多塔斜拉-悬吊协作体系合理成桥状态确定方法
2017-04-08周云岗黄晋琛
周云岗, 黄晋琛
(1.同济大学建筑设计研究院(集团)有限公司,上海 200092;2.桂林市市政工程管理处,广西 桂林 541002)
多塔斜拉-悬吊协作体系合理成桥状态确定方法
周云岗1, 黄晋琛2
(1.同济大学建筑设计研究院(集团)有限公司,上海 200092;2.桂林市市政工程管理处,广西 桂林 541002)
基于悬索桥挠度理论和斜拉桥索力优化方法,针对斜拉-悬吊协作桥的合理成桥状态,提出有限元迭代优化方法。该算法以既定的合理成桥状态为目标,首先应用悬索桥解析公式和斜拉桥刚性支承连续梁法获得初始成桥状态,接着利用零位移法通过迭代计算获得结构目标线形,再以弯曲能量最小为目标,指定各种约束条件,利用ANSYS 优化模块中的一阶优化方法进行求解,最终获得目标成桥状态,求解过程中考虑各种几何非线性效应。建立3~6塔主跨为1 400 m斜拉-悬吊协作桥的有限元模型,利用参数化设计语言(APDL)编制算法程序,进行算例分析。结果表明:悬吊部分与斜拉部分相互影响较小;主梁恒载弯矩在斜拉悬吊结合处有峰值,其它部位分布均匀;索塔以轴压为主,塔根弯矩接近为零;微调斜拉索索力,对斜拉部分主梁弯矩影响显著,对其它部分内力影响不大。
桥梁工程;多塔斜拉-悬吊协作桥;索力优化;合理成桥状态;几何非线性
0 引言
斜拉-悬吊协作桥(简称协作桥)为超静定结构,主要影响因素有恒载分布、主缆力、斜拉索索力和边界支承反力。缆索索力是确定合理成桥状态的关键因素。因此,进行索力优化研究具有重要的工程意义。
悬索桥分析方法有主要有两种:其一是非线性有限元法[1-2],其二是数值解析法[3-5]。此外,可综合两种方法计算成桥状态[6]。斜拉桥索力优化方法大致可分为4大类[7]:(1)以刚性支承连续梁为代表的指定索力状态优化方法;(2)以某种性能为代表的无约束索力优化方法;(3)以特定截面内力或节点位移为目标的有约束索力优化方法;(4)影响矩阵法。利用任一种方法,一般很难获得理想的结果[8],常常几种方法组合使用[9-10]。协作桥至今建成实例很少,相关研究成果也很匮乏,且均针对传统双塔协作桥。张哲[11]根据无应力索长和索力的概念推导了无应力索长的索力不变原理,将悬吊部分和斜拉部分分开分析,提出了自锚式双塔斜拉-悬索协作体系桥成桥索力的计算方法。朱巍志[12]利用不变形预张力的索力不变原理提出自锚式斜拉-悬索协作体系桥合理成桥状态确定的分步算法。
以3~6塔主跨为1 400 m协作桥为例,综合运用悬索桥非线性有限元法、斜拉桥刚性支承连续梁法、零位移法和弯曲能量最小法等索力优化算法,提出了三阶段优化算法,利用ANSYS 优化模块中的零阶和一阶方法进行索力优化,计算时考虑几何非线性。
1 几何非线性分析方法
斜拉-悬吊协作体系兼具悬索桥和斜拉桥的力学特点。悬索桥和斜拉桥的几何非线性影响来源于:结构的大位移效应、缆索的垂度效应和结构的初内力效应(如斜拉桥梁塔的P-Δ效应,悬索桥主缆的恒载初内力效应)。
采用ANSYS程序实现优化算法时,采用大位移刚度矩阵考虑结构的大位移效应。采用初应力刚度矩阵考虑结构的初内力效应。
缆索的垂度效应采用8段杆单元考虑[13],其中主缆在吊点位置分成多段杆单元。
2 优化方法
2.1 合理成桥状态的确定准则
协作桥合理成桥状态确定准则主要有索塔以轴压为主,塔根弯矩为零;吊索和斜拉索索力分布均匀。对于钢主梁,主梁弯矩分布均匀,以轴压为主;在恒载作用下支座无负反力,并有一定的压力储备。结构线形满足设计要求,包括主缆的垂度、IP点坐标,梁塔的线形等。
2.2 建模方法及优化目标
选择受众面广、建设难度较低的课程为资源共享课程。以安徽新华学院信息工程学院为例,选择《计算机基础》、《C/C++语言程序设计》、《计算机导论》这三门课程进行资源共享课程建设。这三门课程有共同的特点:受众面广、课时较少、内容资源丰富。这样的课程进行资源共享课程建设可以达到资源利用的最大化。
协作桥的目标线形主要指主梁、索塔线形、主缆垂度及其IP点,一般是已知的。建立有限元分析模型时,一般以目标线形确定有限元模型的节点位置,并采用相应方法计算构件的初始内力。若初始内力与目标状态下的内力一致,结构即处于理想成桥状态。可见,合理成桥状态计算就是寻找满足目标状态的一组构件初始内力。
根据合理成桥状态的确定准则和有限元分析模型特点,可得结构的优化目标为:(1)索力分布均匀;(2)主梁变形趋于零,即其弯矩呈刚性支承连续梁分布;(3)主塔变形趋于零,即其根部弯矩趋于零;(4)主缆变形趋于零。
2.3 优化算法
三阶段优化法的基本思想是首先以目标线形确定模型节点初始位置,以挠度理论和刚性支承连续梁法分别确定主缆和斜拉索初始内力,建立有限元分析模型;然后通过调整主缆和斜拉索初始内力进行结构找形;最后利用ANSYS一阶优化模块微调索力实施索力优化,计算流程如图 1所示。
算法中,首先采用预压力解决主梁轴向变形,约束条件为xb<ξ1;然后通过迭代主缆初轴力使其垂度满足设计要求,约束条件为f1<ξ2;再更新主缆其它部位初始节点坐标以消除其变形,约束条件为f2<ξ2;接着通过调整斜拉索初内力解决主梁竖向变形,约束条件为x1<ξ3。迭代计算时,边跨主缆和斜拉索内力均采用力的平衡条件计算,故边塔顶水平变形通常很小。为保证边跨支座无拉力,设置边跨压重,其值为边跨斜拉索竖向分力与相应梁段重之间差值。
找形结束后,斜拉索索力接近于理想索力,以结构弯曲能量最小为目标,微调索力,进一步优化结构内力。索力优化阶段,索力设置调整范围为Ti0·(1-ξ)≤Ti≤Ti0·(1+ξ),其中,Ti0初值为找形完成时的索力,ξ为微调系数,一般为5%~10%。
实施索力优化时,通常进行1次优化,难以获得理想结果,可重复2~3次即可获得较佳的结果。

图1 有限元迭代优化法流程图
3 优化成果
3.1 计算模型
建立主跨为1 400 m的三塔斜拉-悬吊协作桥为研究对象,验证三阶段优化算法。结构采用全漂浮体系,总体布置如图 2所示。

图2 三塔斜拉-悬吊协作体系立面布置图(单位:m)
主梁采用钢箱梁,标准断面如图3(a)所示。边塔为混凝土桥塔,中塔为钢塔,结构布置及断面如图3(b)、图3(c)所示。
ANSYS有限元分析模型如图 4所示。采用空间梁单元模拟主梁和索塔,采用只受拉多段杆单元模拟拉索,采用刚性杆联接主梁和拉索。塔、梁之间耦合横向自由度,墩、梁之间耦合平动自由度。
3.2 计算成果
基于有限单元迭代法,对ANSYS进行了二次开发,编制了确定与优化大跨径多塔斜拉-悬吊协作体系恒载索力的计算程序,对拟定的三塔斜拉-悬吊协作体系试设计方案进行恒载索力优化。
成桥状态下,应用该程序进行恒载索力优化,优化后的加劲梁挠度为-13~2 cm;边塔顶纵向位移为1.2 cm,中塔为1.9 cm;主缆垂点位移为1.8 cm。主梁恒载挠度如图 5所示。考虑到对称性,图5中仅示出左半桥。图5中位置0 m处为中塔。

图3 塔、梁典型断面图
优化前后结构内力状态如图 6所示。由图6可知,在成桥作用下,主梁弯矩分布均匀且最大值仅为36 MN,呈刚性支承连续梁状态;斜拉索和吊索的轴力分布较均匀,斜拉索应力为350~450 MPa,吊索应力为200 MPa左右;边塔根弯曲应力为0.1 MPa;中塔根弯曲应力为0.6 MPa。对比三阶段结构内力可得,斜拉索内力变化很小,主梁及边塔弯矩显著减小,中塔弯矩变大,但仍然很小,基本可忽略。

图4 三塔斜拉-悬吊协作体系计算模型
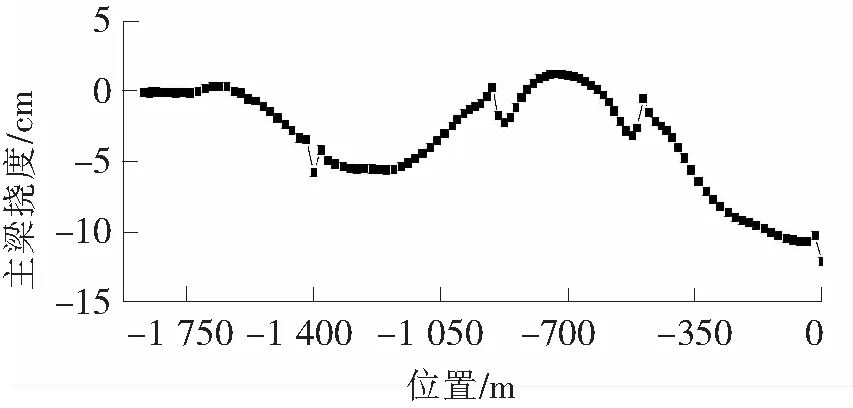
图5 三塔斜拉-悬吊协作桥主梁恒载位移图
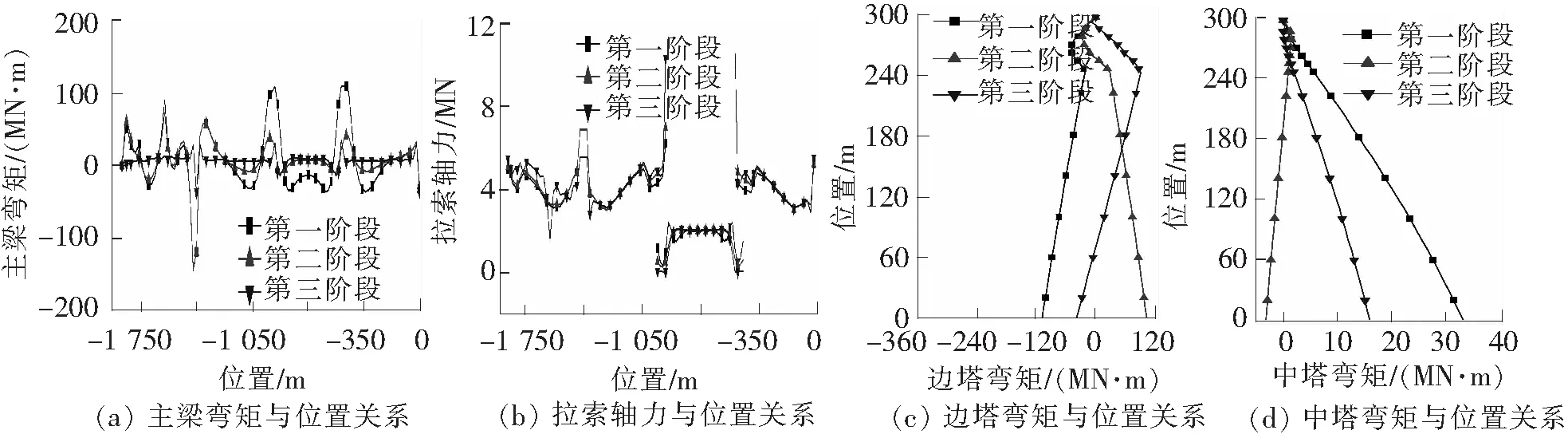
图6 三塔斜拉-悬吊协作桥恒载内力图
表1、表2给出三塔斜拉-悬吊协作体系主梁和索塔三阶段优化结果。索力优化后,结构受力状态得到很大改善,结构内力及线形满足既定的合理成桥状态指标。

表1 主梁优化结果对比
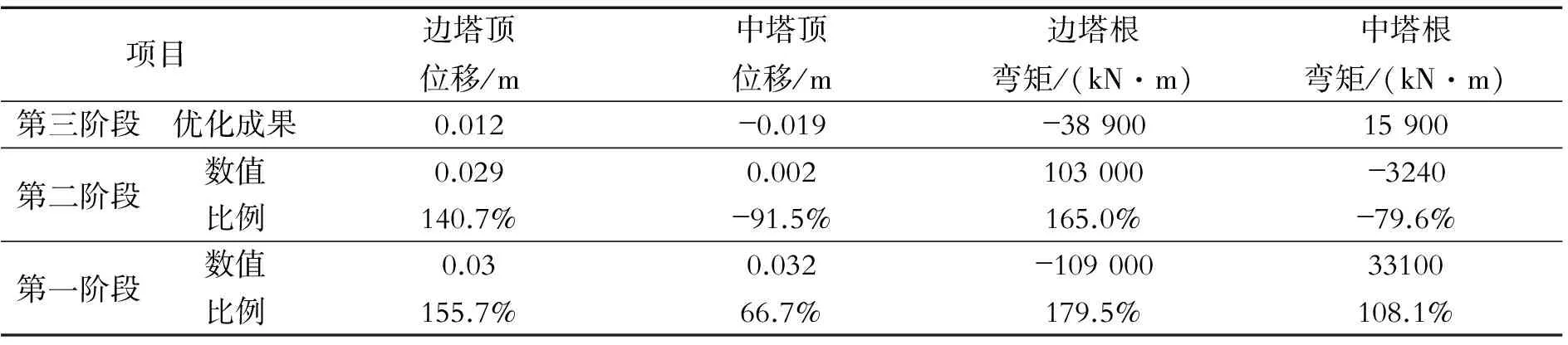
表2 索塔优化结果对比

图7 多塔协作桥立面布置
4 多塔算例
下面应用文中方法确定三~六塔斜拉-悬吊协作体系的合理成桥状态,考察该算法的适用性。多塔协作桥立面如图7所示。考虑到结构对称性,图中仅示出左半桥。结构跨径布置、斜拉索间距及结构截面尺寸等参数同上。索塔由左向右依次编号①、②、③…,主跨跨径按该跨左侧索塔进行编号。
结构采用全漂浮体系,辅助墩及索塔塔底固结;主梁与辅助墩顶之间耦合竖向和横向自由度,主梁与索塔下横梁之间耦合横向自由度。在所有辅助墩、过渡墩和索塔位置处,约束主梁扭转自由度。
应用文中方法确定各方案的合理成桥状态,主梁和缆索的控制截面内力及变形如表 3所示,索塔的塔根内力及塔顶变形如表 4所示,表中应力为弯曲应力。可见,各方案的主梁最大挠度为0.219 m,塔顶最大位移为0.081 m;主梁最大弯矩为35.4 MN·m,对应弯曲应力为17.9 MPa;斜拉索轴力最大约为10 MN,拉索应力约为700 MPa;边塔塔根弯矩应力均小于0.5 MPa,中塔均小于5 MPa,可忽略不计。

表3 主梁、拉索的恒载受力状态
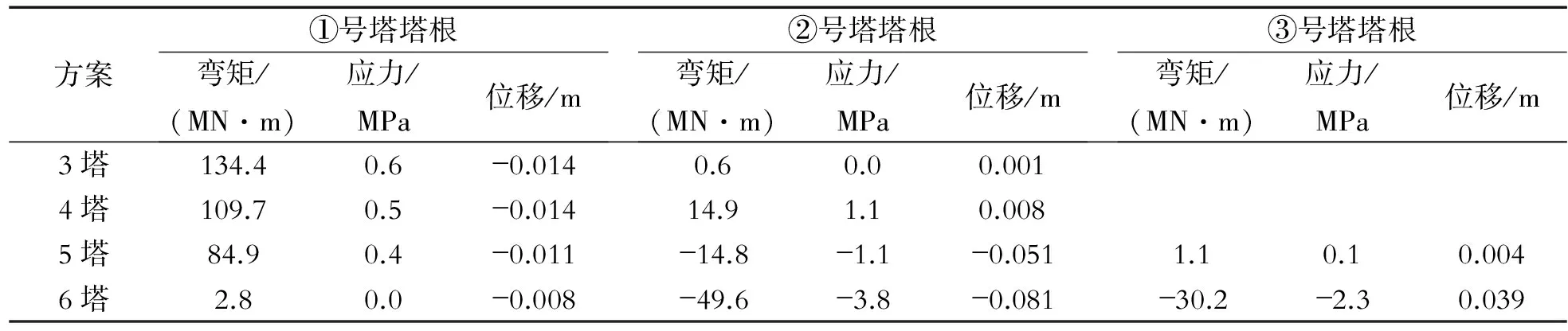
表4 索塔的恒载受力状态
计算表明,结构内力及线形满足既定的合理成桥状态指标。
5 结论
(1)斜拉部分和悬吊部分仅在两者结合处相互影响,故确定斜拉-悬吊协作桥合理成桥状态时,先对悬吊部分找形,再对斜拉部分找形并实施索力优化是可行的。
(2)确定斜拉-悬索协作体桥合理成桥状态的核心是对斜拉部分进行索力优化。将刚性支承连续梁法、零位移法及弯曲能量最小法与ANSYS一阶优化算法合理地组合起来,可以获得预定的目标状态。
(3)微调斜拉索索力,对斜拉部分主梁弯矩影响显著,对其它部分内力影响不大。同时,结构线形变化较小。
[1]曹国辉,胡佳星,张锴,等. 柔性悬索吊桥的几何非线性特性[J]. 中南大学学报:自然科学版, 2014, 45(2): 615-621.
[2] 景天虎,李青宁. 悬索桥主缆成桥线形确定的有限元新算法[J]. 世界桥梁,2012, 40(1): 42-46.
[3] 张志国,邹振祝,赵玉成,等. 悬索桥主缆线形解析方程解及应用[J]. 工程力学,2005, 22(3): 172-176, 189.
[4] 张征,黄才良,张哲. 自锚式吊拉组合体系桥主缆线形计算方法[J]. 大连理工大学学报,2011, 51(5): 688-693.
[5] 周勇,张峰,李术才,等. 悬索桥空间主缆恒载线形分析[J]. 武汉理工大学学报:交通科学与工程版, 2010, 34(5): 1036-1039, 1043.
[6] 罗喜恒. 悬索桥缆索系统的数值分析法[J]. 同济大学学报:自然科学版, 2004, 32(4): 441-446.
[7] 何旭辉,杨贤康,朱伟. 钢桁梁斜拉桥成桥索力优化的实用算法[J]. 铁道学报,2014, 36(6): 99-106.
[8] 张文献,刘旭光,李东炜,等. 斜拉桥成桥及施工阶段的索力优化[J]. 东北大学学报:自然科学版, 2009, 30(8): 1201-1204.
[9] 苏剑南. 厦漳跨海大桥北汊主桥合理成桥状态研究[J]. 桥梁建设,2013, 43(4): 44-48.
[10] 缪长青,王义春,黎少华. 矮塔混凝土斜拉桥成桥索力优化[J]. 东南大学学报:自然科学版,2012, 42(3): 526-530.
[11] 张哲,朱巍志,潘盛山,等. 基于几何非线性的自锚式斜拉-悬索协作体系桥成桥索力计算[J]. 沈阳建筑大学学报:自然科学版,2009, 25(5): 822-828.
[12] 朱巍志,张哲,潘盛山,等. 自锚式斜拉-悬索协作体系桥合理成桥状态确定的分步算法[J]. 土木工程学报,2010, 43(10): 91-97.
[13] 孙斌. 超千米级斜拉桥结构体系研究[D]. 上海: 同济大学, 2008.
Deciding Reasonable Finished Dead State of Multi-Tower Cable-Stayed Suspension Bridges
Zhou Yungang1, Huang Jinchen2
(1.Tongji Architectural Design (Group) Co., Ltd, Shanghai 200092, China;2.Guilin Municipal Engineering Administration Department, Guilin 541002, China)
Based on deflection theory of suspension bridge and optimization method of cable force for traditional cable-stayed bridge, FEA iterative optimization algorithm is proposed for reasonable finisheddead state of multi-tower cable-stayed suspension bridge. In order to realize the target according to the criterion of reasonable completed status, the algorithm uses analytical formula to estimate main cable force and uses rigid supported continuous beam method to calculate the initial cable force. Then, zero displacement method is used to make structural displacement close to zero through iterative computation. Finally, taking the minimum bending energy as the optimization object and setting constraint conditions according to target dead state, the models are solved by the first order optimization method of ANSYS to obtain reasonable dead state, with geometric nonlinearity being fully considered. Four finite element models of three-tower to six-tower cable-stayed suspension bridge with the span of 1 400 m are established and used to establish mathematic optimization model for cable force with the algorithm realized by using ANSYS parametric design language (APDL). Calculated results show that the interplay between suspended part and cable-stayed part is small. Except for peak values appearing in the intersection of suspended part and cable-stayed part, bending moment of beam is well distributed. The inter-force of tower is axial pressure and its bending moment is close to zero. With fine-tuning of the cable force, the bending moment of the cable-stayed beam remarkably changes, yet others slightly changes.
bridge engineering;multi-tower cable-stayed suspension bridge;cable force optimization;reasonable finished dead state;geometric nonlinearity
2016-03-02 责任编辑:车轩玉
10.13319/j.cnki.sjztddxxbzrb.2017.01.02
国家自然科学基金(51378387)
周云岗(1980-),男,工程师,工学博士,主要从事大跨度桥梁设计理论的研究。E-mail:0tjrocket@tongji.edu.cn
U448.225
A
2095-0373(2017)01-0008-07
周云岗,黄晋琛.多塔斜拉-悬吊协作体系合理成桥状态确定方法[J].石家庄铁道大学学报:自然科学版,2017,30(1):8-13.