关于PIR竖放时的感知规律和应用的探索
2017-04-25赵俊江张会新
赵俊江,张会新*,卢 云
(1.中北大学电子测试技术国家重点实验室,太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原 030051)
关于PIR竖放时的感知规律和应用的探索
赵俊江1,2,张会新1,2*,卢 云1,2
(1.中北大学电子测试技术国家重点实验室,太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,太原 030051)
在探索PIR传感器基本探测规律实验中,发现PIR竖直放置时,其对目标的感应波形变化与最初我们推测与水平放置感知规律一致的想法不同,因此针对其竖直放置的情况通过改变不同目标的运动轨迹做了全面而具体的实验,最后实验结果证实了我们当时的发现。这个发现不仅让我们对PIR的性质有了更深层次的认识和了解,而且该性质拓宽了PIR的应用领域,对PIR应用普及有非常高的利用价值。
传感器原理;竖放感知规律;实验规律提取;双元热释电红外传感器;原理应用
热释电红外传感器是一种被动式传感器,靠接收人体辐射的红外线进行检测,并以电压信号的形式表示出来。目前热释电红外传感器多用于各种自动化控制、防盗报警、来客告知及非接触开关等红外领域。双元热释电红外传感器可用于检测周围环境中的红外辐射信号,并且具有体积小、成本低、功耗低和灵敏度高等特点,作为价格昂贵的图像及热成像红外设备的替代品,廉价又可以灵活搭建的分布式红外传感器网络,已经开始被用来取代视频跟踪。
经过相关资料的查询可知,双元热释电红外传感器都是用于传统水平放置的探测环境下,同时查阅文献也未曾发现有竖直放置使用的情况。因此对双元热释电红外传感器竖直放置波形规律的探索是非常有意义的。PIR传感器水平放置使用时的探测规律是:由于PIR与光学透镜配合使用的情况,PIR感知范围是有一定夹角的感知面,目标水平运动轨迹相对于传感器水平轴线的竖直距离越短,传感器探测到的波形幅值越大,当热源的运动轨迹与传感器轴线水平对齐时波形幅值达到最大;相反,目标运动轨迹和传感器水平轴线之间的竖直距离越远,波形幅值越小;不论目标运动轨迹位于PIR水平轴线竖直方向的上端还是下端,感知波形的方向性(波形先正后负或者先负后正,即类正弦波和类反向正弦波,下文所说波形的方向性如同此解释)都不变;对于双元热释电传感器来说,由于两敏感元接入电路的方向正好相反,其感应到红外信号后产生的电压正好一正一负,所以当PIR水平使用时,目标不同的水平运动方向,会产生两种不同的波形形状——类正弦波和类反向正弦波,即对于目标运动方向的不同,传感器采集的电压信号具有方向性。因此可以通过观察波形方向来判断目标的运动方向。前期因为有水平放置PIR探测实验的经验,所以一直推测竖放会和水平放置产生的探测规律一样。但经过详细、完整实验证明,双元热释电红外传感器竖直放置时对目标感知波形变化规律与其水平放置使用时的探测规律不同,这对深入了解PIR的各项性质有很大帮助,并且拓宽了PIR的应用环境和领域。
1 PIR内部结构和工作原理
1.1 PIR内部结构
如图1是一个双元热释电红外传感器内部结构示意图,对外共接3个接线端,使用时D端接电源正极,G端接电源负极,S端接信号输出。该传感器内部串联着两个极性相反、特性一致的探测元,其目的是为了消除因环境和自身变化产生的干扰。
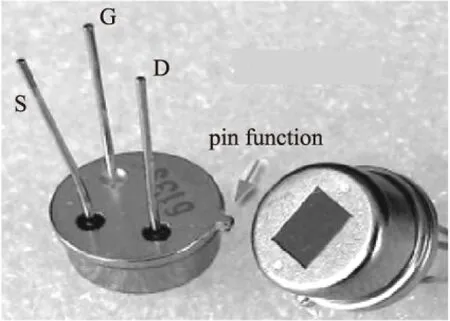
图1 双元热释电红外传感器的实物图
1.2 PIR工作原理
当外部红外信号辐射至传感器,通过光学透镜将其聚焦后作用于两个敏感单元,从而产生电信号。其中场效应管起到阻抗变换的作用。壳体上的滤光片主要实现阻止其他波段红外辐射通过,并使探测的红外波段辐射顺利通过。
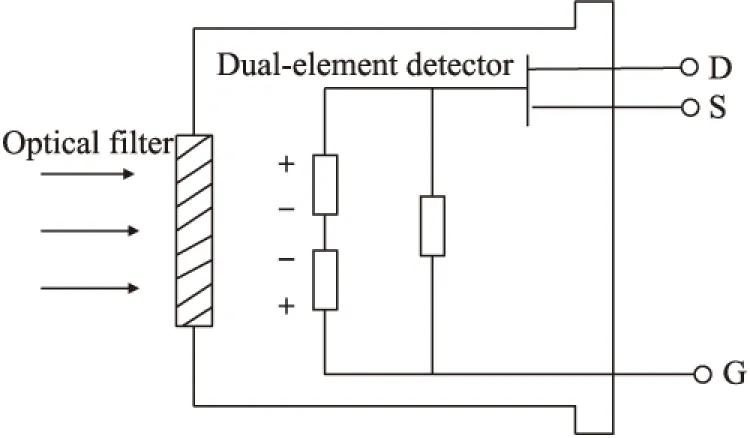
图2 双元热释电红外传感器的电路图
2 实验验证
2.1 实验的硬件搭建
运动目标模拟端(即标准热源搭建如图3):包括70W灯泡(与人体辐射出的红外波相当)、导轨(机械手)、导轨控制器、导轨控制端(笔记本电脑)。
通过对控制端(笔记本电脑)输入特定参数,将标准热源速度设置为1.1 m/s(人的正常步速),并可通过控制端控制其运动或停止。由于热源和导轨都是不变的,因此可以近似看成目标及其速度一定,这样可以在实验中更好的利用控制变量法,进行实验数据处理及实验结果分析。
信号波形采集端(如图4):包括带有光学透镜的双元热释电红外传感器、信号处理电路(滤波、放大功能)、数据采集卡、数字电源、数据显示及存储端(笔记本电脑)。
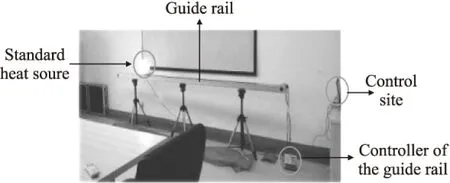
图3 运动目标模拟端
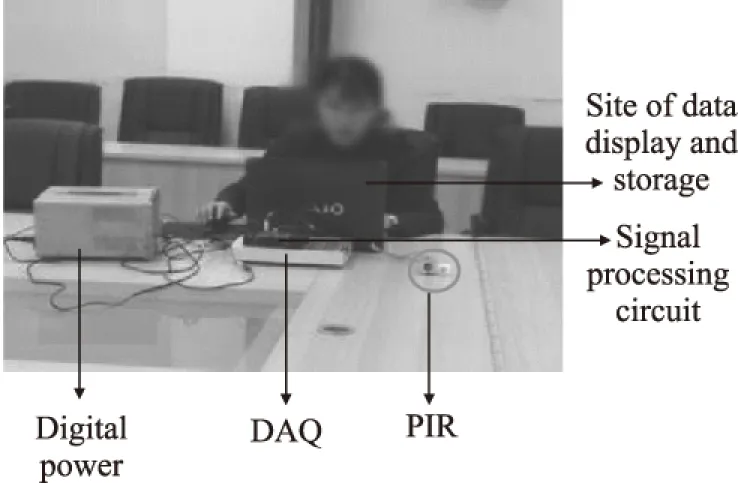
图4 信号波形采集端
通过数字电源给信号处理电路板供电,并将信号处理电路板的输出端连接到数据采集卡,然后将数据采集卡的输出线与数据显示及存储端(笔记本电脑)进行连接。数据采集过程是:通过PIR进行红外信号采集并产生相应电信号,然后通过电路板对采集到的信号进行放大和滤波,最后通过数据采集卡采集数字信号,并将数据波形显示到电脑屏幕。
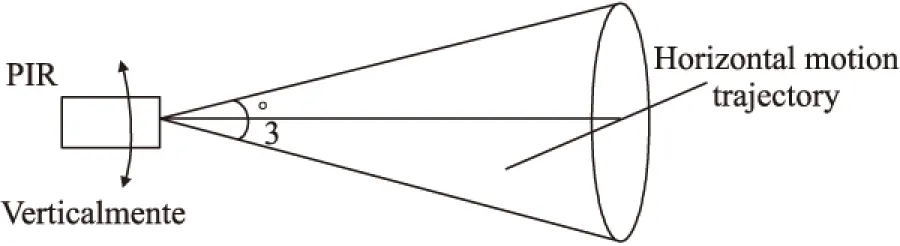
图5 实验装置整体示意图
2.2 具体实验步骤
实验1 将双元热释电红外传感器竖直放置,在距其8 m处放置运动目标模拟装置,其中导轨即标准热源的运动轨迹要与PIR感知光轴垂直放置,并将标准热源调整到与传感器相同高度,然后通过导轨控制端启动导轨控制器,使标准热源以1.1 m/s的速度匀速运动。并以每0.3°为标准,逐渐改变传感器感知光轴与水平面夹角(如图5所示),使夹角从-1.5°到1.5°依次变化,同时使标准热源沿轨道走一个来回(即正向及反向各走一次),然后分别观察信号采集端的波形变化,并记录实验数据。
实验2 将竖放的PIR沿中心线旋转180°,即将传感器上下对调,其他实验步骤与实验1完全一致。
2.3 实验数据及分析
2.3.1 实验数据
实验数据如表1、表2所示。
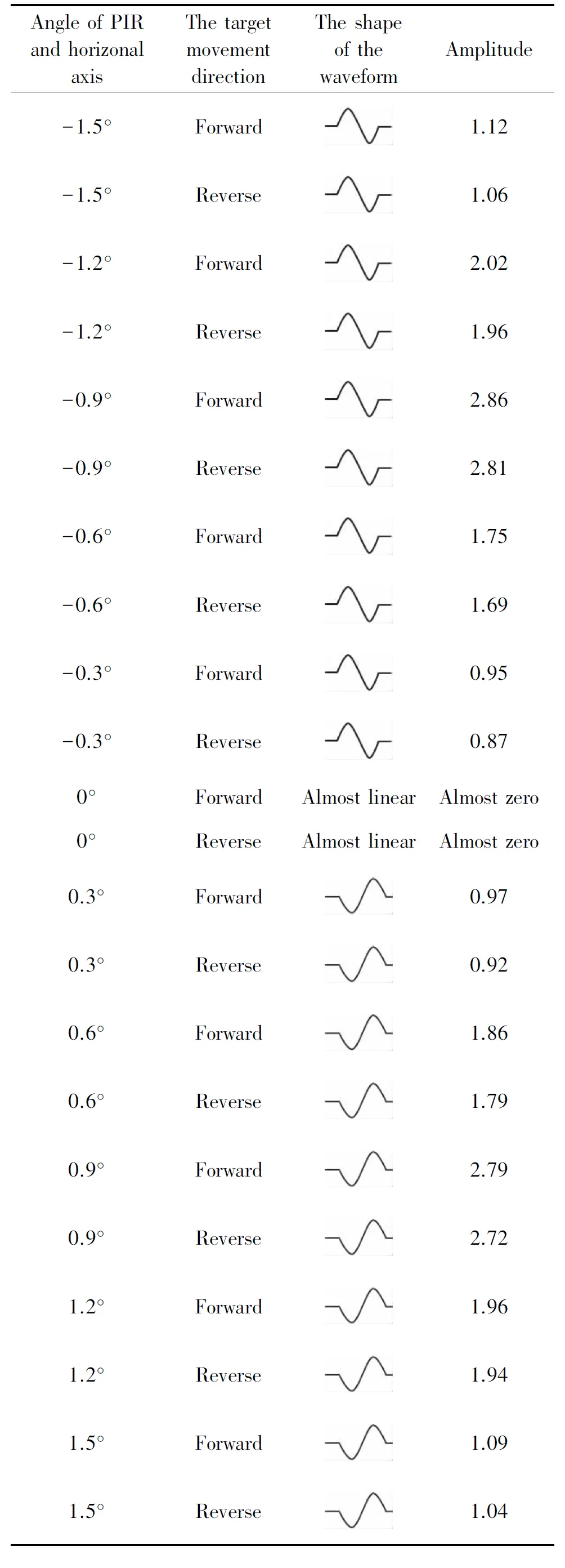
表1 实验1的实验数据
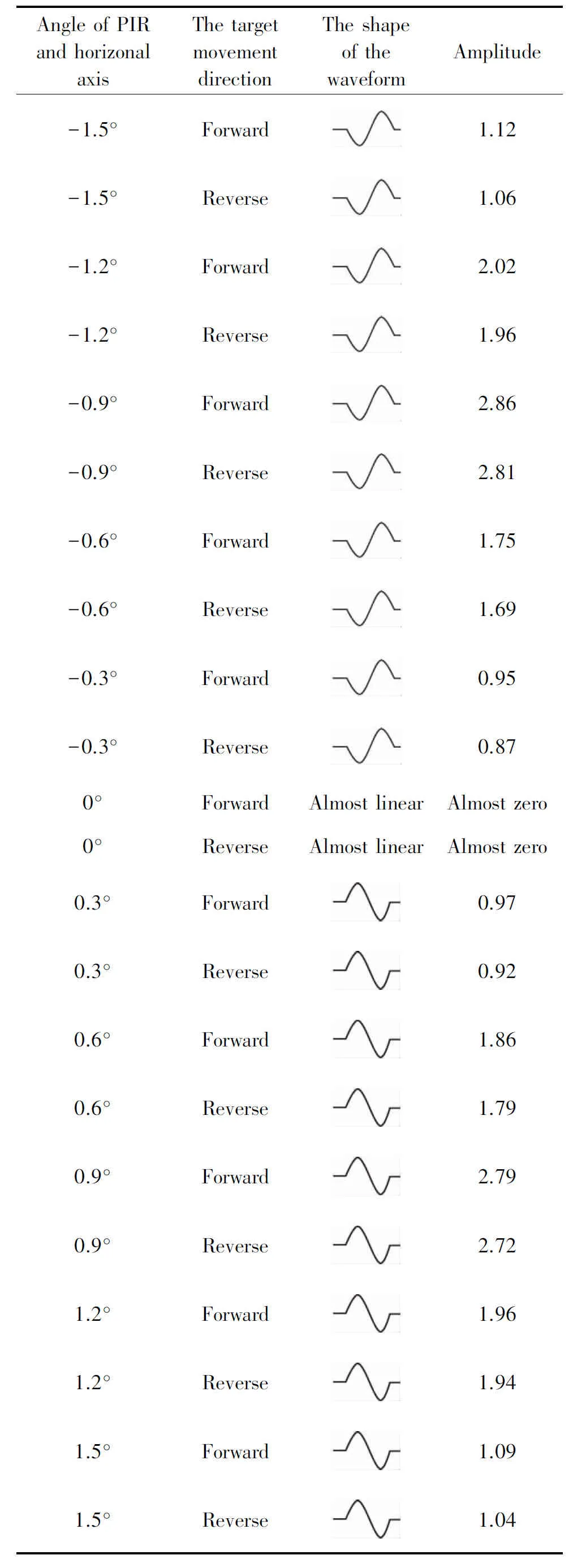
表2 实验2实验数据
2.3.2 数据分析
实验1 夹角从-1.5°变化到-0.9°过程中感知波形幅值逐渐增大,到-0.9°时幅值最大,最大幅值为2.85 V左右,并且不管目标运动方向是正向还是反向,波形形状一直是类正弦波;夹角在-0.9°到0°的变化过程中感知波形幅值逐渐减小,到0°时波形幅值最小,几乎为零,并且不管目标运动方向是正向还是反向,波形形状一直是类正弦波;夹角从0°变化到0.9°过程中感知波形幅值逐渐增大,到9°时幅值最大,最大幅值为2.8 V左右,并且不管目标运动方向是正向还是反向,波形形状一直是类反向正弦波;夹角从0.9°变化到1.5°过程中感知波形幅值逐渐减小,到1.5°时波形幅值最小,最小幅值为1 V左右,并且不管目标运动方向是正向还是反向,波形形状一直是类反向正弦波。
实验2 夹角从-1.5°变化到-0.9°过程中感知波形幅值逐渐增大,到-0.9°时幅值最大,最大幅值为2.85 V左右,并且不管目标运动方向是正向还是反向,波形形状一直是类反向正弦波;夹角在-0.9°到0°的变化过程中感知波形幅值逐渐减小,到0°时波形幅值最小,几乎为零,并且不管目标运动方向是正向还是反向,波形形状一直是类反向正弦波;夹角从0°变化到0.9°过程中感知波形幅值逐渐增大,到9°时幅值最大,最大幅值为2.8 V左右,并且不管目标运动方向是正向还是反向,波形形状一直是类正弦波;夹角从0.9°变化到1.5°过程中感知波形幅值逐渐减小,到1.5°时波形幅值最小,最小幅值为1 V左右,并且不管目标运动方向是正向还是反向,波形形状一直是类正弦波。
2.4 实验结果及结论
经实验验证可知:双元热释电红外传感器竖直放置使用与水平放置使用时采集到的波形变化相比,相同点是:产生的波形形状相同,依然是类正弦波或类反向正弦波;同时随着标准热源运动轨迹的不同,采集到信号波形的幅值也同样会产生变化。不同点是:波形幅值的变化规律不同,竖放时,随着角度从-1.5°到1.5°的变化过程中,采集到波形幅值的变化情况是:先变大,后变小,再变大,最后再变小,在这个变化过程中,幅值最大的两个位置对应角度分别是-0.9°和0.9°,最大幅值都为2.8 V左右;幅值最小的位置对应角度是0°,最小幅值近似为0 V;同时波形的方向性也不同,水平放置时,其方向性体现在目标运动方向上,即目标运动方向的正向和反向不同,波形会呈现出不同的波形形状,即类正弦波和类反向正弦波;而竖直放置时,波形形状的不同不会由运动方向的正负而体现,而是由运动轨迹经过传感器的正、负敏感区而体现。
3 应用
关于双元热释电红外传感器竖直放置使用探测规律的相关研究非常少,因此此次实验发现的波形感知规律对拓宽PIR的应用领域奠定了非常重要的基础,并对拓宽其应用范围也起到非常重要的作用。
3.1 爬坡/下坡环境中的应用
当PIR安装在移动平台上时,移动平台在处于爬坡/下坡地形中,对水平目标的观测就需利用PIR竖直放置时的探测规律。
利用PIR竖直放置时感知原理中波形具有方向性及幅值变化原理,我们能很好的推测出目标与PIR感知光轴的相对偏差。
3.2 检测传感器左右安装轴的水平性
首先将双元热释电红外传感器竖直放置,将标准热源高度调整到与PIR的理论轴线相水平,然后通过调整PIR传感器与水平面夹角,找到两个最大幅值位置中间并其幅值趋于0的位置(即幅值最小的位置),观察传感器与水平面夹角,因此可得出传感器左右安装轴的水平偏差。
4 结论
经试验证明,双元热释电红外传感器竖直放置与水平放置使用时感知波形的规律不同,当竖直放置时,随着传感器与水平轴线夹角的变化,感知波形幅值的变化过程分为4个阶段,先增大,再减小,然后增大,最后再减小。同时波形的方向性,不再像水平放置时与目标运动方向有关,而是与目标运动在哪个探测敏感区相关。通过此次实验,首次验证双元热释电红外传感器竖直放置使用时的感知探测规律,并且该发现也可应用在爬坡/下坡以及验证传感器左右感知光轴的水平性等特殊环境下,具有很大的应用价值,也为继续深入研究双元热释电红外传感器的工作原理和各项性质做了很好的铺垫。
[1] 孙乔,杨卫,于海洋,等. 动态下红外热释电传感器的目标定位方法[J]. 红外与激光工程,2012,41(9):2288-2292.
[2] 胡宁,吴华,王星,等. 双机交叉定位误差及配置距离最优化协调分析[J]. 火力与指挥控制,2013,38(1):40-44.
[3] 侯爽,杨卫,刘前进. 一种动静PIR相结合的目标定位方法[J]. 光电子激光,2015,26(2):315-319.
[4] Jianwei H,Changming W. An Improved Direction-Finding Cross-Location Method[J]. Aerospace Electronic Warfare,2008,4:017.
[5] 李博雅,李方敏,刘新华,等. 基于PIR Sensor的单目标跟踪系统设计与实现[J]. 传感器技术学报,2014,27(9):1214-1220.
[6] 易金桥,黄勇,廖红华,等. 热释电红外传感器及其在人员技术系统中的应用[J]. 红外与激光工程,2015,44(4):1186-1192.
[7] 杨卫,赵迪,刘前进,等. 针对运动目标感知的动静态双坐标探测系统[J]. 红外与激光工程,2014,(1):279-283.
[8] 吴鹏. 基于无线热释电传感器网络的人体目标跟踪系统的研究[D]. 武汉:武汉理工大学,2012.
[9] 张晔,杨卫,岳元,等. 基于热释电红外传感器探测距离影响因素的研究[J]. 红外与毫米波学报,2010,29(6):448-451.
Exploration on PIR Perceptual Rules and Applications Used Upright
ZHAOJunjiang1,2,ZHANGHuixin1,2*,LUYun1,2
(1.North University of China National Key Laboratory for Electronic Measurement Technology,Taiyuan 030051,China;2.North University of China Key Laboratory of Instrumentation Science and Dynamic Measurement,Taiyuan 030051,China)
On the experiment of exploring the detecting basic law on PIR sensor,we find,when PIR is upright,we believe that induction waveform changes is consistent with the laws of perception placed the level of the target,but the fact that our initial guess is different.Therefore,for the case of its upright position by changing the different target trajectories,we do a comprehensive and specific experiments.Finally,experimental results confirm our findings at that time.This discovery will not only allow us to have a deeper awareness and understanding of the PIR nature,but also broaden the application field of PIR. This will have a very high value for PIR universal application.
fundamentals of sensors;upright perception;the experiment rule extraction;the dual pyroelectric infrared sensor;perceptual rule application

2016-03-09 修改日期:2016-04-18
C:7230
10.3969/j.issn.1005-9490.2017.02.046
TN219
A
1005-9490(2017)02-0495-05
