高速列车牵引传动系统协同仿真研究及软件设计
2017-04-09葛兴来张晓华
葛兴来,张晓华
(西南交通大学 磁浮技术与磁浮列车教育部重点实验室, 四川 成都 610031)
高铁走出去战略促进了中国高速铁路蓬勃发展,同时也对高速列车性能和安全提出了更高的要求。建立1套以高速列车为核心的多学科协同仿真系统,在未来高速铁路的发展中将具有重要的工程应用价值。牵引传动系统协同仿真是高速列车耦合大系统仿真平台的重要组成部分,这就需要搭建更真实的牵引传动系统动态仿真模型,以及设计牵引传动系统与仿真平台间的协同仿真。
文献[1]基于dSPACE实时仿真器建立牵引传动系统纯数字实时综合仿真系统,并利用MATLAB软件建立牵引传动系统控制器模型和被控对象模型;文献[2]以6轴电力机车传动系统为例,分别采用硬件回路(HIL)和快速控制原型(RCP)2种半实物仿真方式,对牵引传动系统进行建模和分析。但二者都需要昂贵的硬件设备支持。文献[3]采用纯软件设计的方式,结合SIMULINK和VC++软件的优点,建立了CRH2和CRH3型动车组的牵引传动系统模型,可以在脱离MATLAB软件的环境下运行,但仅可进行牵引传动系统的独立仿真,而且没有考虑过分相、中间直流侧电压抬升以及与列车运行控制模块间的协同仿真,并且在高速列车全速域均采用异步空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM),这与实际不相符[4-7]。文献[8]研究了可在线计算作用时间的同步SVPWM算法,但文中只给出了同步4脉冲和同步2脉冲2种开关序列。另外,有关基于纯软件的高速列车牵引传动系统全速域、多学科协同仿真研究,目前也未见报道。
本文针对高速列车牵引传动系统与运行控制系统的协同仿真问题,从牵引传动系统的动态仿真建模和协同仿真软件设计两方面展开研究。研究的同步7脉冲和同步5脉冲调制算法作为中速区的同步SVPWM算法,以提高列车中速区SVPWM算法的谐波性能;基于SIMULINK软件搭建高速列车牵引传动系统动态仿真模型,通过Real-Time Workshop将模型转换为C/C++代码,然后基于VC++设计可单步运行的用于高速列车耦合大系统仿真平台牵引传动系统与运行控制系统的协同仿真软件,并验证本文研究及设计的协同仿真软件的有效性。
1 高速列车牵引传动系统动态仿真
1.1 牵引传动系统
CRH2型高速动车组三电平交—直—交型牵引传动系统如图1所示,其中牵引控制单元(TCU)是牵引控制系统的核心,用于接收司控台发送的牵引/制动指令,控制牵引变流器和牵引电机跟踪指令运行。变流器的控制分为整流和逆变两部分,网侧单相三电平整流器输出稳定的中间直流电压、网侧单位功率因数,其调制与控制算法已有详尽研究[9],在此不做赘述;虽电机侧转子磁场定向控制或直接转矩控制已有成熟研究[10-11],但有关三电平逆变器—牵引电机的全速域SVPWM算法研究较少或不足[12-13]。因此,对三电平逆变器—牵引电机全速域SVPWM算法做深入研究。
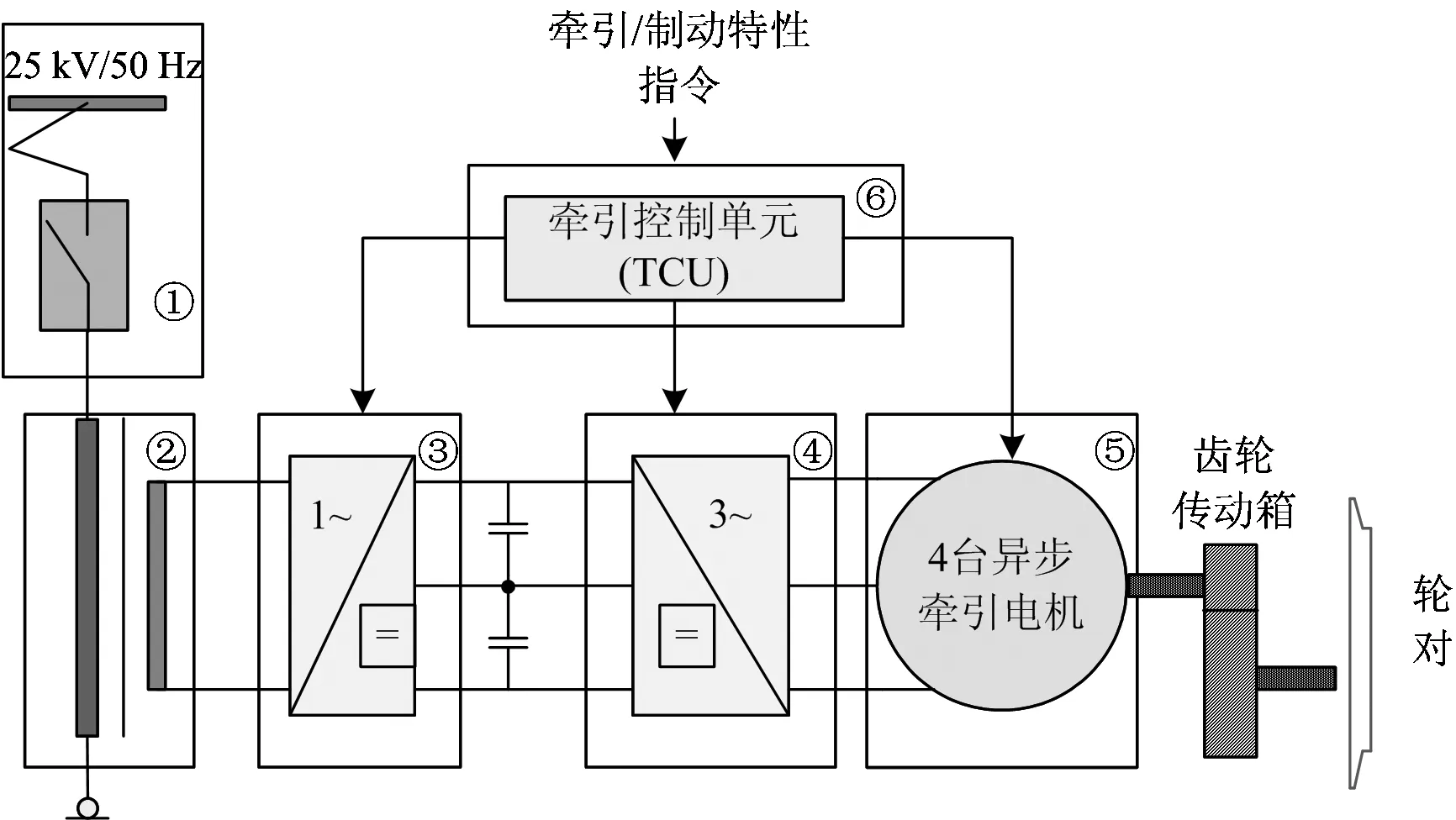
①—主断路器;②—牵引变压器;③—四象限脉冲整流器;④—三电平逆变器;⑤—牵引电机;⑥—TCU
1.2 三电平逆变器工作原理
CRH2型高速动车组采用二极管钳位型三电平NPC(Neutral-Point-Clamped)逆变器(简称三电平逆变器),其主电路拓扑结构如图2所示。图中:Ud为直流侧电压;C1,C2分别为直流侧上、下支撑电容;Ta1—Ta4,Tb1—Tb4,Tc1—Tc4为三相桥臂功率开关器件。

图2 三电平NPC逆变器主电路结构
根据三电平逆变器的主电路拓扑结构,定义三相桥臂状态函数Si(i=a,b,c)为
(1)
以A相桥臂为例,定义输出端对三相负载中性点的桥臂相电压为uan,则:Si=P时,uan=Ud/2;Si=O时,uan=0;Si=N时,uan=-Ud/2。故三电平逆变器共有33=27种开关状态,对应的基本电压矢量分布如图3示,图中:Uref为目标电压矢量;对空间电压矢量平面按每隔60°为1个大扇区,共划分出6个大扇区;且在第1扇区内再划分出6个小扇区。

图3 三电平逆变器基本电压矢量分布图
1.3 三电平逆变器—牵引电机全速域SVPWM算法
针对牵引传动系统低开关频率的特点,牵引电机额定频率以下区段分为异步调制区和分段同步调制区。
1.3.1异步SVPWM算法
传统对称七段式SVPWM算法(异步SVPWM算法)的调制模式是根据目标电压矢量Uref的位置选择临近冗余小矢量对,具有更优的谐波性能和中点电位平衡能力[12]。
矢量选择:以第1扇区为例,各小扇区首发矢量均为正小矢量(POO或PPO),保证扇区切换时无矢量突变。小扇区5和6的矢量时序与传统的对称七段式无异,分别为POO→PON→PNN→ONN→PNN→PON→POO,PPO→PPN→PON→OON→PON→PPN→PPO。其余小扇区的电压矢量时序如图4示。图中:Tx,Ty,Tz分别为对应电压矢量Ux,Uy和Uz的作用时间。
合成时间计算:在1个开关周期Ts内,按最近三矢量合成原则,将电压矢量Ux,Uy和Uz合成目标电压矢量Uref;根据伏秒平衡关系,各电压矢量作用时间Tx,Ty和Tz满足下式。
UrefTs=UxTx+UyTy+UzTz
其中,
Ts=Tx+Ty+Tz
(2)

图4 电压矢量时序图
定义调制度m=πUref/(2Ud),以图4所示小扇区电压矢量时序图为例,小扇区1和2,及小扇区3和4的电压矢量作用时间分别见式(3)、式(4)。
(3)
(4)
式中:θ为目标电压矢量Uref的相角。
1.3.2同步SVPWM算法

同步调制的设计步骤与异步调制基本一致,不同的是同步调制以角度作为自变量进行开关角的求解,则式(2)的伏秒平衡关系可等价为
Urefθs=Uxθx+Uyθy+Uzθz
其中,
θs=θx+θy+θz=ωsTs
(5)
式中:θs为电压采样角度;θx,θy,θz分别为对应电压矢量的作用角度;ωs为牵引电机基波角频率,rad·s-1。

表1 满足同步和对称条件的桥臂状态函数
根据最近三矢量合成原则,同步调制区零矢量电压已经不参与矢量合成,余下的小矢量、中矢量、大矢量电压分别用Usv,Umv和Ubv表示。根据不同的目标电压采样次数SN和采样位置,可设计不同的开关序列。以图3所示第1扇区为例,当SN=2时,同步调制采样电压矢量的分布如图5所示,电压采样角度θs=30°,电压矢量U1的采样位置为θ1=15°,剩余11个采样电压矢量U2—U12的采样位置基于对称性逆时针依次分布。
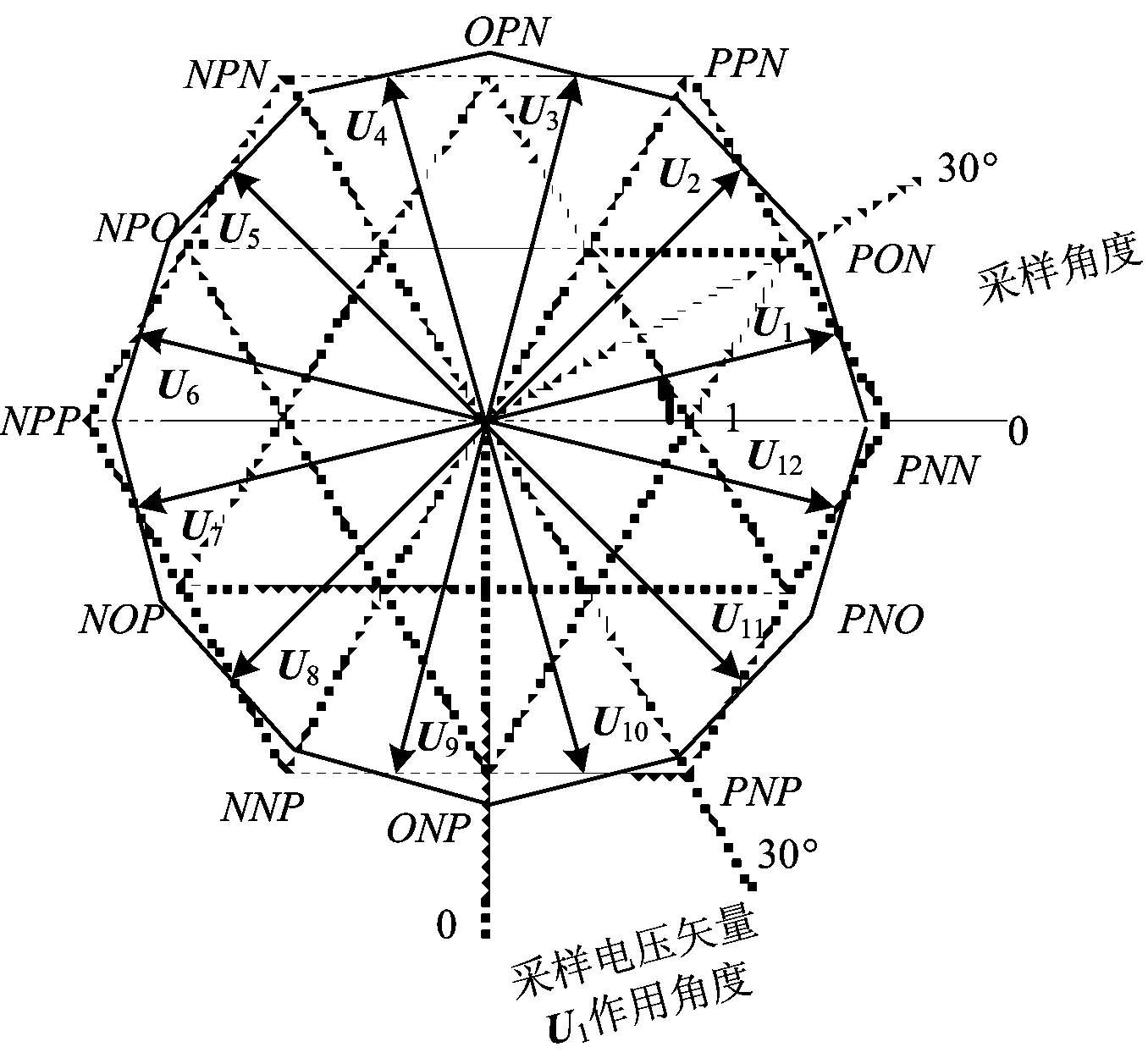
图5 同步调制采样电压矢量分布图
同步多脉冲调制的关键在于设计合理的开关矢量序列。以图5为例,在第1扇区共有2个采样电压矢量,选用矢量序列Usv→Ubv→Umv在0°~30°范围内对采样电压矢量U1进行合成,选用矢量序列Umv→Ubv→Usv在30°~60°范围内对采样电压矢量U2进行合成。由式(5)分别得到电压矢量U1和U2的作用角度,见式(6)、式(7)。
(6)
(7)
根据各大扇区的对称性,由式(8)可推导出其他5个大扇区的矢量开关序列。
(8)
故在设计开关序列时,只需设计第一扇区满足同步和对称性要求的开关矢量序列,则可由式(8)计算得出整个基波周期内的同步多脉冲调制开关序列。经过推导,得到同步7脉冲和同步5脉冲2种新的调制算法作为中速区的同步SVPWM算法,提高了传统全速域SVPWM算法的谐波性能。其中,同步7脉冲的相角θn=1,2,3,4,5=[6°,18°,30°,42°,54°],对应的开关序列为UsvUmvUbv→UsvUbvUmv→UsvUmvUsv→UmvUbvUsv→UbvUmvUsv,同步5脉冲的相角θn=1,2,3,4=[7.5°,22.5°,37.5°,52.5°],对应的开关序列为UsvUmvUbv→UsvUbvUmv→UmvUbvUsv→UbvUmvUsv。
1.4 牵引传动系统全速域仿真

在高速列车牵引传动系统仿真控制中,对四象限脉冲整流器采取功率解耦控制,对牵引电机采取间接转子磁场定向控制,随着列车速度的上升采取的三电平逆变器—牵引电机全速域SVPWM算法依次为异步调制→同步7脉冲→同步5脉冲→同步4脉冲→同步2脉冲→单脉冲控制。图6中虚线框所示为2个联动选择开关,其若为0,则系统进入独立仿真模式,不考虑线路数据和列车运行控制;若为1,则系统进入协同仿真模式,读取列车运行控制系统输出的牵引力、速度、阻力等实时数据,经过线性处理后作为牵引传动系统的指令信号。

图6 三电平牵引传动系统全速域仿真控制框图
牵引电机参数:额定功率为365 kW,额定电压为2 700 V,额定频率为140 Hz,定子的电阻为0.144 Ω、漏感为1.417 mH,转子的电阻为0.146 Ω、漏感为1.294 mH、互感为32.848 mH、转动惯量为362 kg·m2,极对数为2。
2 牵引传动系统协同仿真软件设计
2.1 系统需求分析
牵引传动系统仿真子系统负责模拟高速列车牵引传动系统的动态运行情况,是高速列车耦合大系统仿真平台的重要组成部分。
针对高速列车耦合大系统的协同仿真要求,牵引传动仿真子系统应该具备如下功能。
(1)模拟真实的高速列车牵引传动系统及其动态运行情况,系统包括牵引变压器、牵引变流器、牵引电机模型以及全速域调制与控制算法,满足列车较宽范围内调速性能的要求。
(2)根据牵引/制动特性曲线实现高速列车牵引/制动运行的控制,能与高速列车耦合大系统仿真平台中其他模块进行网络数据通信,并具有读写数据库的接口。
(3)具有良好的可扩展性和兼容性,友好的人机交互界面,并可集成现有型号的高速列车牵引传动系统仿真模型。
2.2 协同仿真软件设计
基于MATLAB/Simulink软件进行动车组牵引传动系统全速域动态仿真,虽然是一种被广泛认可的研究方法,但其存在可移植性差、依赖MATLAB软件运行环境、交互性较差等不足。而完全采取C/C++编程实现牵引传动系统动态仿真,开发难度较大且周期长。因此,本文采取混合编程的设计方法,将牵引传动系统仿真计算内核程序放在MATLAB/Simulink软件中实现,而将交互界面、数据可视化等上位机程序放在VC++中实现。同时,为加快牵引传动系统仿真模型的计算速度,基于C语言编写了三电平牵引传动系统全速域SVPWM算法,以及三电平四象限脉冲整流器—支撑电容—逆变器—电机等主电路模型的S-Function模块,并通过MEX函数进行调用。协同仿真软件的设计框图如图7所示。协同仿真软件通过接口数据处理程序将上位机程序和计算内核程序连通,完成仿真参数设定、消息指令传送、仿真结果数据处理与显示等基本功能,大大降低了仿真软件开发的难度和周期。

图7 协同仿真软件设计框图
设计的协同仿真软件不仅可实现牵引传动系统独立仿真[3],最主要的是还可实现牵引传动系统与高速列车运行控制系统间的协同仿真,即消息指令来自于列车运行控制模块[14-15],牵引传动系统单步计算内核程序在线实时对指令值进行跟踪,并输出实际的电机转速、电磁转矩等仿真数据。图8给出了独立仿真模式下牵引传动系统协同仿真软件的主界面,包括仿真参数配置、数据监视等功能。

图8 牵引传动系统协同仿真软件主界面
考虑到可扩展性,将三电平牵引传动系统仿真内核封装为动态链接库的形式,便于后续对不同车型、不同控制策略牵引传动系统的集成。理论上模型中所有的参数均可以预留接口,并在软件中进行参数修改和仿真调试,包括主电路参数和控制器参数。
3 仿真结果
3.1 独立仿真模式下的仿真结果
不考虑线路数据和列车运行控制,将图6所示的牵引传动系统模型按独立仿真模式配置,其中四象限脉冲整流器采取功率解耦控制,牵引电机采取内嵌全速域SVPWM的间接转子磁场定向控制。仿真得到牵引和制动工况下网侧电压和电流的波形如图9所示。由图9可见:在牵引工况下网侧电压us和网侧电流is同相位,而在制动工况下它们的相位差为180°,牵引和制动工况下的网侧功率因数均为1,验证了仿真模型及四象限脉冲整流器功率解耦控制算法的正确性,能够满足高速列车牵引传动系统的运行要求。
牵引传动系统中间直流侧电压波形如图10所示。由图10可见:中间直流侧电压可平顺地从2 600 V抬升至3 000 V,幅值波动较小,可实现中点电位的平衡;0~3 s为整流器在启动阶段经过预充电、不控整流使直流侧电压达到目标值的过程,这与高速列车的实际运行情况相一致,即先启动整流器并封锁逆变器脉冲,待到中间直流侧电压充电到目标值,再对牵引逆变器—牵引电机解除脉冲封锁。

图9 牵引和制动工况下网侧电压和电流的波形
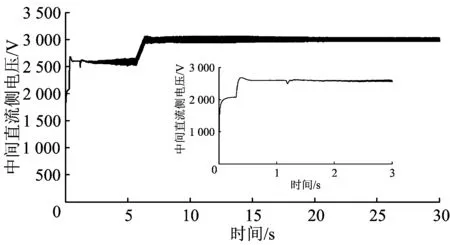
图10 中间直流侧电压波形
独立仿真模式下牵引/制动全过程的转矩—速度曲线如图11所示。由图11可见:仿真模型输出的实际转矩能够较好地跟踪给定转矩,表明采取的同步SVPWM算法可在一定程度上减小转矩脉动。

图11 转矩—速度曲线
3.2 各区段SVPWM算法切换的仿真结果
图12为各区段SVPWM算法动态切换过程中相电压、相电流和转矩的波形。图中:Sg为调制模式。由图12可见:在各调制模式下,仿真模型输出的电压波形与理论设计相一致,牵引电机的电流正弦度较高、转矩波动较小,且不同调制模式间切换冲击很小;观察不同区段的牵引电机转矩波形,可以看到在同步调制区段,转矩在1个基波周期内有6次周期性脉动,而其脉动规律与设计的开关序列直接相关,同时也与基波频率相关。
3.3 协同仿真模式仿真结果
考虑线路数据和列车运行控制,将图6所示牵引传动系统模型按协同仿真模式配置,读取列车运行控制模块输出的全程明细数据,主要有牵引力、速度、阻力、运行工况、过分相指令等关键参数,经过对数据线性处理,作为控制指令输入牵引传动系统仿真内核,进行模型的单步迭代计算。图13为仿真全程网侧电流波形。由图13可见:电流幅值反映了牵引电机的输出功率,在500 s之前牵引传动系统主要是牵引过程,即网侧电流先从0抬升至20 A左右,然后保持恒定不变,分别对应着电力牵引恒转矩、恒功率运行区。

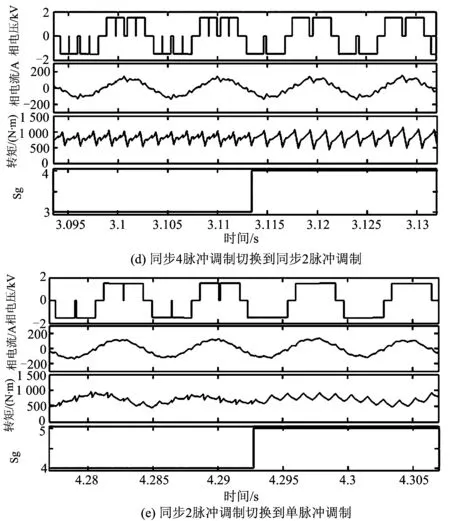
图12 牵引传动系统电机侧各区段SVPWM动态切换结果

图13 仿真全程网侧电流波形
图14为协同仿真模式下全程中间直流侧电压波形。由图14可见:中间直流侧电压的幅值基本保持恒定,不存在中点电位不平衡问题。

图14 仿真全程中间直流侧电压波形
图15为协同仿真模式下全程速度、牵引电机转矩波形。由图15可见:列车的实际速度可较准确地跟踪列车运行控制模块输出的给定速度,牵引电机转矩波形可较真实地模拟列车牵引力输出,实现了列车运行控制模块与牵引传动系统模块间的协同仿真。
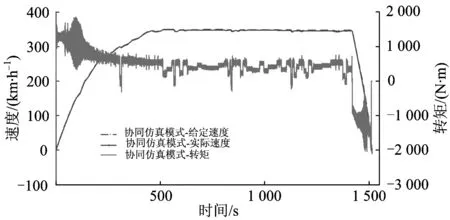
图15 仿真全程速度、转矩波形
由图13—图15可见:在协同仿真模式下,网侧电流跌落到0,中间直流侧电压存在一定的过冲,转矩和速度均存在一定程度的跌落,牵引传动系统能够正确响应列车运行控制模块发出的过分相信号,较真实地模拟了高速列车的实际运行状况。
4 结 论
(1)相对于传统全速域SVPWM算法,本文的牵引传动系统全速域SVPWM算法(异步调制—同步7脉冲—同步5脉冲—同步4脉冲—同步2脉冲—单脉冲控制)减小了低开关频率下逆变器—电机的电流谐波和转矩脉动,各区段SVPWM算法间也实现了闭环控制下的平滑切换,无明显电流、转矩冲击,输出谐波性能较好。
(2)在协同仿真模式下,列车实际速度可较好地跟踪列车运行控制模块输出的给定速度,仿真全程的网侧电流、中间直流侧电压、转矩波形能够较好地反映实际牵引传动系统的运行情况,以及响应列车运行控制系统发送的牵引/再生制动/过分相/停车指令,满足协同仿真的设计要求。
(3)相较于完全基于Simulink软件搭建的仿真软件,基于Simulink和VC++软件混合编程开发的高速列车牵引传动系统全速域协同仿真软件具有交互性好、可移植性强、可单步运行等优点,特别是可单步运行为牵引传动系统与高速列车耦合大系统仿真平台间的实时在线耦合仿真提供了条件。
[1]冯江华,王坚,李江红. 高速列车牵引传动系统综合仿真平台的分析与设计[J]. 铁道学报,2012,34(2):21-26.
(FENG Jianghua,WANG Jian,LI Jianghong. Integrated Simulation Platform of High-Speed Train Traction Drive System[J]. Journal of the China Railway Society,2012,34(2):21-26. in Chinese)
[2]丁荣军,桂卫华,陈高华. 电力机车交流传动系统的半实物实时仿真[J]. 中国铁道科学,2008,29(4):96-102.
(DING Rongjun,GUI Weihua,CHEN Gaohua. HIL Real-Time Simulation of Electric Locomotive AC Drive System[J]. China Railway Science,2008,29(4):96-102. in Chinese)
[3]LU Qinfen,WANG Bin,HUANG Xiaoyan,et al. Simulation Software for CRH2and CRH3Traction Driver Systems Based on SIMULINK and VC[J]. Journal of Zhejiang University-Science A:Applied Physics & Engineering,2011,12(12):945-949.
[4]HOLTZ J, OIKONOMOU N. Synchronous Optimal Pulsewidth Modulation and Stator Flux Trajectory Control for Medium-Voltage Drives[J]. IEEE Transactions on Industrial Applications, 2007, 43(2): 600-608.
[5]ZHANG Yongchang, ZHAO Zhengming, ZHU Jianguo. A Hybrid PWM Applied to High Power Three-Level Inverter-Fed Induction-Motor Drives[J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3409-3420.
[6]RATHORE A K, HOLTZ J, BOLLER T. Generalized Optimal Pulsewidth Modulation of Multilevel Inverters for Low-Switching-Frequency Control of Medium-Voltage High-Power Industrial AC Drives[J]. IEEE Transactions Industrial Electronics, 2013, 60(10): 4215-4224.
[7]BEIG A R,NARAYANAN G,RANGANATHAN V T. Modified SVPWM Algorithm for Three Level VSI with Synchronized and Symmetrical Waveforms[J]. IEEE Transactions on Industrial Electronics, 2007, 54(1): 486-494.
[8]葛兴来,冯晓云. 动车组牵引传动三电平逆变器SVPWM控制[J].西南交通大学学报,2008,43(5):566-572.
(GE Xinglai,FENG Xiaoyun. SVPWM Control of Three-Level Inverter for Traction Drive in EMUs[J]. Journal of Southwest Jiaotong University,2008,43(5):566-572. in Chinese)
[9]HOLMES D G,THOMAS A L.Pulse Width Modulation for Power Converters:Principles and Practice[M].New York:Wiley-IEEE Press,2003.
[10]宋昌林,胡鹏飞,李治. 用于交流传动控制器调试的实时仿真系统[J]. 西南交通大学学报,2003,38(4):414-417.
(SONG Changlin,HU Pengfei,LI Zhi. Real Time Simulation System for AC Drive Controller Test[J]. Journal of Southwest Jiaotong University,2003,38(4):414-417. in Chinese)
[11]葛兴来,宋文胜,冯晓云. 基于dSPACE的高速列车牵引传动系统[J]. 电力自动化设备,2012,32(3):18-22.
(GE Xinglai,SONG Wensheng,FENG Xiaoyun. Drive System Based on dSPACE Platform for High-Speed Train[J]. Electric Power Automation Equipment,2012,32(3):18-22. in Chinese)
[12]CELANOVIC N,BOROVEVICH D. A Comprehensive Study of Neutral-Point Voltage Balancing Problem in Three-Level Neutral-Point-Clamped Voltage Source PWM Inverters[J]. IEEE Transactions on Power Electronics, 2000, 15(2): 242-249. in Chinese)
[13]NARAYANAN G,KRISHNAMURTHY H K,ZHAO Di,et al.Advanced Bus-Clamping PWM Techniques Based on Space Vector Approach [J].IEEE Transactions on Power Electronics,2006,21(4):974-984.
[14]朱金陵,李会超,王青元,等. 列车节能控制的优化分析[J]. 中国铁道科学,2008,29(2):104-108.
(ZHU Jinling,LI Huichao,WANG Qingyuan,et al. Optimization Analysis on the Energy Saving Control for Trains[J]. China Railway Science,2008,29(2):104-108. in Chinese)
[15]王青元,冯晓云. 列车准点节能运行的控制工况最优切换研究[J]. 中国铁道科学,2016,37(2):91-98.
(WANG Qingyuan,FENG Xiaoyun. Optimal Switching for Control Conditions of Punctual and Energy Efficient Operation of Train[J]. China Railway Science,2016,37(2):91-98. in Chinese)
