基于无位置传感器的无刷直流电机换相续流研究
2017-04-21谢昊天秦海鸿聂新朱梓悦
谢昊天,秦海鸿,聂新,朱梓悦
(南京航空航天大学 自动化学院电气工程系,江苏 南京 211106)
基于无位置传感器的无刷直流电机换相续流研究
谢昊天,秦海鸿,聂新,朱梓悦
(南京航空航天大学 自动化学院电气工程系,江苏 南京 211106)
无刷直流电机(brushless DC motor,简称BLDCM)换相时刻关断相电流续流会引起电机端电压波形畸变。当采用无位置传感器反电动势过零检测法时,端电压波形畸变会使位置检测信号相位超前,偏离最佳换相时刻,电机负载转矩和转速较大时增加了转矩脉动,甚至会造成换相失败,限制了反电动势检测法的无刷直流电机功率应用范围。因此,针对电流续流引起的位置信号相位超前的机理加以分析,推导出了超前角度与负载转矩和转速的关系,并给出了位置检测信号相位超前的补偿算法,并对电机在不同负载转矩和转速下位置信号进行相位补偿,拓宽了无位置无刷直流电机的运行范围。仿真和实验结果表明,在不同负载转矩和转速下经过补偿后的位置信号与最佳换相信号一致,电机负载转矩和转速较大情况下运行平稳。
无刷直流电机; 无位置传感器; 反电势; 换相续流; 补偿
0 引 言
基于无位置传感器技术的无刷直流电机(brushless DC motor,BLDCM)适合于高温、高压、强腐蚀等恶劣的工作环境下工作,是目前研究的热点。反电动势法是应用最为广泛的无位置传感器技术,其基本原理是通过处理三相端电压得到反电势的过零点,然后判断过零点生成位置检测信号来控制电机运行[1-5]。
反电动势法由于低通滤波器相移、位置信号计算延时和电枢反应等因素造成位置信号检测误差,会导致电机相电流峰值变大和较大的转矩脉动,降低了电机的工作效率,产生较大的电磁噪声,甚至可能引起电机失步[6-9]。很多学者提出了解决基于反电势法的位置检测信号相移的方法。文献[10-11]通过检测非导通相续流电流偏差,校正位置信号相位,但该方法只适用于电机轻载运行的情况。文献[12]给出一种反电动势检测方式,消除了检测滤波电路带来的相位误差,但是这种方法没有给出换相续流过程对位置信号的影响。文献[13]为了降低二极管续流的影响而采用复杂的PWM调制技术,降低了控制系统的稳定性,增加了控制难度。文献[14]采用了一种新颖的反电势检测法,消除了滤波电路带来的相移,但是这种方法只适用于速度变化不大的场合。文献[15]提出一种新的过零点检测电路,在低速和高速时分别采用两个不同的参考电压检测反电动势过零点,在一定程度上减小了位置信号相位误差,但均需添加新的硬件电路,增加了系统复杂性和成本。文献[16]分析了相电流续流对位置信号的影响,给出补偿角与续流角度的关系式,但未分析续流角度、补偿角度与负载转矩和转速的关系。
本文采用信号分解的方法,给出端电压畸变的数学模型,并根据此模型推导出实际位置信号相位超前角度与负载转矩和转速之间的关系,并据此提出一种相位补偿方法,修正电机在不同负载转矩和转速下电流续流带来的影响,抑制相电流续流带来的转矩脉动,扩大了无位置无刷直流电机的运行范围。仿真和实验表明,电机在负载转矩和转速较大情况下仍可正常运行,验证了该补偿方法的有效性。
1 无位置信号相移分析
端电压经过低通滤波器后,高频分量将会被滤除,所以在分析时作如下简化:(1)由于低通滤波器的截止频率远远小于PWM的斩波频率,高频PWM斩波近似认为其电压的平均值;(2)每相反电势是120°平顶宽,等效幅值为母线电压PWM斩波。调制方式采用PWM_ON的无刷直流电机驱动的端电压波形可以等效成图1所示的模型。

图1 端电压及其分解波形

图2 一个换相周期T内 三相电流的变化
在图1中ue为理想的反电势波形;uI为相电流续流引起的电压钳位波形;uT为考虑相电流续流的电压波形,其等于ue和uI相加。由图1可见,正是由于uI的存在使得反电势电压出现畸变。图2给出了A相换相到B相一个换相周期T内三相电流的变化和反电势ea的示意图。
A相电流关断阶段的等效电路图如图3所示,该图表示了电机从A相功率管S1关断开始到A相电流降到零等效电路。

图3 换相时刻等效电路图
在A相关断,B/C相导通的换流过程中,三相绕组的反电势可以分别表示成:
eb=ec=E
(1)
(2)
根据等效电路图,可以得到电压平衡方程为:
(3)
转换成三相电流方程为:
(4)
式中τ=L/R。
初始条件为:
ia(0)=-ic(0)=Io,ib(0)=0
(5)
式中Io为负载转矩对应绕组平均电流。
求解微分方程可以得到A相电流的表达式为:
(6)
A相电流下降到零的时刻,有:
(7)
所以求得续流时间为:
(8)
折合成电角度为:
(9)
式中f为反电势频率。
假设转矩常数为α,相反电势常数为β,那么负载转矩TL可以表示为TL=αIo,反电势E可以表示为E=βn,n为电机转速,且f=pn/60,p为电机极对数。将以上等式代入式(9)可得:
(10)
图4给出了续流角度与负载转矩和转速的三维曲线图,从图中可以看出,随着电机负载转矩和转速的增加,续流角度也随之变大。

图4 续流角度与负载转矩和转速关系

图5 各个电压间的相位关系
为了得到续流角度与补偿角度的关系,我们将端电压分解成理想反电势波形和相电流续流引起的电压钳位波形,如图1中所示。各电压间的相位关系如图5所示,Δue为理想反电势基波分量,ΔuI为续流引起电压钳位波形基波分量,ΔuT为经过无位置检测电路波形基波分量,θ为相位超前角(即为要补偿的角度),f(δ)为电压钳位波形超前角度,α为Δue与ΔuI的相位角。
将UI近似等效成阶跃信号,经过低通滤波器后的输出电压交流振幅ΔuI为:
(11)
式中δ为电机续流角度,是续流时间t1折算后的电角度;k1为修正系数,取为1;f为反电动势的频率;D为占空比。
同理可以得到Ue经过低通滤波器后电压的交流振幅为:
(12)
根据图5可以得到θ的表达式为:
(13)
由于求解f(δ)计算复杂,近似认为图6中UI波形上下对称且为矩形,则:
(14)
因此:
(15)
在电机选型一定时,无位置信号的相位超前角度与电机负载转矩与转速有关。在负载转矩和转速较小时,相电流续流时间很短,uI时间很短,几乎对端电压不会产生影响,因此对位置检测信几乎没有影响。当电机负载转矩或转速较大时,相电流续流时间较大,对端电压的影响不可忽略,因而对位置检测信号产生影响很大,导致位置检测信号超前于正确的位置信号。并且随着负载转矩或转速的增大,位置检测信号超前正确位置检测信号角度越大,从而导致换相错误,引起相电流畸变,造成电磁噪声,增大了转矩脉动,甚至可能导致电机失步。
2 不同负载下相位补偿

图6 相位补偿曲线
图6给出了电机负载转矩和转速与相位补偿角度的对应关系。在电机负载转矩和转速增加时,无位置检测信号相对于最佳换相信号的相位超前角度也相应在增加。可以根据相位补偿曲线,在不同负载转矩和转速下得到无位置检测信号的相位超前角度后对位置信号进行相位补偿即可以解决换相续流引起的位置检测信号相角超前的问题。但是由于该相位补偿方法在程序中计算量很大,可能导致占用过多的处理器资源,在研究过程中采用查表的方法在线实时补偿。
表1给出了电机负载转矩和转速离散点的相位补偿角。当电机在线运行时只需检测电机负载转矩和转速,并查该表得到相位补偿角度,控制器确定位置检测信号超前的相位角度后进行补偿。通过补偿换相引起的相角超前有利于减小无刷直流电机的转矩脉动,使电机达到最佳运行状态。
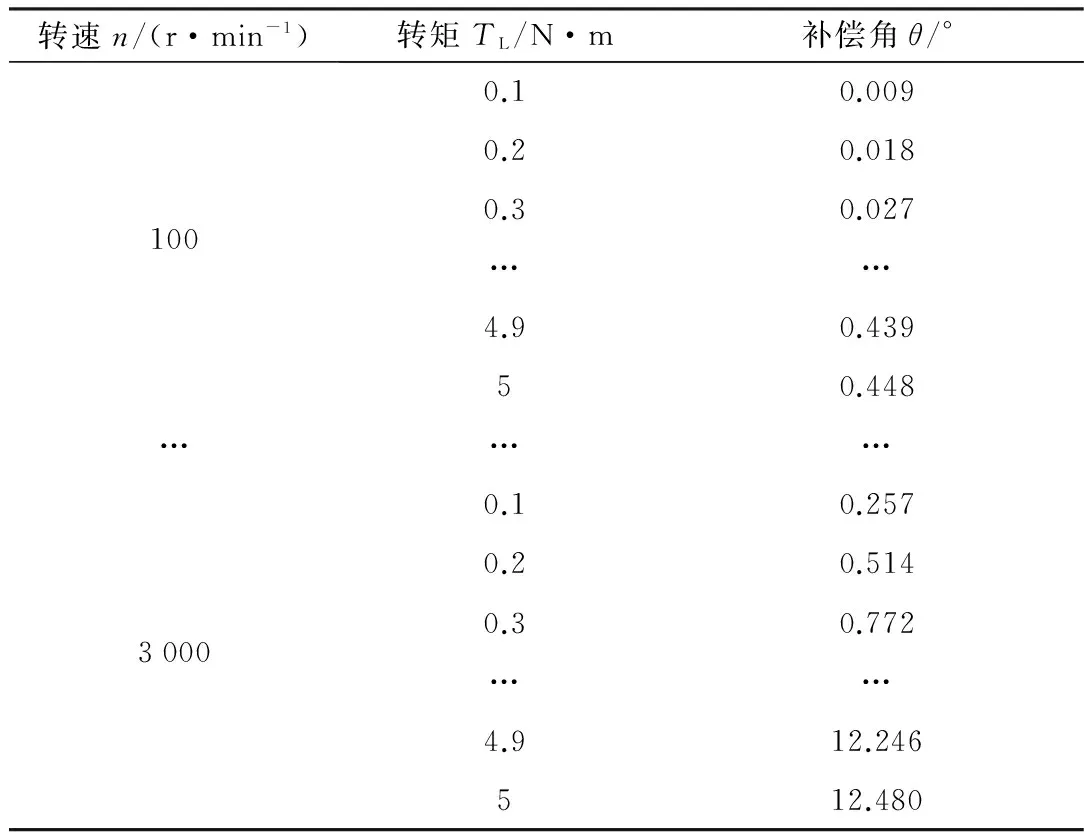
表1 不同负载转矩和转速下的相位补偿角度
3 仿真与实验验证
基于MATLAB/Simulink平台对本文位置补偿方法进行验证。电机驱动系统参数:母线电压U=310 V,电机额定转速3 000 r/min,额定功率1.5 kW,4对极,无位置检测电路中R1=480 kΩ,R2=20 kΩ,C=2.2 uF。
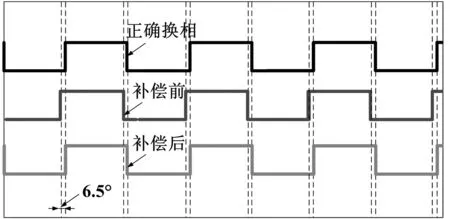
图7为电机在不同负载和不同转速下补偿前和补偿后的位置信号的仿真结果。从图7中可以看出,电机在不同负载转矩和转速下,补偿前的位置信号正确换相信号存在偏差,与经过相位补偿后的位置信号与正确位置信号重合。

(a) TL=5 N·m,n=1 000 r/min

(b) TL=10 N·m,n=1 000 r/min
(c) TL=5 N·m,n=1 500 r/min
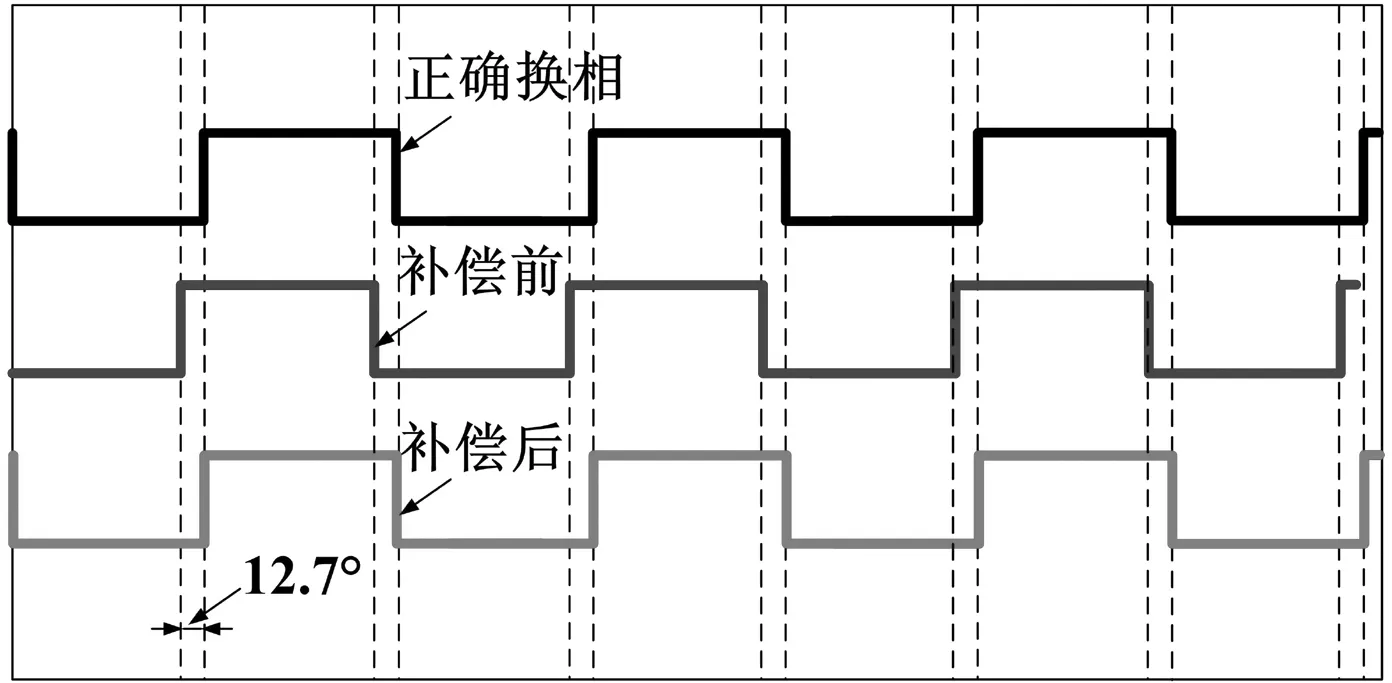
(d) TL=10 N·m,n=1 500 r/min图7 不同负载和转速下补偿后位置检测信号
为了验证补偿的效果,图8给出了电机在不同负载和转矩下位置信号补偿前、后的电流波形图。补偿前的电流波形,由于没有进行相位补偿,换相超前严重,电流发生畸变,很快就导致了换相失败,电机失步。利用本文得到的补偿角进行相位补偿后的电流波形,可以看出,经过相位补偿后其电流波形趋于稳定,转矩脉动较小。
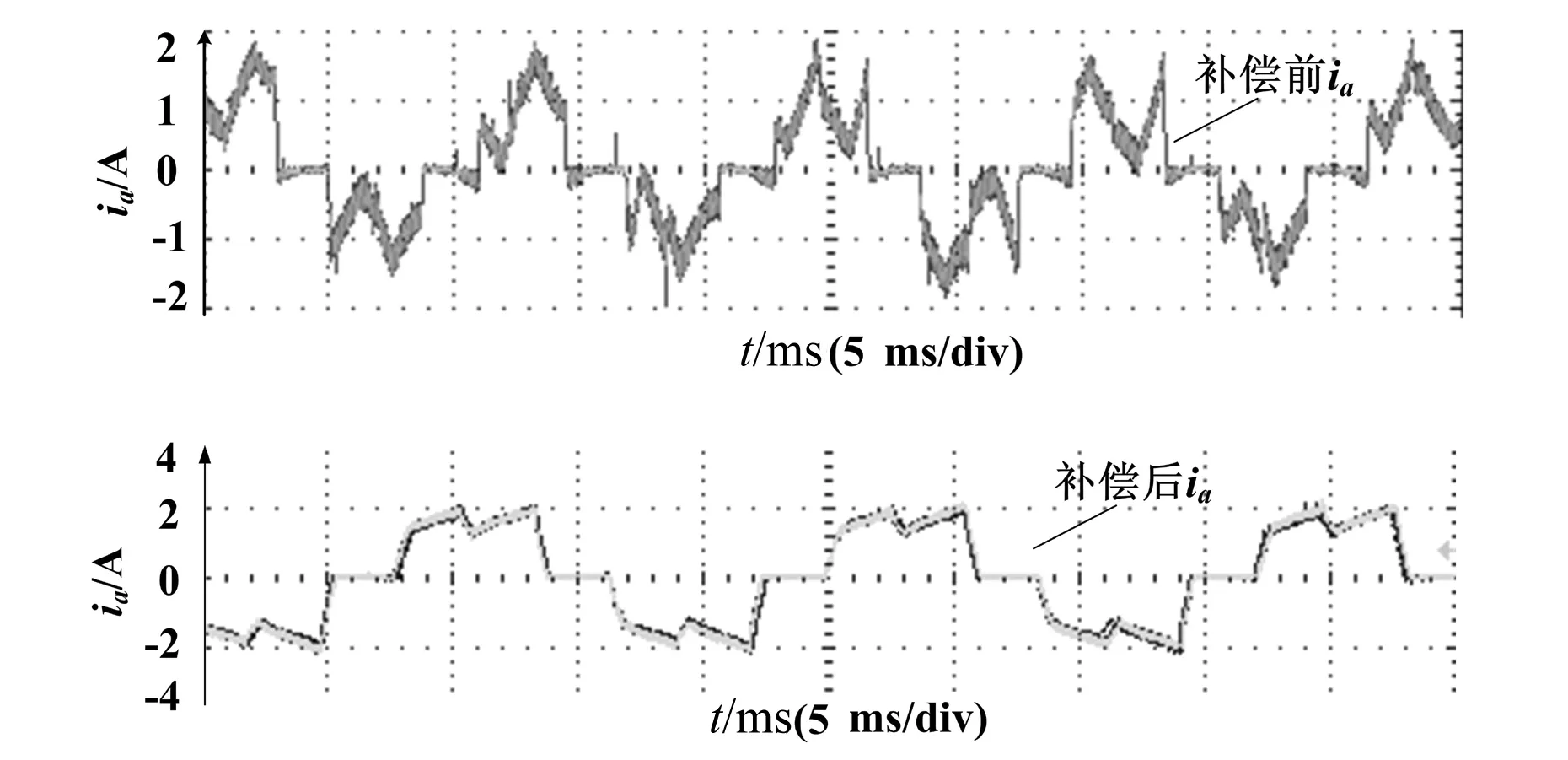
(a) TL=5 N·m,n=1 000 r/min

(b) TL=5 N·m,n=500 r/min
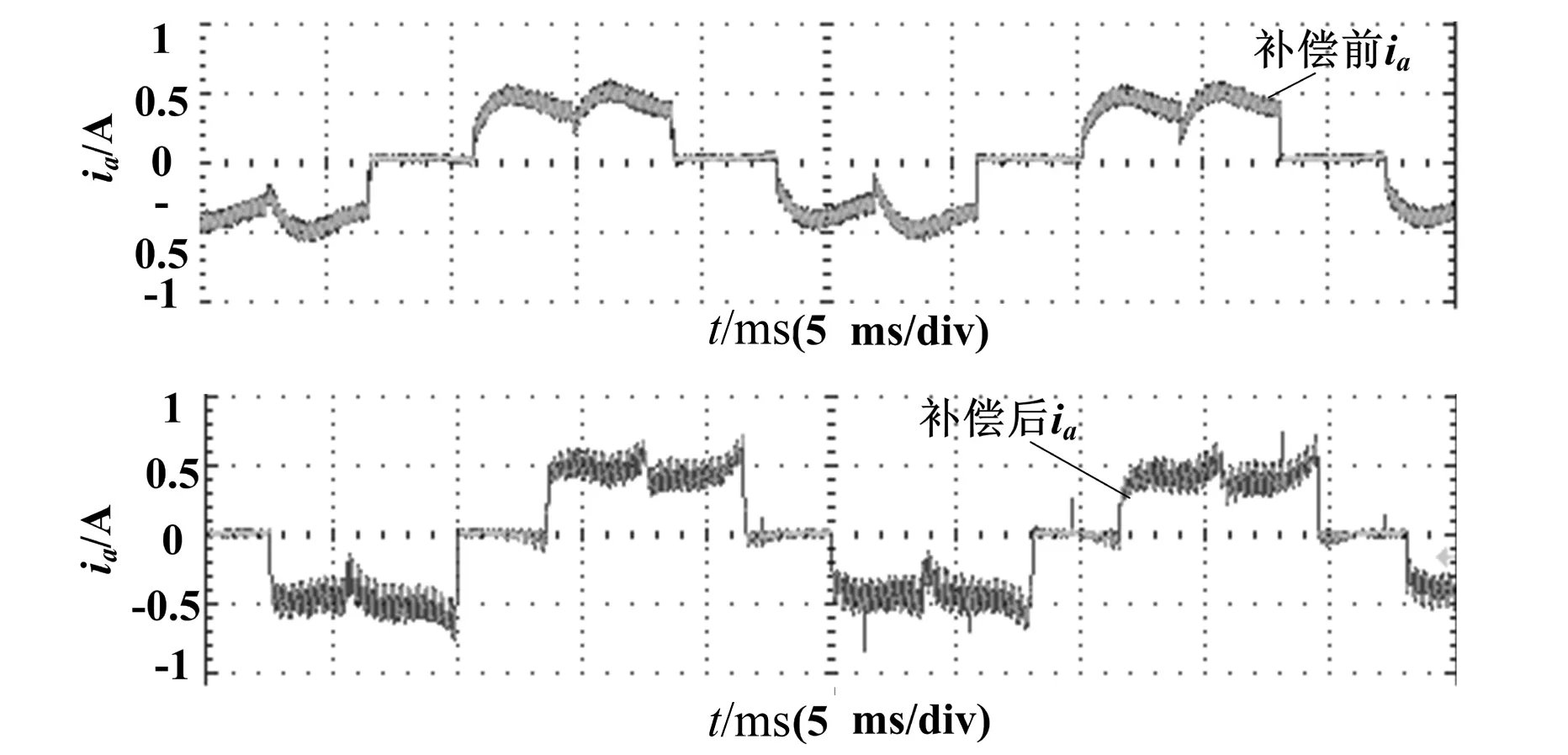
(c) TL=1 N·m,n=500 r/min图8 不同负载转矩和转速下补偿前后电流波形
通过仿真和实验可以看出,当电机负载和转速较大时,经过相位补偿后的位置检测信号的与空载低速下的位置检测信号几乎重合,相电流波形趋于正常。该相位补偿方法克服了反电势法的位置信号随着负载转矩和转速变化的缺点,拓宽了反电势法位置信号的运行范围。
4 结束语
本文分析了基于反电动势的无刷直流电机的相电流续流给位置检测信号带来的影响,详细推导了位置信号超前角度与电机负载转矩和转速的关系。根据具体电机参数绘制了相位补偿角曲线,并对超前的位置信号进行离线相位补偿的方法,得到以下结论:
(1)基于反电动势法的无位置传感器的无刷直流电机会随着电机负载转矩和转速增加会导致位置检测信号超前理想的位置检测信号的相位增大,从而导致换实际相时刻偏离最佳换相时刻,导致重载下电机失步;
(2)针对重载下位置检测信号超前问题可以通过对其进行相位补偿,抑制重载下的位置信号相移,实际系统中补偿角可以根据离线状态下测得,通过查表的方法进行调用;
(3)通过对无位置无刷直流电机的相位补偿可以拓宽无刷直流电机的功率运行范围。
[1] 谭建成. 永磁无刷直流电机技术[M]. 北京:机械工业出版社,2011.
[2] 石坚,李铁才,王孝伟,等. 小电感无刷直流电动机三相H桥无位置传感器控制方法[J]. 中国电机工程学报,2014,34(12):1905-1911.
[3] ACARNLEY P P,WATSON J F. Review of position-sensorless operation of brushless permanent-magnet machines[J]. IEEE Trans. on Industrial Electronics,2006,53(2):352-362.
[4] 沈建新,陈永校. “反电势法”检测无刷直流电动机转子位置的误差分析[J]. 电工技术学报,1989,13(1):10-13.
[5] 韦鲲,任军军,张仲超. 三次谐波检测无刷直流电机转子位置的研究[J]. 中国电机工程学报,2004,24(5):163-167.
[6] 石坚,李铁才,王孝伟,等. 小电感无刷直流电动机三相H桥无位置传感器控制方法[J]. 中国电机工程学报,2014,34(12):1905-1911.
[7] LAI Y S,LIN Y K. A unified approach to zero-crossing point detection of back EMF for brushless DC motor drives without current and hall sensor[J]. IEEE Trans.on Power Electronics,2011,26(6):1704-1713.
[8] SHEN J X,TSENG K J. Analyses and compensation of rotor position detection error in sensorless PM brushless DC motor drives[J]. IEEE Trans. on Energy Conversion,2003,18(1):87-93.
[9] CHEN C H,CHENG M Y. A new cost effective sensorless commutation method for brushless DC motors without phase shift circuit and neutral voltage[J]. IEEE Tran. on Power Electronics,2007,22(2):644-653.
[10] 吴小婧,周波,宋飞. 基于端电压对称的无位置传感器无刷直流电机位置信号相位校正[J]. 电工技术学报,2009,24(4):54-59.
[11] 宋飞,周波,吴小婧. 校正无位置传感器无刷直流电机位置信号相位的闭环控制策略[J]. 中国电机工程学报,2009,29(12):52-57.
[12] SHAO JIANWEN,NOLAN D,TEISSIER M,et al. A novel microcontroller-based sensorless brushless DC(BLDC)motor driver for automotiver fuel pumps[J]. IEEE Trans. on Industry Application,2003,39(6):1734-1740.
[13] ZHANG X Z,WANG Y N. A novel position-sensorless control method for brushless DC motor[J]. Energy Conversion and Management,2011,52(3):1669-1676.
[14] 张磊,瞿文龙,陆海峰,等. 一种新颖的无刷直流电机无位置传感器控制系统[J]. 电工技术学报,2006,21(10):26-30.
[15] JIANWEN SHAO,NOLAN D,HOPKINS T. A novel microcontroller-based sensorless brushless DC(BLDC) motor drive for automotive fuel pumps[C]. IEEE Trans. on Industry Applications Conference,2002:2386-2392.
[16] 杨明,刘杰,徐殿国. 重载条件下无刷直流电机无位置传感器驱动换相续流影响的分析及其补偿[J]. 中国电机工程学报,2013,33(30):106-112.
定稿日期: 2016-10-25
基金项目: 国家自然科学基金面上项目(51477146)
A Study on Commutated Freewheel of Position-sensorless Brushless DC Motors
Xie Haotian, Qin Haihong, Nie Xin, Zhu Ziyue
(Department of Electrical Engineering, College of Automation, Nanjing University of Aeronautics and Astronautics, Nanjing Jiangsu 211106, China)
Waveform distortion of motor terminal voltage will occur when phase current freewheel is switched off during commutation of the brushless DC motor (BLDCM). Such distortion will result in phase lead of position detection signal and deviate from the best commutation time, thus increasing torque ripple and even causing communication failure in case of high load torque and speed, and limiting application scope of BLDCM power of the back-EMF detection method. In this background, this paper analyzes the mechanism for position signal phase lead caused by current freewheel, derives the relationship between lead angle and load torque and speed, and makes phase compensation for position signal under different motor load torques and speeds, thus extending operating range of the position sensorless BLDCM. Simulation and experimental results show that compensated position signal under different load torques and speeds is consistent to the optimal commutation signal and achieves smooth operation in the case of high motor load torque and speed.
brushless DC motor;position-sensorless; back-EMF;freewheel during commutation;compensation
教育部博士点基金资助项目(20123218120017);南京航空航天大学研究生创新基地(实验室)开放基金资助项目(kfjj201466);南京航空航天大学青年科技创新基金(理工类)(NS2015039)、江苏高校优势学科建设工程资助项目。
10.3969/j.issn.1000-3886.2017.02.001
TM761
A
1000-3886(2017)02-0001-04
谢昊天(1990-),男,江苏南京人,硕士生,研究方向为宽禁带半导体器件应用、电机控制、功率变换技术。 秦海鸿(1977-),男,江苏泰州人,副教授,博士,研究方向功率变换技术、电机控制、新器件应用。
定稿日期: 2016-10-07