYN W H, UNDERWOOD C I. Attitude control for small satellite using control moment gyros[J]. Acta Astronautica, 2002, 51(1): 101-111.
[116] LAPPAS V J, OOSTHUIZEN P, MADLE P, et al. Design, analysis and in-orbit performance of the BILSAT-1 microsatellite twin CMG experimental cluster[C]// AIAA Guidance, Navigation, and Control Conference and Exhibit. Rhode Island: AIAA, 2004: 5246.
[117] WIE B, HEIBERG C, BAILEY D. Rapid multi-target acquisition and pointing control of agile spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(1): 96-104.
[118] CAO X, YUE C, LIU M, et al. Time efficient spacecraft maneuver using constrained torque distribution[J]. Acta Astronautica, 2016, 123: 320-329.
[119] DWYER T A W, SIRA-RAMIREZ H. Variable-structure control of spacecraft attitude maneuvers[J]. Journal of Guidance, Control, and Dynamics, 1998, 11(3): 262-270.
[120] GAO J, CAI Y. Adaptive finite-time control for attitude tracking of rigid spacecraft[J]. Journal of Aerospace Engineering, 2016, 29(4): 04016016.
[121] ALI I, RADICE G, KIM J. Backstepping control design with actuator torque bound for spacecraft attitude maneuver[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(1): 254-259.
[122] HOWLEY B. Genetic programming of near-minimum-time spacecraft attitude maneuvers[C]// Proceedings of the 1stAnnual Conference on Genetic Programming. Cambridge: MIT Press, 1996: 98-106.
[123] CHEN X J, STEYN W H. Robust combined eigenaxis slew manoeuvre[C]// AIAA Guidance, Navigation and Control Conference. Portland: AIAA, 1999: 4048.
[124] HAO T, MATUNAGA S. New sliding mode control approach for rapid attitude maneuver using control moment gyros[J]. Journal of Aerospace Engineering, 2015, 29(2): 06015001.
[125] JIKUYA I, FUJII K, YAMADA K. Attitude maneuver of spacecraft with a variable-speed double-gimbal control moment gyro[J]. Advances in Space Research, 2016, 58: 1303-1317.
[126] BILIMORIA K D, WIE B. Time-optimal three-axis reorientation of a rigid spacecraft[J]. Journal of Guidance, Control, and Dynamics, 1993, 16(3): 446-452.
[127] BAI X L, JUNKINS J L. New results for time-optimal three-axis reorientation of a rigid spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(4): 1071-1076.
[128] 刘刚. 应用控制力矩陀螺的卫星姿态机动控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2010.
[129] SHEN H J, TSIOTRAS P. Numerical approach for solving rigid spacecraft minimum time attitude maneuvers[J]. Journal of Guidance, Control, and Dynamics, 1990, 13(1): 38-45.
[130] ZHANG S, FRISWELL M I, WAGG D J, et al. Rapid path planning for zero-propellant maneuvers[J]. Journal of Aerospace Engineering, 2015, 29(3): 04015078.
[131] FLEMING A, SEKHAVAT P, ROSS I M. Minimum-time reorientation of a rigid body[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(1): 160-170.
[132] KARPENKO M, BHATT S, BEDROSSIAN N, et al. First flight results on time-optimal spacecraft slews[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(2): 367-376.
[133] MCLNNES C R, Large angle slew maneuvers with autonomous sun vector avoidance[J]. Journal of Guidance, Control, and Dynamics, 1994, 17(4): 875-877.
[134] WISNIEWSKIA R, KULCZYCKI P. Slew maneuver control for spacecraft equipped with star camera and reaction wheels[J]. Control Engineering Practice, 2005, 13: 349-356.
[135] RADICE G, CASASCO M, Time-varying potential function control for constrained attitude tracking[J]. Advances in Astronautical Sciences, 2005, 119(1): 555-574.
[136] AVANZINI1 G, RADICE G, ALI I. Potential approach for constrained autonomous manoeuvres of a spacecraft equipped with a cluster of control moment gyroscopes[J]. Journal of Aerospace Engineering, 2009, 223(3): 285-296.
[137] HABLANI H B. Attitude commands avoiding bright objects and maintaining communication with ground station[J]. Journal of Guidance, Control, and Dynamics, 1999, 22(6): 759-767.
[138] SINGH G, MACALA G, WONG E, et al. A constraint monitor algorithm for the Cassini spacecraft[C]// Proceedings of the AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 1997: 3526.
[139] FRAZZOLI E, DAHLEH M A, FERON E. A randomized attitude slew planning algorithm for autonomous spacecraft[R]. AIAA, 2001-4155, 2001.
[140] KIM Y, MESBAHI M. Quadratically constrained attitude control via semidefinite programming[J]. IEEE Transactions on Automatic Control, 2004, 49(5): 731-735.
[141] SPILLER D, ANSALONE L, CURTI F. Particle swarm optimization for time-optimal spacecraft reorientation with keep-out cones[J]. Journal of Guidance, Control, and Dynamics, 2015, 39(2): 312-325.
[142] 程小军, 崔祜涛, 徐瑞, 等. 几何约束下的航天器姿态机动控制[J]. 控制与决策, 2012, 27(5): 724-730.
[143] XU R, WU C, ZHU S, et al. A rapid maneuver path planning method with complex sensor pointing constraints in the attitude space[J]. Information Systems Frontiers, 2016, doc: 1007/s10796-016-9642-1.
[144] ZHAO Q, HUANG H. Multi-objective optimization of zero propellant maneuver using hybrid programming[J]. Acta Astronautica, 2015, 116: 154-160.
[145] BALLOIS S L, DUC G.H∞control of an earth observation satellite[J]. Journal of Guidance, Control, and Dynamics. 1996, 19(3): 628-635.
[146] MIRSHAMS M, KHOSROJERDI M, HASSANI M. Passive fault tolerant sliding mode attitude control for flexible spacecraft with faulty thrusters[J]. Proceedings of the Institution of Mechanical Engineers Part G: Journal of Aerospace Engineering, 2013, 228(12): 2343-2357.
[147] 于亚男, 胡存明, 贺从园, 等. 基于高阶滑模变结构的挠性航天器大角度姿态机动控制研究[J]. 上海航天, 2016, 33(3): 55-60.
[148] 刘敏, 徐世杰, 韩潮. 挠性航天器姿态机动直接自适应主动振动控制[J]. 北京航空航天大学学报, 2013, 39(3): 285-289.
[149] ZHONG C X, GUO Y, YU Z. A self-adjusting sliding-mode control based on RBF neural network for flexible spacecraft attitude[C]// IEEE International Conference on Information and Automation. Yinchuan: IEEE, 2013: 207-212.
[150] 陕晋军, 刘暾. 应用分力合成主动振动抑制方法的最优飞行器大角度机动控制策略[J]. 航空学报, 2002, 23(1): 62-65.
[151] PAI M C. Robust input shaping control for multi-mode flexible structures using neuro-sliding mode output feedback control[J]. Journal of the Franklin Institute, 2012, 349(3): 1283-1303.
[152] 胡恒建, 李英波, 施桂国,等. 空间站帆板驱动输入成型鲁棒控制[J]. 上海航天, 2016, 33(1): 13-17.
[153] SINGER N C, SEERING W P. Preshaping command inputs to reduce system vibration[J]. Journal of Dynamic Systems, Measurement, and Control, 1990, 112(1): 76-82.
[154] SINGHOSE W E, DEREZINSKI S, SINGER N. Extra-insensitive input shapers for controlling flexible spacecraft[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(2): 385-391.
[155] SINGHOSE W E. Command generation for flexible systems[D]. Cambridge: Massachusetts Institute of Technology, 1997: 285.
[156] 孔宪仁, 杨正贤, 叶东, 等. 基于输入成形的柔性航天器振动闭环抑制方法研究[J]. 振动与冲击, 2010, 29(3): 72-76.
[157] 施桂国, 朱庆华, 张子龙. 一种主动抑制太阳帆板挠性振动的控制策略研究[J]. 上海航天, 2016, 33(3): 61-70.
[158] 胡庆雷, 马广富. 基于滑模输出反馈与输入成形控制相结合的挠性航天器主动振动抑制方法[J]. 振动与冲击, 2007, 26(6): 133-138.
[159] ZHAO L, WU X, HAO Y, et al. A novel method of vibration suppression for multi-modal flexible spacecraft[C]// 33th Chinese Control Conference. Nanjing: [s. n.], 2014: 8822-8825.
[160] 苗双全, 丛炳龙, 刘向东. 基于输入成形的挠性航天器自适应滑模控制[J]. 航空学报, 2013, 34(8): 1906-1914.
[161] ZHONG C, GUO Y, YU Z, et al. Finite-time attitude control for flexible spacecraft with unknown bounded disturbance[J]. Transactions of the Institute of Measurement and Control, 2016, 38(2): 240-249.
[162] VECIANA1 J M, CARDONA1 S, CATALP. Minimizing residual vibrations for non-zero initial states: application to an emergency stop of a crane[J]. International Journal of Precision Engineering and Manufacturing, 2013, 14(11): 1901-1908.
[163] 雷拥军, 谈树萍, 刘一武. 一种航天器姿态快速机动及稳定控制方法[J]. 中国空间科学技术, 2010, 30(5): 48-53+58.
[164] SINGHOSE W, BIEDIGER E, OKADA H. Control of flexible satellites using analytic on-off thruster commands[R]. AIAA, 2003-5333, 2003.
[165] JUNKINS J L, RAHMAN Z, BANG H. Near minimum-time maneuvers of flexible vehicles: a liapunov control law design method[J]. Mechanics and Control of Large Flexible Structures, Progress in Astronautics and Aeronautics, 1990, 129: 565-593.
[166] 刘德庆, 彭仁军, 张子龙. 基于路径规划和输入成型的挠性航天器振动控制方法[J]. 上海航天,2014, 31(4): 41-72.
[167] KIM J J, AGRAWAL B N. Experiments on Jerk-limited slew maneuvers of a flexible spacecraft[R]. AIAA, 2006-6187, 2006.
[168] FARRENKOPF R L. Optimal open-loop maneuver profiles for flexible spacecraft[J]. Journal of Guidance and Control, 1979, 2(6): 491-498.
[169] 于亚男, 李克勇, 陈海朋, 等. 挠性航天器大角度快速机动复合控制[J]. 航天控制, 2016, 34(4): 36-41.
[170] BIAGIOTTI L, MELCHIORRI C. FIR filters for online trajectory planning with time-and frequency-domain specifications[J]. Control Engineering Practice, 2012, 20: 1385-1399.
[171] 杨乐平, 朱彦伟, 黄焕. 航天器相对运动轨迹规划与控制[M]. 长沙: 国防工业出版社, 2010: 26-28.
[172] 李俊峰, 高云峰, 宝音贺西, 等. 卫星编队飞行动力学与控制研究[J]. 力学与实践, 2002, 24(2): 1-6.
[173] ALFRIEND K T, SCHAUB H, GIM D W. Gravitational perturbations nonlinearity and circular orbit on formation flying control strategies[J]. Guidance and Control, 2000: 139-158.
[174] 龚胜平, 李俊峰, 宝音贺西. 小天体伴飞脉冲控制[J]. 中国空间科学技术, 2013, 33(3): 15-21.
[175] CARTER T E. Linearized impulsive rendezvous problem[J]. Journal of Optimization Theory and Applications, 1995, 86(3): 553-584.
[176] VADDI S S, VADALI S R, ALFRIEND K T. Formation flying: accommodating nonlinearity and eccentricity perturbations[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(2): 214-223.
[177] KARLGAARD C D, LUTZE F H. Second-order equations for rendezvous in a circular orbit[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(3): 499-501.
[178] 高云峰, 宝音贺西, 李俊峰. 卫星编队飞行的动力学特性与相对轨道构形仿真[J]. 清华大学学报(自然科学版), 2002, 42(4): 458-461.
[179] SENGUPTA P, VADALI S R. ALFRIEND K T. Modeling and control of satellite formations in high eccentricity orbits[J]. Journal of the Astronautical Sciences, 2004, 52(1-2): 149-168.
[180] SCHAUB H, ALFRIEND K T. Hybrid cartesian and orbit element feedback law for formation flying spacecraft[J]. Journal of Guidance, Navigation, and Control, 2002, 25(2): 387-393.
[181] 肖业伦, 张晓敏. 编队飞行卫星群的轨道动力学特性与构型设计[J]. 宇航学报, 2001, 22(4): 7-12.
[182] GURFIL P. Generalized solutions for relative spacecraft orbits under arbitrary perturbations[J]. Acta Astronautica, 2007, 60: 61-78.
[183] 曹静, 袁建平, 罗建军. 椭圆轨道非线性相对运动模型的周期解与应用[J]. 中国空间科学技术, 2013, 33(3): 37-45.
[184] 彭冬亮, 荆武兴, 徐世杰. 停靠阶段轨道姿态耦合动力学与控制研究[J]. 飞行力学, 2002, 20(1): 33-37.
[185] 铁钰嘉, 杨伟, 岳晓奎. 航天器姿轨耦合非线性同步控制[J]. 计算机仿真, 2012, 29(3): 126-131.
[186] 杨佳, 朱战霞, 张艳召. 绕飞监测小卫星姿轨联合自适应控制研究[J]. 飞行力学, 2008, 26(5): 59-62.
[187] 吉莉. 内编队重力场测量卫星系统控制方法研究[D]. 长沙: 国防科学技术大学, 2012.
[188] 廖飞, 季海波, 解永春. 追踪器本体坐标系下航天器姿轨一体化控制律设计[J]. 控制与决策, 2015, 30(9): 1679-1684.
[189] JUNKINS J L, TURNER J D. On the analogy between orbital dynamics and rigid body dynamics[J]. Journal of the Astronautical Sciences, 1979, 27(4): 345-358.
[190] PLOEN S R, HADAEGH F Y, SCHARF D P. Rigid body equations of motion for modeling and control of spacecraft formations-part 1: absolute equations of motion[C]// Proceeding of the 2004 American Control Conference. Boston: [s. n.], 2004: 3646-3653.
[191] ZHANG F, DUAN G R. Robust integrated translation and rotation finite-time maneuver of a rigid spacecraft based on dual quaternion[C]// AIAA Guidance, Navigation, and Control Conference. Portland: AIAA, 2011: 6396.
[192] 王剑颖, 梁海朝, 孙兆伟. 基于对偶四元数的相对耦合动力学与控制[J]. 宇航学报, 2010, 31(7): 1711-1717.
[193] 朱战霞, 马家瑨, 樊瑞山. 航天器相对运动姿轨耦合特性研究[J]. 西北工业大学学报, 2015, 33(6): 887-891.
[194] KAPILA V, SPARKS A G, JAMES M B. Spacecraft formation flying: dynamics and control[J]. Journal of Guidance, Control, and Dynamics, 2000, 23(3): 561-564.
[195] QI G Y. Nonlinear dynamics and output feedback control of multiple spacecraft in elliptical orbits[C]// American Control Conference, Proceedings of the 2000. Chicago: IEEE, 2000, 2: 839-843.
[196] KUMAR B S, EYER J K. Averaged relative states for spacecraft formation control in the presence ofJ2disturbances[J]. Acta Astronautica, 2012, 77: 61-67.
[197] 王兆魁, 张育林. 分布式卫星精确构形保持变结构控制[J]. 航天控制, 2005, 23(6): 27-30.
[198] 岳晓奎, 段逊. 基于伪谱同伦算法的编队卫星任务设计研究[J]. 上海航天, 2016, 33(6): 44-50.
[199] 刘少然, 曾国强. 编队飞行航天器平均轨道根数非线性控制研究[J]. 中国空间科学技术, 2005, 25(5): 24-61.
[200] 曹喜滨, 贺东雷. 摄动椭圆参考轨道编队相对运动方程[J]. 吉林大学学报(工学版), 2009, 39(1): 234-239.
[201] HAMEL J F, LAFONTAINE J. Neighboring optimum feedback control law for earth-orbiting formation-flying spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(1): 290-299.
[202] NO T S, LEE J G, Jr COCHRAN J E. Spacecraft formation-keeping using a closed-form orbit propagator and optimization technique[J]. Acta Astronautica, 2009, 65: 537-548.
[203] BAE J, KIM Y, PARK C. Spacecraft formation flying control using sliding mode and neural networks controller[C]// AIAA Guidance, Navigation, and Control Conference. Chicago: AIAA, 2009: 5671.
[204] SUN H B, LI S H, FEI S M. A composite control scheme for 6 DOF spacecraft formation control[J]. Acta Astronautica, 2011, 69: 595-611.
[205] WU Y H, CAO X B, XING Y J, et al. Relative motion decoupled control for spacecraft formation with coupled translational and rotational dynamics[C]// International Conference on Computer Modeling and Simulation. [S. l.]: [s. n.], 2009: 63-68.
[206] WONG H, PAN H Z, KAPILA V. Output feedback control for spacecraft formation flying with coupled translation and attitude dynamics[C]// Proceedings of the American Control Conference. Portland: [s. n.], 2005: 2419-2426.
[207] CHUANG S J, AHSUN U E, SLOTINE J J. Application of synchronization to formation flying spacecraft: Lagrangian approach[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(2): 512-526.
[208] PAN H, KAPILA V. Adaptive nonlinear control for spacecraft formation flying with coupled translational and attitude dynamics[C]// Proceedings of 40th IEEE Conference on Decision and Control. New York: Inst of Electrical and Electronics Engineers, 2001: 2057-2062.
[209] STANSBERY D T, CLOUTIER J R. Position and attitude control of a spacecraft using the state-dependent riccati equation technique[C]// Proceedings of the American Control Conference. Chicago: IEEE, 2000: 1867-1871.
[210] 李鹏, 岳晓奎, 袁建平. 基于θ-D方法的在轨操作相对姿轨耦合控制[J]. 中国空间科学技术, 2012, 32(4): 8-14.
[211] 李鹏, 岳晓奎, 袁建平. 对翻滚非合作目标终端逼近的姿轨耦合退步控制[J]. 哈尔滨工业大学学报, 2013, 45(1): 94-100.
[212] 李九人, 李海阳, 唐国金. 对无控旋转目标逼近的自适应滑模控制[J]. 宇航学报, 2011, 32(4): 816-822.
[213] 宋斌, 马广富, 李传江. 基于自适应滑模方法的航天器位置与姿态控制[J]. 哈尔滨工业大学学报, 2008, 40(9): 1353-1357.
[214] SHUICHI M, STEPHEN J, STEVEN D, et al. Approach planning and guidance for uncontrolled rotating satellite capture considering collision avoidance[C]// The 7th International Symposium on Artificial Intelligence, Robotics and Automation in Space. [S. l.]: [s. n.], 2003: i-SAIRAS.
[215] SUBBARAO K, WELSH S. Nonlinear control of motion synchronization for satellite proximity operations[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1284-1294.
[216] MA Z, MA O, SHASHIKANTH B N. Optimal approach to and alignment with a rotating rigid body for capture[J]. Journal of the Astronautical Sciences, 2007, 55(4): 407-419.
[217] GEORGE B, OLEG Y, MARCELLO R. Formulation and analysis of matching points of interest in two-spacecraft for optimal rendezvous[R]. AIAA, 2009-5669, 2009.
[218] SEBOLDT W, LEIPOLD M, REZAZAD M, et al. Ground-based demonstration of solar sail technology[C]// 51st International Astronautical Congress. Rio de Janeiro: [s. n.], 2000: IAF-00-S.6.
[219] MCINNES C R, MACDONALD M, HUGHES G. Mars sample return: technical assistance in the study of science payloads transported through solar sailing, technical note 1[R]. ESA: ES-TEC 16534/02/NL/NR, 2003.
[220] JOHNSON L, WHORTON M, HEATON A, et al. A solar sail demonstration mission[J]. Acta Astronautica, 2011, 68(5): 571-575.
[221] BIDDY C, SVITEK T. Lightsail-1 solar sail design and qualification[C]// Proceedings of the 41st Aerospace Mechanisms Symposium. Pasadena: Jet Propulsion Laboratory, National Aeronautics and Space Administration, 2012: 451-463.
[222] TSUDA Y, MORI O. FUNASE R, et al. Achievement of IKAROS-Japanese deep space solar sail demonstration mission[J]. Acta Astronautica, 2013, 82(2): 183-188.
[223] 张洋. 太阳帆航天器姿态控制与轨迹优化研究[D]. 合肥: 中国科学技术大学, 2010.
[224] PRUSSING J E. Solar sailing: technology, dynamics, and mission applications[J]. Journal of Guidance, Control, and Dynamics, 2000, 23(4): 768-778.[225] WIE B. Solar sail attitude control and dynamics, part II[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(4): 536-544.
[226] RIOS-REYES L, SCHEERES D J. Generalized models for solar sails[J]. Journal of Spacecraft and Rockets, 2005, 42(1): 182-185.
[227] MCINNES C R, BROWN J C. The dynamics of solar sails with a non-point source of radiation pressure[J]. Celestial Mechanics and Dynamical Astronomy, 1990, 49(3): 249-264.
[228] BAOYIN H, MCINNES C R. Solar sail Halo orbits at the sun-earth artificial L1 point[J]. Celestial Mechanics and Dynamical Astronomy, 2006, 94(2): 155-171.
[229] BOOKLESS J, MCINNES C. Control of Lagrange point orbits using solar sail propulsion[J]. Acta Astronautica, 2008, 62(2): 159-176.
[230] 龚胜平. 太阳帆航天器动力学与控制研究[D]. 北京: 清华大学, 2009.
[231] BIGGS J, MCINNES C, WATERS T. Stabilizing periodic orbits above the elliptic plane in the solar sail 3-body problem: Proceedings of 59th International Astronautical Congress[C]// Glasgow: 2008.
[232] 张辉. 太阳帆航天器轨道动力学与控制研究[D]. 合肥: 中国科学技术大学, 2014.
[233] FARRES A, JORBA A. Station keeping of a solar sail around a Halo orbit[J]. Acta Astronautica, 2014, 94(11): 527-539.
[234] 史晓宁, 荣思远, 白瑜亮. 太阳帆航天器行星分段捕获控制方法研究[J]. 上海航天, 2016, 33(2): 87-93.
[235] SHAHID K, KUMAR K D. Formation control at the sun-earth L2 libration point using solar radiation pressure[J]. Journal of Spacecraft and Rockets, 2010, 47(4): 614-626.
[236] SHAHID K, KUMAR K D. Multiple spacecraft formation reconfiguration using solar radiation pressure[J]. Acta Astronautica, 2014, 103(11): 269-281.
[237] KUMAR K D. Review of dynamics and control of nonelectrodynamic tethered satellite systems[J]. Journal of Spacecraft and Rockets, 2006, 43(4): 705-720.
[238] KRUIJFF M, VAN DER HEIDE E J, OCKELS W J. Data analysis of a tethered spaceMail experiment[J]. Journal of Spacecraft and Rockets, 2009, 46(6): 1272-1287.
[239] KRUPA M, POTH W, SCHAGERL M, et al. Modelling, dynamics and control of tethered satellite systems[J]. Nonlinear Dynamics, 2006, 43(1-2): 73-96.
[241] WILLIAMS P, WATANABE T, BLANKSBY C, et al. Libration control of flexible tethers using electromagnetic forces and movable attachment[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(5): 882-897.
[242] MANKALA K K, AGRAWAL S K. Equilibrium-to-equilibrium maneuvers of rigid electrodynamic tethers[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(3): 541-545.
[243] LANOIX E L M, MISRA A K, MODI V J, et al. Effect of electrodynamic forces on the orbital dynamics of tethered satellites[J]. Journal of Guidance, Control, and Dynamics, 2005, 28(6): 1309-1315.
[244] CHERNOUS'KO F L. Dynamics of retrieval of a space tethered system[J]. Journal of Applied Mathematics and Mechanics, 1995, 59(2): 165-173.
[245] PELAEZ J. On the dynamics of the deployment of a tether from an orbiter: partⅡ exponential deployment[J]. Acta Astronautica, 1995, 36(6): 313-335.
[246] KUMAR K, PRADEEP S. Strategies for three dimensional deployment of tethered satellites[J]. Mechanics Research Communications, 1998, 25(5): 543-550.
[247] JIN D P, HU H Y. Optimal control of a tethered subsatellite of three degrees of freedom[J]. Nonlinear Dynamics, 2006, 46(1-2): 161-178.
[248] 刘莹莹, 周军. 近距离绳系卫星动力学与释放方法研究[J]. 系统仿真学报, 2008, 20(20): 5642-5645.
[249] 王晓宇, 文浩, 金栋平. 考虑姿态的绳系卫星后退时域回收控制[J]. 力学学报, 2010, 42(5): 919-925.
[250] 钟睿, 徐世杰. 可变绳长绳系卫星系统的一种简单张力控制策略[J]. 中国空间科学技术, 2009, 29(6): 66-73.
[251] 何勇, 梁斌, 徐文福, 等. 绳系卫星系绳参数的实时估计方法[J]. 哈尔滨工业大学学报, 2010, 42(7): 1033-1037.
[252] YU S H. Dynamic model and control of mass-distributed tether satellite system[J]. Journal of Spacecraft and Rockets, 2002, 39(2): 213-218.
[253] ZHOU X, LI J F, BAOYIN H X, et al. Equilibrium control of electrodynamic tethered satellite systems in inclined orbits[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(6): 1451-1454.
[254] MANKALA K K, AGRAWAL S K. Equilibrium-to-equilibrium maneuvers of flexible electrodynamic tethers in equatorial orbits[J]. Journal of Spacecraft and Rockets, 2006, 43(3): 651-658.
[255] 刘壮壮, 宝音贺西. 基于非线性单元模型的绳系卫星系统动力学[J]. 动力学与控制学报, 2012, 10(1): 21-26.
[256] 余本嵩, 文浩, 金栋平. 时变自由度绳系卫星系统动力学[J]. 力学学报, 2010, 42(5): 926-932.
[257] BARKOW B, STEINDL A, TROGER H. A targeting strategy for the deployment of a tethered satellite system[J]. IMA Journal of Applied Mathematics, 2005, 70(5): 626-644.
[258] TRAGESSER S G, TUNCAY A. Orbital design of earth-oriented tethered satellite formations[J]. Journal of the Astronautical Sciences, 2005, 53(1): 51-64.
[259] WILLIAMS T, MOORE K. Dynamics of tethered satellite formations[J]. Advances in the Astronautical Sciences, 2002, 112: 1219-1235.
[260] PIZARRO-CHONG A, MISRA A K. Dynamics of a multi-tethered satellite formation[C]// AIAA/AAS Astrodynamics Specialist Conference and Exhibit. [S. l.]: AIAA/AAS, 2004: 5308.
[261] KUMAR K D, YASAKA T. Rotating formation flying of three satellites using tethers[J]. Journal of Spacecraft and Rockets, 2004, 41(6): 973-985.
[263] GUERMAN A D, SMIRNOV G, PAGLIONE P, et al. Stationary configurations of a tetrahedral tethered satellite, formation[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(2): 424-428.
[264] BOMBARDELLI C, LORENZINI E C, QUADRELLI M B. Retargeting dynamics of a linear tethered interferometer[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(6): 1061-1067.
[265] KIM M, HALL C D. Control of a rotating variable-length tethered system[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(5): 849-858.
[266] KOJIMA H, IWASAKI M, FUJII H A, et al. Nonlinear control of librational motion of tethered satellites in elliptic orbits[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(2): 229-239.
[267] KOJIMA H, SUGIMOTO T. Nonlinear control of a double pendulum electrodynamic tether system[J]. Journal of Spacecraft and Rockets, 2007, 44(1): 280-284.
[268] WILLIAMS P. Optimal deployment/retrieval of a tethered formation spinning in the orbital plane[J]. Journal of Spacecraft and Rockets, 2006, 43(3): 638-650.
[269] MORI O, MATUNAGA S. Formation and attitude control for rotational tethered satellite clusters[J]. Journal of Spacecraft and Rockets, 2007, 44(1): 211-220.
[270] CHUNG S J, SLOTINE J J E, MILLER D W. Nonlinear model reduction and decentralized control of tethered formation flight[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(2): 390-400.
[271] CHANG I, PARK S Y, CHOI K. Nonlinear attitude control of a tether-connected multi-satellite in three-dimensional space[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4): 1950-1968.
Review of Dynamics and Control Study of Spacecraft
LIU Fu-cheng1, 2, ZHU Dong-fang1, 2, HUANG Jing1, 2
(1. Shanghai Key Laboratory of Aerospace Intelligent Control Technology, Shanghai 201109, China;2. Shanghai Institute of Spaceflight Control Technology, Shanghai 201109, China)
In this paper, the recent development and research status of spacecraft dynamics and control were introduced. The basic issues in the study of single-satellite dynamics and control technology, multi-satellite dynamics and control technology, and advanced spacecraft (solar sail spacecraft and tethered satellite) dynamics and control technology were reviewed. The research methods and archivements in these areas were summarized. Finally, the lucubration and prospects for problem of dynamics and control of spacecraft were discussed, which were such as orbit dynamics of deep space exploration, dynamics modeling and joint control technology of ultra-size flexible spacecraft, maneuvering control technology of agile satellite, attitude and orbit coupling dynamics and control of multi-satellite, dynamics and control technology of solar sail spacecraft, and dynamics and control technology of tethered satellites system.
spacecraft; dynamics; orbit control; attitude control; rigid body; flexibility; attitude and orbit coupling; agile satellite; solar sail spacecraft; tethered satellite
1006-1630(2017)02-0001-29
2017-02-24;
2017-03-13
上海市自然科学基金资助(16ZR1415700);上海市科技人才计划资助(14XD1421400);上海市青年科技英才扬帆计划资助(14YF1414500,15YF1405200,17YF1408400)
刘付成(1973—),男,博士,研究员,主要从事航天器控制系统设计和研究。
V412.4;V448.2
A
10.19328/j.cnki.1006-1630.2017.02.001