一种新型欠驱动型并联机器人的运动学分析与仿真
2017-04-14颜文旭于振中
颜文旭,宁 金,孙 强,于振中
(江南大学电气工程及智能装备研究所,江苏无锡 214122)
一种新型欠驱动型并联机器人的运动学分析与仿真
颜文旭,宁 金,孙 强,于振中
(江南大学电气工程及智能装备研究所,江苏无锡 214122)
传统并联机器人具有自由度数量与驱动电机数量相等的问题,效率低下。为解决这些问题,提出了一种基于传统并联机器人的新型欠驱动型并联机器人。分析了欠驱动型并联机器人的结构特点与工作原理,应用空间解析几何与向量代数法,推导了机器人的运动学正解与反解。建立了运动学模型,应用MATLAB验证了运动学正解与反解的正确性,确立了最优工作空间。仿真结果表明,驱动电机数量为3时实现了机器人3或4自由度切换的功能,提高了机器人的抓取效率,具有工作空间大、运行速度快、定位精度高、制造成本低等特点,具有广泛的工业应用前景。
机器人控制;欠驱动;自由度切换;运动学模型;仿真
随着中国经济的高速发展、劳动力成本的不断提高,以物联网加模式(信息化、自动化)为特征的新型制造业正在兴起。研制满足新型制造业自动化流水线的机械手已然成为一种趋势。传统工业机器人分为串联机器人与并联机器人两种。相对于串联机器人,并联机器人[1-3]具有刚度大、负载能力强、精度高、自重负荷比小、动力性能好等一系列优点,因此并联机器人在工业上得到广泛应用。自STEWART[4]发明六自由度并联机构,至HUNT[5]提出将其机构应用至机器人,新型并联机器人结构的研究得到国内外众多学者的青睐。中国燕山大学黄真教授[6]较早地对并联机器人结构模型进行了研究,随后清华大学、哈尔滨工业大学、东北大学[7]、浙江大学等单位也陆续研制了结构各异的并联机器人。并联机器人主要应用于医疗、工业机器人以及并联机床等领域[8-10]。其中应用最成功的领域是工业机器人与并联机床。
机器人的运动学是机器人动力学、机器人控制和规划的基础,在机器人研究中占有重要地位。并联机器人的反向运动学相对简单而正向运动学[11]较为复杂。正向运动学分析分为数值法与解析法两种。典型的数值法有非线性方程组消元搜索法[12]、神经网络算法等。哈尔滨工业大学的赵杰等[13]运用空间几何学及矢量代数法求解并联机器人的正解,但数值法计算速度较慢并且不能保证获得全部解。相对于数值法,解析法可获得所有可能解,但推导过程复杂。国内外学者求解正解的解析解都是基于特殊构型到一般构型的思路。北京邮电大学梁崇高教授等[14]对Stewart三角平台型6腿SPS并联机构作了复杂的求解;黄真教授等[15]则利用非线性方程组进行求解,但这些方法较为费时或对计算机配置较高而难以实现。因此,有研究人员提出增设多个传感器的方法以降低求解的难度并加快求解速度,但这样却增加了结构设计的难度,也带来误差问题。
本文根据机器人机构与运动原理,运用空间解析几何与向量代数法对运动学正解与反解进行求解,并应用MATLAB对运动学正解与反解进行验证[16-18],确立机器人最优工作空间,以实现驱动机构的自由度(驱动电机数量)为3,而运动自由度数量为3或4。
1 运动学分析
1.1 机构描述
欠驱动型并联机器人由静平台、旋转驱动机构以及二自由度并联机构组成,如图1所示。
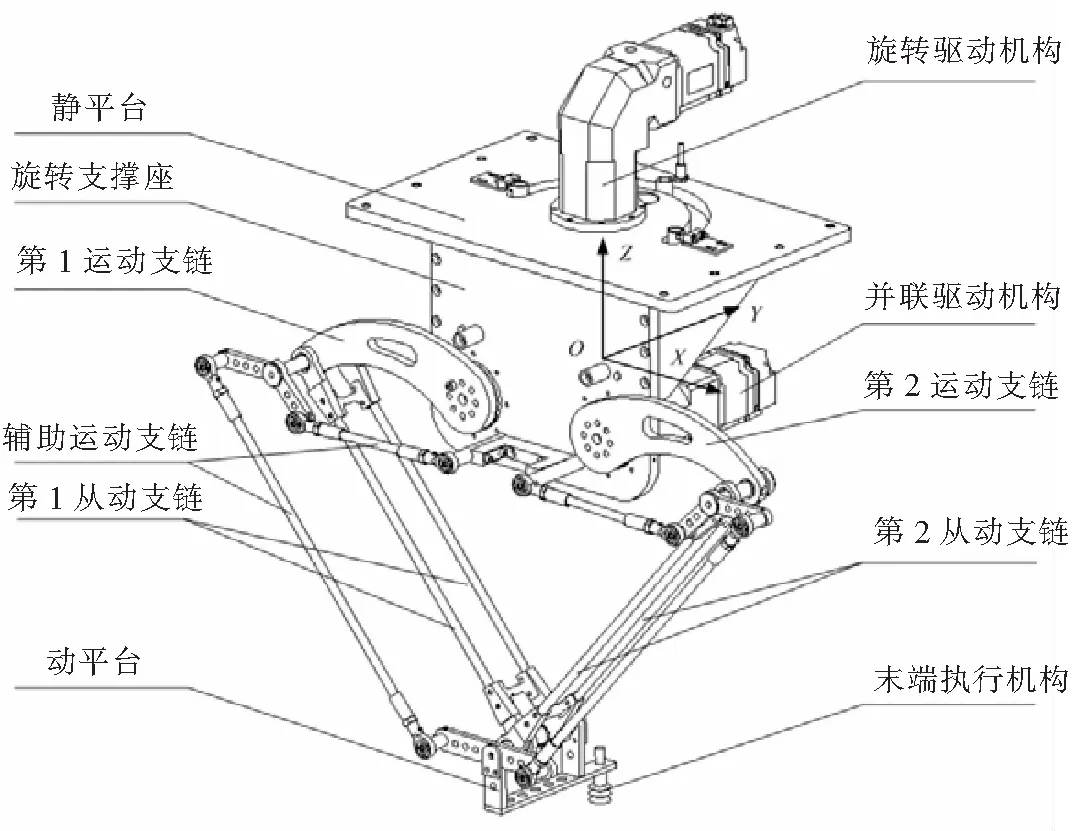
图1 欠驱动型并联机器人结构简图Fig.1 Structural diagram of the underactuated parallel robot
旋转驱动机构由驱动电机以及弯头减速机组成,并安置于静平台上,驱动二自由度并联机构。二自由度并联机构包括并联驱动机构、旋转支撑座、第1运动支链、第1从动支链、第2运动支链、第2从动支链、辅助运动支链、动平台、末端执行机构。
第1运动支链与第2运动支链处于同一平面内,同时,并联地连接旋转支撑座和动平台。并联驱动机构分别驱动第1运动支链与第2运动支链,以带动动平台运动。两侧引入辅助运动支链形成转动副,保证末端执行机构的中心轴始终垂直于静平台,提高抓取精度。
旋转驱动机构的输出轴与末端执行机构的中心轴平行,并且,旋转驱动机构和末端执行机构构成的平面与第1运动支链和第2运动支链所处的平面平行。当第1运动支链与第2运动支链对称时,旋转驱动机构的输出轴与末端执行机构的中心轴在同一直线上,即可实现旋转自由度。
1.2 机构运动原理
当旋转驱动机构驱动二自由度并联机构实现三自由度平移运动时,旋转驱动电机与并联驱动电机联动,实现(X,Y,Z)空间三自由度平移运动,符合传统并联机构驱动电机数量与机器人自由度数量相等的原理。当旋转驱动机构驱动二自由度并联机构实现四自由度运动时,二自由度并联机构驱动电机联动,实现(X,Y)平面二自由度运动,随后旋转驱动机构驱动电机单独运动并绕Z轴旋转运动,实现第四自由度运动。由于机器人机构的特殊性,使得机器人做三或四自由度运动,因此属于欠驱动型机构。

图2 机器人支链简图Fig.2 Diagram of robot branched chain
1.3 (X,Y,Z)空间运动学分析
1.3.1 坐标系建立
全局坐标系O-XYZ设在两运动支链轴所在平面与旋转驱动机构输出轴的交点O处,如图2所示,X轴指向第2运动支链,Z轴沿旋转驱动机构的输出轴向上,且O-XYZ坐标系遵循右手守则。图2中杆长分别为l0,l1,l2,3轴角度分别为θ1,θ2,θ3,C点坐标为(XC,YC,ZC)。为保证五边形ABCDE为凸边行,对角度取值进行限制,θ2,θ3取较大的值,同时-90°<θ1≤90°。
1.3.2 (X,Y,Z)空间运动学正解分析
由图2,已知l0,l1,l2,θ1,θ2,θ3可得:
(1)
由式(1)得:
(2)
其中:
P=(2l0+l1sinθ2+l1sinθ3)/cosθ1;Q=l1(cosθ3-cosθ2);
R=l0l1(sinθ3-sinθ2);S=-P/Q;T=-R/Q;a=1+S2+tan2θ1;
b=2l0cosθ1+2l0sinθ1tanθ1+2ST+2Sl1cosθ3;

经解析几何计算出XC,代入式(2)可确定YC,ZC的值。取ZC<0为正解的合理解。
1.3.3 (X,Y,Z)空间运动学反解分析
已知l0,l1,l2,XC,YC,ZC,由图2与式(1)可知:
(3)
其中:
b2=-4l1XCcosθ1-4l1YCsinθ1+4l0l1;
b3=4l1XCcosθ1+4l1YCsinθ1+4l0l1;

由式(3)可确定θ1,θ2,θ3的值,取θ2>0,θ3>0为逆解的合理解。
1.4 自由度切换原理
欠驱动型并联机器人在实施三或四自由度切换功能时,首先对被抓取对象抓取目标点位置与抓取起始点位置进行比较,选择三或四自由度模式。若被抓取对象抓取目标点位置方向与抓取起始点位置方向处于同一直线上并且两者相同,则执行三自由度平移运动抓取。若两者位置方向存在差异,则执行四自由度运动抓取,即三自由度平移运动与一个旋转轴自由度。在实施四自由度运动抓取过程中,其三自由度运动学分析与上述运动学分析相同,其第4旋转自由度θA与偏角θ1相等。由于四自由度运动中的第4自由度是单独运动,因此,三自由度平移运动相比于四自由度运动具有更高的抓取效率。两者之间的切换,间接地提高了抓取效率。
2 仿 真
2.1 运动学验证算例
欠驱动型并联机器人结构参数如下:l0=80 mm,l1=180 mm,l2=400 mm,θ2,θ3范围为0°~120°。由于(X,Y,Z)空间运动学与四自由度空间运动学存在映射关系,因此只对(X,Y,Z)空间运动学正解、逆解进行验证。其正解、逆解验证数据分别如表1和表2所示。

表1 正解验证数据
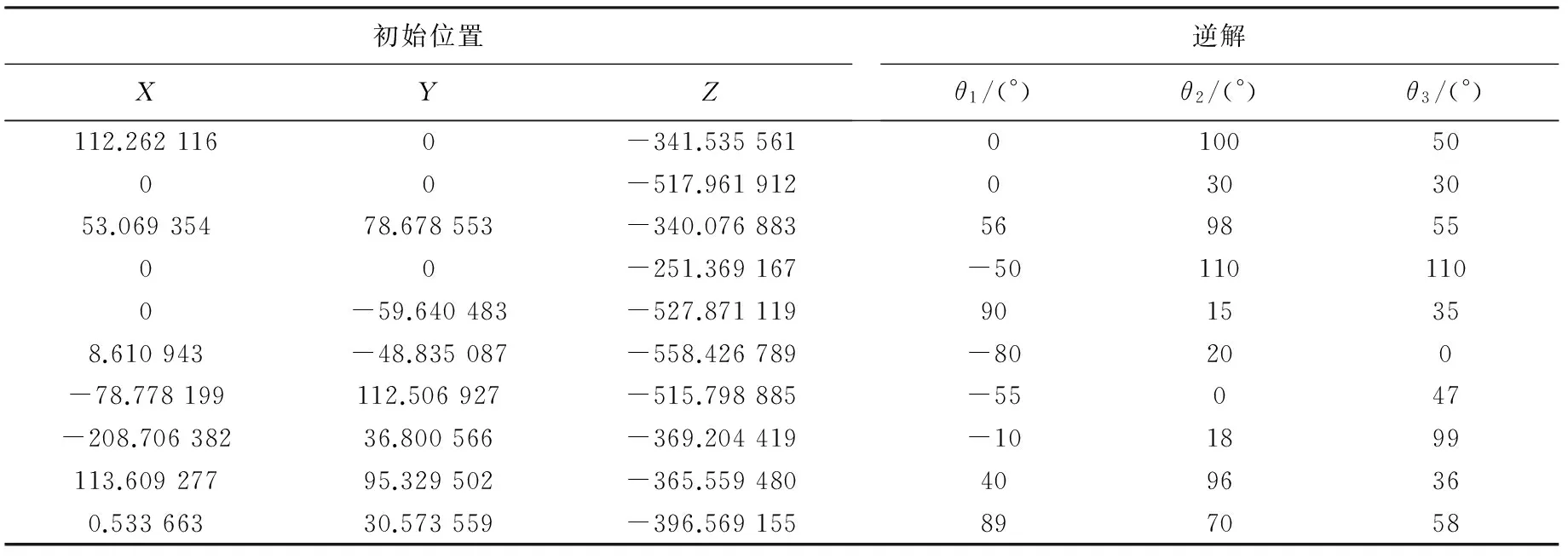
表2 逆解验证数据
由表1、表2可知,欠驱动型并联机器人运动学分析合理,其理论运行误差几乎为零,运行稳定且精度高。
2.2 最优工作空间确立
根据上节的运动学算法以及结构参数,使用MATLAB仿真软件对欠驱动并联机器人工作空间进行仿真分析。仿真结果如图3—图5所示。
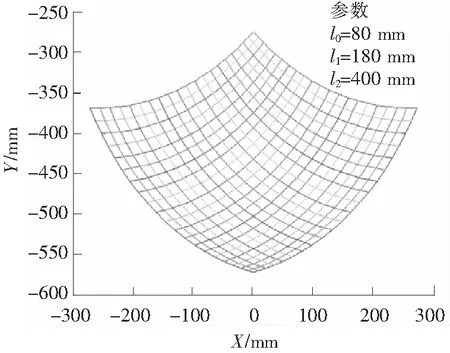
图3 二自由度并联机构平面工作空间Fig.3 Working space of 2-DOF parallel mechanism
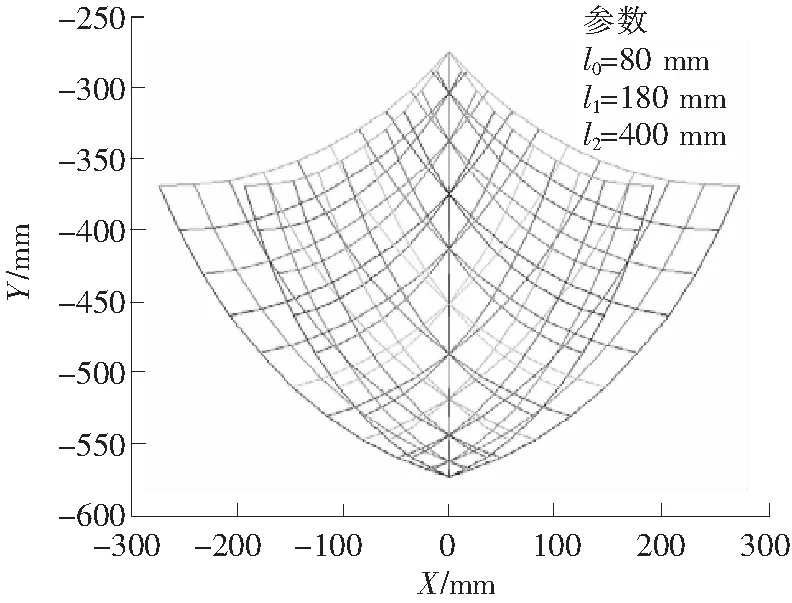
图4 欠驱动型并联机器人工作空间侧视图Fig.4 Side view of working space for the under actuated parallel robot
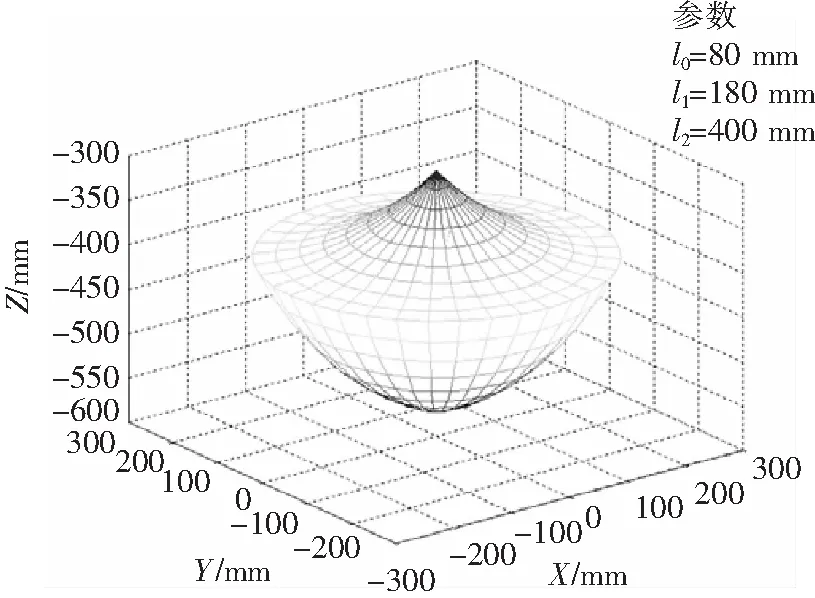
图5 欠驱动型并联机器人三维工作空间Fig.5 3D working space of the under actuated parallel robot
由图3、图4可知,与传统并联机器人相比较,欠驱动型并联机器人工作空间有所改进,其工作空间较大。由图3—图5可确定欠驱动型并联机器人最优工作空间[19-20]。图中工作曲线光滑平稳,表明该机器人运行稳定,精度高。
3 结 语
1)新型欠驱动型并联机器人的驱动自由度数量为3,可实现三或四自由度功能的切换。本文分析了其结构特点与工作原理,利用空间解析几何与向量代数法分析了空间运动学正解与反解。空间运动学分析与四自由度运动学分析存在映射关系,为机器人三或四自由度切换提供了理论基础。建立了运动学模型,利用MATLAB验证了运动学分析的正确性,确立了最优工作空间,为设计者提供了一定的参考。实验结果表明:与传统并联机器人相比,该新型并联机器人具有制造成本低、运动空间大、抓取精度高等优点。
2)在实现四自由度运动过程中,由于存在切换动作,其工作效率可能与四自由度驱动机构相比稍低。另外,需要根据实际应用的反馈,进一步优化控制算法,调整机器人运动与抓取速度,从而提高工作效率。
3)在工业实际应用中,如果配置视觉系统,该欠驱动型并联机器人可以完成物料的分拣、繁杂装配等作业,这是未来的研究方向。
/References:
[1] 董海薇, 李平康. 国内并联机器人研究现状及未来进展[J]. 自动化博览, 2005, 22(4):86-88. DONG Haiwei, LI Pingkang. The current situation and development of parallel robot in China[J]. Automation Panorama,2005, 22(4): 86-88.
[2] 黄昔光, 何广平, 谭晓兰,等. 并联机器人机构研究现状分析[J]. 北方工业大学学报, 2009, 21(3):25-31. HUANG Xiguang, HE Guangping, TAN Xiaolan, et al. An introduction to parallel robot[J]. Journal of North China University of Technology,2009, 21(3): 25-31.
[3] 李晓冬. 并联机器人的特点及应用分析[J]. 黑龙江科技信息, 2008(10):36-37.
[4] STEWART D. A platform with six degrees of freedom:A new form of mechanical linkage which enables a platform to move simultaneo-usly in all six degrees of freedom developed by Elliott-Automation[J]. Aircraft Engineering and Aerospace Technology,1966,38(4):30-35.
[5] HUNT K H. Structural kinematics of in-parallel-actuated robot-arms[J]. Journal of Mechanisms Transmissions & Automation in Design, 1983, 105(4):705-712.
[6] 黄真. 并联机器人及其机构学理论[J]. 燕山大学学报, 1998,22(1):13-27. HUANG Zhen. The parallel robot manipulator and its mechanism theory[J]. Journal of Yanshan University, 1998,22(1):13-27.
[7] 杨强, 孙志礼, 闫明,等. 一种新型五自由度并联机构运动学分析与仿真[J]. 东北大学学报(自然科学版), 2008, 29(1):117-120. YANG Qiang, SUN Zhili, YAN Ming, et al. Kinematics and simulation of a new five-DOF parallel mechanism[J]. Journal of North eastern University(Natural Science), 2008, 29(1):117-120.
[8] 余晓流, 岑豫皖, 潘紫微,等. 并联机器人的理论及应用研究[J]. 安徽工业大学学报(自然科学版), 2003, 20(4):290-294. YU Xiaoliu, CEN Yuwan, PAN Ziwei,et al. Research on the theory and the application of parallel mechanism robot[J]. Journal of Anhui University of Technology (Natural Science), 2003, 20(4):290-294.
[9] 马晓丽, 陈艾华, 张雪莲,等. 并联机器人机构的创新与应用研究进展[J]. 机床与液压, 2007, 35(2):235-237. MA Xiaoli, CHEN Aihua, ZHANG Xuelian, et al. Progress in the innovation and application of parallel robot mechanism[J]. Machine Tool & Hydraulics, 2007, 35(2):235-237.
[10]温兆麟, 陈新, 敖银辉,等. 并联机构应用的领域及其构型研究[J]. 机床与液压, 2005(5):6-9. WEN Zhaolin, CHEN Xin, AO Yinhui, et al. Application area and structure study of parallel mechanism[J]. Machine Tool & Hydraulics, 2005(5):6-9.
[11]梁香宁. Delta机器人运动学建模及仿真[D]. 太原:太原理工大学, 2008. LIANG Xiangning. Kinematics Modeling and Simulation of Delta Robot[D]. Taiyuan: Taiyuan University of Technology, 2008.
[12]LIU K, FITZGERALD J M, LEWIS F L. Kinematic analysis of a Stewart platform manipulator[J]. IEEE Transactions on Industrial Electronics, 1993, 40(2):282-293.
[13]赵杰, 朱延河, 蔡鹤皋. Delta型并联机器人运动学正解几何解法[J]. 哈尔滨工业大学学报, 2003, 35(1):25-27. ZHAO Jie, ZHU Yanhe, CAI Hegao. Geometric solution for direct kinematics of delta parallel robot[J]. Journal of Harbin Institute of Technology, 2003, 35(1):25-27.
[14]梁崇高, 荣辉. 一种Stewart平台型机械手位移正解[J]. 机械工程学报, 1991,27(2):26-30. LIANG Chonggao, RONG Hui. The forward displacement solution to a Stewart platform type manipulator[J]. Chinese Journal of Mechanical Engineering, 1991,27(2):26-30.
[15]黄真, 孔宪文. 6-SPS并联机器人机构运动分析[J]. 东北重型机械学院学报, 1992,16(4):283-289. HUANG Zhen, KONG Xianwen. Kinematics analysis of 6-SPS parallel mechanism[J].Journal of Northeast Heavy Machinery Institute, 1992,16(4):283-289.
[16]梁师望. MATLAB在并联机器人运动仿真中的应用[J]. 机电一体化, 2000, 6(6):56-57. LIANG Shiwang. Application of MATLAB in kinematics simulation of parallel robot[J]. Mechatronics, 2000, 6(6):56-57.
[17]宁淑荣, 郭希娟. MATLAB 在并联机器人机构仿真中的应用[J]. 系统仿真学报, 2004, 16(10):2273-2275. NING Shurong, GUO Xijuan. The application of MATLAB in simulation of the parallel mechanism[J]. Journal of System Simulation, 2004, 16(10):2273-2275.
[18]张志涌. MATLAB教程[M]. 北京:北京航空航天大学出版社, 2001.
[19]杨宏兵. 6-SPS并联机器人运动学及工作空间的仿真研究[D]. 合肥:合肥工业大学, 2004. YANG Hongbing. Simulation Research of the Kinematics and Workspace of 6-SPS Parallel Robot[D]. Hefei:Hefei University of Technology, 2004.
[20]程伟, 郭钢, 唐红品,等. 一种新型6-PTS并联机器人工作空间分析[J]. 机械制造与自动化, 2011, 40(1):138-140. CHENG Wei, GUO Gang, TANG Hongpin, et al. Workspace analysis of novel 6-PTS parallel robot[J].Machine Building & Automation, 2011, 40(1):138-140.
Kinematics analysis and simulation of a new underactuated parallel robot
YAN Wenxu, NING Jin, SUN Qiang, YU Zhenzhong
(Institute of Electrical Engineering and Intelligent Equipment, Jiangnan University, Wuxi, Jiangsu 214122, China)
The number of degrees of freedom is equal to the number of the traditional robot driving motors, which causes defects such as low efficiency. To overcome that problem, based on the traditional parallel robot, a new underactuated parallel robot is presented. The structure characteristics and working principles of the underactuated parallel robot are analyzed. The forward and inverse solutions are derived by way of space analytic geometry and vector algebra. The kinematics model is established, and MATLAB is implied to verify the accuracy of forward and inverse solutions and identify the optimal work space. The simulation results show that the robot can realize the function of robot switch with three or four degrees of freedom when the number of driving motors is three, improving the efficiency of robot grasping, with the characteristics of large working space, high speed operation, high positioning accuracy, low manufacturing cost and so on, and it will have a wide range of industrial applications.
robot control; underactuated; switching of DOF; kinematics model; simulation
1008-1542(2017)02-0190-06
10.7535/hbkd.2017yx02014
2016-12-03;
2016-12-23;责任编辑:冯 民
江苏省普通高校研究生实践创新计划项目(SJLX15_0570)
颜文旭(1971—),男,福建仙游人,副教授,主要从事电力电子技术及智能控制、电力系统及其自动化、机电一体化及运动控制系统等方面的研究和开发工作。
E-mail:ywx03@163.com
TH122
A
颜文旭,宁 金,孙 强,等.一种新型欠驱动型并联机器人的运动学分析与仿真[J].河北科技大学学报,2017,38(2):190-195.
YAN Wenxu,NING Jin,SUN Qiang,et al.Kinematics analysis and simulation of a new underactuated parallel robot[J].Journal of Hebei University of Science and Technology,2017,38(2):190-195.
