基于实时水质参数的智能养殖装备设计
2017-04-05王英杰倪冬玮
盛 平, 王英杰, 倪冬玮
(1 江苏大学计算机科学与通信工程学院,江苏 镇江 212013;2 江苏科茂信息技术有限公司,江苏 镇江 212001)
基于实时水质参数的智能养殖装备设计
盛 平1, 王英杰1, 倪冬玮2
(1 江苏大学计算机科学与通信工程学院,江苏 镇江 212013;2 江苏科茂信息技术有限公司,江苏 镇江 212001)
针对现有水产设备机械化和自动化程度较低,增氧机作用范围有限和投饲机无法自适应投饲的问题,研究设计了一种新型的基于实时水质参数的智能养殖装备。该装备硬件上利用传感器对水质参数进行实时监测,采用太阳能与交流电源混合供电。其中,移动式太阳能增氧机使用超声波测距进行避障,可随机行走、增大增氧机的工作范围;太阳能智能投饲机使用称重传感器进行饲料称重,以实现精确定量投饲。该装备软件上支持个人计算机和手机等多个平台客户端,实现实时水质参数查询、远程增氧、远程投饲、远程智能控制等功能。池塘应用试验结果表明,该装备的监测水质数据可信度高,实时通讯丢包率低于0.2%,在保证增氧能力的情况下,增氧机作用范围比传统水车式增氧机提高10%;能够在良好的水质环境中完成精确定量投饲。研究表明,该装备的应用有助于推进水产设备智能化、自动化的发展,实现节能降耗、绿色环保的目标。
智能养殖装备;水质监测;智能增氧;精确投饲
随着计算机技术和智能控制理论的发展,养殖装备作为设施农业的重要组成部分,其自动化控制和管理技术不断提高。水产养殖装备[1-2]性能的优劣会直接影响养殖水体的水质,也间接影响养殖系统的水处理效果,进而影响养殖产量和经济效益。用于池塘增氧的传统型增氧机[3-4]是定点式的,增氧不够均匀且作用范围有限。传统的投饲机[5-6]只能根据设置好的机械状态投喂固定的饲料量,无法根据水质情况进行适时投饲。通常在养殖过程中需要对水质进行实时监测分析,并对水质参数进行调节控制,在此基础上实施投饲,以达到保持良好水环境、促进养殖对象生长的目的。
我国太阳能资源非常丰富,对太阳能资源的利用,可以充分发挥池塘自身的生态优势,符合“节能、环保”的生产理念。设计了一种基于实时水质参数的智能养殖装备,包括移动式太阳能增氧机和太阳能智能投饲机。装备均采用太阳能和交流电源相结合的智能养殖装备供电,选用溶氧、温度和pH传感器完成实时水质数据采集,根据水质数据对智能养殖装备进行自适应控制。
1 总体设计
总体设计目标是开发一种具有智能化设备控制算法并具有特定功能的智能养殖装备。总体设计策略如图1所示。
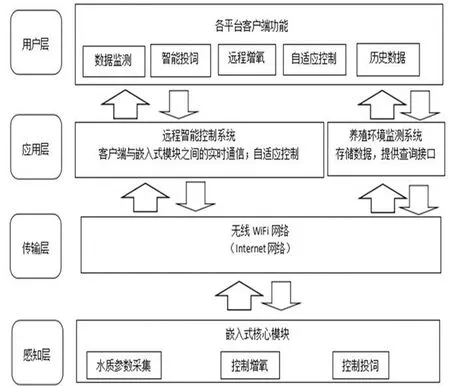
图1 智能养殖装备总体设计图
智能养殖装备感知层主要由嵌入式控制模块、溶氧传感器、pH传感器、移动式太阳能增氧机和太阳能智能投饲机组成,负责接收远程智能控制系统服务端的指令,获取实时水质参数或控制增氧机和投饲机,并将操作结果发回服务端。每5 min采集1次水质数据,并将数据上传到养殖环境监测系统服务端。传输层主要由路由器等组成,提供稳定的网络环境。应用层主要由远程智能控制系统服务端和养殖环境监测系统服务端组成,前者负责用户层和感知层之间的实时通信,自适应控制;后者负责接收感知层上传的水质数据并存储到数据库中,提供查询接口给客户端。用户层主要在各平台上实现客户端系统。
2 硬件设计
2.1 智能电源管理系统
智能电源管理系统[7-9](图2)实时监测蓄电池的荷电状态和工作状态,通常情况下由光伏电池供电,光伏充电器具有最大功率点跟踪(MPPT)功能,能够使光伏电池一直以最大输出功率给蓄电池充电,最大限度地利用太阳能发电。
如果蓄电池荷电量低于额定电压时,智能电源管理系统自动切换为智能充电器给蓄电池充电,为移动式增氧机和智能投饲机提供动力,保证系统正常工作。当蓄电池的荷电量达到工作电压时,智能充电器自动断开,智能电源管理系统切换为光伏充电器进行供电。
2.2 传感器系统
溶氧是水中鱼类赖以生存的必要条件,也是衡量水质好坏的重要指标。采用美国哈希LDO Ⅱ AQ荧光法无膜溶氧传感器采集水体的溶氧和温度参数,适用于淡水养殖。由于探头使用荧光技术,无需更换膜片和电解质溶液,使用方便。传感器12 V供电,溶氧测量范围0~20 mg/L,测量精度为±0.2 mg/L;温度测量范围0~50℃,测量精度为±0.2℃。pH对鱼类的生长、发育和繁殖有着直接或间接的影响,是水质的另一个重要指标。本装备选用联测的SIN-PH8010高精度复合pH电极,适用于淡水养殖,测量范围pH 0~14,测量精度±0.1。
本装备核心板的单片机模块与溶氧、pH传感器通过RS485连接并进行数据通信,实现对养殖水域部分水质参数的釆集和处理。
2.3 移动式太阳能增氧机
本智能养殖装备搭配了一种移动式太阳能增氧机[10](图3)。
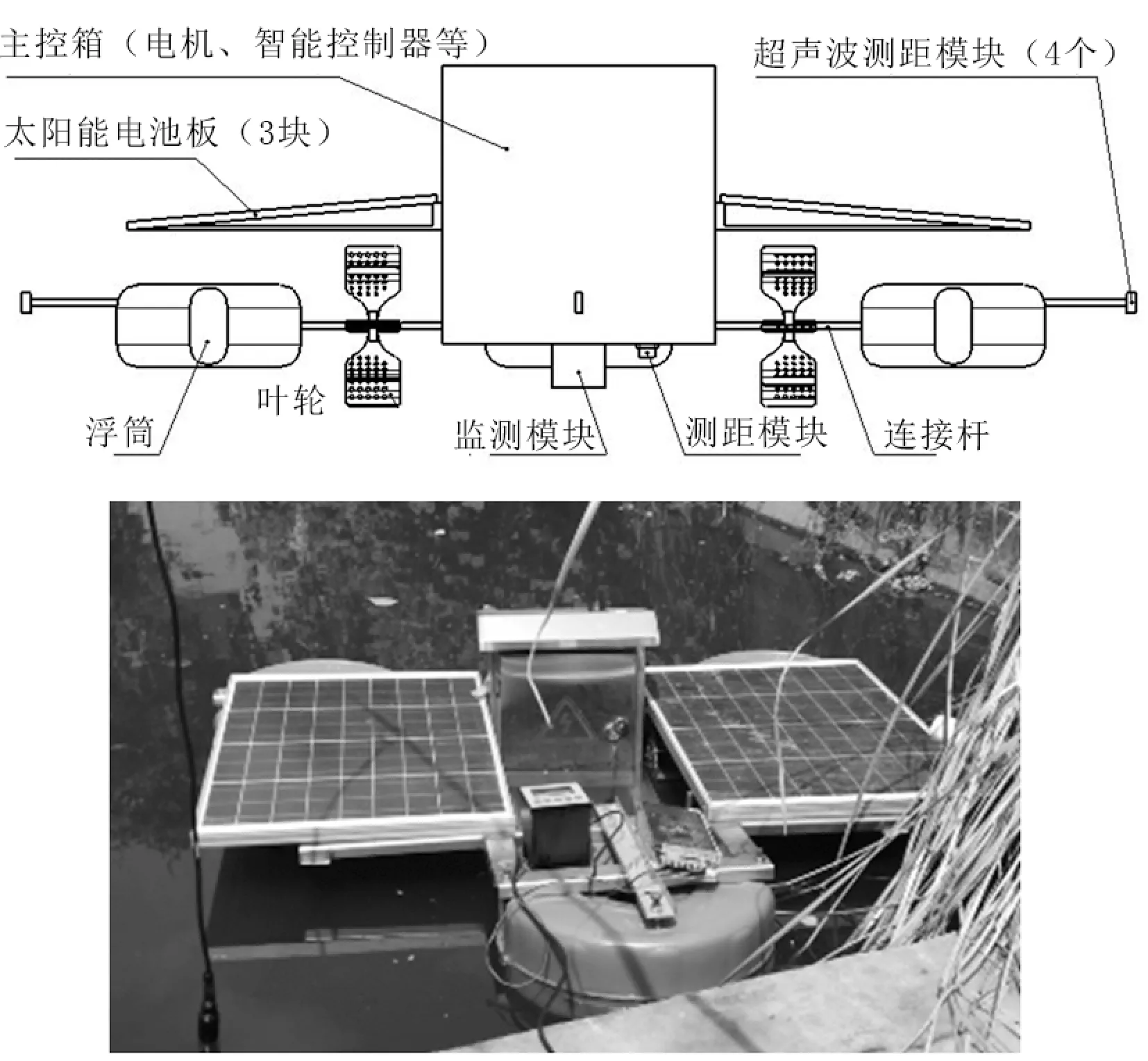
图3 移动式太阳能增氧机的结构示意图和样机
该机由太阳能动力装置、增氧装置和行走装置3部分组成。太阳能动力装置选择的是3块XG-60W型号的太阳能电板,工作电压12 V,功率60 W,电池容量36 AH,电池充满电需要8 h。为了确保太阳能电池板能接收到阳光,装置采用“梯子”三面型,将太阳能电板以4°~8°的角度安放在装置上[11-12],使太阳能电板充电达到最好效果。该机装有4组叶轮电机用于增氧并装备了水下测距和超声波测距两个模块,可随机行走且不会搁浅和碰壁,与传统水车式增氧机工作面积约25%左右相比,移动式增氧机的增氧范围达到35%左右,相比较提升增氧面积10%左右,并且绿色环保,不需消耗传统电网电能。
2.4 太阳能智能投饲机
智能投饲机(图4)由太阳能板、传感器模块、投饲模块、摄像机模块和嵌入式核心模块组成[13-15]。
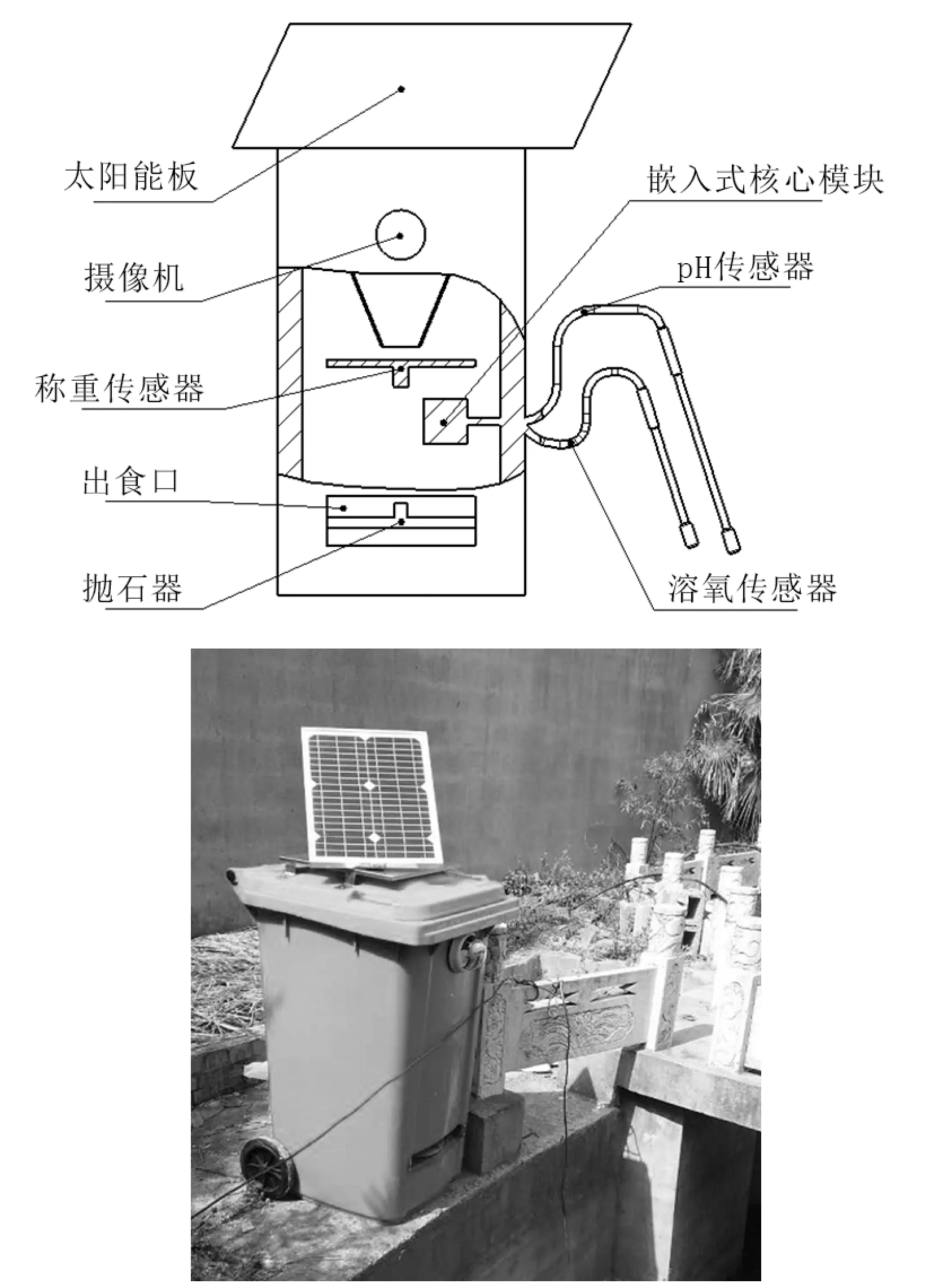
图4 智能投饲机的结构示意图和样机
太阳能模块选择的是1块XG-60W型号的太阳能电板,电池容量36 AH,当蓄电池的荷电量低于额定电压时,电源管理自动切换为外接智能充电器供电。传感器模块包括称重、溶氧、pH三种模块。投饲模块中的储料盒放置在称重传感器上,其下方的输料管连接抛食器,抛食器位于出食口的后方,通过抛食器的高转速电机将食物在出食口抛出。摄像机模块位于出食口的正上方,通过云台控制可以实时查看或远程回放投饲机和增氧机的工作情况。嵌入式核心模块选择上海汉枫科技有限公司提供的HF-LPB100 WIFI模组作为嵌入式处理器。通过HF-LPB100模组传统的低端串口或MCU控制,设备都能快捷地接入WIFI网络,实现物联网控制和管理。嵌入式核心模块中的单片机模块(STM8L051F3)通过串口与嵌入式处理器相连,嵌入式处理器负责接收服务器端的控制指令,再与单片机进行交互。当客户端选择投饲量发送给服务端,服务端将命令转发给核心模块中的嵌入式处理器,单片机模块通过称重传感器进行称重,并将食物通过输料管送到抛食口。溶氧和pH传感器配合自适应控制系统进行智能投饲控制。
3 软件设计
3.1 养殖环境监测系统服务端
养殖环境监测系统服务端由两部分组成:基于C/S构架(客户机和服务器结构)的数据采集服务端和基于B/S[16](浏览器和服务器结构)构架的远程数据查询服务端。前者的数据采集系统主要负责接收每5 min嵌入式模块上传的养殖环境参数,将环境参数存储到数据库中,并开展超限报警等工作;后者则是提供养殖监测环境的历史数据查询接口,该接口可根据用户需求提供每小时、每天、每月、每季度的历史数据。客户端根据查询接口提供的数据形成养殖环境折线图。
3.2 远程智能控制系统服务端
远程智能控制系统服务端主要负责客户端系统和嵌入式模块之间的实时通信,以及根据养殖环境参数随时精准调控智能养殖装备的专家系统,实现自动化[17-18]、智能化控制。本养殖装备饲养专家系统模型采用自适应控制方式[19-21],该控制模型是Smith算法的改进型[22-24],对有延时的数据变化进行预先估算,根据运算结果再进行补偿。该设计在Smith算法中加入自适应回路,构成一种新的自适应Smith算法,既保留Smith算法能克服纯滞后时间的优点,又发挥自适应算法应对参数失配能力强的优势。系统开发以Smith算法为核心,结合MySql数据库,封装了一个专家系统模型,根据具体设施内的对象,将适应该对象的最佳环境参数范围输入专家系统模型接口中,由智能养殖装备启动自适应控制。根据改进Smith算法进行比对分析,然后及时、精准地调控具体动作。
3.3 多平台系统客户端系统
客户端系统[25]支持PC、Android和iOS三个平台。客户端的主要功能有实时水质参数查询、远程增氧、远程投饲、远程智能控制和历史数据查询。客户端与远程智能控制系统服务端的建立基于TCP协议的Socket,以实现上述功能。客户端通过HTTP协议,发送POST请求获取养殖水质的历史数据。
4 现场测试
4.1 测试条件与方法
2016年8月23日,天气晴朗,气温29.6℃,水温25.2℃,风力1~2级,最大光照强度85 391 Lx,选择在镇江某养殖实验基地进行试验,时间为9:00—17:00。该养殖水域面积200 m2,水深约1.5 m,鱼种放养密度30~40尾/m3,预计总产量约200 kg。测试通讯性能、传感器稳定性、增氧机智能控制以及整个智能养殖装备的运行效果。
4.2 试验结果
(1)通讯性能试验。通过“网络调试助手”模拟客户端对整个通讯流程进行测试,统计发送和接收的数据包个数。模拟客户端每1 min请求1次传感器实时数据,每 5 min控制1次设备,连续通讯8 h。测试结果表明,整个通讯过程平均丢包率小于0.2%,系统运行稳定可靠。
(2)传感器稳定性试验。对无膜溶氧传感器和高精度复合pH电极进行稳定性测量。用所设计的系统检测水质参数,每5 min测量1次,重复测量10次。传感器稳定性试验结果如图5所示。由图可知,传感器测量数据稳定、误差较小,未出现异常数据,数据可信度高。
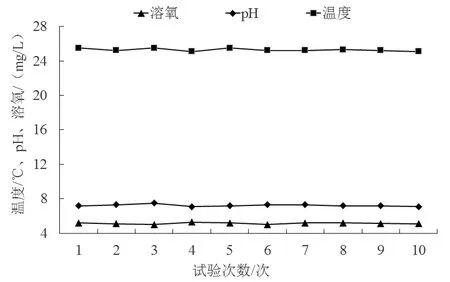
图5 传感器稳定性试验结果
(3)增氧机性能与智能投饲试验。增氧机工作电压和容量分别是12 V和36 AH,增氧机自动开启前,水体溶氧3.6 mg/L,增氧机运行30 min后,溶氧提高至6.7 mg/L。根据标准[26]规定,计算得增氧机增氧能力为1.34 kg/h。由于采用移动式增氧机,选择两个固定测试点和一个移动增氧机上的水质监测点进行试验。两个固定测试点分别放置在池塘两侧,距离岸边1.5 m以上。试验结果如图6所示。
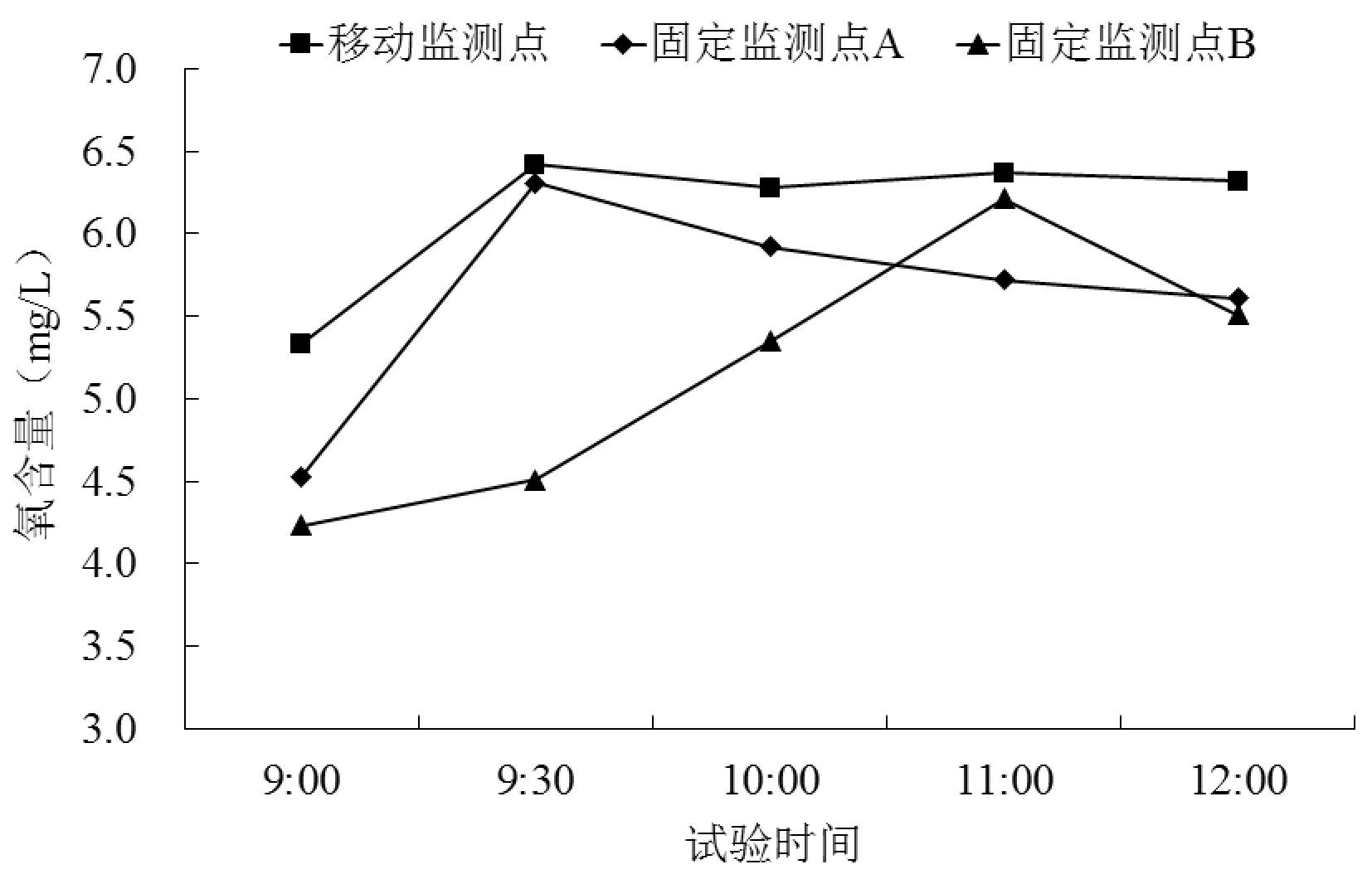
图6 水体溶氧量日变化
移动监测点的溶氧量增加迅速,而固定监测点的变化不大,但一定时间后,溶氧量基本保持在5 mg/L以上,增氧效果较好。智能投饲机工作电压和容量分别是12 V和20AH,远程智能控制系统服务端根据水质的变化进行自适应控制,智能投饲机在3个测试点的溶氧量达到5.5 mg/L的时候,接收到远程智能控制系统服务端的控制命令,开启自动投饲,利用称重传感器实现精准投饲,一般1次投饲在3 kg左右,1 d投饲不超过3次。
5 结论
基于实时水质参数的智能养殖装备的设计与试验表明:采用太阳能和交流电结合为系统供电,功耗较低;监测水质数据可信度高,满足实际需求;实时通讯丢包率低于0.2%;较传统水车式增氧机作用范围提升10%,能够在良好的水质环境中完成精确定量投饲。相比于传统的养殖装备,本装备推进水产设备智能化、自动化的发展,有助于实现节能降耗、绿色环保的目标。
□
[1] 谷坚,徐皓,吴刚.水产养殖装备与工程研究进展[J].河北渔业,2011,1:40-44.
[2] 冯天乔,刘付永忠,于培松,等.我国水产养殖装备研制应用的发展与展望[J].中国水产,2015(7):91-93.
[3] 刘文珍,徐节华,欧阳敏.淡水池塘养殖增氧技术及设备的研究现状与发展趋势[J].江西水产科技,2015(4):41-45.
[4] 顾海涛,王逸清.我国池塘增氧技术现状与发展趋势[J].渔业现代化,2014,41 (5):65-68.
[5] 邓素芳,杨有泉,陈敏.全自动饵料精量投喂装置的研究[J].农机化研究,2010,32(11):103-105.
[6] 杨家朋,张拥军,唐荣,等.太阳能投饵机光伏供电系统的设计[J].渔业现代化,2014,41(2):28-31.
[7] 张开生,程盼.基于MPPT的太阳能照明控制器研究[J].陕西科技大学学报,2015(1):160-164.
[8] 黄鹏,白帆,王学峰.太阳能光伏发电发展趋势分析[J].中国科技信息,2014(3):31-32.
[9] 谷峰.太阳能LED路灯照明系统中控制器和驱动器的设计[D].西安:西安电子科技大学,2013.
[10]相恺,赵建宝,张晓青.浮体叶轮式增氧机的设计[J].江苏农机化,2016(2):27-28.
[11]叶宝安,乔国栋,周书民,等.太阳能最佳安装角度测量系统设计与实现[J].电子测量技术,2014,37(6):127-130.
[12]张朝阳,徐敬龙.太阳能电池板角度控制系统的研究与设计[J].吉林师范大学学报(自然科学版),2015,36(1):95-98.
[13]焦仁育.投饵机下料机构的现状分析[J].河南水产,2011(1):23-24.
[14]葛一健.我国投饲机产品的发展与现状分析[J].渔业现代化,2010,37(4):63-65.
[15]虞宗敢,高翔,虞宗勇.气力投饲系统的研制[J].渔业现代化,2006(2):45-46.
[16]麼玉霞.基于B/S模式的水环境监测系统设计与实现[D].成都:电子科技大学,2013.
[17]王志勇,谌志新,江涛,等.标准化池塘养殖自动投饵系统设计[J],农业机械学报,2010(8):77-80.
[18]程寅,王春琳,母昌考,等.一种带自动投饵系统的工业化水产养殖场:CN201320780208.0[P].2014-06-04.
[19]匡秋明,赵燕东,白陈祥.节水灌溉自动控制系统的研究[J].农业工程学报,2007,23(6):136-139.
[20]田应平,杨兴,周路,等.工厂化水产养殖自动投饵系统的设计[J].贵州农业科学,2010,38(5):238-242.
[21]王志勇,谌志新,江涛.集中式自动投饵系统的研制[J].渔业现代化,2011,38(1):46-49.
[22]刘迪,倪远平,李正,等.Simth算法与改进Smith算法在啤酒发酵温控中的对比研究[J].酿酒科技,2010(8):62-64.
[23]蔡黎,代妮娜,朱家奎.基于自适应Smith算法的烧制窑温控策略[J].自动化与仪表,2011,26(2):42-44.
[24]王彦,刘宏立,杨柯,等.暖通空调控制系统Simth预估器自适应算法设计[J].信息与控制,2011,40(3):408-412.
[25]李慧,刘星桥,李景,等.基于物联网Android平台的水产养殖远程监控系统[J].农业工程学报,2013,29(13):175-181.
[26]SC/T6009-1999,增氧机增氧能力试验方法[S].
Design of intelligent aquaculture equipment based on real-time water quality monitoring
SHENG Ping1,WANG Ying jie1,NI Dong wei2
(1SchoolofComputerScienceandCommunicationEngineering,JiangsuUniversity,Zhenjiang212013,China;2JiangsuKeMaoInformationTechnologyCompanyLimited,Zhenjiang212001,China)
In view of the limitations of current aquaculture equipment such as low level of mechanization and automation,limited working scope of aerators and low adaptability of feeding machines,a new intelligent aquaculture equipment based on real-time water quality parameters monitoring is designed and researched in this paper.The equipment hardware is powered by solar energy and AC power,and it monitors water quality parameters by sensors in real time.The mobile solar aerator uses ultrasonic ranging to avoid obstacles,and in this way,it can walk randomly and expand the working scope.The smart solar-energy feeder uses weighing sensors for weighing feed,realizing precise quantitative feeding.The equipment software supports personal computers,mobile phones and other platform clients,realizing many functions such as real-time water quality parameters checking,remote aerating,remote feeding,and remote intelligent controlling.The pond application tests show that the equipment has higher reliability in water parameters monitoring and an instance messaging packet loss rate of lower than 0.2%;while guaranteeing the aerating capacity,it has an aerating area that is 10% larger than that of traditional aerators;besides,it can realize precise quantitative feeding in good water environment.The research shows that the application of this equipment would promote the development of intelligentization and automation in aquatic equipment,and the realization of energy saving and environmental protection.
intelligent aquaculture equipment;water quality monitoring;intelligent oxygen;accurate feeding
10.3969/j.issn.1007-9580.2017.01.001
2016-12-07
2017-02-05
江苏省产学研联合创新资金项(BY2014123-03);镇江市科技创新资金项目(NY2016010)
盛平(1957—),男,研究员,研究方向:计算机应用及农业物联网。E-mail:pingsheng@ujs.edu.cn
S969.31+1
A
1007-9580(2017)01-001-06
