基于扩张状态观测器的牵引逆变器中点平衡控制策略
2017-04-03谭喜堂吴优朱琴跃刘涛李冠华
谭喜堂,吴优,朱琴跃,刘涛,李冠华
(同济大学 电子与信息工程学院,上海 201804)
0 引 言
牵引逆变器是城市轨道交通牵引传动系统的重要组成部分,其性能好坏直接关系到列车能否安全可靠运行。目前,相比于其他主电路拓扑结构,中点箝位型(Neutral Point-Clamped,NPC)三电平逆变器凭借其优势已在城轨列车牵引传动系统中得以广泛应用。与二电平拓扑结构相比,NPC三电平逆变器具有输出电压谐波含量少,耐压等级高,功率器件等效开关频率高等特点[1-2],然而由于其自身拓扑结构的一些特点,导致该类逆变器工作时会出现直流侧上下分压电容电压不平衡的情况,从而引起其输出电压发生畸变,谐波含量变大,严重影响工作性能。
为此,NPC三电平逆变器中点电位平衡控制一直都是国内外学者的研究热点,相关控制策略也相继被提出。文献[3]从硬件拓扑出发,设计了一种可以平衡三电平逆变器中点电位的硬件电路,但硬件拓扑方案增大了系统体积、损耗和不稳定性,且不适用于中高压领域。文献[4-7]通过调整NPC逆变器大、小开关矢量(冗余开关状态)的作用时间来调整中点电位,该方法可实现定性控制的目标,但控制精度不够高且对中点电位波动产生问题缺乏本质上的认识。文献[8-10]则利用基于虚拟空间矢量的调制方法使输出三相电流之和为零时,实现对中点电压的全范围控制,但却无法解决计算中近似处理与累计效应造成的中点电位不平衡。为此,部分学者从另一角度基于注入零序电压分量的空间矢量PWM(Space Vector Pulse width Modulation,SVPWM)方式研究NPC三电平逆变器中点电位平衡控制问题[11],但其不足之处在于只考虑了按正序电压分量进行区间划分控制而忽略了注入的零序电压分量的影响。针对此不足,文献[12]提出了“预估-校验-修正”的实时控制算法,达到了一定的控制效果。但其计算量较大,且基于开关周期控制的思想使得该方法存在不完全可控区域。以上方法分别从硬件和控制策略方面对逆变器中点电位平衡进行控制,但由于均未从本质上分析中点电位不平衡产生机理,从而在不平衡波动控制精度等方面都还存在不尽如人意的地方。
鉴于此,本文主要从分析NPC三电平逆变器中点电位波动产生机理入手,基于等效电路模型建立中点电位数学模型,在此基础上优化三电平逆变器电压外环控制策略,提出一种中点电位直接控制方法:采用扩张状态观测器(Extended State Observer,ESO)估计中点电位的波动,并利用PI控制器实现中点电位波动的补偿,以期达到快速而准确地控制电容电压平衡、输出电压谐波含量少的目的。
1 三电平逆变器d-q坐标系下的闭环控制原理
图1为NPC三电平逆变器主电路图。图中udc为直流侧母线电压,uo为中点电位,L为输出滤波电感,C为输出滤波电容,u为滤波前逆变器输出的电压,i为滤波电感L上的电流,uL为负载电压,iL为负载电流。对L,C列写方程:
(1)
(2)

图1 NPC三电平逆变器主电路
根据克拉克(CLARKE)和帕克(PARK)变换可知,从三相静止坐标系a-b-c到两相同步旋转坐标系d-q的变换矩阵为:
从而得到两相旋转坐标系下的电压电流方程:
(3)
有了上述分析之后,就可以建立三电平逆变器在d-q坐标系下的数学模型,通过检测三相负载电压和电流,经过坐标变换可以得到两相旋转坐标系下对应的d,q轴分量,电压外环实现对输出电压的控制,电流内环实现对输出电感电流的控制。图2为d-q坐标系下的双闭环控制系统原理结构图。
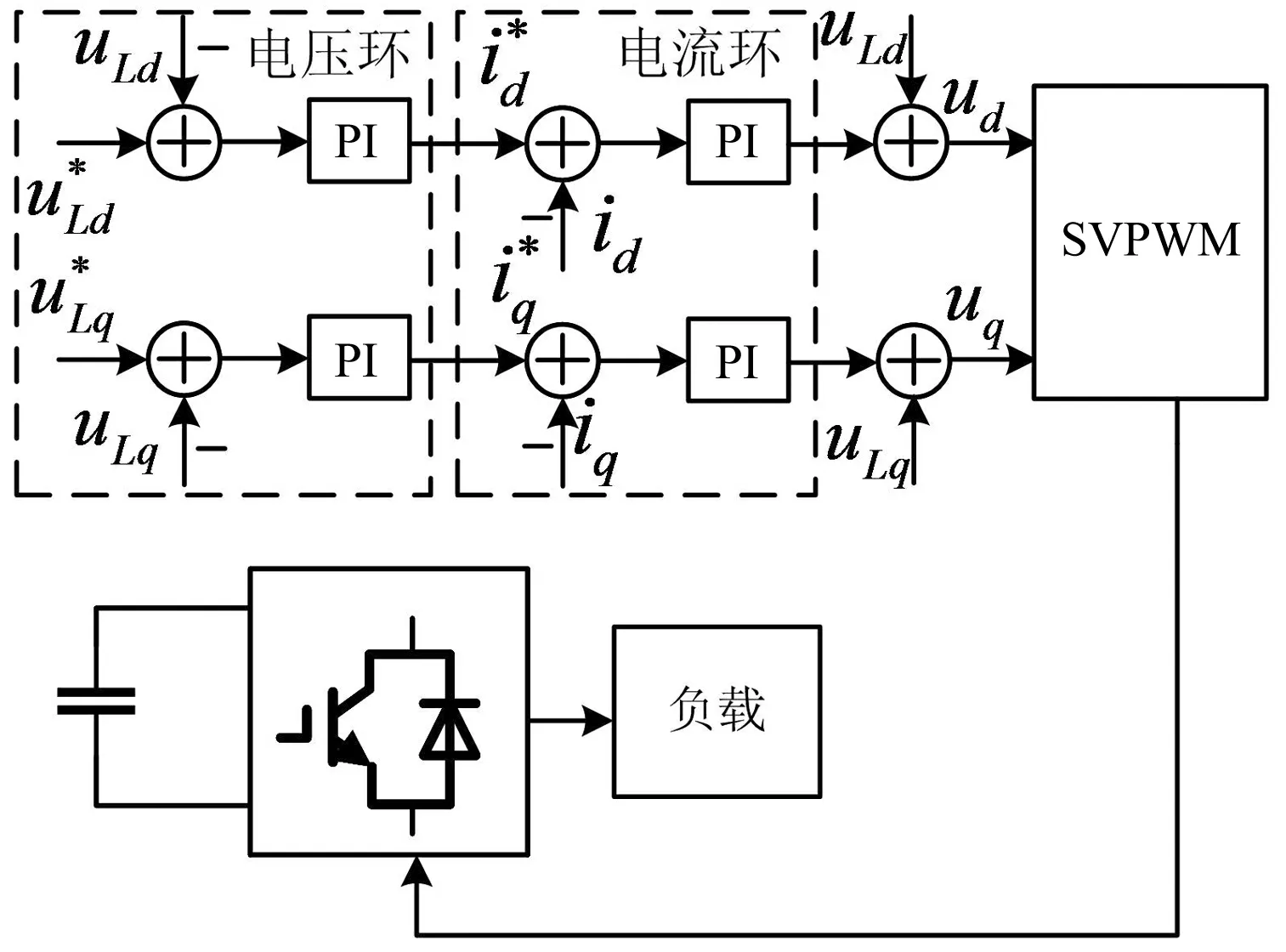
图2 d-q坐标系下三电平逆变器双闭环控制系统结构
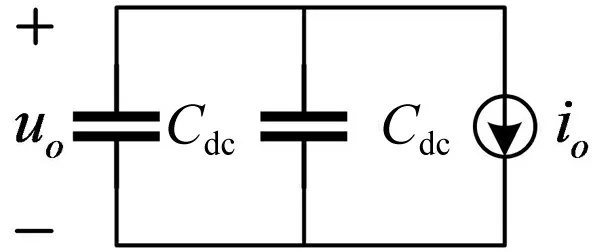
图3 中点电位小信号电路模型
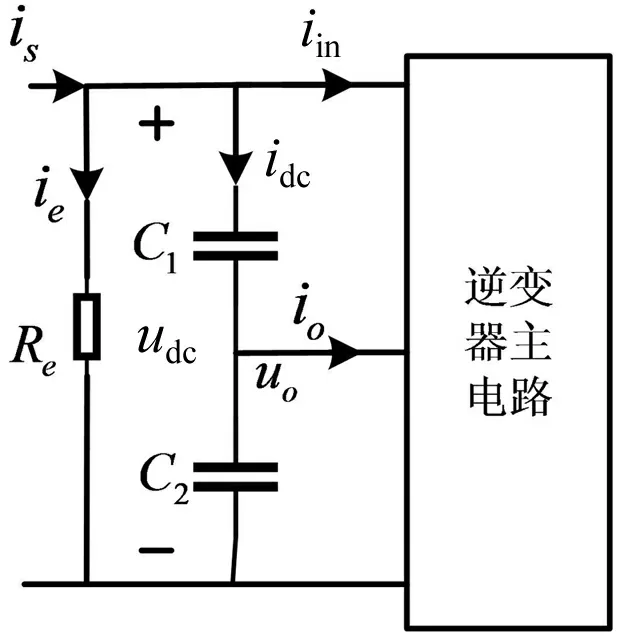
图4 直流侧等效电路
2 三电平逆变器中点电位数学模型
为实现中点电位波动有效补偿与控制,有必要分析中点电位波动机理,建立中点电位数学模型。对图1中三电平逆变器主电路进一步分析可知,其相应的中点电位波动小信号电路模型[13]如图3所示。其中,直流侧电容Cdc为图1中原直流侧电容的等效值,即Cdc=C1=C2,uo,io分别等效为中点电位和电流。
由图3可知,逆变器直流侧中点电位可表示为:
(4)
由式(4)可知,当逆变器输入侧存在中点电流且其流入、流出直流侧电容时,必然引起2个电容存储电荷发生变化,从而造成中点电位波动,而中点电位的大小直接反映了逆变器直流母线电压的变化。为此,假设Δudc为直流母线电压变化量,则可令Δudc≜uo(t)。这样,可通过测量直流侧电压来分析并评估中点电位的波动情况。
基于此可得图1所示逆变器直流侧等效电路[14]如图4所示。
图4中,Re为直流侧电源与逆变器输入侧的线路等效电阻,is为逆变器直流侧电源输入电流,iin为逆变器输入电流,udc,idc分别为直流母线电压及电流,由此可得:

(5)
结合图3所示小信号电路模型进一步分析可知,对中点电流的分析就是对中点电位的分析,从观察并评估中点电位扰动的角度出发,式(5)可进一步表示为:
(6)
令:
则有:

(7)
式中:u为输入量,u≜iin;udc为输出量(被控量);w为扰动量,w≜(uo/Cdc-bis);a,b为状态方程系数。这样,就得到了中点电位的数学模型,据此,下文将对中点电位平衡进行控制。
3 基于ESO的牵引逆变器中点电位平衡控制策略
3.1 基于ESO的中点电位扰动估计
由于ESO是一种新型的自抗扰控制技术,主要利用原系统中可以直接测量的变量作为它的输入信号,并使其输出的观测信号与原系统的状态变量之间的估计误差逐渐逼近于0。因此,与一般观测器相比,它是一种可将影响系统被控输出的总扰动扩张成新的状态变量,进而对系统状态变量和总扰动进行估计的非线性观测器[15]。
由上节分析可知,中点电位波动会对直流母线电压产生扰动,致使母线电压和中点电位难以被有效控制。为此,本系统中可将中点电位作为一种内部扰动,通过ESO进行实时估计;并通过PI控制器实现中点电位的补偿,以实现中点电位平衡控制和直流母线电压的有效控制。
由式(7)可知中点电位数学模型为一阶,故可设计以udc为输入的二阶非线性ESO,实现在实时跟踪直流母线电压的基础上,估计由于中点电位波动而产生的扰动作用。相应的ESO设计如下:
(8)
式中:β01,β02为观测器待调参数;z1为udc的跟踪值;z2为扰动w的估计值;fal(e,α,δ)选取为非线性幂次函数。

(9)
式中:α,δ为给定的常数。
3.2 中点电位平衡控制
在实现了中点电位波动估计以后,需要对其进行补偿。由于采用PI控制器具有较好的效果,故本文设计如下PI控制器:
(10)

为此,基于ESO控制方法而得的三电平逆变器双闭环控制系统结构如图5所示。相比于图2所示的控制系统,图5中基于ESO和PI控制的中点电位平衡控制方法对原有双闭环控制系统中的电压外环控制策略进行了优化,而电流内环仍然采用原有控制方法,调制策略采用传统的SVPWM方法。

图5 基于ESO的三电平逆变器双闭环控制系统结构
3.3 不同工况对牵引逆变器中点电位影响分析
当基于NPC三电平拓扑结构的牵引逆变器用于城轨列车牵引传动系统时,列车的不同运行工况也会对逆变器的中点电位产生影响[16]。图6为牵引工况下牵引逆变器中点电位发生偏移的示意图,此时,直流电流从电源流向逆变器,SVPWM控制中的P型矢量(如POO)会导致电容电压uC2升高,而N型矢量(如ONN)则使得电容电压uC2降低,从而引起中点电位产生波动。而在再生制动工况下,相同的开关状态结果正好相反,具体原理与牵引工况类似,故不再赘述。因此,对牵引逆变器中点电位进行平衡控制时,必须考虑不同工况对其的影响,并通过实时调整SVPWM控制策略小矢量的作用时间来综合平衡中点电位。

图6 牵引工况对牵引逆变器中点电位偏移的影响示意
4 仿真验证
为了验证本文提出的基于ESO的NPC三电平逆变器中点电位平衡控制策略的有效性,下文以上海地铁2号线的牵引逆变器为应用对象,在MATLAB/Simulink环境下对逆变器双闭环控制系统中的控制策略进行了仿真建模, 从动态和稳态输出两方面分别对比分析图2所示原有系统控制策略与本文所提优化控制策略(图5所示)对逆变器中点电位平衡控制的效果。仿真参数假设如下:逆变器直流侧电压1 500 V,基波频率f1=50 Hz,IGBT的开关频率fs=10 kHz,调制比m=0.8,电容C1=C2=2 000 μF,滤波电感2 mH,滤波电容200 μF;扩张状态观测器控制参数β01=20,β02=200,非线性幂次函数参数δ=0.000 1,α=0.5。以传动系统工作在牵引工况为例进行仿真,基于原有方法和本文所提方法而得的牵引逆变器中点电位uo和直流母线电压udc以及输出侧负载电压的频谱分析结果分别如图7和图8所示。

图7 中点电位和母线电压输出波形
由图7(a)和图7(b)所示仿真波形可知,原有方法下中点电位起始波动较大,动态响应持续时间较长,仿真时间达2 s左右进入稳定输出状态,稳态时中点电位维持在-6 V到8 V之间波动,其波动率为1.87%左右;直流母线电压则在起始处经过短暂动态调整后即于T2=0.13 s进入稳态响应阶段,并始终保持直流750 V稳定输出。相比于此,本文所提方法下中点电位动态响应持续至1.2 s即进入稳态响应输出,且电位波动较小,稳态时中点电位在-5 V到5 V之间波动,其波动率为1.33%;同时直流母线电压也具有与原有方法相同的稳定控制效果。显然,本文所提方法较原有方法具有较快的动态响应收敛速度和较好的中点电位波动抑制能力,同时也兼顾了直流母线电压稳定控制的性能。
从图8(a)和图8(b)所示的逆变器输出侧负载电压频谱图可以看出,在原有方法下负载电压的总谐波畸变率为1.32%;而在本文方法下负载电压的总谐波畸变率为0.41%。由此可知,本文所提方法也能较好地抑制逆变器输出电压谐波含量,可进一步提高负载控制性能。

图8 输出电压频谱图
5 结束语
针对牵引逆变器中点电位不平衡问题,本文提出了一种基于扩张状态观测器的中点电位平衡控制策略。首先分析了逆变器在d-q坐标系下的闭环控制原理,然后建立了中点电位的数学模型,将直流母线电压作为被控量,中点电位作为系统扰动,从而利用扩张状态观测器实现中点电位的实时估计,并使用PI控制器实现中点电位的补偿。仿真结果表明,该控制策略能实现中点电位波动抑制和直流母线电压的有效控制,具有较好的动态和稳态性能。
参考文献:
[ 1 ] TEICHMANN R, BERNET S. A comparison of three-level converters versus two-level converters for low-voltage drives, traction, and utility applications[J]. IEEE Transactions on Industry Applications, 2005, 41(3):855-865.
[ 2 ] NEWTON C, SUMMER M. Multi-level convertors a real solution to medium/high-voltage drives?[J]. Power Engineering Journal, 1998, 12(1):21-26.
[ 3 ] 吴云, 尹若银. 三电平逆变器中点电位平衡电路仿真[J]. 煤矿机械, 2014, 35(5):57-58.
[ 4 ] 束满堂, 吴晓新, 宋文祥,等. 三电平逆变器空间矢量调制及其中点控制的研究[J]. 电气传动, 2006, 36(8):26-29.
[ 5 ] 宋文祥,陈国呈, 陈陈. 基于矢量合成的三电平空间电压矢量调制方法[J]. 电工技术学报, 2007, 22(10):91-96.
[ 6 ] 金永顺.三电平逆变器SVPWM方法的分析与研究[D]. 长沙:湖南大学, 2007.
[ 7 ] 周文生, 姚钢, 宋文祥. 中点箝位型三电平逆变器控制方法的综合研究[J]. 电气传动自动化, 2008, 30(2):6-9.
[ 8 ] 胡存刚, 王群京, 李国丽,等. 基于虚拟空间矢量的三电平NPC逆变器中点电压平衡控制方法[J]. 电工技术学报, 2009, 24(5):100-107.
[ 9 ] 范波,赵伟刚, 刘刚,等. 基于优化虚拟矢量的三电平逆变器中点电 位平衡闭环控制[J]. 电工技术学报, 2015, 30(4):179-186.
[10] 桂石翁, 吴芳, 万山明,等. 变虚拟空间矢量的三电平NPC变换器中点电位平衡控制策略[J]. 中国电机工程学报, 2015, 35(19):5013-5021.
[11] OGASAWARA S,AKAGI H. Analysis of variation of neutral point potential in neutral-point-clamped voltage source PWM inverters[C]// Industry Applications Society Meeting, 1993, Conference Record of the. IEEE, 1993:965-970.
[12] 宋强, 刘文华,严干贵,等. 基于零序电压注入的三电平NPC逆变器中点电位平衡控制方法[J]. 中国电机工程学报, 2004, 24(5):57-62.
[13] DAI S. A DSP controlled multi-level inverter providing DC-link voltage balancing, ride-through enhancement and common-mode voltage elimination[D]. Oregon State University,2003.
[14] 钟皖生, 张国月, 吴越,等. 一种新型的三电平逆变器中点电位平衡控制策略[J]. 电气传动,2014,44(8):19-22.
[15] 刘璋玮,刘锋, 梅生伟,等. 扩张状态观测器在双馈风机虚拟惯量控制转速恢复中的应用[J]. 中国电机工程学报, 2016, 36(5):1207-1217.
[16] 吴斌, 卫三民. 大功率变频器及交流传动[M]. 北京:机械工业出版社, 2008.
