快速定位定向系统设计及车载实验研究
2017-04-20李瑞涛刘刚石志兴2王海军航空工程学院控制工程系烟台264002北京自动化控制设备研究所北京00074
李瑞涛刘 刚石志兴2王 朕(.海军航空工程学院控制工程系烟台264002.北京自动化控制设备研究所北京00074)
快速定位定向系统设计及车载实验研究
李瑞涛1,刘 刚1,石志兴2,王 朕1
(1.海军航空工程学院控制工程系,烟台264001;2.北京自动化控制设备研究所,北京100074)
定位定向系统是能为载体提供精确地理位置坐标、指北方向和姿态角的导航系统,通常用于舰船、飞机、车辆等功能平台,为平台上的设备提供准确的位置和姿态参考信息。本文针对车载平台机动性高的特点,设计能够实现运动中对准的快速定位定向系统,开展捷联惯导数字递推算法、航位推算、多源信息组合导航、动基座对准算法、系统免标定、误差补偿等算法和技术研究。最后,开展静态对准、静态导航和动态车载实验研究。实验结果表明,动态对准时间小于5min,对准姿态精度小于1mil,方位保持精度小于1mil/2h,横滚角、俯仰角保持精度小于0.5mil/2h,里程计/惯导组合水平定位精度小于0.15%D,卫星/惯导组合水平定位精度小于10m。
定位定向;捷联惯导系统;航位推算;组合导航;初始对准
0 引言
车辆定位定向技术是利用定位定向传感器实时获取车辆位置和姿态信息的技术。车载定位定向系统能够引导车辆行驶,并为车载设备提供准确的地理坐标、北向方位和姿态角参考信息,广泛应用于军事装备中。军事上,固定阵地武器平台性能好、功能全面,但容易被敌方侦察到并摧毁。为提高武器装备的战场生存和作战能力,各国军队列装了大量机动岸防、防空、侦察、预警与电子对抗平台,如自行火炮发射车、增程火箭炮、导弹发射车、指挥车、电子对抗车等。作战平台由固定阵地和预设阵地向随机使用的转变,要求平台自身必须具备感知空间位置与方位的能力,可在静止或机动过程中完成对准,并提供完整的满足精度要求的导航信息。
按技术方案分类,车载定位定向系统可分为平台式惯性导航系统、航位推算系统、捷联惯性导航系统、捷联惯导与多源信息(GNSS、里程计、高度表、地磁、重力、地理信息等)的组合导航系统[2]。其中,捷联惯导与多源信息组合导航系统(以下简称多源系统)因结构简单、可靠性高、可维修性强、使用方便,是目前定位定向系统的主要方案,特别是不依赖外部信息的多源自主导航系统。
国外陆用定位定向系统研究始于20世纪50年代。到20世纪90年代,已有大量定位定向系统装备部队[3⁃5],例如:法国SIGMA30系统、美国数字化旅的侠士155自行火炮、以色列LANSMKIV地面导航系统等。90年代之后,国外定位定向系统结合新技术出现,处于不断完善的阶段。国内陆用定位定向系统研究始于20世纪80年代,研制单位有清华大学、国防科技大学等,最早研制了基于液浮陀螺或挠性陀螺的平台惯导系统,并成规模装备部队。到21世纪国内光学陀螺技术成熟后,开始研制基于激光陀螺或光纤陀螺的捷联式惯导系统。
本文针对各军种电子对抗和侦察车辆,设计快速定位定向系统,以满足电子对抗和侦察车辆灵活机动、快速定位定向的需求,最后开展车载实验研究,验证系统的各项性能指标。
1 系统组成
定位定向设备组成包括:光纤捷联惯性导航单元、里程计、高度计、北斗接收机、导航计算机,以捷联惯导信息为主,综合里程计、北斗、地理信息等,采用Kalman滤波技术实现信息的最优综合以获得导航定位参数。其中,惯性导航单元由光纤陀螺、加速度计、信息处理电路、电源、结构与电气、软件组成,里程计、高度表、北斗用户机均外置。系统组成框图如图1所示。
其中,光纤陀螺零偏稳定性为0.01(°)/h,标度因数稳定性为3×10-5;石英挠性加速度计零偏稳定性为20μg,标度因数稳定性为3×10-5;电子里程计输出正反两路脉冲,转动一圈输出120个脉冲信号;气压高度计测量精度为10m;北斗接收机可以同时接收GPS、Glonass、BeiDou⁃2民码信号,水平定位精度优于10m。
此外,在惯性导航系统侧面设置了姿态基准棱镜,用于在车载平台上安装时,借助光学仪器,使得车辆坐标系和惯导敏感轴对齐;另一方面也可以借助光学仪器,完成对其他车辆或系统的方位与位置传递。
系统实物如图2所示,惯性导航系统组装图如图3所示。
系统电压输入为18V~36V,工作电流小于3A,使用RS422串口输出导航信息。
2 关键导航算法
惯性导航系统通过陀螺仪敏感转动,建立数学平台,通过加速度计敏感加速度,经过积分后得到速度和位置,由于惯性器件误差漂移的存在,惯导系统短时精度高,长时间导航误差呈指数发散;气压高度表测量高度差、里程计测量载车的速度和总路程,能够对惯导速度、位置发散进行约束,进一步对姿态发散进行约束,是惯导系统实现长时间自主定位定向的重要保障;北斗用户机可用于和惯性导航系统进行组合导航,也可以作为路标点与惯性/里程计组合导航系统使用[2]。至此,本文算法设计的思路是以高精度惯导为中心,利用外围传感器信息来有效约束惯导系统误差发散,实现长时间高精度定位定向功能。
本文用到的坐标系有地心惯性坐标系(i系)、地球坐标系(e系)、导航坐标系(n系)和载体坐标系(b系),其定义详见文献[1]。
2.1 捷联惯导数字递推算法
与平台式惯导系统建立机械平台不同,捷联式惯导系统采集陀螺的角速率信息,利用导航计算机计算姿态矩阵,实时在计算机内构造数学平台,利用该数学平台,将加速度计测量值投影到地理坐标系中,经过积分后得到速度和位置信息。因此,捷联式惯导算法通常分为姿态更新、速度更新和位置更新3个步骤完成,而姿态更新对于捷联式惯导系统尤其重要[6]。
本文中,姿态更新使用旋转矢量方法实现,对圆锥误差优化补偿后,得到双子样更新算法,有效解决了旋转中不可交换性误差的问题;速度更新算法引入划船误差补偿,解决了载体在既有线振动又存在角振动环境中引入的速度误差问题;位置更新算法中引入涡卷误差补偿,消除载体做划船运动时引入的位置解算误差[1,6⁃8]。
2.2 航位推算算法
航位推算使用三轴陀螺和里程计作为传感器,得到姿态和里程信息后,用于推算载车相对于起始点的相对位置。通常,里程计输出采样时段内行驶的路程增量,陀螺输出采样时段内的角增量。航位推算由位置更新算法和姿态更新算法组成,原理与捷联惯性解算相似[9]。
假设车辆紧贴路面行驶,没有发生弹跳和侧滑,里程计输出沿车辆主轴方向的速度大小,选取里程计坐标系m系,其原点位于地面,x⁃y⁃z轴分别指向载车右⁃前⁃上,则里程计输出在m系表示为:
其中,vD为里程计测量的速度大小。假设惯导敏感轴与m系重合,即b和m系重合,假设从b系到n系转换矩阵已知,则里程计输出在地理系中表示为:
经过积分后,即可得到航位推算位置更新算法:
航位推算姿态更新算法和捷联惯导姿态更新算法类似,唯一不同在于使用航位推算的速度代替捷联惯导解算的速度,用于计算导航坐标系的转动,由于航位推算的速度误差不发散,因此航位推算姿态更新算法拥有更高的精度。
2.3 多源信息组合导航算法
惯导系统不依赖外部信息,是自主导航系统的理想方案,但其导航误差随时间累积,且呈指数发散。定位定向车辆通常需要长时间工作,仅用惯导系统无法满足精度需求。利用外部测量信息和惯导信息融合,能有效修正或约束惯导误差,本系统中外部信息有里程计测量的里程信息、高度表测量的高度信息、北斗接收机测量的位置速度信息。
里程计和高度表不容易受干扰,但误差缓慢发散,有偏系统;北斗接收机测量无偏,但容易受干扰。设计组合导航系统可以使用惯导分别与里程计、高度表、卫星组合滤波,然后再用联邦Kalman滤波算法对子滤波器结果进行综合。该方案子系统之间不相互干扰,系统鲁棒性强,但算法复杂且运算量大。在使用高精度惯导的情况下,系统误差发散缓慢,由惯导、航位推算、卫星导航解算的姿态、速度、位置相近,因此可以使用一个扩展Kalman滤波器实现惯导/里程计/高度表/卫星组合导航系统,简化系统设计复杂度,增加使用的灵活性。
根据各个系统的需求,扩展Kalman滤波器的状态量选择为:
状态量分别为三维姿态误差、速度误差、位置误差、陀螺零偏误差、加速度计零偏误差、钟差、钟漂。状态转移方程根据各误差的定义来设置。
观测量分别为航位推算位置误差、高度表高度误差、卫星导航伪距误差。当某个分系统失效时,则去除相应的观测量,如此便可灵活地实现各种组合方式,典型的如惯性/卫星组合导航、惯性/里程计/高度表组合导航等。
2.4 动基座对准算法
惯导系统工作之前要对其姿态、速度、位置进行初始化(对准),初始化精度越高,则纯惯性导航误差发散越慢。通常惯导系统初始对准分为粗对准和精对准两个阶段。
粗对准利用重力矢量和地球自转矢量,通过解析的方法求取初始姿态矩阵,矩阵形式为:
粗对准结束后,通常使用Kalman滤波器开始静基座精对准。但存在两个问题,一是载车要求静止,限制了机动性能;二是航向角可观测性差导致收敛速度慢且精度一般。在静基座精对准过程中,俯仰角和横滚角收敛快,而航向角收敛慢。针对这一特点,本文的精对准思路是:粗对准结束后,先用静基座Kalman滤波器进行精对准,约30s俯仰角和横滚角收敛后,载车开始行驶,利用惯导轨迹与航位推算轨迹相似性实现航向角对准[6,10⁃11]:
其中,Δ~Sh是起始点到终点的航位推算水平面内位移,ΔSh是起始点到终点的真实水平面内位移(由卫星导航接收机给出),φDU为航向角误差,对航向角进行修正后即完成了航向角精对准,终点到起始点的位移越大,则航向角对准精度越高。
3 误差补偿算法
3.1 杠杆臂补偿
当卫星导航天线、惯导坐标原点、里程计坐标原点不重合,载车发生转动时,将引起各子系统位移不一致而将误差引入系统中。因此,需要对杠杆臂进行误差补偿。以北斗卫星天线与惯导之间的杠杆臂为例,设从惯导坐标原点到卫星天线中心的杠杆臂向量为lb,则惯导与卫星导航系统之间速度、位置关系为:
其中,Mpv是仅与纬度有关的常值转换矩阵。
3.2 免标定技术
本文设计的组合导航系统在卫星导航、航位推算功能正常时,能够估计陀螺零位、加速度计零位、里程计误差系数等标定参数,并写入flash存储,实现自标定功能,具有实用意义。
4 实验验证
为了验证本文设计的定位定向系统性能,在实验室环境开展了静态对准、静态导航实验,之后开展动态跑车实验。
4.1 静基座对准实验
将惯导放置在转台上,转台分别旋转至1~4象限,每个位置进行6次静基座对准实验,对准结果如表1所示。
6次对准结果取均值,得到1~4象限对准误差依次为:0.1737mil、0.4239mil、0.2754mil、0.3598mil,误差均值为0.4239mil。
4.2 静态导航实验
调整转台倾角为0°,在水平方向均匀选取6个方位,作为测试方位依次进行。设备通电,进行初始对准,对准结束后进入导航状态,记录初始方位角和水平姿态角。每隔10min转动转台方位10°、俯仰转动5°后回到当前初始位置,查看转动过程中方位和姿态变化情况,每20min记录一次方位角和水平姿态角。在一个方位上连续工作2h后,在进行下一个方位的测量。实验结果如表2~表4所示。

表1 静基座对准实验结果Table 1 Test results of stationary alignment [unit:(°)]
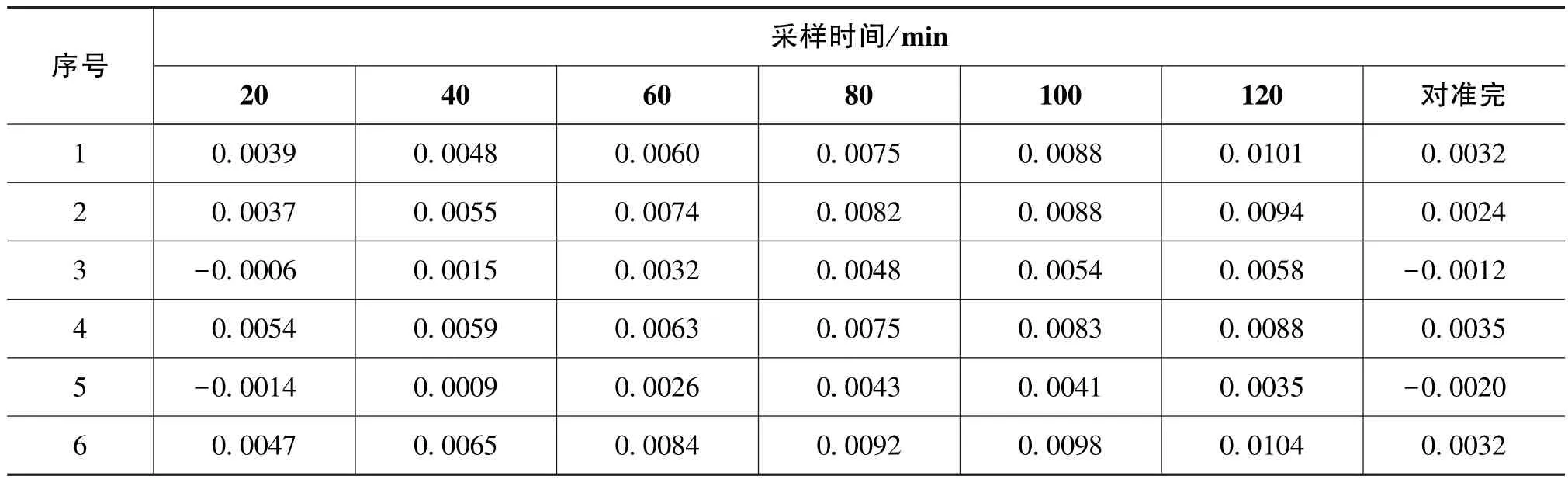
表3 俯仰角保持精度测试结果Table 3 Test results of pitch holding accuracy [unit:(°)]

表4 横滚角保持精度测试结果Table 4 Test results of roll holding accuracy [unit:(°)]
航向角1~6次保持精度均值依次为:0.6250mil、 0.5717mil、 0.4283mil、 0.4517mil、0.2517mil、1.0000mil,均值为0.6011mil;俯仰角1 ~6次保持精度均值依次为:0.115mil、0.1166mil、0.1066mil、0.0883mil、0.0916mil、0.12mil,均值为0.12mil;横滚角1~6次保持精度均值依次为:0.1683mil、0.118mil、0.13mil、0.095mil、0.15mil、0.1466mil,均值为0.1683mil。
4.3 动基座对准实验
本文设计的定位定向系统具有快速启动和行进间对准功能。定位定向系统通电以后,不需要载车保持静止长时间停车状态完成对准后再行驶,初始完成30s粗对准后即可行车,在行车过程中利用里程计信息完成定位定向系统的初始对准,整个对准时间不大于10min。开展了11次动基座对准实验,结果如表5所示。
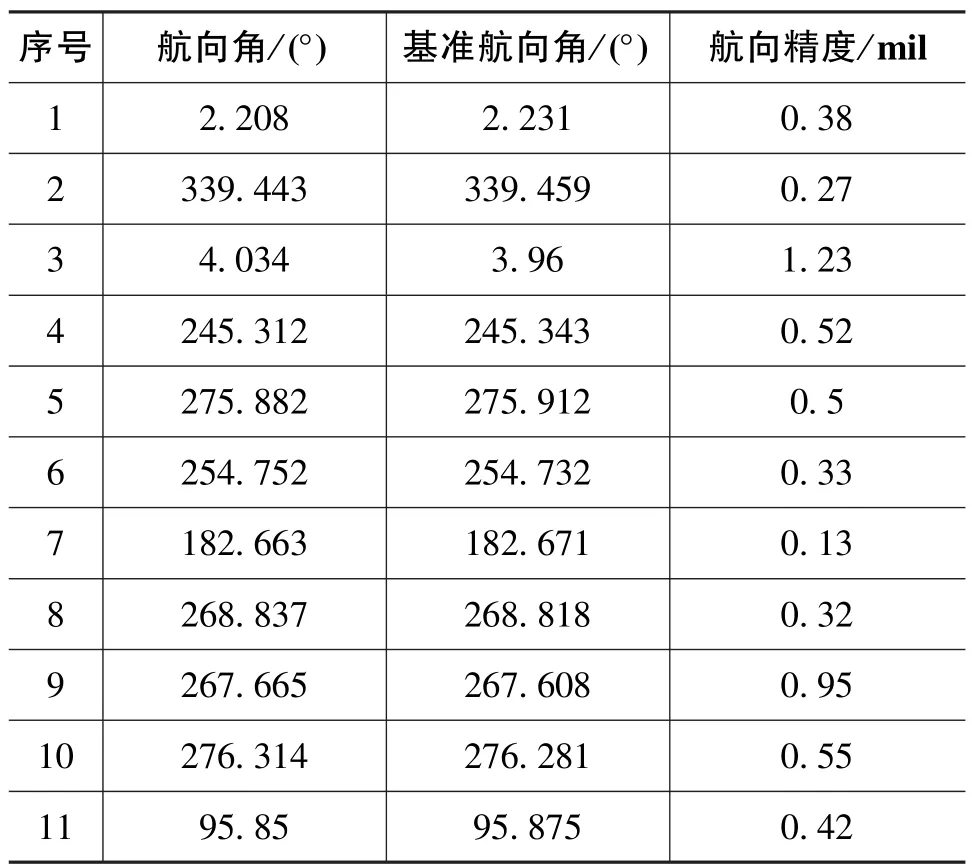
表5 里程计辅助动基座对准实验数据Table 5 Test results of odometer aided in⁃motion alignment
对航向精度求均值,得定位定向系统动基座对准精度为0.59mil。
4.4 动态跑车实验
为了验证定位定向系统的动态导航性能,开展了跑车实验测试工作,以差分GPS(精度优于1m)定位结果作为基准,跑车路线为北京六环或京石高速公路,定位定向设备完成对准后转导航,最快行驶速度超过120km/h。
跑车路线如图4所示,跑车过程中由北斗接收机和高度表测量的高度信息如图5所示,组合导航系统位置与差分GPS接收机位置误差如图6所示。
由于跑车过程中,差分GPS天线容易被高楼遮挡,出现跳点,因此图中出现很多尖峰,剔除尖峰后,定位定向系统位置误差峰峰值在50m以内。
为进一步量化定位定向系统的位置误差,选取一段开阔的直线路段,开展6次测试,水平定位精度结果如表6所示。
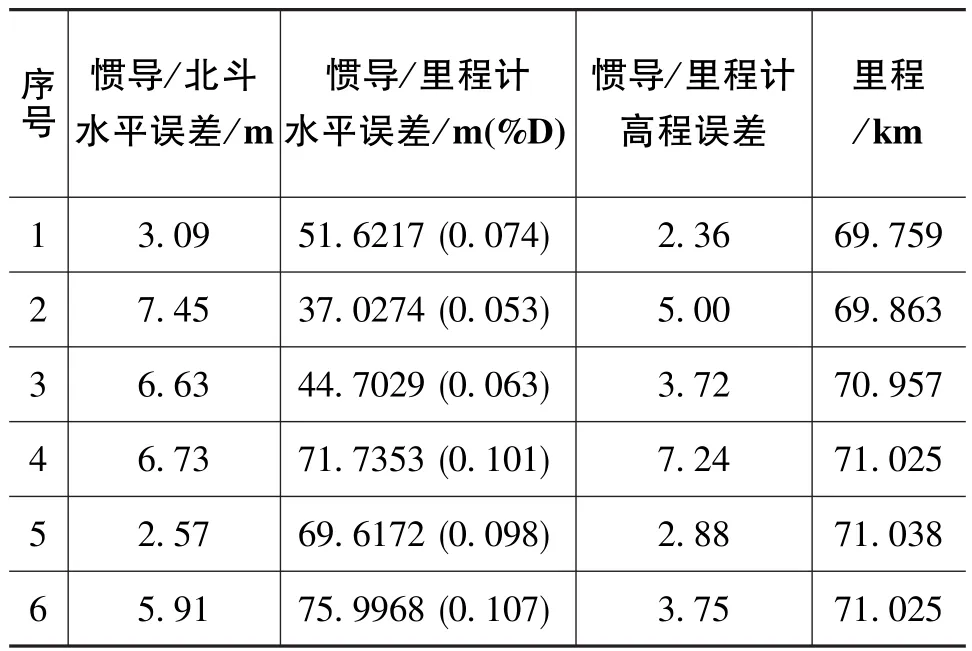
表6 定位定向系统位置精度测试数据Table 6 Test results of position accuracy
对上述结果取均值,得惯导/卫星组合导航水平误差为5.71m,惯导/里程计组合导航水平误差为58.45m(0.085%D,D为总里程),高度误差为4.46m。
5 结论
本文针对军用武器装备平台对定位定向精度、机动性能等的要求,设计了惯导/卫星/里程计/高度表组合定位定向系统,开展了捷联惯导数字递推算法、航位推算算法、多源信息组合导航算法、动基座对准算法、误差补偿算法的研究。静态实验和动态实验表明,本文设计的定位定向系统动态对准时间小于8min,对准姿态精度小于1mil,方位保持精度小于1mil/2h,横滚角、俯仰角保持精度小于0.5mil/2h,里程计/惯导组合水平定位精度小于0.15%D,卫星/惯导组合水平定位精度小于10m。
[1] 秦永元.惯性导航[M].北京:科学出版社,2006. QIN Yong⁃yuan.Inertial navigation[M].Beijing:Science Press,2006.
[2] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009. XIE Gang.GPS principle and receiver design[M]. Beijing:Electronics Industry Perss,2009.
[3] 吕小红,张玲翔.飞航导弹发射车自动定位定向技术[J].飞航导弹,1995(5):55⁃62. LV Xiao⁃hong,ZHANG Ling⁃xiang,Self⁃positioning and orientation technology for winged missile launch vehicle [J].Winged Missile Journal,1995(5):55⁃62.
[4] 张韶华.地炮火控系统的现状及发展概况[J].火力与指挥控制,2000,25(2):8⁃14. ZHANG Shao⁃hua. Summary offield artillery fire command system[J].Fire Control&Command Control,2000,25(2):8⁃14.
[5] 华菊仙.国外陆军陆地导航系统装备与发展动向[J].外军炮兵,1997(12):3⁃6. HUA Ju⁃xian. Equipmentand developmenttrend of foreign army land navigation system[J].Foreign Artillery,1997(12):3⁃6.
[6] 严恭敏.车载自主定位定向系统研究[D].西北工业大学,2006. YAN Gong⁃min. Research on vehicle autonomous positioning and orientation system[D].Northwestern Poly⁃technical University,2006.
[7] Savage P G.Strapdown inertial navigation integration algo⁃rithm design part 1:attitude algorithms[J].Journal of Guidance,Control,and Dynamics,1998,21(2):19⁃28.
[8] Savage P G.Strapdown inertial navigation integration algo⁃rithm design part 2:velocity and position algorithms[J]. Journal of Guidance,Control,and Dynamics,1998,21 (2):208⁃221.
[9] Vicek C,Mclain P,Murphy M.GPS/dead reckoning for vehicle tracking in the“urban canyon”environment[C]. Proceedings of the IEEE⁃IEE Vehicle Navigation and In⁃formation Systems Conference,1993,10:A36⁃37.
[10] Miao L J,Shen J,Liu W,et al.Initial alignment tech⁃nique for SINS of vehicles in the moving state[J]. Journal of Beijing Institute of Technology,2002,11(3): 234⁃239.
[11] 郭振西,缪玲娟,沈军.里程计组合的捷联惯导系统运动基座对准研究[J].北京理工大学学报.2005,25 (1):66⁃69. GUO Zhen⁃xi,MIAO Ling⁃juan,SHEN Jun.Study on strapdown inertial navigation system moving based align⁃ment with SINS/DTU integration[J].Journal of Beijing Institute of Technology,2005,25(1):66⁃69.
Design and Field⁃test of Vehicle Position and Azimuth Fast Determining System
LI Rui⁃tao1,LIU Gang1,SHI Zhi⁃xing2,WANG Zhen1
(1.Department of Control Engineering,Naval Aeronautical and Astronautical University,Yantai 264001; 2.Beijing Institute of Automatic Control Equipment,Beijing 100074)
Position and azimuth determining system(PADS)are systems providing accurate geographical coordinate,azimuth and attitude information for vehicle.The PADS is usually mounted on warship,airplane,vehicle,adopted as posi⁃tion and attitude reference standards.To enhance the vehicle weapon platform's fast reaction ability,this paper designed a PADS which carries out initial alignment in moving mode.A set of strapdown inertial navigation system(SINS)algorithms,high accuracy dead reckoning(DR)algorithms,multi⁃source integrated navigation algorithms,initial alignment algorithms in moving base,calibration free algorithms and error compensation algorithms are studied in this paper.Static and field test results show the flowing performances:initial alignment time cast in moving base is less than 5 minutes,initial alignment attitude accuracy and azimuth holding accuracy are prior to 1 mil,pitch and roll attitude accuracy are 0.5 mil per 2 hours,horizontal position errors of SINS/DR integrated system are below 0.15%D,where D is the total mileage,horizontal posi⁃tion errors of SINS/GNSS integrated system are below 10 meters.
position and azimuth determining;inertial navigation system;dead reckoning;integrated navigation; initial alignment
U<666.134 文献标志码:A class="emphasis_bold">666.134 文献标志码:A 文章编号:1674⁃5558(2017)01⁃01297666.134 文献标志码:A
1674⁃5558(2017)01⁃01297
A 文章编号:1674⁃5558(2017)01⁃01297
10.3969/j.issn.1674⁃5558.2017.02.003
李瑞涛,男,硕士,副教授,研究方向为飞行器导航制导与控制技术。
2016⁃07⁃27
