红枣输送运动及其图像采集的可靠性分析
2017-04-12代洪春党晓辉胡耀华
代洪春 梁 宁 党晓辉 胡耀华
(西北农林科技大学机械与电子工程学院,陕西 杨陵 712100)
红枣输送运动及其图像采集的可靠性分析
代洪春1梁 宁1党晓辉2胡耀华1
(西北农林科技大学机械与电子工程学院,陕西 杨陵 712100)
滚子式输送机构在机器视觉分级系统中应用最为广泛。通过对滚子输送机构中的红枣进行受力分析和运动分析,获取了红枣从刚接触摩擦带由静止加速到与滚子接触点处线速度相同时水平前进距离的数学模型;获取了红枣加速转动过程结束后,定距离间隔采集红枣图像时红枣转动角度的数学模型。以新疆骏枣为例,通过确定合适的传输速度、相机安装位置和相机对枣的图像采集次数,能够采集到红枣整个表面信息,从而保证图像采集的可靠性。
红枣;滚子;运动分析;数学模型;图像采集
红枣输送机构是红枣机器视觉自动分选机的核心部件,为了保证机器视觉系统能完整采集到红枣的表面图像信息,必须确保红枣输送机构在高速输送红枣的同时,将红枣的完整表面都呈现给摄像机[1]。为此,海内外学者通过调研研制了滚子式[2-4]、无底果杯式[5]和水果自动定位式[6]等输送机构,其中滚子式输送机构实际应用最为普遍。Girowe T G等[2]和徐惠荣等[7]证明了水果在输送机构上运动的转角与滚子的形状以及水果本身大小有关,在假设水果与滚子间无相对滑动情况下,因为水果本身大小的差别,导致其在滚子上的翻转滚动角速度可能会有差异,从而使在机器视觉系统持续采集多幅图像的时间间隔内,大小不同的水果旋转的角度不同,继而造成有些水果表面信息被重复采集或漏采集。Yang Tao[8]提出了只保存小水果在摄像机视场内翻转一圈采集到图像,解决了水果表面信息重复采集的问题,但无法解决水果表面信息漏采集问题。而Leemans等[9]和Bennedsen等[10]则提出将要分选的水果先按照大小不同进行预分选,然后按照水果大小调整滚子输送机构的运送速度,从而保证同样大小的水果在机器视觉范围内可以近似旋转一周。但是当大小不同水果混合分选时,仍然无法解决水果表面信息重复采集和漏采集的问题。魏新华等[11]从改变滚子的形状方向进行研究,提出了一种滚子的滚身母线方程,从而使该输送机构可以同时输送大小差异较大的水果,并且可以保证大小不同的水果都可以以近似相同的角速度均匀翻转。李烜等[12]通过对柑橘在滚子传输翻转过程中的运动分析,并且通过分析柑橘在滚子上翻转打滑情况,总结出转角相对误差变化率公式,从而保证了柑橘的全部表面信息可以呈现在摄像机视场内。本研究拟在红枣与滚子间有相对滑动的情况下,对红枣在滚子传输翻转过程进行运动分析,并考虑传输链速度、相机对枣的图像采集次数、枣尺寸等因素,确保机器视觉系统能最大概率地获取红枣的完整表面图像。
1 工作原理
滚子式红枣输送机构见图1。整个红枣输送机构由一条输送链带动,将若干滚轴平行等间距地安装在输送链上,在滚轴上则套装相应的滚子并保证滚子可以绕滚轴自由转动。在机器视觉范围内,将摩擦系数较大的摩擦板或摩擦带安装在滚子正下面,并且确保其与滚子紧密接触。当驱动机构驱动输送链向前运动时,同时带动套装在滚轴的滚子一起向前运动,当滚子经过摩擦表面时,因为滚子与摩擦带的摩擦滚子开始绕滚轴向前滚动。为了确保不同大小的红枣都可以相支承在两个相邻的滚子上,将滚子设置为双锥凹形。当支撑红枣的滚子开始接触摩擦表面时,红枣即随着滚子向前输送,又在滚子与摩擦带摩擦作用下开始翻转滚动,而相机视场一般覆盖两个滚子之间距离的范围,当传输链转动一定链节,触发相机采集一次红枣图像,通过多采集几张红枣图像以保证其完整表面信息被采集到。
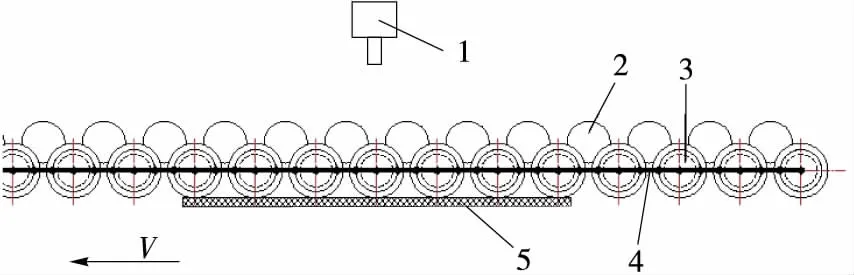
1. 照相机 2. 红枣 3. 托辊 4. 传输链 5. 摩擦带
2 红枣输送状态下的运动分析
将红枣看作均质椭球形刚体,在红枣随滚子传输状态下,其在滚子上存在两种运动形式:一种是纯滚动,即在与滚子相接触的点,红枣与滚子有相同的相对线速度;另外一种运动是在与滚子接触点处,红枣在滚子上打滑,造成红枣滚动速度损失。当支撑红枣的滚子开始接触摩擦带表面时,红枣随着滚子向前输送,同时在滚子与摩擦带摩擦作用下开始由静止翻转滚动,此时红枣在滚子上打滑。当红枣与滚子接触点的切线速度与相应滚子上接触点切线速度相同时,且不考虑空气等对红枣阻碍作用,红枣的运动可视为纯滚动。
2.1 红枣的受力分析
取椭球形红枣为研究对象,简化为平面力系处理,图2(a)为红枣在滚子间的受力分析,图2(b)为红枣与滚子的接触位置。假设红枣与两滚子一直保持4点稳定接触,即支反力的方向、作用点到红枣中心线的水平距离在整个翻转过程中不随时间变化,红枣在翻转过程中则不会产生质心加速度。
红枣受力平衡方程为
(1)
(2)
红枣相对质心动量
Jα=(F1+F2)Rx,
(3)
(4)
式中:
m——红枣质量,kg;
R——红枣横半径,m;
N1、N2——滚子支反力,N;
F1、F2——红枣表面滑动摩擦力,打滑时Fi=fNi,N;
f——滑动摩擦因数;

1. 红枣 2. 滚子 3. 摩擦带
θ——红枣截面中心和滚子接触面中心连线与两滚子水平轴中心连线的夹角,(°);
J——红枣的转动惯量,kg·m2;
Rx——红枣与滚子接触点处的红枣轨迹圆半径,m;
r0——滚子最小半径,m;
r1——滚子最大半径,m;
rx——红枣与滚子接触点处的滚子轨迹圆半径,m;
a——两个相邻滚子轴之间的间距,m。
联立式(1)~(3),可得
(5)

2.2 红枣的运动分析
假设红枣与滚子间的动摩擦因数是一定的(在一般运动中,速度对动摩擦因数的影响可忽略不计),在滚子间的红枣由静止以角加速度α加速到红枣与滚子接触点的相对线速度为0,这个过程中红枣的角速度以及转角是一个与时间有关的函数,其运动学方程为
(6)
ω=ω0+αt,
(7)
式中:
φ——红枣加速翻转角度,rad;
t——红枣加速翻转时,s;
ω0——初始角度为0,rad/s。
又滚子作纯滚动的角速度ωr由链条速度v线速度差产生,即
ωrr1=v。
(8)
红枣与滚子接触点处线速度与角速度关系为
vx=ωrrx。
(9)
则有
(10)
式中:
ωr——滚子角速度,rad/s;
v——链条传输速度,m/s;
vx——红枣与滚子接触点处滚子的线速度,m/s。
当红枣与滚子接触点处红枣的线速度达到vx时,红枣在滚子间作纯滚动,在之后过程中红枣的角速度是一个与时间无关的函数,其运动学方程
ωRRx=ωrrx=vx,
(11)
由式(5)、(7)可得到红枣由静止加速到与滚子接触点处红枣的线速度vx的过程中,红枣的角速度是随时间变化而变化的,并且和红枣与滚子接触点处的红枣轨迹圆半径Rx、滚子轨迹圆半径rx有关。若在红枣加速过程中,相机以一定时间间隔采集多张图像,则单个红枣在每个时间间隔内的转角都不一样,而对大量分级的红枣来说,红枣的尺寸对每个时间间隔内的转角也有影响,所以在加速过程中采集红枣图像对红枣转角的分析非常复杂。而由式(8)可知,红枣在加速转动完后的过程是纯滚动的,角速度与滚子轨迹圆半径rx成正比,与红枣轨迹圆半径Rx成反比。所以对红枣进行图像采集的位置可以放在红枣加速转动后的过程,而红枣在整个加速转动过程中,红枣水平前进的距离可由式(7)、(9)联合得
(12)
红枣从刚接触摩擦带由静止加速到与滚子接触点处红枣的线速度达到vx,水平前进距离S后,相机采集第一张红枣图像,而位于链轮两侧的光电传感器计数的传输传动的链节数达到两个相邻滚子轴之间的间距a的相应链节数时,触发相机采集图像。若相机视场在传输链运动方向上的范围是na时,在相机采集第一张红枣图像到采集第i张图像时,红枣前进距离为(i-1)a,运行时间为(i-1)a/v,红枣转动的角度为

(13)
3 验证实验
在红枣机器视觉自动分选机设计中,以新疆骏枣为分级对象,其最小红枣横半径为9 mm,最大横半径为20 mm。保证两个相邻滚子轴之间能放下一个枣的位置,其间距a要大于2倍的红枣最大横半径,且根据有关输送链节距系列标准,选择4节08A链节为两个相邻滚子轴之间的间距,即a=50.8 mm。由式(8)可知,红枣角速度与滚子轨迹圆半径rx成正比,与红枣轨迹圆半径Rx成反比,考虑到相机视场有限,滚子半径略大于红枣最大横半径时,红枣有较大的角速度,使得红枣在相机视场内翻转一周而水平前进的距离较短,令r0=18 mm,r1=20 mm。查阅资料红枣与PC塑料滚子之间的滑动摩擦系数f为0.1~0.2。在加速过程中采集红枣图像对红枣转角的分析非常复杂,所以先求出红枣加速转动过程中前进的距离S的最大值,由式(14)可知,S与红枣横半径R和红枣轨迹圆半径Rx比值的平方成正比、与滚子轨迹圆半径rx和滚子最大半径r1比值成正比、与sinθ成正比、与v2成正比。由图2(b)可知,rx介于r0=18 mm与r1=20 mm之间,Rx介于最小红枣横半径9 mm与最大横半径20 mm之间,且滚子轨迹圆半径rx和滚子最大半径r1比值成正比小于等于1,红枣横半径R和红枣轨迹圆半径Rx比值小于等于2.22;由式(5)知,在rx与Rx取最大值时,sinθ有最大值为0.772。取f=0.1,g=9.8 m/s2则Smax1= 3.137v2
链传输速度受限于图像处理系统处理一种图像的速度,避免图像数据内存因处理不及时而导致溢出,需要在触发处理第2个枣的图像之前,前面一个枣的图像需要处理完毕。以每秒平均处理6张图像速度来算,处理一种图像的时间t=1/6=0.166 667 s,而相邻托辊上红枣距离约为50.4 mm。所以链的传输速度不大于v=50.4/0.166 667=0.302 4 m/s。即上述的红枣机器视觉自动分选机设计中,红枣加速转动过程中前进的距离S的最大值为0.287 m。当红枣从刚接触摩擦带由静止加速转动前进0.287 m后,红枣作纯滚动,相机采集第一张红枣图像。若相机视场在传输链运动方向上的范围是na时,在相机采集第一张红枣图像到采集第i张图像时,红枣前进距离为(i-1)a,运行时间为(i-1)a/v,红枣转动的角度可由式(13)求得,其中rx可近似为r0。一般采集2张图像,当枣横半径范围在9~20 mm,很难保证能采集到大多数枣的360°图像。
由表1可知,当采集2张红枣图像时红枣横径在18~28 mm时,由于红枣横径小转速快造成采集区域重叠不能采集到完整的红枣表面信息。红枣横径在30~40 mm时,由于红枣横径大转速慢造成红枣没有旋转1周,不能采集到完整的红枣表面信息,因此采集2张红枣照片不能满足要求。
对不同横径的每个红枣采集3张图像,红枣转动的角度可由式(13)求得,其中rx可近似为r0,结果见表2。
由表2可知,横径小于20 mm的红枣,由于转速快造成采集区重叠,不能采集到红枣整个表面信息;横径在20~40 mm的红枣,当采集3张红枣图像时,红枣整个表面信息可以被采集到,满足了研究的要求。
4 结论
(1) 通过对滚子输送机构中红枣进行受力分析和运动分析,获取了红枣由静止加速到做纯滚动运动时水平前进距离的数学模型;获取了红枣加速转动过程结束后,定距离间隔采集红枣图像时红枣转动角度的数学模型。
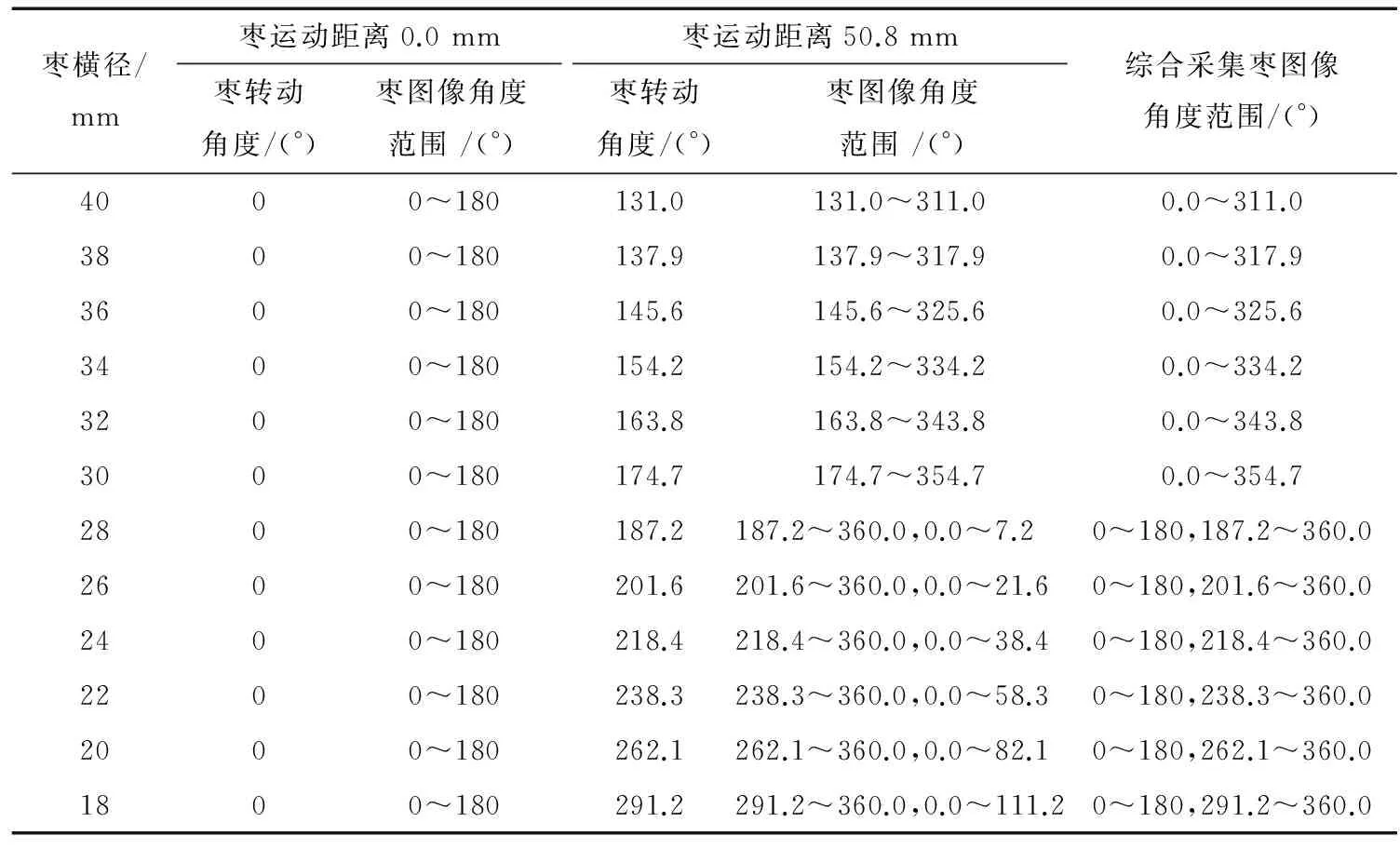
表1 2张红枣图像角度采集范围Table 1 Angle collection range of two jujube images
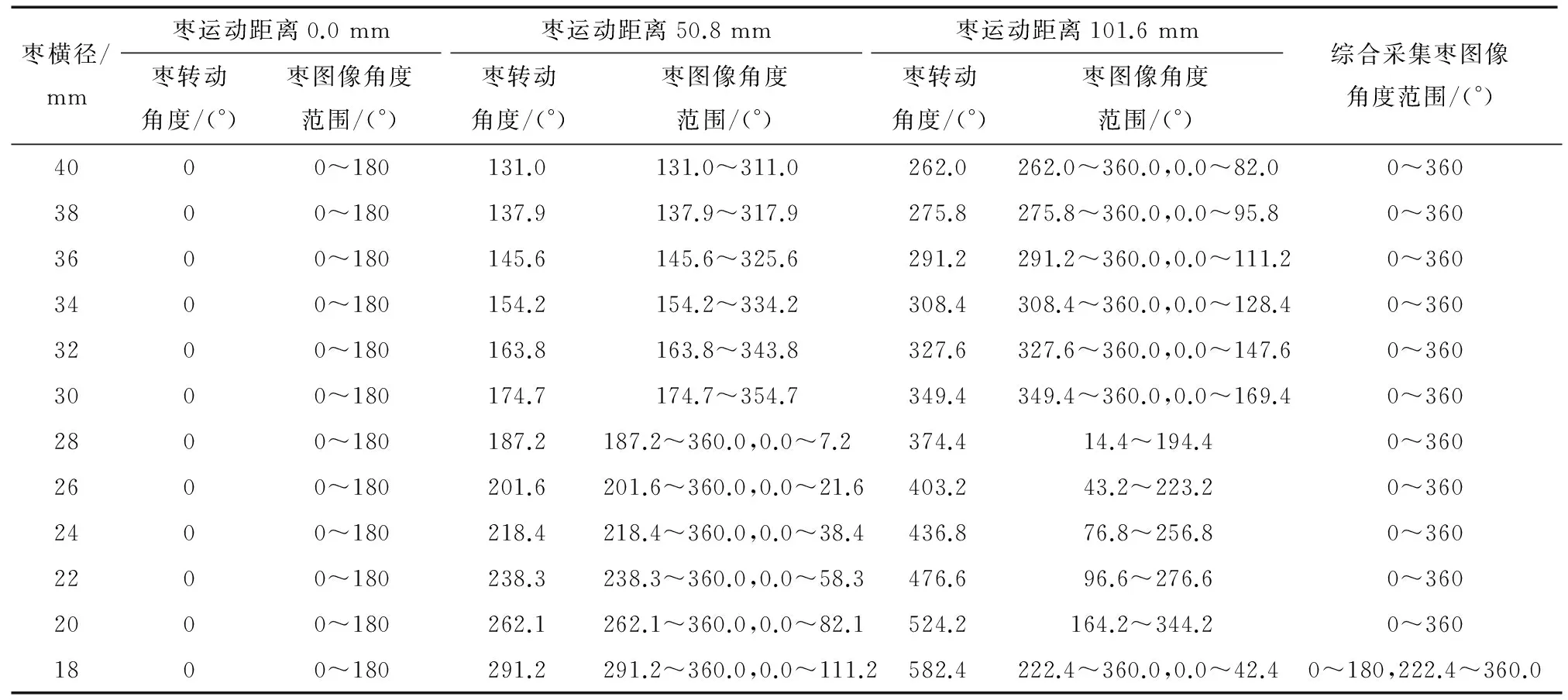
表2 3张红枣图像角度采集范围Table 2 Angle collection range of three jujube images
(2) 红枣从刚接触摩擦带由静止加速到与滚子接触点处线速度相同的过程中,红枣的角速度是随时间变化而变化的,并且和红枣与滚子接触点处的红枣轨迹圆半径Rx、滚子轨迹圆半径rx有关。通过对红枣的受力分析和运动分析,获取了红枣在整个加速转动过程中水平前进的距离的数学模型,并求其最大值,在红枣水平前进距离S最大值之后控制相机开始采集红枣图像。
(3) 红枣加速转动过程结束后,红枣在滚子间作纯滚动,红枣的角速度是一个与时间和连传输速度无关的函数。在分级对象是新疆骏枣,滚子最小半径和最大半径分别为18 mm和20 mm,两个相邻滚子轴之间的间距a为50.8 mm的机器视觉分级机中,且当定距离采集红枣3张图像时,综合采集枣图像角度范围能覆盖绝大数红枣轴向360°图像,以这种方法可以准确采集到红枣表面全部信息。
[1] 应义斌, 饶秀勤, 黄永林. 群体水果动态图像的获取方法研究[J]. 浙江大学学报: 农业与生命科学版, 2004, 30(2): 147-152.
[2] CROWE T G, DELWICHE M J. Real-time defect detection in fruit——part I: design concepts and development of prototype hardware[J]. Transactions of the ASAE, 1996, 39(6): 2 299-2 308.
[3] 应义斌, 徐惠荣, 蒋焕煜, 等. 能实现准球形水果自动成单列输送并均匀翻转的装置: 中国, 02136379.X[P]. 2003-02-05.
[4] 应义斌, 徐惠荣, 叶昱程. 分级机用双锥式滚子水果输送翻转装置: 中国, 02266030.5[P]. 2002-08-03.
[5] 李庆中, 汪懋华. 基于计算机视觉的苹果自动分级系统硬件开发[J]. 农业机械学报, 2000, 31(2): 56-59.
[6] THROOP J A, ANESHANSLEY D J, ANGER W C, et al. Quality evaluation of apples based on surface defects: development of an automated inspection system [J]. Postharvest Biology and Technology, 2005, 36(3): 281-290.
[7] 徐惠荣, 应义斌, 盖玲. 双锥式滚子水果输送翻转机构的研究[J]. 农业机械学报, 2003, 34(6): 100-103.
[8] YANG Tao. Method and apparatus for sorting objects by color including stable color transformation: US, 5533628[P].1996-07-09.
[9] LEEMANS V, DESTAIN M F. A rea-l time grading method of apples based on features extracted from defects[J]. Journal of Food Engineering, 2004, 61(1): 83-89.
[10] BENNEDSEN B S, PETERSON D L, AMY Tabb. Identifying defects in images of rotating apples[J]. Computers and Electronics in Agriculture, 2005, 48(2): 92-102.
[11] 魏新华, 周杏鹏, 李法德, 等. 水果机器视觉分选机滚子式传输翻转机构优化设计[J]. 农业机械学报, 2007(9): 98-102.
[12] 李烜, 李凤军, 韩东海. 柑橘分级检测中翻转机构的力学分析[J]. 农业机械学报, 2006, 37(1): 94-96.
[13] 赵新闻, 杨兵初, 黄生祥. 椭球体转动惯量的计算[J]. 物理与工程, 2007, 17(2): 28-29.
Jujube motion analysis and its reliability analysis of image acquisition
DAI Hong-chun1LIANGNing1DANGXiao-hui2HUYao-hua1
(CollegeofMechanicalandElectronicEngineering,NorthwestA&FUniversity,Yangling,Shaanxi712100,China)
Roller conveyor turning mechanism is the most widely used in machine vision grader system. Through force analysis and motion analysis of jujube in it , the horizontal distance mathematical model of jujube from just contact friction was gotten by static acceleration to the same as linear velocity at roller contact point and the rotation angle mathematical model when grabbing jujube images in a certain distance after the accelerating rotation process. Studying the Chinese date of Sinkiang, by determining the appropriate transport speed, position of the camera, and the camera image acquisition frequency of jujube, all the surface information can be gotten, which can ensure the reliability of image acquisition.
red jujube; roller; motion analysis; mathematical model; image acquisition
杨凌示范区科技计划项目(编号:2015GY-04);国家自然科学基金资助项目(编号:31671965)
代洪春,男,西北农林科技大学在读硕士研究生。
胡耀华(1973-),女,西北农林科技大学教授,博士。 E-mail: huyaohua@nwsuaf.edu.cn
2016—10—21
10.13652/j.issn.1003-5788.2017.02.020
