影像辅助下LiDAR数据建筑物轮廓信息提取
2017-04-17王春林孙金彦周绍光钱海明黄祚继
王春林, 孙金彦, 周绍光, 钱海明, 黄祚继
(1.安徽省(水利部淮河水利委员会)水利科学研究院,合肥 230088; 2.安徽省大禹水利工程科技有限公司,合肥 230088; 3.河海大学地球科学与工程学院测绘科学与工程系,南京 210098)
影像辅助下LiDAR数据建筑物轮廓信息提取
王春林1,2, 孙金彦1,2, 周绍光3, 钱海明1,2, 黄祚继1,2
(1.安徽省(水利部淮河水利委员会)水利科学研究院,合肥 230088; 2.安徽省大禹水利工程科技有限公司,合肥 230088; 3.河海大学地球科学与工程学院测绘科学与工程系,南京 210098)
针对复杂场景中提取的建筑物外轮廓锯齿状变形及精度不高等问题,提出了一种新的轮廓信息提取方法。在综合利用LiDAR数据及影像特征的基础上,建立轮廓线提取候选区,计算候选点的方向、梯度及高边点信息,引入基于活动轮廓的图割算法(graph cuts based active contour model,GCBAC)构建并解算轮廓线能量函数,实现建筑物轮廓信息的精确提取。通过3个具体实例证明了该方法的有效性和可行性。
LiDAR; 建筑物轮廓; 活动轮廓; 图割; 影像
0 引言
建筑物的检测和提取为地理信息系统数据库的更新及应用提供了基础数据,具有十分重要的现实意义。对于如何提取建筑物轮廓信息,国内外学者开展了大量研究[1-9],其中较有代表性的一类为利用LiDAR数据和影像数据的方法。LiDAR数据含有准确的高度和位置信息,而影像数据含有更为丰富的边缘信息,基于这2种数据源的建筑物轮廓提取方法,利用两者互补的优点,得到了广泛应用。程亮等[1]利用LiDAR密度分析与K-means聚类方法,从Hough变换提取的直线段中筛选出准确的轮廓信息。李云帆等[5]采用基于线支撑区域的直线段提取算法结合建筑物几何特征,得到了准确的建筑物外轮廓。上述方法提取的建筑物轮廓定位准确,但是均建立在建筑物提取结果的基础上,需要一定的人工参与,且对影像质量有要求,边缘特征明显,才能提取出大量有效直线段。Chen等[6]先将基于区域的分割和基于知识的分类相结合提取建筑物斑块,再利用canny算子检测初始边缘,然后在边缘缓冲区中使用Hough变换得到三维直线,最后基于分裂合并成形法,将这些三维直线组合起来形成建筑物轮廓。谭衢霖等[7]采用面向对象分类分析方法有效提取了不密集城区的建筑物,但是该方法对建筑物分布密集的城区不适用。Turker等[8]利用SVM分类器,采用NDVI指数及归一化数字表面模型(nDSM)等提取建筑物斑块,然后采用Hough变换和随机Hough变换分别对不同几何形状的建筑物斑块逐一处理。
以上建筑物轮廓提取方法均需先提取建筑物信息(例如建筑物点集、建筑物斑块等)。这些建筑物信息的边缘均会出现锯齿状变形等问题,严重影响随后的建筑物规则化处理结果,需要一定的人工参与。目前这一问题的解决主要依靠数学形态学方法(形态学腐蚀、形态学膨胀等)和线状要素化简算法(DP算法等),但这些方法的人工参与度均较高,不同类型的建筑物、数据源和提取精度均需要不同的参数阈值。
为了适应不同数据源、形状及建筑物提取精度的需要,提出了一种获取建筑物轮廓信息的新方法,充分利用高空间分辨率影像及LiDAR数据的优点,以实现复杂场景中建筑物外轮廓信息的自动化准确提取。
1 算法步骤
建筑物轮廓信息提取算法流程如图1所示。
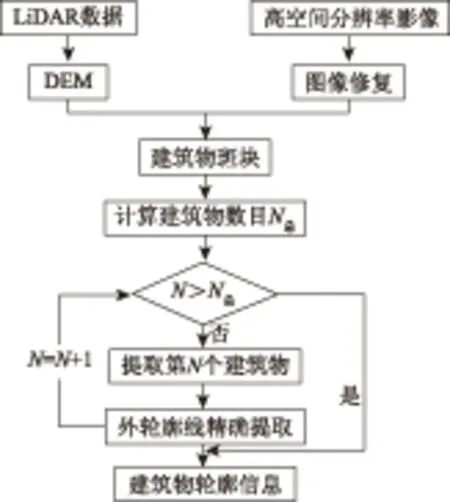
图1 算法流程
1.1 “真”正射影像缺失信息修复
虽然所采用的高空间分辨率航空影像已经进行了正射校正,并与LiDAR数据配准,但是校正引起的被遮挡区域信息缺失并没有解决,所以需要将缺失的信息进行修复和弥补,以降低缺失信息对整体提取结果的影响。由于影像中不存在大面积的信息缺失,部分缺失区域与建筑物紧密相连,而且常规从四周向中心逐渐推进的修复方式会将建筑物信息向缺失区域扩散[10],因此采用Criminisi等[11]提出的一种基于像素优先权的图像修复方法对其进行修复,以减弱缺失信息对最终结果的影响。
本文选取图幅为212像素×342像素、空间分辨率为9 cm的“真”正射影像为实验数据,其缺失信息修复结果如图2所示。图2(a)为原始图像,影像中存在一些缺失区域(黑色),尤其是建筑物边缘位置较为明显; 图2(b)为修复结果,整体修复效果较好,尤其是建筑物信息被修复的同时并没有向缺失区域扩散。

(a) 原始图像 (b) 修复结果
图2 图像修复实验
Fig.2 Image inpainting experiment
1.2 建筑物斑块获取
利用LiDAR数据和高空间分辨率影像,采用常规提取流程来提取建筑物信息: 首先在预处理后的LiDAR数据基础上,采用渐进形态学滤波[12]结合NDVI指数去除LiDAR数据中的非地面点; 然后分步去除道路、植被及墙面点等非建筑物屋顶点,利用形态学腐蚀和连通性分析得到种子区域,基于区域生长分析判断得到完整的建筑物斑块。
1.3 建筑物外轮廓线精确提取
1.3.1 GCBAC算法
基于活动轮廓的图割(graph cuts based active contour model,GCBAC)算法是Xu等[13]在2001年提出的一种迭代的图像分割方法。随后Xu[14],Tao[15],Zheng和Dong[16-17]等学者对其加以深化、改进,多用于医学图像分割。鉴于GCBAC算法的优点,本文将GCBAC算法应用于高空间分辨率影像建筑物外轮廓线的精确提取。GCBAC算法能量函数形式为
E=Eexternal=∑p,q∈Vc(p,q),
(1)
式中:Eexternal表示外部能量函数;c(p,q)是像素点p和q之间的无向弧权重,c(p,q)=c(q,p)。
精确提取建筑物外轮廓线的主要思路为: 对逐个建筑物进行处理,首先建立初始轮廓线候选区; 再将当前候选区外边缘与背景s相连,将候选区内边缘与前景t相邻,构建图(graph); 然后在当前候选区内,借助能量函数最小值原则,利用graph cuts中最大流算法(Boykov方法[18])解算图,从而得到当前候选区的全局最优解; 最后以此次提取结果作为下一次迭代的初始轮廓线,重复上述过程,直到前后2次优化的轮廓线基本相同或者达到一定的迭代次数。
1.3.2 图的构建
为了利用graph cuts算法来解算能量函数,需要先基于原始数据构建图G(V,U)。其中,V是轮廓候选区内所有像素点以及2个虚拟节点s和t的集合,U是所有连接弧(也称“链”,分为N链和T链2种)的权重集合,如图3所示。

(a) 轮廓线(b) 候选区(c) 图[15]
图3 图G(V,U)的构建
Fig.3 GraphG(V,U) construction
每一个像素点映射为图中的一个节点q∈V。假如2个像素点相邻,则其对应节点间存在一条无向弧(p,q)∈U。根据像素点p和q间的相似性度量为此弧赋权重c(p,q): 二者相似性越大,权重越大。每一条可能的轮廓线都对应着图上的一个割(s,t),它将候选区影像切分成2个部分s和t。本文采用2点之间的方向能量Ed和梯度模能量Eg之和的方法来确定每个相邻点连接弧的权重c(p,q),即
c(p,q)=Ed(p,q)+Eg(p,q)。
(2)
1.3.2.1 方向能量Ed获取
对于相邻像素点p和q,如果其连线与当地边缘方向垂直,则为此弧赋予最小的方向能量; 如果其连线与当地边缘方向平行,则为此弧赋予最大的方向能量; 其连线与当地边缘方向相交成45°或135°,为此弧赋予中等的方向能量。例如图4中,以像素点p为中心,蓝色线表示与当地边缘方向相交成45°或135°的连接弧,黑色线表示与当地边缘方向相交成0°或90°的连接弧。

图4 像素点p的8邻域系统
各连接弧的方向能量Ed表达式为
Ed(p,q)=Ep,q(p)+Ep,q(q),q∈{q1,q2,…,q8},
(3)

(4)
式中:Ep,q(p)和Ep,q(q)分别表示像素点p和q的方向能量;K为方向权重系数,本文默认为60;dp和dq分别表示像素点p和q的方向,而d0表示像素点p和q之间连线的方向。
1.3.2.2 梯度模能量Eg获取
相邻2点之间的平均梯度值越大,所赋予能量越小,反之亦然。此外,为了使得优化的边缘更为准确,除了加入边缘的梯度信息外,还应加入高程信息。梯度模能量Eg的计算公式为
Eg(p,q)=g(p)+g(q),
(5)
(6)
式中:g(p)和g(q)分别为点p和q的梯度模能量值;gradp∈S(p)表示点p的梯度模; max(gradi∈S(i))表示所有梯度模中的最大值,用来归一化梯度模; 参数λ1为梯度值权重系数,本文默认为0.9; 参数λ2为边缘权重系数。定义高边点为局部窗口内高度大于一定阈值条件的点。如果点p是高边点,即点p为边缘点的可能性很大,此时变量h=1; 否则,h=0。
1.3.2.3 高边点获取
在nDSM数据中,以任意像素点p为中心,在其8邻域内计算每个像素点与p点的高程差值,如果某一像素点的高程差值大于指定阈值(默认2 m),则认为该点为高边点。文中采用较为简单的方法计算方向数据和梯度模。假设影像为灰度图像,首先依次利用4个方向模板(图5中模板方向分别0°,90°,45°和135°)对图像进行卷积。
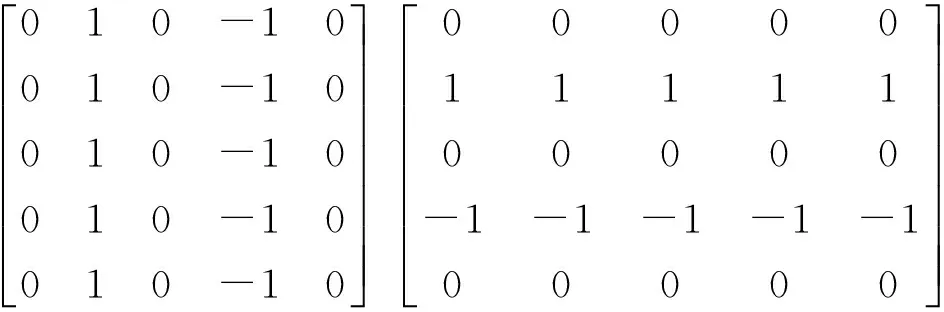
(a) 0° (b) 90°
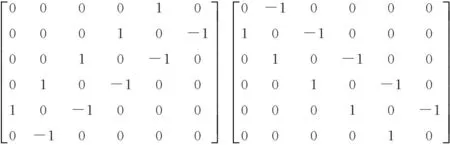
(c) 45°(d) 135°
图5 4个方向模板
Fig.5 Four directions templates
令卷积结果为T1,T2,T3和T4。计算出T1,T2,T3和T4的绝对值。此时每个像素点对应有4个非负的灰度梯度值,以最大灰度梯度值作为当前点的梯度值,同时记录最大灰度梯度值对应的方向信息。对于多光谱数据,将每一个波段都作为灰度影像处理后加权得到最终的梯度值。
在获取每个像素点的方向、梯度模以及是否为高边点等信息的基础上,确定相邻像素点连接弧的权重c(p,q)。至此给出了所有链的权重,完成了图的构建。
1.3.3 外轮廓提取具体步骤
轮廓线提取算法流程如图6所示。以一栋建筑物为例,对本文算法步骤及结果进行详细描述,如图7所示。

图6 外轮廓线提取算法流程
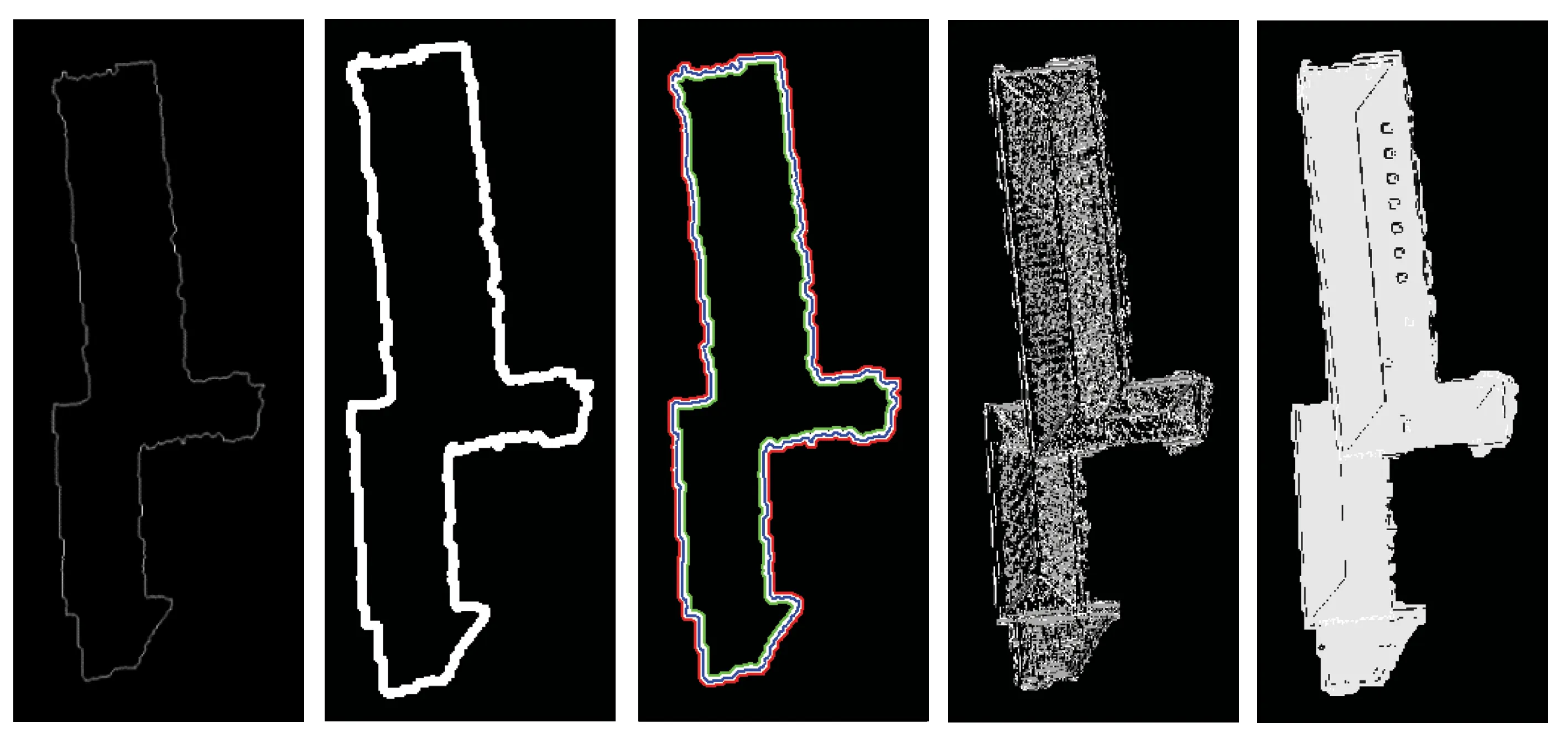
(a) 初始轮廓线 (b) 候选区 (c) 边缘线 (d) 方向 (e) 梯度模
(f) 第一次迭代 (g) 第一次优化结果 (h) 终止迭代 (i) 最终轮廓线 (j) 叠加原图
图7 建筑物外轮廓线提取实验
Fig.7 Experiment of boundary extraction
1)以0表示背景,以1表示初始轮廓线c0,生成一幅二值影像(如图7(a)),令i=0,N0为初始轮廓线c0中所有边缘点,数目;
2)以适当大小(默认为3)的结构元素膨胀初始轮廓线,在其邻近区域内生成轮廓线候选区,记录下候选区的内外边缘线。图7(b)为使用结构元素半径为5的“disk”元素进行形态学膨胀。
3)将候选区的内边缘线(图7(c)中绿色线)上所有节点与虚源点si相连,候选区的外边缘线上(图7(c)中红色线)所有节点与虚汇点ti相连,相应的连接弧(T链)的权重为无限大。
4)将候选区内所有点都作为普通节点,构建对应于候选区影像的邻接图Gi(Vi,Ui)。使用候选区的方向数据(图7(d))和梯度模(图7(e)),确定相邻点连接弧(N链)的权重Ui;
5)利用文献[15]中最大流算法解算图Gi(Vi,Ui)的s-t最小割MC(Gi,si,ti),si={p:xp=1},ti={p:xp=0},以获取分开候选区条带内外边缘线的轮廓线,即
ci+1=argminc∈CN(ci)U(c),
(7)
式中U(c)是割MC(Gi,si,ti)需要付出的代价。
6)以轮廓线ci+1为下一次迭代的初始轮廓线,i=i+1,返回步骤1),重复执行,直到相邻2次优化结果相同或者迭代次数达到3次为止。计算相邻2次迭代中仍在变化的边缘点数目N|ci+1-ci|,若N|ci+1-ci|<0.05N0,即仍在变化的边缘点很少,则认为这2次优化结果基本相同。经过实验发现,当迭代次数为3次时,前后2次优化结果已经变化不大,且此时的轮廓线精度已经满足要求,增加迭代次数,精度反而会下降。图7(f)中灰白交界线是第一次迭代解算图G(V,U)所得结果。图7(g)为第一次优化后的建筑物轮廓线。图7(h)中灰白交界线是终止迭代时得到的结果。图7(i)为最终提取的建筑物轮廓线,将其叠加到影像中如图7(j)所示。
7)优化轮廓线验证。由于多种因素(如边缘特征不明显)的影响,优化后的轮廓线并不一定是准确的。通过2个步骤加以验证: 一是检测相似度。计算优化后的轮廓线中所有边缘点与其在初始轮廓线中对应点之间距离的平均值,如果平均值大于阈值(默认为1 m),则认为优化结果与初始轮廓线不相似; 二是检查边缘点数目的变化。计算优化结果与初始轮廓点数目差值,如果差值大于阈值(默认为0.4倍的初始轮廓点数目),说明优化过程中抛弃了太多的建筑物细部结构,即优化结果不准确。
对比图7(a)和(j),经过优化后的建筑物轮廓线与初始轮廓线相比,去除了锯齿状噪声,轮廓线更为平直,与建筑物吻合较好。
1.4 结果评价方法
采用2种方法评价上述提取效果。一是定性对比,即将结果与原图叠合,与分割结果或其他方法及人工识别结果比较; 二是定量分析,即采用完整度和正确率进行评价[1]。2个衡量参数的最佳值均为“1”,即100%。实验数据为WGS-84坐标系。结果评价中采用的参考数据(groundtruth)为由ArcGIS人工矢量化数据。
2 实验与分析
按照建筑物形状从简单到复杂的顺序选取3组实验样本,采用不同数据源对本文提出的算法进行实验,验证算法的有效性。
2.1 实验1
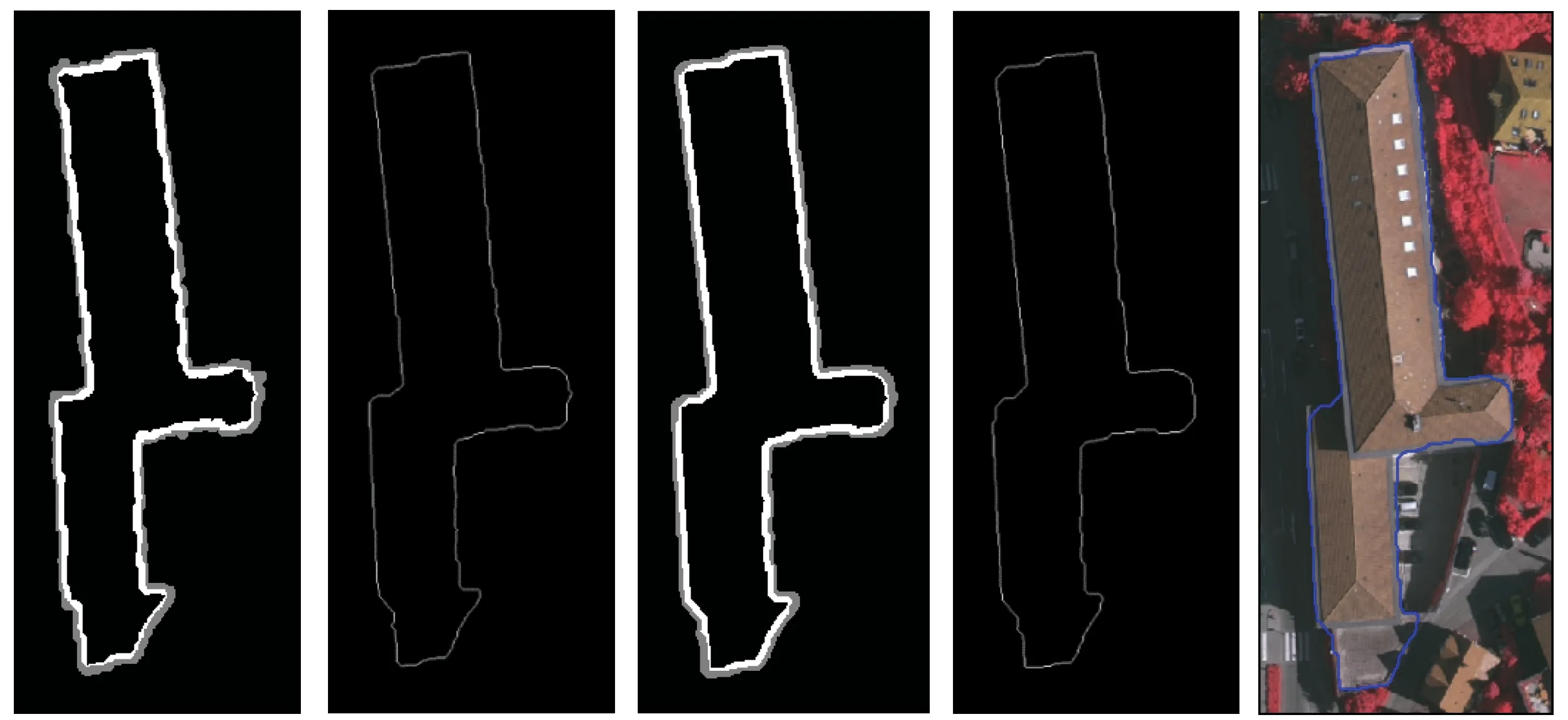
实验1为简单场景区,数据源为航空影像和LiDAR数据。实验遥感影像空间分辨率为0.13 m、平均点数为6个/m2。实验结果如图8所示。

(a) 修复后影像 (b) 提取结果 (c) 叠加影像 (d) 参考数据
图8 实验1
Fig.8 Experiment 1
对于形状简单的建筑物,从定性对比的角度,本文提取的轮廓线与建筑物轮廓实际位置非常接近,与参考数据差异很小,形状相似。从定量分析的角度,实验1的提取精度较高,完整度为0.982,正确率达到0.953。但是因面积阈值的限制,遗漏了一些面积小于10 m2的超小型建筑物。
2.2 实验2
实验2为固定翼TOPCON无人机航拍所得高空间分辨率正射影像和数字高程模型(digital elevation model,DEM)。影像空间分辨率约为5 cm,DEM空间分辨率为0.12 m。图9(a)为常规建筑物检测结果。为了方便看到局部的检测效果,放大显示红色矩形区域如图9(b)所示。
(a) 建筑物检测结果 (b) 局部情况
图9 建筑物提取
Fig.9 Building extraction
从图9(b)中可以发现,检测结果存在很多锯齿状噪声,且与屋顶实际边缘位置有一定的距离。主要由于在实际生产中高空间分辨率正射影像的质量并不总是很理想,尤其是高大建筑物,往往存在很多墙面信息环绕在建筑物屋顶周围,故采用常规边缘特征检测到的建筑物轮廓效果较差,适用性不强。图10为分别采用边缘特征检测和本文方法的提取结果。

(a) 边缘特征检测(b) 本文提取结果
图10 实验2
Fig.10 Experiment 2
图10(a)中利用“canny”边缘算子进行边缘检测,2个阈值分别为0.012 5和0.031 3,检测结果中建筑物边缘多存在2~3条直线线段,且多处边缘线不连续,难以区分哪一条为真正的屋顶边缘线。图10(b)为本文方法的最终提取结果,对比图9(a)和图10(b),可看出精确提取后的轮廓线较为平直,去除了绝大部分锯齿状变形,与其实际位置更为接近,完整度为0.987,正确率达0.947。
2.3 实验3
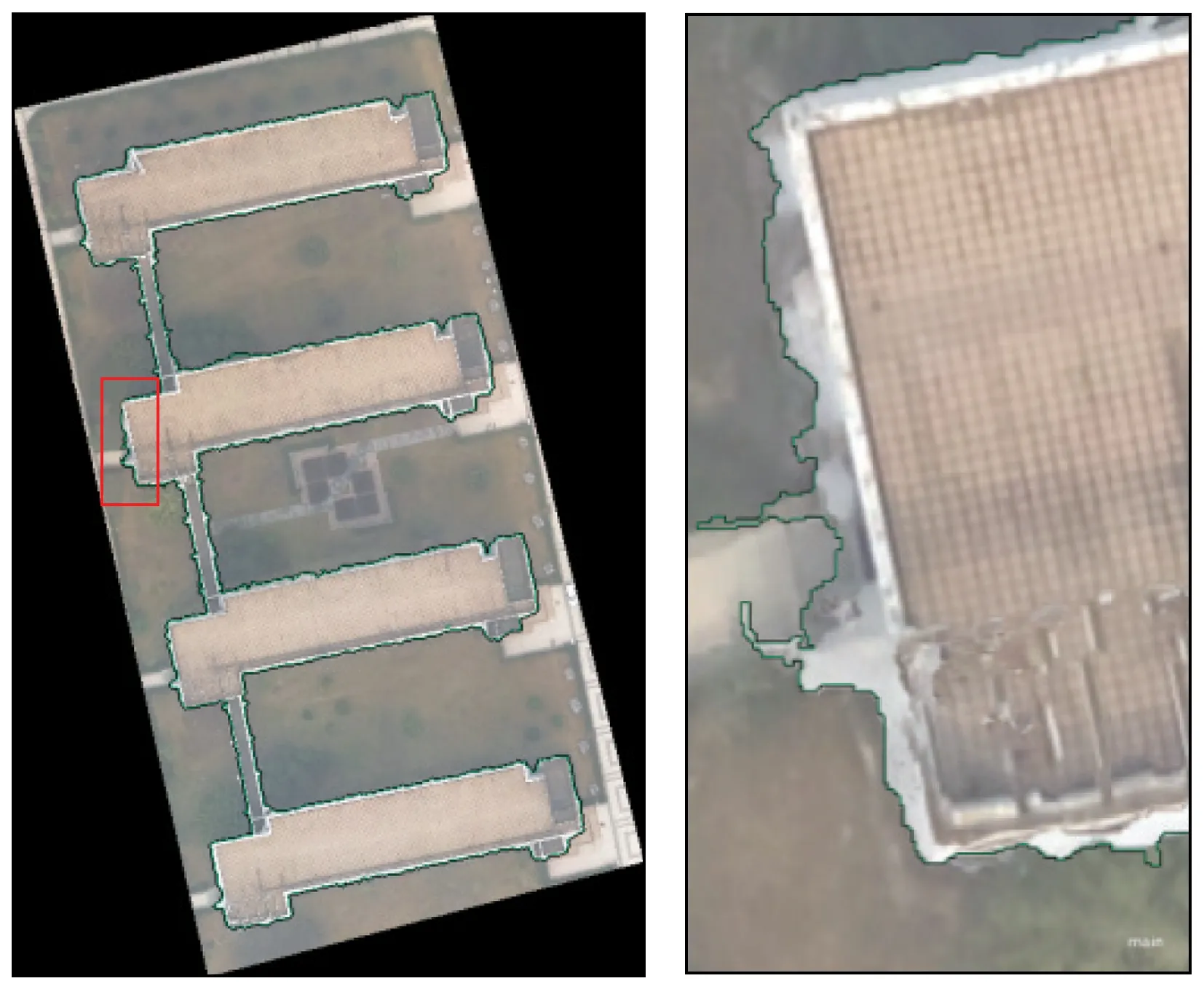
实验3为复杂场景区,空间分辨率为0.15 m,平均点数为4.5个/m2。该实验区建筑物特点: ①建筑物的形状很复杂,大小不一,高度各不相同,甚至同一栋建筑物各部分高度也不同; ②建筑物非常密集,不同的建筑物墙面紧紧相连; ③由建筑物和高大植被形成的阴影区域,建筑物信息和非建筑物信息难以区分; ④部分建筑物被遮挡; ⑤部分汽车与建筑物之间的大小、高度和距离均非常接近; ⑥建筑物部分区域与地面之间的纹理、高程均非常接近,这些问题均大大增加了建筑物轮廓信息提取的难度。通过与文献[19]的提取方法进行对比分析,证明本文方法的提取效果,提取结果如图11所示。

(a) 实验区影像 (b) 参考数据(c) 文献[19]结果(d) 本文方法结果
图11 实验3
Fig.11 Experiment 3
对比图11(c)和(d)可以看出,本文方法与文献[19]方法的提取结果相差不大,2种方法都能适应复杂场景中建筑物轮廓信息的提取。从定量分析角度,文献[19]提取结果的完整度为0.927,正确率仅0.887,精度偏低; 本文方法提取结果的完整度为0.951,正确率达0.944,精度得到明显提升,且文献[19]的方法存在较多建筑物没有检测完全,对回字形结构的建筑物并不适用。
基于从简单到复杂的建筑物影像,通过上述3组实验,证明了本文提取方法的有效性,提取的建筑物轮廓保留了绝大部分细节特征,与参考数据差异较小,形状相似,具有较高的精度,完整度和正确率平均值分别达0.973和0.948(表1)。
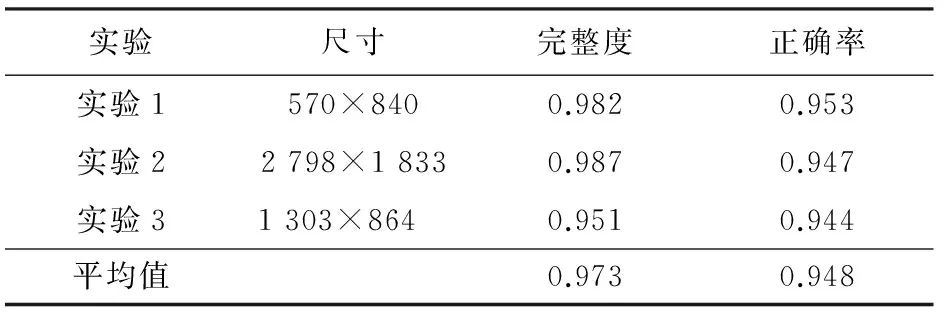
表1 实验结果精度
3 结论
通过对影像辅助下LiDAR数据进行处理,去除非建筑物信息,采用区域生长提取出建筑物斑块。在轮廓线基础上,以边缘的方向、梯度及高程等特征确定链的权重,构建并解算能量函数,实现建筑物轮廓信息的精确提取。得到的结论如下:
1)本文方法能够结合影像和LiDAR数据的特点,充分利用两者的优势,实现建筑物的可靠提取。
2)将GCBAC算法应用于建筑物轮廓信息的精确提取,不限定建筑物的类型,适用性广泛。
3)本文方法也可用于无人机数据中建筑物轮廓信息的提取,提取精度较高,完整度和正确率平均值均达0.94以上。
本文尚存在一些不足,提取的建筑物外轮廓并不规则,需要规则化后处理才可投入应用。目前正在尝试如何将建筑物的形状先验信息引入能量函数模型,以实现大范围规则化的建筑物轮廓信息提取。
[1] 程亮,龚健雅.LiDAR辅助下利用超高分辨率影像提取建筑物轮廓方法[J].测绘学报,2008,37(3):391-393,399. Cheng L,Gong J Y.Building boundary extraction using very high resolution images and LiDAR[J].Acta Geodaetica et Cartographica Sinica,2008,37(3):391-393,399.
[2] 沈蔚,李京,陈云浩,等.基于LIDAR数据的建筑轮廓线提取及规则化算法研究[J].遥感学报,2008,12(5):692-698. Shen W,Li J,Chen Y H,et al.Algorithms study of building boundary extraction and normalization based on LIDAR data[J].Journal of Remote Sensing,2008,12(5):692-698.
[3] 周绍光,孙金彦,凡莉,等.高分辨率遥感影像的建筑物轮廓信息提取方法[J].国土资源遥感,2015,27(3):52-58.doi:10.6046/gtzyyg.2015.03.10. Zhou S G,Sun J Y,Fan L,et al.Extraction of building contour from high resolution images[J].Remote Sensing for Land and Resource,2015,27(3):52-58.doi:10.6046/gtzyyg.2015.03.10.
[4] 崔建军,隋立春,徐花芝,等.基于边缘检测算法的LiDAR数据建筑物提取[J].测绘科学技术学报,2008,25(2):98-100. Cui J J,Sui L C,Xu H Z,et al.Building extraction from LiDAR data based on edge detection[J].Journal of Geomatics Science and Technology,2008,25(2):98-100.
[5] 李云帆,龚威平,林俞先,等.LiDAR点云与影像相结合的建筑物轮廓信息提取[J].国土资源遥感,2014,26(2):54-59.doi:10.6046/gtzyyg.2014.02.10. Li Y F,Gong W P,Lin Y L,et al.The extraction of building boundaries based on LiDAR point cloud data and imageries[J].Remote Sensing for Land and Resource,2014,26(2):54-59.doi:10.6046/gtzyyg.2014.02.10.
[6] Chen L,Teo T,Shao Y,et al.Fusion of LIDAR data and optical imagery for building modeling[J].International Archives of Photogrammetry and Remote Sensing,2004,35(B4):732-737.
[7] 谭衢霖,王今飞.结合高分辨率多光谱影像和LiDAR数据提取城区建筑[J].应用基础与工程科学学报,2011,19(5):741-748. Tan Q L,Wang J F.Building extraction using high resolution multi-spectral image and LiDAR data[J].Journal of Basic Science and Engineering,2011,19(5):741-748.
[8] Turker M,Koc-San D.Building extraction from high-resolution optical spaceborne images using the integration of support vector machine(SVM) classification,hough transformation and perceptual grouping[J].International Journal of Applied Earth Observation and Geoinformation,2015,34:58-69.
[9] 杨洋,张永生,马一薇,等.基于LIDAR数据的建筑物轮廓提取[J].测绘科学,2010,35(3):203-205. Yang Y,Zhang Y S,Ma Y W,et al.The study on building boundary extraction based on LiDAR data[J].Science of Surveying and Mapping,2010,35(3):203-205.
[10]陈仁喜.图像缺损信息的修复方法研究[D].北京:中国科学院研究生院,2006. Chen R C.Research on Methods for Repairing Missing Information on Images[D].Beijing:University of Chinese Academy of Sciences,2006.
[11]Criminisi A,Perez P,Toyama K.Region filling and object removal by exemplar-based image inpainting[J].IEEE Transactions on Image Processing,2004,13(9):1200-1212.
[12]Chen Q,Gong P,Baldocchi D,et al.Filtering airborne laser scanning data with morphological methods[J].Photogrammetric Engineering and Remote Sensing,2007,73(2):175-185.
[13]Xu N,Bansal R,Ahuja N.Object segmentation using graph cuts based active contours[C]//Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Madison,WI,USA:IEEE,2003:2.
[14]Xu N,Ahuja N,Bansal R.Object segmentation using graph cuts based active contours[J].Computer Vision and Image Understanding,2007,107(3):210-224.
[15]Tao W B.Iterative narrowband-based graph cuts optimization for geodesic active contours with region forces(GACWRF)[J].IEEE Transactions on Image Processing,2012,21(1):284-296.
[16]Zheng Q,Dong E Q,Cao Z L,et al.Modified localized graph cuts based active contour model for local segmentation with surrounding nearby clutter and intensity inhomogeneity[J].Signal Processing,2013,93(4):961-966.
[17]Dong E Q,Zheng Q,Sun W Y,et al.Constrained multiplicative graph cuts based active contour model for magnetic resonance brain image series segmentation[J].Signal Processing,2014,104:59-69.
[18]Boykov Y,Kolmogorov V.An experimental comparison of min-cut/max- flow algorithms for energy minimization in vision[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(9):1124-1137.
[19]Awrangjeb M,Fraser C S.Rule-based segmentation of LIDAR point cloud for automatic extraction of building roof planes[J].ISPRS Annals of Photogrammetry and Remote Sensing and Spatial Information Sciences,2013,II-3/W3:1-6.
(责任编辑: 陈理)
Building boundary extraction using LiDAR data and images
WANG Chunlin1,2, SUN Jinyan1,2, ZHOU Shaoguang3, QIAN Haiming1,2, HUANG Zuoji1,2
(1.Anhui&HuaiheRiverInstituteofHydraulicResearch,Hefei230088,China; 2.AnhuiDayuHydraulicConservancyEngineeringTechnologyCo.,Ltd,Hefei230088,China; 3.SchoolofEarthScienceandEngineering,HohaiUniversity,Nanjing210098,China)
In this paper,the strategy to extract accurate building boundary from LiDAR data and images was explored. The workflow is as follows: first LiDAR data and images feature are used to extract building blobs. Then contour extraction candidate regions are established, and gradient and direction information of the candidate points are calculated to build the classic energy function. Finally energy function is computed with GCBAC algorithm, and the building boundary will be generated after the iterative optimized approach. The three experiments show that the strategy proposed in this paper is an effective method.
LiDAR; building contour; active contour model; graph cuts; images
10.6046/gtzyyg.2017.01.12
王春林,孙金彦,周绍光,等.影像辅助下LiDAR数据建筑物轮廓信息提取[J].国土资源遥感,2017,29(1):78-85.(Wang C L,Sun J Y,Zhou S G,et al.Building boundary extraction using LiDAR data and images[J].Remote Sensing for Land and Resources,2017,29(1):78-85.)
2015-09-17;
2016-04-11
王春林(1987-),男,硕士,主要从事图像处理、无人机算法等方面的研究。Email: 522101313@qq.com。
孙金彦(1988-),女,硕士,主要从事摄影测量与遥感、数字图像处理与分析研究。Email: sun_jin_yan@126.com。
TP 751.1
A
1001-070X(2017)01-0078-08
