RFID定位方法及其在智能制造中的应用
2017-04-21郭桓宇侯悦民
郭桓宇,侯悦民,李 康
(北京信息科技大学 机电工程学院,北京 100192)
RFID定位方法及其在智能制造中的应用
郭桓宇,侯悦民,李 康
(北京信息科技大学 机电工程学院,北京 100192)
无线射频技术是智能制造重要支撑技术之一,对信息物理系统的信息和数据交换起到了不可或缺的作用。但是RFID技术在制造业的应用还处于对生产装备、生产刀具等实时跟踪、定位,对生产数据进行采集、处理、分析的阶段。 RFID系统定位方法的选取将直接影响企业信息交互、制造过程管理等。针对这种情况,文中对现有的RFID定位方法进行了总结归纳,并讨论了RFID技术在国内制造业中可能的应用方向。
RFID技术;定位算法;智能制造
RFID作为一种非接触式的自动识别技术,凭借其识别距离远、速度快、抗干扰能力强与标签的防水、防磁、耐高温、寿命长、读取远等特点,已被广泛应用于物流、体育、交通、军事等多个行业[1]。随着“中国制造2025”的提出,业界开始将RFID技术和智能制造有效结合,能够在一定程度上弥补企业计划层与控制层之间的“信息断层”,能有效地进行智能化、可视化管理,大幅提升制造效率和质量。但国内在此方面的应用还处于初级阶段。为了能够高效运用RFID系统,本文对现有RFID定位方法进行系统地梳理总结,并介绍RFID技术在我国制造业的应用现状与可能发展方向。
1 RFID系统
RFID是一种无线通信技术,通过射频信号来识别特定目标并读取相关信息,实现一种无接触式的自动识别技术。RFID系统由阅读器、天线、应答器(电子标签)、应用软件系统4部分组成。当电子标签进入天线磁场范围后,标签接收天线发出的射频信号,并根据接收到的射频信号发送出与之相匹配的标签信息,阅读器读取标签信息并解码后,通过应用软件系统进行数据处理,从而实现对标签的自动识别[2]。
2 RFID定位方法
2.1 RSSI方法
RSSI定位原理[3]如下:设发射端与接收端的距离为Di,第i个阅读器接收到的功率为Pri,则
(1)
式中,Pt表示标签的发射功率;λ表示电磁波的波长;Gt和Gri分别表示标签及第i个阅读器天线的增益。
基于场强定位方法的系统易搭建,但室内环境存在多径效应及NLOS干扰,定位精度不高。
2.2 TOA方法
TOA定位原理[4]如下:设电磁波的传播速度为光速C,测量信号从发出到阅读器接收的时间为t,则标签到阅读器的距离S=Ct。
TOA方法的定位精度较高,但要求发射和接收在时间上要保持同步。但室内环境阻挡物较多,在传播过程中易产生散射波导致多径效应,甚至读不到标签信息。故阅读器接收到的时间间隔非常小,现有设备的分辨率不易区分。
2.3 TDOA方法
TDOA定位原理如下:通过测量多个天线与待测标签的到达时间差来确定待定位点的相对位置,根据数学关系,待定位点在以任意两参考点为焦点的双曲线上,因此多条双曲线的交点即为待定位点的实际位置[5],如图1所示。
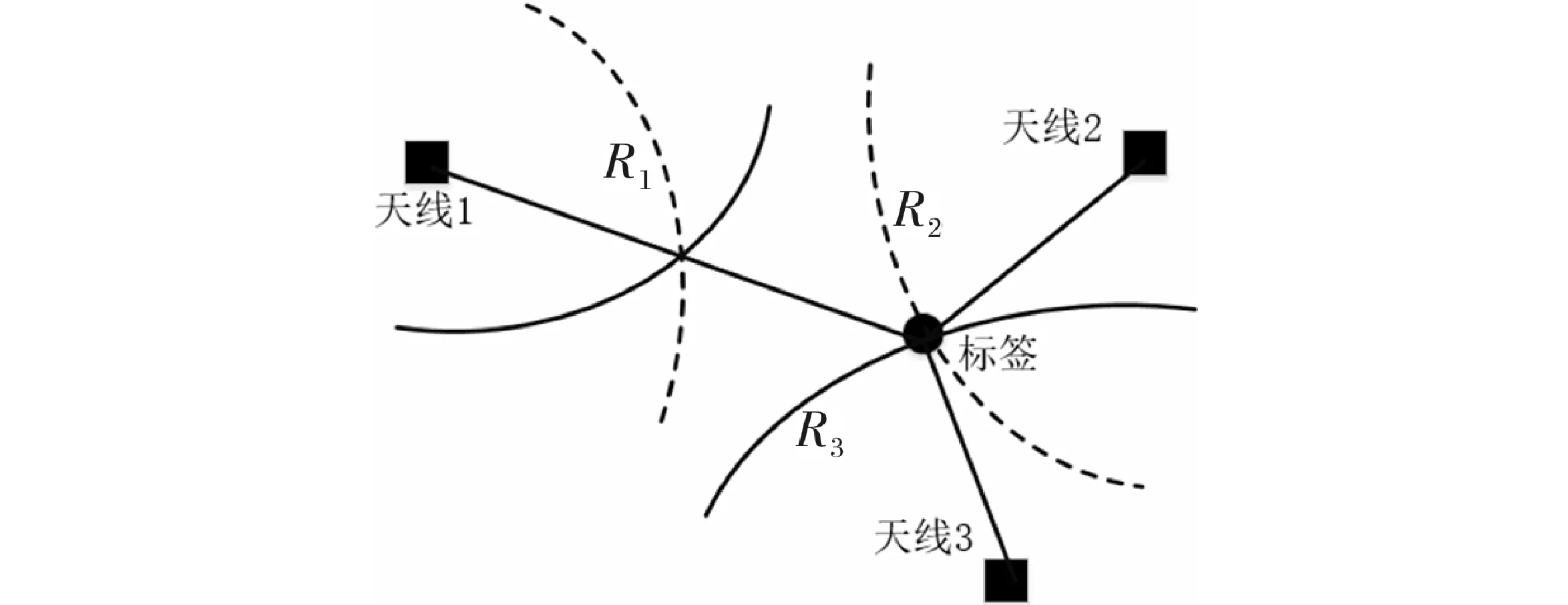
图1 TDOA定位方法示意图
TDOA定位方法的定位精度较高,节点在时间上不需要完全同步,而且能缓解硬件延迟问题。但是阅读器必须保持同步,多径效应、噪声、NLOS等对定位效果有一定影响。
2.4 AOA方法
AOA定位原理[6]如下:两个或以上的阅读器通过天线读取标签的RFID信号,根据传输路径的到达方向进行定位。通常标签处于天线阵元的远场区域,因此将标签的来波看作平面波,则间隔位置为d的相邻阵元所接收到的来自同一标签的到达角为θ的相位差φ
φ=2π×d×cosθ/λ
(2)
式中,λ是电磁波波长。根据式(2)测量不同阵元接收信号的相差φ,可得到来波信号的到达角θ。再根据两个阅读器接收到同一个标签的到达角信息计算标签的具体位置,算法原理如图2所示。

图2 AOA定位方法示意图
AOA方法定位精度较高,与TOA、TDOA方法相比,结构更简单,但对天线的灵敏度和分辨率要求更高,设备成本也较高。同时还需投入大量的计算和通信开销。但在NLOS环境下,AOA方法的定位误差明显增大,因此AOA方法不适用于低成本的室内定位系统。
3 RFID定位算法
目前基于RFID系统的定位算法主要有场景分析法、距离估计法、近似估计法三类。场景分析法通过预先建立基于RSSI值的先验分布图,再根据概率模型、KNN模型等做具体的分析。距离估计法是通过测量RSSI、TOA等参数值,再借助数学模型对位置信息进行估计。近似估计法是预先用阅读器和天线对定位环境布局,再通过读标签的方式对位置进行估计[7]。
3.1 Monte Carlo定位算法
Monte Carlo采用测量模型来估计标签位置的后验概率分布,采用隐马尔科夫模型计算每时每刻的概率。该定位算法包括预测阶段和更新阶段,递归调用这两个阶段便可实现定位[8]。
(1) 预测模型。假定室内噪声为高斯噪声,则通过第k-1时刻来预测第k时刻时标签可能会出现的位置。其预测模型如下
(3)
(4)
x(k)=x(k-1)+V(k)cos(θ(k))dk
(5)
y(k)=y(k-1)V(k)sin(θ(k))dk
(6)
式中,N(0,σ2)为高斯分布;x(k)、y(k)为横纵坐标;θ(k)、σθ为标签运动角度和方差;V(k)、σV为标签运动速度和方差;dk指时间步长;
(2) 测量模型。读写器通过TOA方法测得第k时刻待测标签和采样点分别与阅读器的距离,再通过测量模型计算标签的位置。公式如下
(7)
式中,Dk代表采样点Sk与读写器在k时刻的距离;Zk是标签到阅读器的测量距离;δ为标准差。
3.2 Landmarc算法(K最邻近法)
Landmarc算法通过比较待测标签与参考标签的列阵特征向量来估计待测标签位置。具体如下:在定位空间设置大量参考标签,其位置信息都已知。标签对应的RSSI值构成标签的特征向量。待测标签与参考标签特征向量最接近的参考标签位置即为待测标签的估计位置[9]。在实际中,待测标签的位置由向量差最小的k个参考标签共同决定。公式如下
(8)
式中,k代表向量差最小的参考标签的个数,(xi-yi)代表第i个参考标签的坐标;Wi指每个参考标签的权值因子
(9)
式中,Ej代表待测标签与参考标签j的欧氏距离。
文献[10]将等势点的概念引入Landmarc算法,并提出修改权重求解公式的方法来提高定位精度。文献[11]对传统的Landmarc算法中K值随环境能够自适应改变。结果表明改进后的自适应K邻近算法70%的标签精度在1 m之内,93%的标签精度在1.5 m之内,较传统的Landmarc算法,误差降低10%。
3.3 质心定位方法
质心定位算法是将所有信标节点的几何质心作为待定位节点的估计位置。加权质心算法是对信标节点质心坐标进行加权[12]。假设待定位节点在其通信范围内有3个信标节点,则通过加权质心算法求得的待定位节点坐标为
(10)
(11)
d1、d2、d3是待定位节点与信标节点的距离。该定位系统要保证系统的稳定性,读写器不发生相互干扰。文献[13]将Landmarc算法和质心算法结合起来以实现三维空间定位,实验表明误差在0.41 m内。
3.4 DV-Hop定位算法
DV-Hop定位算法首先通过距离矢量交换协议将锚节点的位置信息和跳数信息广播到网络中,使网络中所有节点获取到与锚节点的跳数。锚节点然后根据接收到的跳数信息计算网络平均每跳距离,并将其作为跳距校正值广播到整个网络,未知节点通过该校正值和平均每跳距离值估计与锚节点的欧式距离。最后通过三边测量法或最大似然估计法来实现定位[14]。
文献[15]提出一种改进的DV-hop定位算法,将锚节点按等腰三角形进行部署,减小了计算量,降低通信开销及成本。实验结果表明在单独计算节点的横纵坐标的情况下定位精度提升3.17%,平均定位误差为0.33 m。
3.5 APIT定位算法
APIT算法的基本思想是:从信标节点中任选3个,判断待定位节点是否位于这3个锚节点组成的三角形内,如果在三角形内,则将其标记,并依次检测锚节点的组合,最终将该未知节点包含在内的所有三角形相交区域的质心作为待定位节点的估计位置[16]。
APIT定位算法采用PIT法来判断定位点的位置,PIT法的原理如下:如果待测点M能够沿某一方向同时远离或接近三角形的所有顶点,则待测点在三角形外,否则在三角形内。
APIT定位算法的优点是定位精度高,性能稳定,对信标节点分布要求低。但每个节点需要大量的信标节点进行测试,对信标节点密度要求较高。但在网络边缘区域,未知节点附近的信标节点较少,可能无法满足APIT定位条件,需依靠其他方法定位。
3.6 凸规划定位算法
凸规划定位算法是将节点间点到点的通信连接作为节点位置的几何约束,把整个网络模型化为一个凸集,节点问题将转化为凸约束优化问题。再通过全局优化的解决方案求节点位置。根据位置节点与锚节点的通信连接和节点射程计算未知节点可能存在的矩形区域,最后把矩形的质心作为未知节点的位置[17]。如图3所示。
凸规划定位算法通信开销小、计算量小、容易实现,对信标节点个数和分布要求较低。信标重叠范围决定其定位精度。
文献[18]提出一种RSSI-Convex算法,将RSSI值与凸规划相结合,缩小未知节点可能存在范围,从而减小定位误差。文献[19]提出一种Convex-CIS算法,通过确定矩形区域最大内接圆,来缩小未知节点可能存在范围。
3.7 人工神经网络定位算法
人工神经网络通过处理输入信号来确定输出。人工神经网络结构模型描述如下[20]:
设神经元j的输入向量Xj=(x1,x2…xn)T其中,xi(i=1,2,…,n)表示第i个神经元的输入。
输入神经元节点链接到神经元节点j的加权向量Wi=(w1j,w2j,…,wnj)T。其中,wij(i=1,2,…,n)表示神经元节点i与神经元节点j之间的链接强度。
神经元j的阈值为θj,用x0=1的固定偏置输入节点表示阈值节点,则它与神经元j之间的链接强度为w0j=θj,所以神经元j的输入加权和为
(12)
神经元j的输入状态为:yj=f(sj),神经元j的输出为
(13)
其中,函数f(·)为神经元输入与输出的关系,称为转移函数。
文献[21]采用BP神经网络建立了信号强度值与路径损耗系数的映射模型,有效地提高了路径损耗系数的准确度。文献[22]运用模糊神经网络建立了标签信号强度和到读写器的距离的映射模型,实验表明平均定位误差为0.184 m,较BP神经网络定位精度提高了0.076 m。
3.8 新型定位算法
文献[23]提出一种基于RSSI值的定位算法,算法的原理如下:当读写器监测到待测标签时,记录读写器坐标(x,y),读写器沿原方向继续移动,将该方向记为 正向,当接收信号消失时记录阅读器坐标(x0,y0),待定位标签位于两圆的交点位置,通过上下移动读写器的方式来确定是哪一点,示意图如图4所示。

图4 新型定位算法示意图
4 RFID技术与智能制造
在制造业中,上海大众公司将RFID系统集成到发动机生产线的零点定位系统,降低人工操作对生产控制的影响,提高了生产效率[24]。天津丰田汽车公司皇冠车的生产线也开始使用RFID读写器对产品进行管理。大连机床股份有限公司利用RFID系统对测试刀具进行生产验证,解决了因刀具使用混乱造成的资源浪费问题[25]。我国一些卫浴企业也运用RFID系统对产品进行数据采集、动态调配和监控生产过程。广州某大型现代企业对产品的生产,存储全程跟踪,实时获取产品数据、监控产品质量和产品的具体位置[26]。三一重工、上汽通用五菱、上海通用等国内龙头企业也开始实施RFID项目,运用RFID标签对制造过程进行管理等。
目前我国制造业对RFID的应用集中在制造系统数据采集、数据处理、数据分析。智能制造的发展方向是使制造系统实现实时状态感知和响应自助决策[27],通过建立物理信息融合系统(Cyber-Physical System, CPS)实现智能连接的工厂。信息技术向制造业全面嵌入,实现对生产要素高度灵活的配置。加快传统制造业转型升级的步伐,通过互联网智能设备将这些数据联系起来并进行分析、调整、决策并开展智能生产,生产高品质产品。
5 结束语
RFID技术是CPS支撑技术之一,可以实现不同资源的连接。通过RFID技术为企业提供决策依据,提高各个生产阶段的运行效率、制造业的集约化程度,对制造业的转型具有重要推动作用。
[1] 宋远峰,刘新.基于RFID的定位系统综述[J].数字通信,2013,40(4):9-13,33.
[2] 吴欢欢,周建平,许燕,等.RFID发展及其应用综述[J].计算机应用与软件,2013,30(12):203-206.
[3] 刘天祎.基于RFID的室内定位系统研究[J].智能计算机与应用,2016(2):20-22.
[4] 吴浩权,吴哲夫,袁荣亮,等.基于RFID的室内无线定位技术研究[J].电声技术,2013(3):76-78,92.
[5] 谢东原,唐荣年.基于RFID的区域无线定位技术综述[J].科技传播,2014(11):221-222.
[6] 孟强.应用RFID技术实现地铁列车精确定位的研究[J].科技信息,2010(33):71-72.
[7] 韩晶.基于RFID标签的定位原理和技术[J].电子科技,2011,24(7):64-67.
[8] 林敏,鲍煦,王刚.改进Monte Carlo算法用于RFID标签的室内定位[J].微计算机信息,2008(14):203-204,275.
[9] 曹世华.室内定位技术和系统的研究进展[J].计算机系统应用,2013(9):1-5.
[10] 顾嘉,钱钰博,孙厚芳,等.工装室内定位技术研究,北京理工大学学报,2010,9(30):1057-1059.
[11] 王瑞峰,马学霞,王彦快.RFID技术的定位改进算法在铁路隧道人员定位中的应用[J].铁道学报,2012(10):68-71.
[12] 杨新宇,孔庆茹,戴湘军.一种改进的加权质心定位算法[J].西安交通大学学报,2010(8):1-4.
[13] 马斌,解亚男,邱海斌,等.基于CPS的建筑内环境三维质心定位算法[J].沈阳建筑大学学报,2013(2):372-377.
[14] 李牧东,熊伟,郭龙.基于人工蜂群算法的DV-Hop定位改进[J].计算机科学,2013(1):33-36.
[15] 林惠强,周佩娇,刘才兴,等.改进DV-Hop定位算法在动物监测中的应用[J].农业工程学报,2009(9):192-196.
[16] 唐明虎,张长宏,昝风彪.无线传感器网络APIT定位算法[J].微型机与应用,2010(21):1-4.
[17] 秦小虎,辛云宏,夏海峰,等.无线传感器网络节点定位技术[J].计算机系统应用,2011(9):117-121.
[18] 马骏,王敬东,温家旺,等.RSSI与凸规划相结合的无线传感器网络定位算法[J].指挥控制与仿真,2013(4):56-61.
[19] 向满天,罗嗣力,戴美思.无线传感器网络中一种改进的凸规划定位算法[J].传感技术学报,2014(8):1138-1142.
[20] 马瑞.人工神经网络原理[M].北京:机械工业出版社,2010.
[21] 吴超,张磊,张琨.基于BP神经网络的RFID室内定位算法研究[J].计算机仿真,2015(7):323-326.
[22] 陈增强,国峰,张青.基于模糊神经网络建模的RFID室内定位算法[J].系统科学与数学,2014 (12):1438-1450.
[23] 金明辉,王治华,金学奇,等.RFID技术在配网数字化五防系统中的应用[J].电气应用,2016(3):16-19,82.
[24] 任培恩,陈酋,汤晓辉.上海大众缸盖机加工线零点定位系统的应用[J].柴油机设计与制造,2015,21(2):44-47.
[25] 周光辉,王杰,韩占磊,等.基于RFID的车间刀具自动识别技术与系统实现[J].四川兵工学报, 2011, 32(3):50-52.
[26] 张赠富.RFID在离散型制造业生产控制系统中的应用研究[J].物流技术,2008,18(5):81-83.
[27] 朱森第.我国智能制造与智能制造装备的发展[J].冶金管理,2015,31(9):9-17.
RFID Positioning Method and Its Application in Intelligent Manufacturing
GUO Huanyu,HOU Yuemin,LI Kang
(School of Electromechanical Engineering,Beijing Information Science and Technology University,Beijing 100192,China)
RFID technology is a key technology for information and data exchange in CPS systems to support intelligent manufacturing. Current applications in manufacturing industry include real-time tracking, positioning of production equipment and collection, processing, analysis of production data. The existing RFID positioning methods are reviewed and summarized, and the RFID technology in domestic manufacturing industry application direction is discussed.
RFID technology; location algorithm; intelligent manufacturing
2016- 05- 30
国家自然科学基金资助项目(51175284);北京市教委科研基金资助项目 (SQKM201211232002)
郭桓宇(1990-),男,硕士研究生。研究方向:RFID技术等。
10.16180/j.cnki.issn1007-7820.2017.04.029
TP29
A
1007-7820(2017)04-115-05
