遗传算法在恒张力控制系统中的应用
2017-04-21胡晓锐骆艳洁麦云飞
胡晓锐,骆艳洁,麦云飞
(上海理工大学 机械工程学院,上海 200093)
遗传算法在恒张力控制系统中的应用
胡晓锐,骆艳洁,麦云飞
(上海理工大学 机械工程学院,上海 200093)
文中以锂离子电池卷绕机的隔膜张力系统为研究对象,分析隔膜张力控制系统的力学模型,认为该系统是一个非线性的时变系统。针对卷绕速度的变化引起张力波动的问题,运用遗传算法对PID控制参数进行自动寻优,并在Matlab中对控制系统进行仿真。试验结果表明,控制系统的响应速度提高50%,且未出现超调。
张力系统;PID控制;遗传算法;Matlab
21世纪,能源危机问题使世界各国都在积极探索各种新能源,如太阳能、风能、核能的清洁能源等以应对能源危机。由于锂离子电池的能量密度大、工作电压高、循环寿命长、自放电低等优点,因此其被公认是目前世界上最先进的商品化二次电池[1-2]。随着锂离子电池技术的日臻成熟,各个行业对锂离子电池的需求量呈现迅速增长态势,因此对锂电池生产设备的性能和生产效率提出了更高的要求。
1 隔膜张力控制系统
锂离子电池卷绕机的隔膜放卷的简化图,如图1所示。
开始卷绕时,由人工引导两层高分子隔膜至卷针处,手动单步调试设备,卷针出针夹紧薄膜卷绕,完成隔膜送入。随后进入自动卷绕模式,低摩擦气缸推动张力机构提供预紧张力,使隔膜始终保持紧绷,卷针低速卷绕一段时间后,正负极片先后完成自动送片,卷绕头正常高速卷绕。恒张力控制系统的工作原理,如图2所示。

图1 隔膜张力放卷示意图
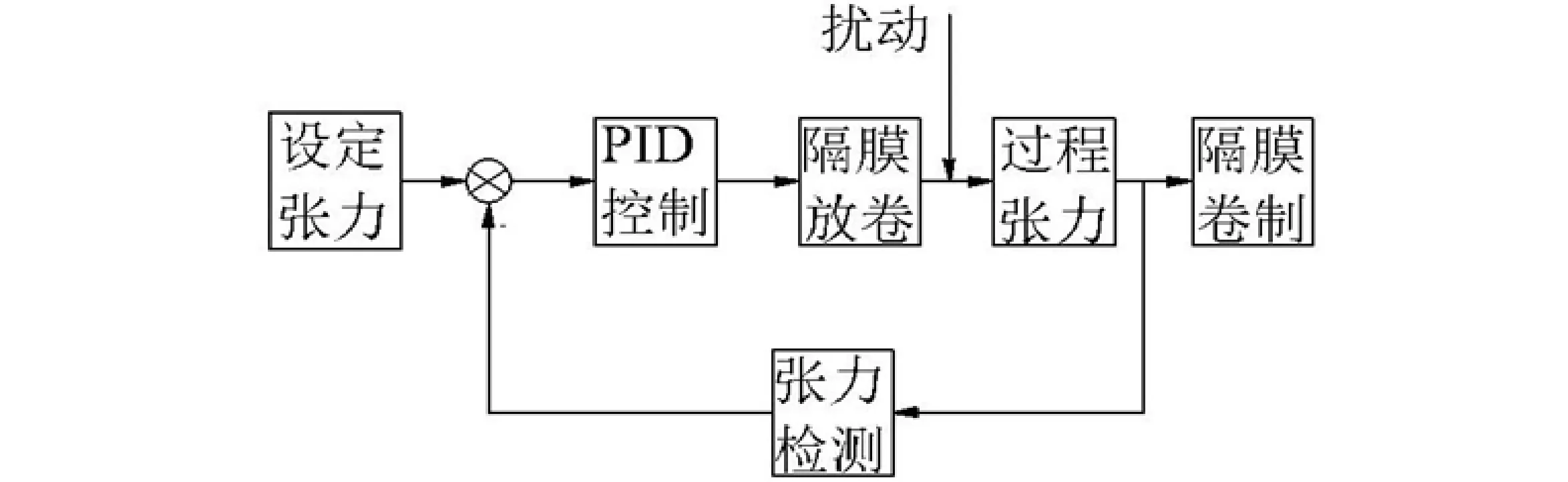
图2 恒张力控制系统原理图
通过触摸屏设定恒张力的大小,卷绕过程中,隔膜时紧时松产生张力波动,使得隔膜张力臂发生偏转,张力臂上的旋转编码器将张力值,通过负反馈送入比较器与恒张力的设定值进行比较,由PID控制器进行纠偏,控制放卷伺服电机来控制隔膜放卷速度的快慢,使隔膜放卷的速度紧跟随隔膜收卷速度的变化,实现隔膜张力恒定的控制。
2 隔膜放卷力学模型的分析
隔膜放卷机构的力学模型,如图3所示。

图3 隔膜放卷机构的力学模型
由动力学的理论可知,料卷力矩平衡方程
(1)
式中,Me是电机转矩;Mf是阻力转矩。
(1)式中的转动惯量

(2)
因为线速度v=ωR,对时间微分则有
(3)
(4)
式(4)进行整理可得到张力方程
(5)
隔膜张力方程(5)中,单个电芯卷绕时R相对变化较小;并由于r0、Me、Mf都是常数,故张力F正比于dv/dt。由此可看出,张力F的大小依赖线速度v的变化大小,是随时间变化的量,而R也是随时间的变化量,因此隔膜张力控制系统是一个非线性、时变系统。
3 传统PID控制及仿真
常规PID控制器是一种线性控制器,其依据设定值和过程值之间的偏差,对偏差进行比例、积分、微分运算,即
PID控制器控制结构简单、稳定性好、鲁棒性强等优点,可改善系统的动态和稳态特性,广泛应用于张力控制系统用来保证张力的恒定[3-5]。由于被控系统是一个二阶时变系统,选取其等效传递函数为
(6)
利用工程整定法确定参数,运用Matlab中的Simulink模块对恒张力控制系统进行仿真,输入是单位阶跃信号,传统PID控制下的响应曲线如图4所示。
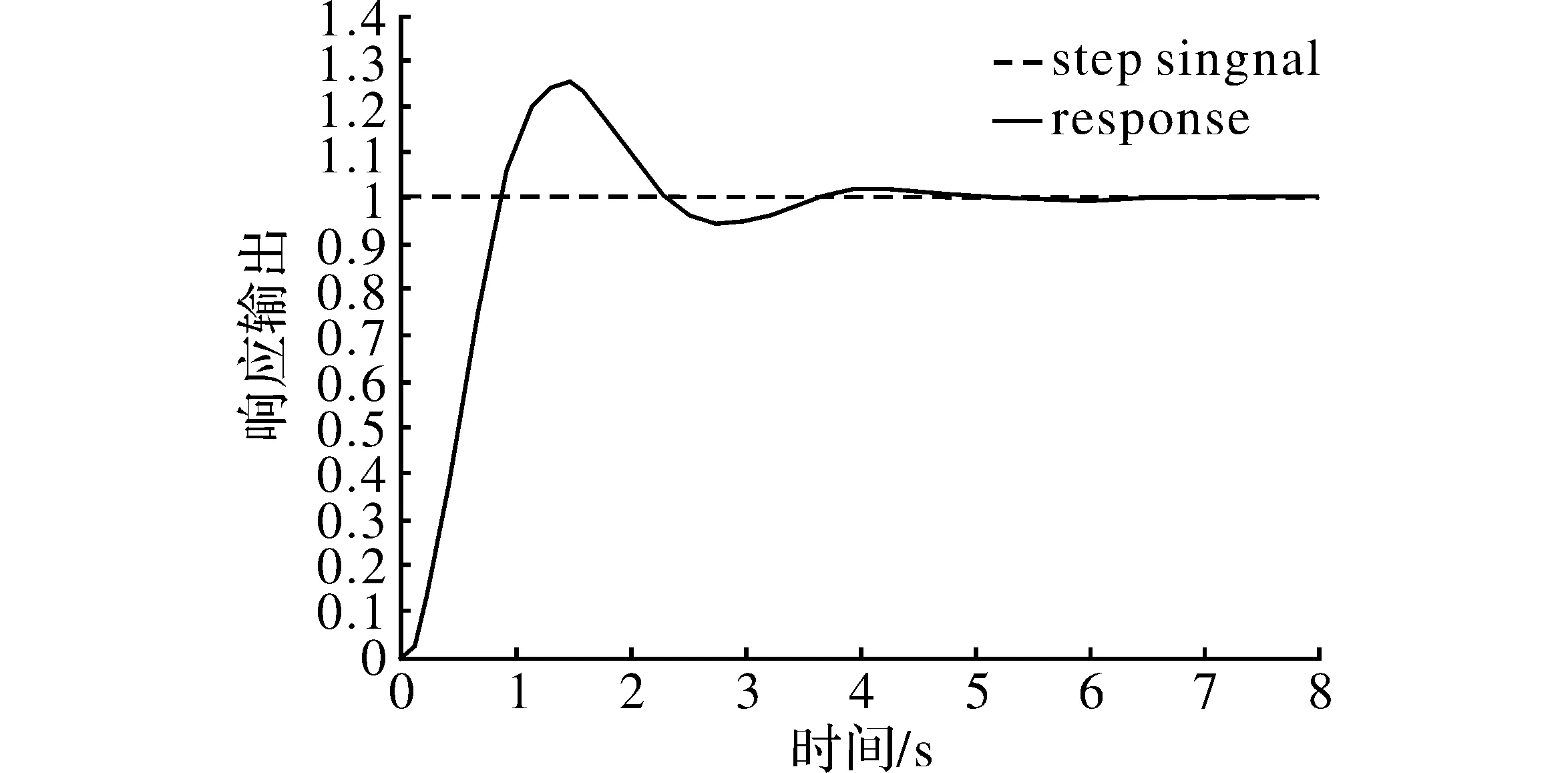
图4 单位阶跃响应曲线
分析阶跃响应曲线可知,上升时间tr约为1 s;最大超调约σ约为25%;调整时间ts约为5 s。
查阅相关资料[6-8],对于隔膜张力控制系统而言,不允许出现超调量。由前文的隔膜放卷力学模型分析可知,张力控制系统是一个典型的非线性、时变控制系统,针对随机的张力波动干扰问题,要求控制系统无超调量,而且响应速度要快。显然传统的PID控制已经不能满足要求,下文就利用遗传算法来实现参数的自动寻优。
4 PID控制及Matlab仿真试验
4.1 遗传算法的基本原理
遗传算法(Genetic Algorithm,GA)的理论基础是生物中的进化论和遗传学说,是近年来发展迅速的一种全新的随机搜索与优化算法[9-10]。基本遗传算法的流程如图5所示。

图5 遗传算法的基本流程
开始随机产生数目一定初始种群,计算个体的适应度值,并且判断适度值是否符合优化准则,若符合优化准则则输出最优解和最佳个体;若不符合,则选取适应度高的个体作为交叉变异的新种群;依据交叉原则和变异原则产生新的个体;新产生的个体进行适配值的计算,重复流程,直至符合终止条件结束整个流程。
4.2 遗传算法的的PID参数整定步骤
遗传算法的PID参数寻优流程如下:
(1)确定PID的3个参数的基本寻优区间,例如KP∈(1,10)(1,10)等;
(2)PID参数的编码。传统编码方式采用二进制编码,但其还存在解码的问题,且在计算精度和计算速度上难以兼顾;实数编码避免数制的转换,并可兼顾计算精度和计算速度[11-13]。本文采用的是实数编码方式使得参数空间和参数编码空间对应;
(3)选择目标函数。为了获得较好的系统动态过渡特性,采用绝对误差时间积分性能指标作为参数选择的最小目标函数,即选择IAE准则。为了防止控制能量过大,目标函数中加入输入控制的平方项,考虑时间短的因素,选用下式作参数的最优指标[14-15]
(7)
式中,e(t)是系统误差;u(t)是系统的输出;tu是上升时间;w1、w2、w3是权系数。
为了避免超调,采用惩罚功能;即若产生超调,将超调量作为最优评价指标
ife(t)≤0:
式中,e(t)是系统误差;u(t)是系统的输出;tu是上升时间;w1、w2、w3、w4是系数。
(4)选择适配值函数。为了体现自种群的适配值函数f和最优评价指标之间的关系,据相关资料[16-17]通常选取最优评价指标的倒数作为适配值函数,即f=1/J;
(5)确定遗传算法的参数。设定交叉率Pc=0.9,变异率Pm=0.001,KP的范围是[0,20],Ki、Kd的范围均为[0 ,1],w1=0.999,w2=0.001,w3=2.0,w4=100,样本大小为30,进化代数为G=100代。
4.3 遗传算法的PID参数寻优及仿真
在Matlab中进行代码编程,系统传递函数为式(6),输入采用单位阶跃信号,对张力控制系统的PID参数进行寻优。其仿真结果显示最优指标J=10.54,PID参数为Kp=2.865,Ki=0.858,Kd=0.023。
最优指标曲线如图6、适配值函数曲线如图7所示。图6的最优指标函数曲线可看出,随着繁殖代数的递增,最优指标逐渐下降;图7的适配值函数曲线刚好相反,随着代数的递增,种群的适配值越来越高,意味着新种群的适应性越来越强。
系统偏差曲线和单位阶跃的时间响应曲线,如图8和图9所示。

图6 最优指标函数曲线
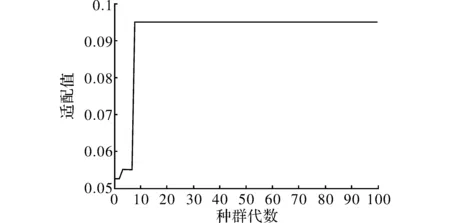
图7 适配值函数曲线

图8 系统偏差时间曲线

图9 单位阶跃的时间响应曲线
图8是遗传算法下的控制系统的偏差随时间的变化,可以看出控制系统的纠偏效果显著。图9的时间响应曲线可以看出,上升时间tr约为0.9 s、调整时间ts约为2.5 s,没有超调量。
对比传统PID控制下时间响应曲线可知,上升时间tr基本没变;调整时间由5 s提高到2.5 s,响应时间缩短50%;最为关键是遗传算法下的PID控制没有超调量。整个张力控制系统的控制指标大幅优化,达到响应快,无超调的目标,可克服张力波动问题。
5 结束语
通过对18650型的全自动锂离子圆柱型电池卷绕机的隔膜张力控制系统进行分析,将遗传算法应用于PID参数自整定。由Matlab仿真试验分析看,控制效果良好,系统响应加快、超调变小,能克服张力波动因素,可满足生产现场的要求。
[1] 贾恒义.锂离子电池材料的研究与应用[J].电源技术,2011(7):869-871.
[2] 计雄飞,陈云鹏,魏利伟,等.国内外动力用锂离子电池主要标准对比分析[J].标准科学,2014 (4):39-42.
[3] 张莹.基于模糊参数自整定PID的凹印机张力控制系统[J].渭南师范学院学报:综合版,2013,28(9):33-36.
[4] 戴忠达.自动控制理论基础[M].北京:清华大学出版社,1991.
[5] 张倩,杨耀权.基于遗传算法的PID控制器参数优化方法研究[J].电力科学与工程,2011,27(11):53-57.
[6] 游林儒,杨秀春.基于锂电池卷绕机张力控制系统[J].控制工程,2011,18(6):890-892.
[7] 关朴方.基于模糊PID的锂电池极片卷绕设备张力控制[J].福建工程学院学报,2013,11(4):377-380.
[8] 张晶,王立松,阳如坤.方形锂离子电池卷绕设备张力控制的改进[J].组合机床与自动化加工技术,2009(2):67-69.
[9] 易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,1999.
[10] 曹柱中,徐薇莉.自动控制理论与设计[M].上海:上海交通大学出版社,2007.
[11] 滕青芳,范多旺,曹靖.基于遗传算法的控制系统PID参数优化应用研究[J].兰州交通大学学报,2005,24(1):29-32.
[12] 刘青松.基于模糊-遗传算法的智能自适应PID控制系统参数优化[J].电气传动自动化,2006,28(2):8-12.
[13] 周明,孙树栋.遗传算法原理及应用[M].北京:国防工业出版社,1999.
[14] 刘金锟.先进PID控制及其Matlab仿真[M].3版.北京:电子工业出版社,2011.
[15] 梁春英,吕鹏,纪建伟,等.基于遗传算法的电液变量施肥控制系统PID参数优化[J].农业机械学报,2013,44(z1):89-93.
[16] 靳文军,刘伯鸿,徐志奇,等.优化GA的模糊自适应张力控制[J].自动化仪表,2013,34(7):82-85.
[17] 吉根林.遗传算法研究综述[J].计算机应用与软件,2004,21(2):69-73.
Application of Genetic Algorithm In Constant Tension Control System
HU Xiaorui,LUO Yanjie,MAI Yunfei
(School of Mechanical Engineering,University of Shanghai for Science and Technology, Shanghai 200093, China)
Diaphragm tension system of the lithium-ion battery winder as the research object, analyzed it’s mechanical model and concluded that the system is a nonlinear time variable system; according to the fluctuating tension of the system caused by the change of the winding speed,using genetic algorithm to automatically complete the optimization of PID control’s parameters , and using Matlab to simulate the control system’s response.Test results show that the response’s speed of the control system increased 50% and without overshoot.
tension system; PID control; genetic algorithm; Matlab
2016- 05- 07
胡晓锐(1990-),男,硕士研究生。研究方向:机械自动化及其控制。
10.16180/j.cnki.issn1007-7820.2017.04.018
TP301.6
A
1007-7820(2017)04-072-04
