基于CANopen协议的转台双电机同步控制
2017-04-03钱俊璋马文礼林梦云
钱俊璋, 马文礼, 林梦云
(1.中国科学院 光电技术研究所,四川 成都 610209; 2.中国科学院大学,北京 100049)
0 引 言
引言单电机直接驱动的控制方式广泛应用在光电经纬仪和大型望远镜中[1-3]。随着经纬仪和望远镜口径越来越大,传统的单电机驱动方式会引起驱动力不一致,从而导致刚性支柱变形而影响跟踪精度。因此,研究双电机同步驱动对于提高大型望远镜的跟踪精度有非常重要的意义。
CAN(Controller Area Network,控制器局域网)总线是由Bosch公司设计的一种多主总线,由于可靠性高、成本低,can总线被认为是最有前途的现场总线之一[4]。CANopen协议是基于can的高层通信协议,并在工业系统中占据主导地位[5]。CANopen还专门为不同的接口设备应用子协议定义了行规,其中子协议CiA402对伺服驱动器、变频器等设备的参数和运行模式进行了规范,从而大大降低了开发难度。因此,将现场总线与伺服电机结合起来可以有效提高双电机同步性能。
因此,本文结合CAN总线和商业伺服驱动器,设计了一套基于CANopen协议的双电机伺服控制系统方案,并进行了同步运动控制实验。
1 CANopen协议简析
CANopen协议包括设备模型,通信模式和对象字典三大部分,其中对象字典最为重要[6]。
1.1 设备模型
CANopen设备如图1所示,一边接应用设备的I/O数据端口,另一边接CAN总线。制造商为设备应用部分提供了相关的设备规范。为了能访问CANopen设备的对象字典,设备必须实现 CANopen协议栈的相关功能。
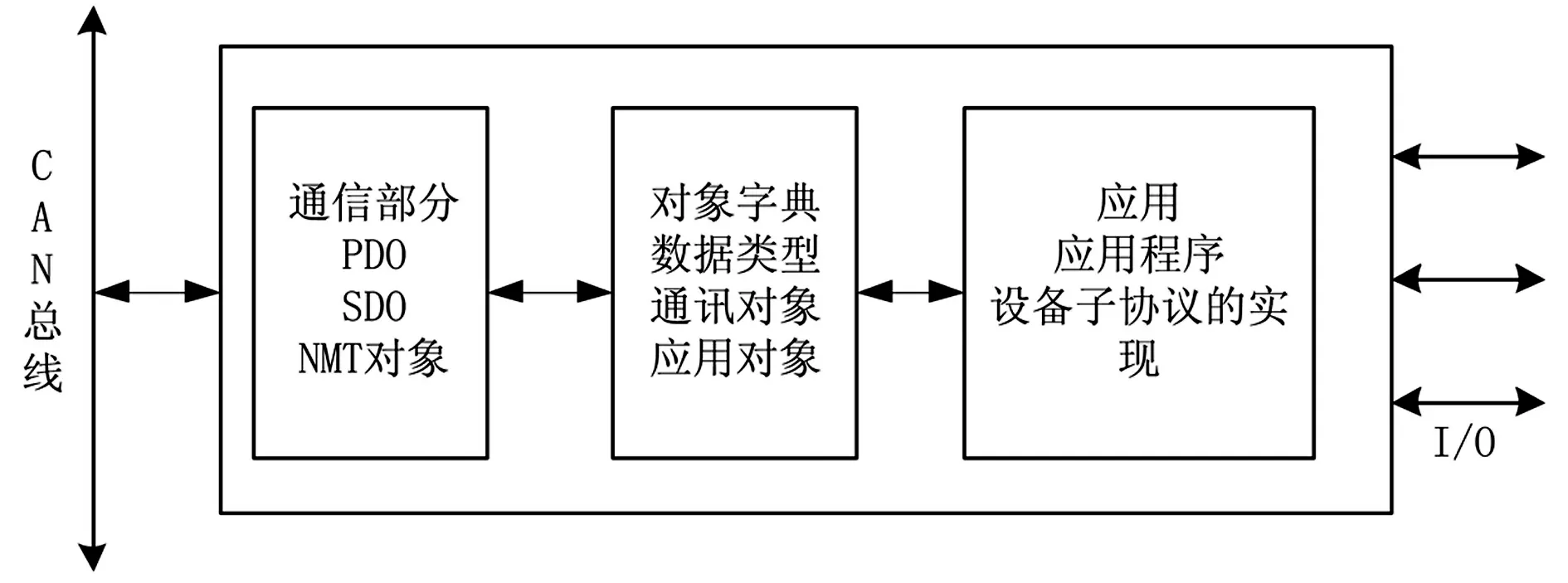
图1 CANopen设备模型
1.2 对象字典
每个设备都拥有一个对象字典。对象字典是所有数据结构的集合,这些数据结构涉及设备的应用程序、通信以及状态机。对象字典利用对象来描述CANopen设备的全部功能,并且它也是通信接口与应用程序之间的接口。对象字典中通讯子协议区域( 如设备类型, 错误寄存器, 支持的 PDO 数量)的索引为: 1000-1FFF; 标准设备子协议区域的索引为: 6000-9FFF。
1.3 CANopen通讯模型
CANopen定义了4种不同类型的通信对象:过程数据对象(PDO)、服务数据对象(SDO)、网络管理对象(NMT)和特殊功能对象。这四类通信对象(COB)都是由一个或多个报文实现的。过程数据对象(PDO)用来传输实时数据的;服务数据对象(SDO)用来访问节点的对象字典和配置网络参数,建立两个CANopen设备之间的客户/服务器的关系;网络管理对象(NMT)负责监控设备和网络的启动;特殊功能对象是指同步(SYNC)、时间标记对象、紧急报文、节点保护等。
2 双电机控制伺服系统
双电机伺服电机控制系统主要由工控机、CPCIE机箱、伺服驱动器及永磁同步电机(PMSM)组成。工控机与CPCIE机箱通过网线连接,CPCIE机箱作为主站,通过CAN总线与两台伺服驱动器交换数据,实现远程监控。
系统结构如图2所示,整个系统中CPCIE机箱作为CAN总线的主站,伺服驱动器作为从站,CPCIE机箱与伺服驱动器之间的通信协议为CANopen。为了保证双电机的同步性,使用CANopen协议定义的同步信号(SYNC)来触发TPDO和RPDO。同步控制策略如图3所示。运行过程中,主站以1KHz的频率通过CAN总线向驱动器发送SYNC,并触发发送参考电流1和参考电流2到总线上,从站设备接收到SYNC后触发驱动器将编码器1和编码器2的数据通过PDO发送到总线上,主站根据COB-ID接收相应编码器数据并在伺服控制板上进行位置回路运算和各自的速度回路运算,并在下一个SYNC到来后将各自驱动器的参考电流发送到总线上,各个驱动器根据COB-ID接收相对应的数据并执行相应动作。通过循环发送SYNC的方式可以实现CPCIE机箱与驱动器机箱之间的周期通信,从而保证了实时性,并能达到双电机的高精度同步运动要求。

图2 双电机控制伺服系统
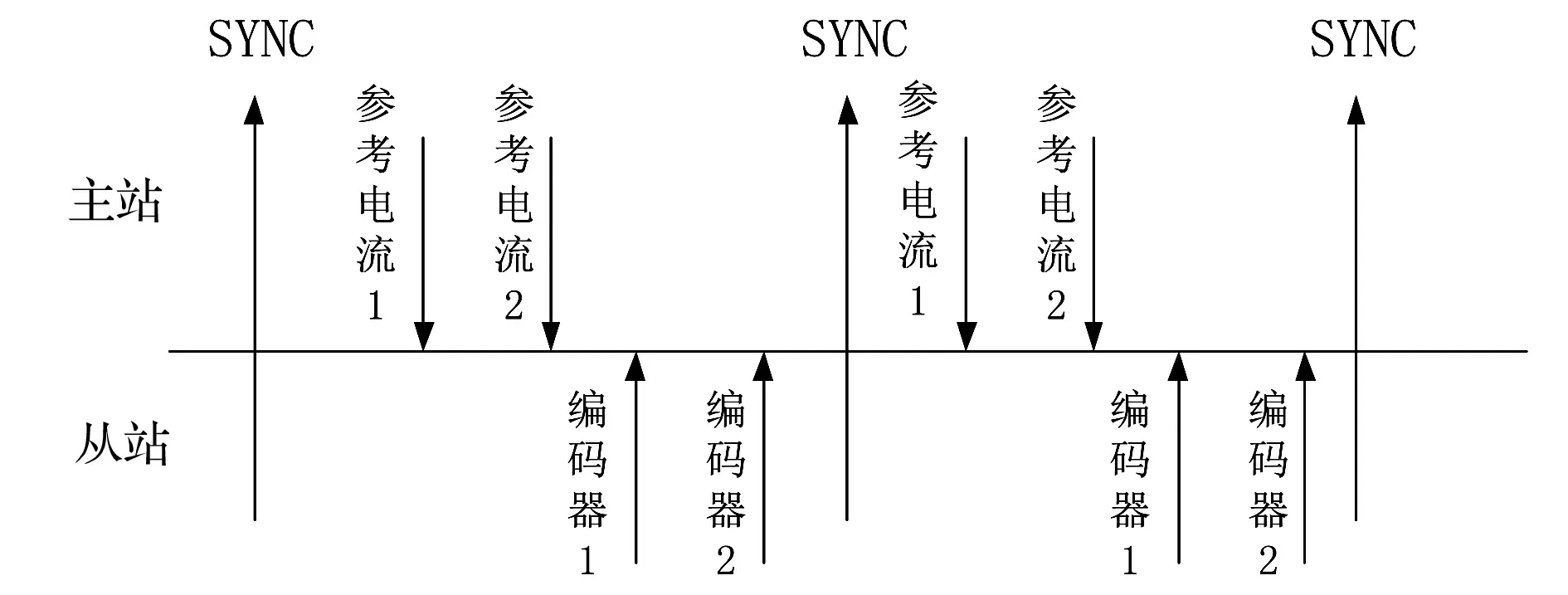
图3 CAN总线同步控制策略
国内外许多学者和科研人员对多电机同步控制有所研究[7-9]。从控制角度来看,目前多电机同步控制的策略主要有:主从控制、等同控制、交叉耦合控制和偏差耦合控制等。由于大型望远镜是柔性链接的控制系统,为了消除俯仰轴两端电机由于转速不同而导致的不同步问题,因此采用交叉耦合的控制策略,控制框图如图4所示。
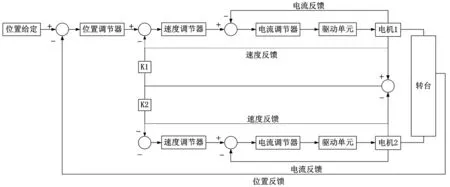
图4 双电机控制结构框图
3 实验测试结果
实验平台如图5所示,对实验平台的俯仰轴分别进行了单电机控制和双电机控制的位置闭环测试,位置参考等效正弦为y=sin(0.1t)。

图5 双电机实验平台
图6和图7分别描述了单电机控制和双电机控制位置闭环的跟踪误差,其均方根误差分别为0.298 0″和0.281 3″。图8描述了双电机控制两个电机同步误差。从图6~图8可以看出,基于CANopen协议的双电机交叉耦合同步控制效果非常好。
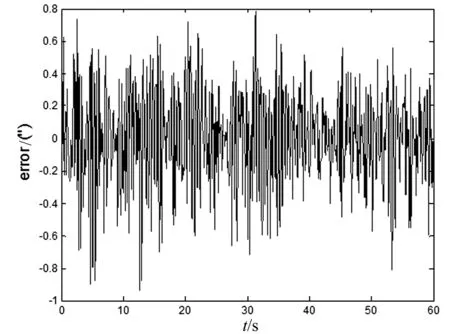
图6 单电机控制跟踪误差

图7 双电机控制跟踪误差

图8 双电机控制两个电机的同步误差
4 结束语
CANopen协议公开透明,便于开发的优点,在多轴运动控制上是一种高效的数据传输方法。本文利用 CANopen 协议实现了主站与从站伺服驱动器之间的数据通讯,在跟踪轨迹为y=sin(0.1t)的正弦曲线,基于交叉耦合控制策略的双电机控制和单电机控制的均方根误差分别0.281 3″和0.298 0″。实例验证表明,CANopen协议在伺服控制上具有较高的可行性和可靠性,这对双电机控制在柔性链接的驱动控制中有着指导意义。
参考文献:
[1] 马佳光. 捕获跟踪与瞄准系统的基本技术问题[J]. 光电工程, 1989,26(3):1-42.
[2] 毕永利, 刘洵, 葛文奇,等. 机载多框架陀螺稳定平台速度稳定环设计[J]. 光电工程, 2004, 31(2):16-18.
[3] 唐涛, 张桐, 杜俊峰,等. 光电经纬仪中双电机同步控制技术[J]. 光电工程, 2014, 41(1):1-5.
[4] 宋海亮. CAN总线的特点及发展趋势[J]. 科学与财富, 2010,12(8):6-7.
[5] 李澄, 赵辉, 聂保钱. 基于CANopen协议实现多电机系统实时控制[J]. 微电机, 2009, 42(9):53-56.
[6] 史久根, 张增仁, 陈真勇. CAN现场总线系统设计技术[M]. 北京:国防工业出版社, 2004.
[7] KOREN,Y. Cross-coupled biaxial computer controls for manufacturing systems[J]. Journal of Dynamic Systems Measurement & Control, 1980, 102(4):265-272.
[8] TURL G, SUMNER M, ASHER G M. A synchronized multi-motor control system using sensorless induction motor drives[C]//Interational Lonference on Power Electronics, Machines & Drives.2002:38-43.
[9] PEREZPINAL F J, CALDERON G,ARAUJOVARGAS I. Relative coupling strategy[C]//IEEE International. Electric Machines and Drives Conference, 2003:1162-1166.
