基于自抗扰控制的PMSM直接转矩控制研究
2017-04-01祁世民窦晓华
祁世民,周 臻,窦晓华,3,王 永
(1.中国科学技术大学,合肥 230027;2.解放军63893部队,洛阳 471003;3.酒泉卫星发射中心,兰州 732750)
基于自抗扰控制的PMSM直接转矩控制研究
祁世民1,2,周 臻1,窦晓华1,3,王 永1
(1.中国科学技术大学,合肥 230027;2.解放军63893部队,洛阳 471003;3.酒泉卫星发射中心,兰州 732750)
针对传统的永磁同步电机(PMSM)空间矢量调制-直接转矩控制(SVM-DTC)存在转矩脉动大以及PID参数整定繁琐等缺点,介绍了一种基于自抗扰控制(ADRC)的PMSM直接转矩控制方法。通过设计ADRC控制器,对电机运行过程中的扰动进行观测和补偿,提高了电机转速的控制精度,降低了转矩脉动。仿真和实验结果验证了方法的可行性和有效性。
永磁同步电机;直接转矩控制;自抗扰控制;空间矢量调制
0 引 言
20世纪80年代中期,德国学者M.Depenbrock教授首次提出直接转矩控制(以下简称DTC)[1]。随后,直接转矩控制以其转矩响应迅速,控制性能对电机参数变化不敏感等优点受到了大量关注。传统的直接转矩控制策略使用两个滞环比较器对磁链和转矩分别进行控制,控制性能依赖滞环的带宽,同时存在转矩脉动大、逆变器开关频率不恒定等缺点。
针对传统DTC存在的问题,众多学者对其进行改进并做了大量的研究。E.Ozkop等将空间矢量调制策略应用到直接转矩控制中,即SVM-DTC策略[2]。随后J.Yuan等将双闭环结构的SVM-DTC控制策略应用到感应电机调速中[3]。该策略使用两个PI调节器替代了转矩环和磁链环的滞环比较器,转矩与磁链PI调节器的输出作为参考电压矢量,再通过空间矢量调制的方法控制逆变器开关信号进而驱动电机。该方法不仅利用有限的电压矢量,而是利用矢量调制的方法调制参考电压矢量,解决了开关频率不恒定的问题。但是由于速度环、磁链环、转矩环均采用PID控制,使得参数的整定变得复杂繁琐,且时常面临超调与快速性之间的矛盾。自抗扰控制是由中国科学院系统科学研究所韩京清研究员提出的控制策略[4],自抗扰控制将系统中的模型不确定性以及外部扰动看成总的扰动,通过设计扩张状态观测器(以下简称ESO)对总的扰动进行观测并对其进行补偿,控制性能优异,鲁棒性强。
针对以上问题,本文提出了一种基于自抗扰控制的PMSM直接转矩控制策略,将自抗扰控制与SVM-DTC策略相结合,通过设计转矩环、磁链环自抗扰控制器,将电机运行过程中的参数不确定性以及外部扰动看成总的扰动并进行观测和补偿,提高了电机转速的稳态控制精度,降低了电磁转矩与定子磁链脉动。仿真和实验结果表明,这种新型的直接转矩控制拥有更优异的控制性能。
1 PMSM数学模型
为建立三相永磁同步电机的数学模型,先作如下假设以简化分析:
(1)转子永磁材料电导率为零,磁导率与空气相同;
(2)忽略铁心磁阻,不计涡流损耗和磁滞损耗;
(3)永磁体上无阻尼绕组;
(4)转子转动产生的感应电动势呈正弦分布;
(5)永磁体与三相绕组产生的磁场在气隙中均呈正弦分布。
在上述假设的基础上,根据电机学理论,建立在定子磁链同步旋转坐标系(M-T旋转坐标系)下的永磁同步电机数学模型如下[5]:
式中:|ψs|为定子磁链的幅值;ψα与ψβ为定子磁链在两相静止坐标系α,β轴上的投影;Rs为定子绕组电阻;uM,uT为定子电压在M-T旋转坐标系M,T轴上的分量;iM,iT为定子电流在M,T轴上的分量; ωs为电角速度;ωr为机械角速度;p为电机极对数; Te为电机提供的电磁转矩;Tl为外界的负载转矩;J为转动惯量;B为转子转动时的摩擦阻尼系数。
2 PID SVM-DTC控制系统
将式(4)代入式(3),可得:
由式(2)可以看出,通过控制uM的大小可以改变定子磁链的幅值,因此可以设计控制律uM,使得定子磁链的幅值|ψs|为恒定值。而由式(6)可以看出,当|ψs|为恒定值时,uT与Te之间呈线性关系,即可以通过控制uT来控制电磁转矩Te的大小进而控制转子的机械角速度。而|ψs|的稳态精度越高,|ψs|就越接近常值,uT与Te之间的线性关系就越好,因此定子磁链幅值的脉动会影响电磁转矩的控制性能。这就是双闭环结构SVM-DTC控制的基本原理,称之为PID SVM-DTC控制策略。


图1 PID SVM-DTC控制框图
3 ADRC SVM-DTC控制系统
以图1的控制结构为基础,利用自抗扰控制技术分别对速度环、磁链环PI调节器进行改进。下面进行速度环ADRC控制器设计,由PMSM运动式(5)可得:
式中:
将f扩张为新的状态,即x1=ωr, x2=f。这样式(7)变为:
则利用自抗扰控制中扩张状态观测器(以下简称ESO)的设计方法得到观测器如下:
再取:

合理的安排参数k0就可以使跟踪误差信号e1无限接近于0,即实现对参考速度信号的跟踪。
在永磁同步电机调速控制中,电机期望到达的参考速度信号通常为阶跃信号,而电机的初始速度为0,这就使得在电机的起动阶段电机转速与期望转速之间的误差较大,容易引起初始控制律过大,使起动电流过大从而造成安全隐患,也容易引起转速的超调和振荡。自抗扰控制中的跟踪微分器(TD)可以很好地解决这个问题,根据实际需要,设计二阶线性跟踪微分器如下:

图2 TD输入输出特性曲线
图3是速度环ADRC控制器的控制框图,其中TD模块是按照式(14)设计的跟踪微分器;LESF模块是按照式(12)对误差的线性组合;ESO模块是按照式(10)设计的扩张状态观测器,扩张的状态z2用于扰动的补偿。
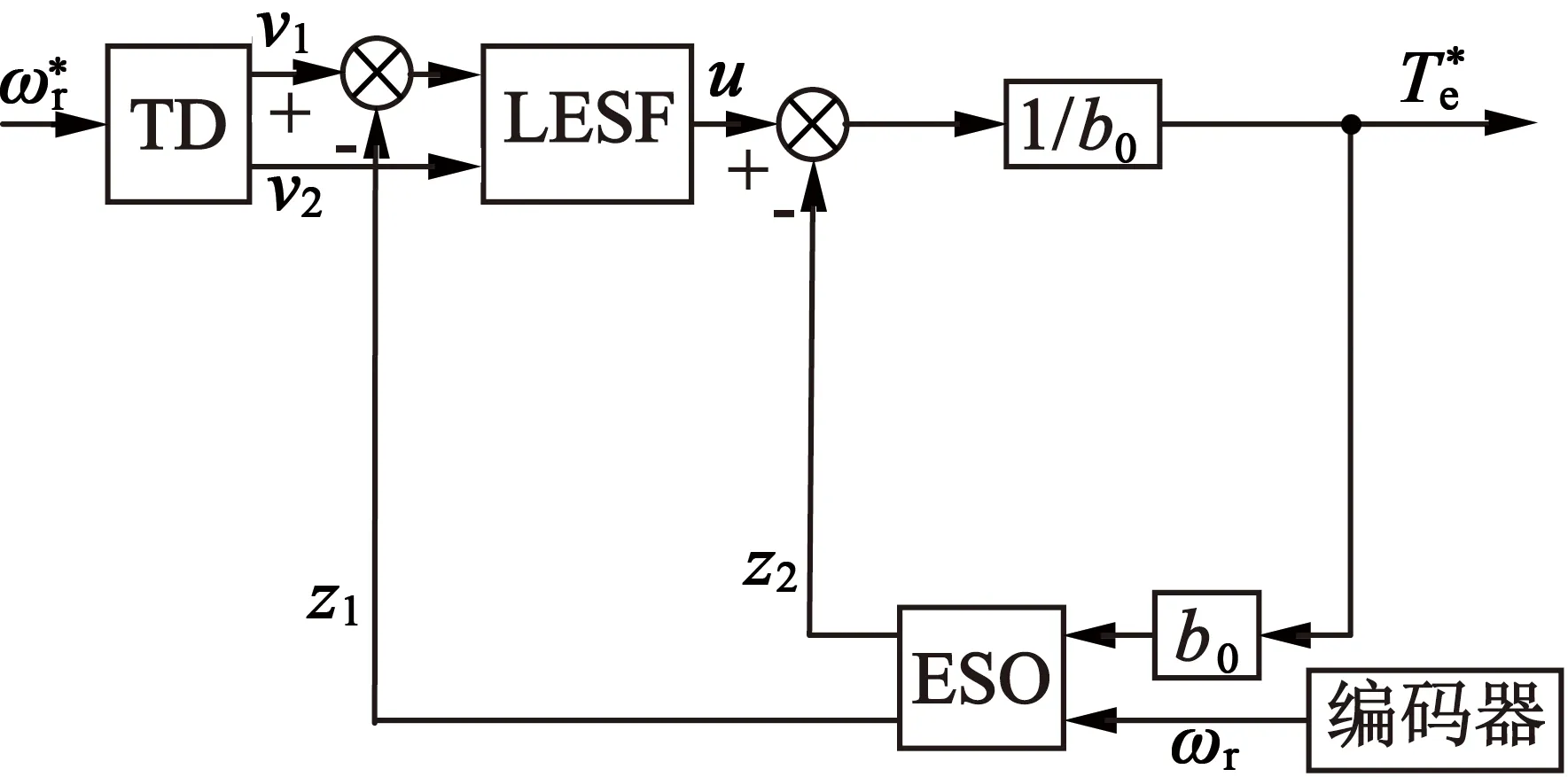
图3 速度环ADRC控制框图同理,式(2)可以转化
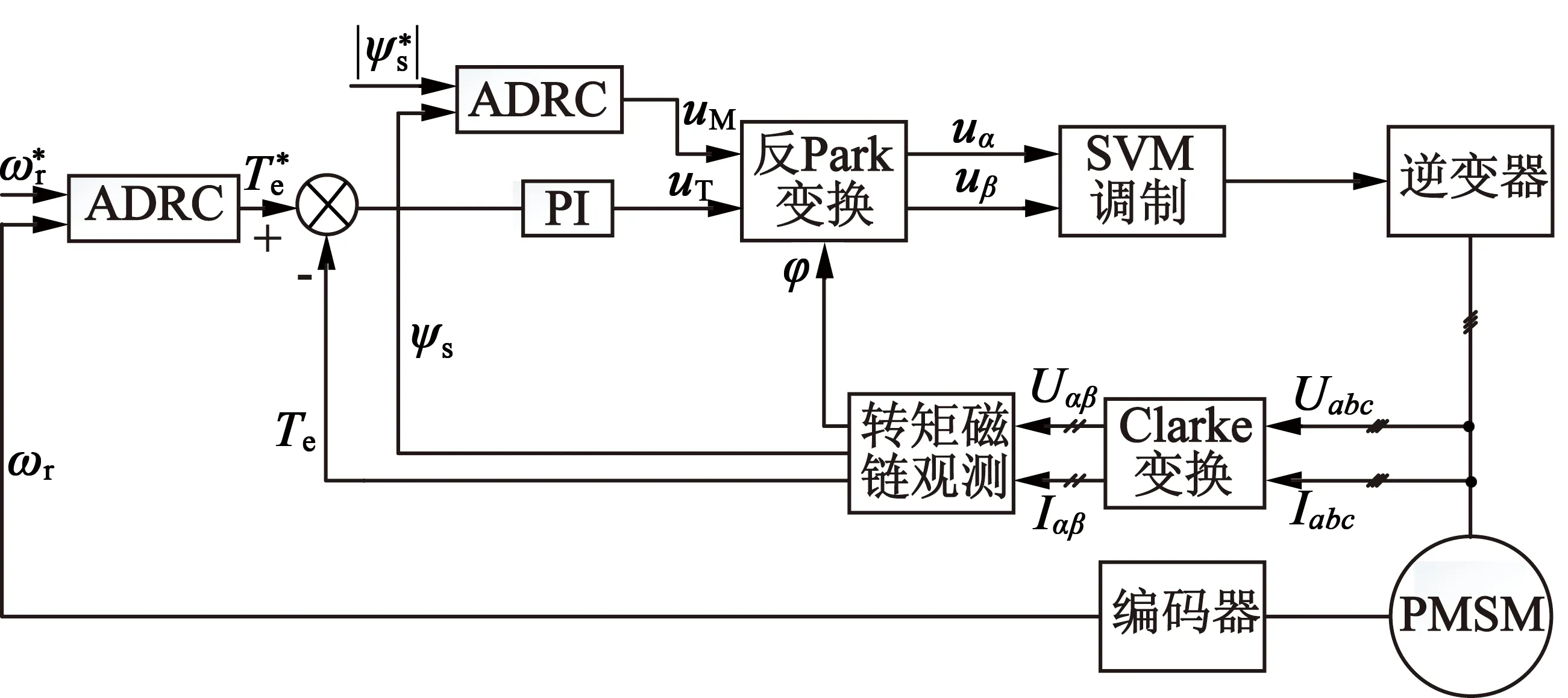
图4 ADRC SVM-DTC控制框图
4 仿真和实验结果
为了验证本文控制策略的可行性和有效性,利用MATLAB/Simulink搭建仿真模型分别对两种方法进行仿真[7],为方便进一步的实验验证,仿真中的电机参数与实验平台中的伺服电机参数一致,具体参数见表1。
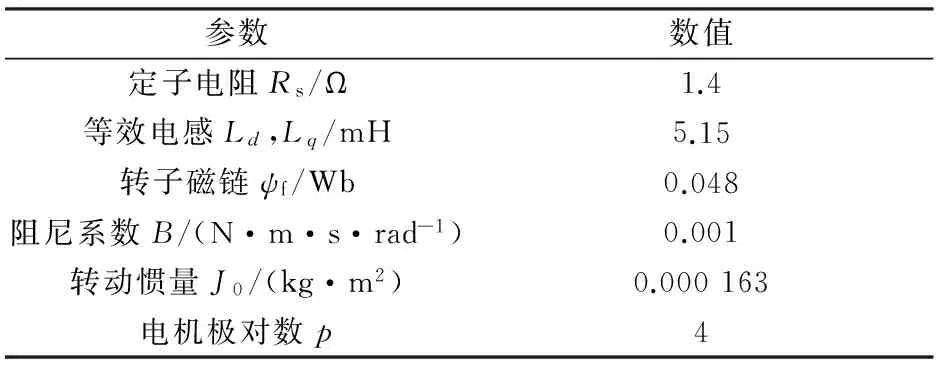
表1 仿真实验电机参数
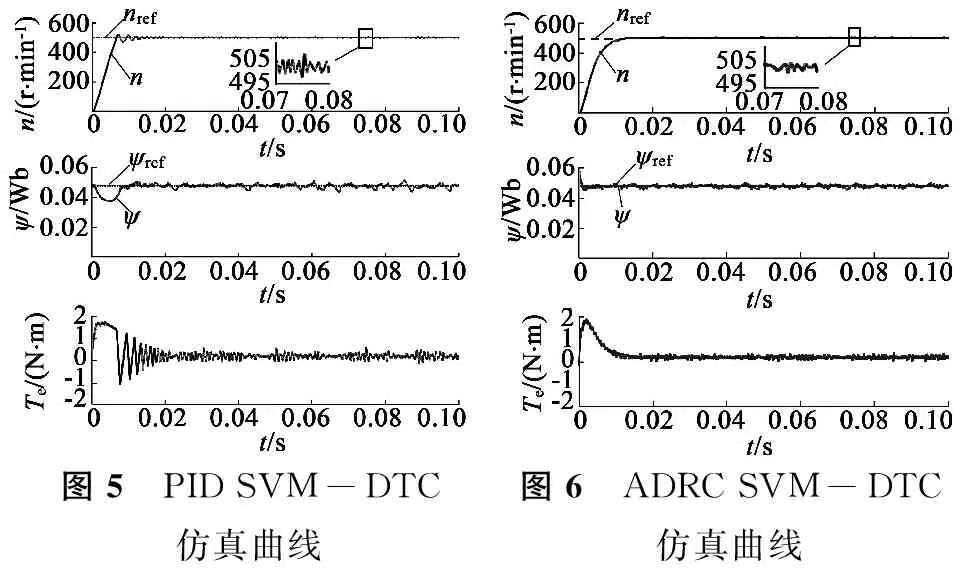
图5 PIDSVM-DTC仿真曲线图6 ADRCSVM-DTC仿真曲线
为验证算法的有效性,在实验平台上分别验证两种算法,实验平台以TI公司的DSP TMS 320F28377D为控制核心,电机为登奇GK6032伺服电机,具体参数见表1,实验平台装置如图7所示。
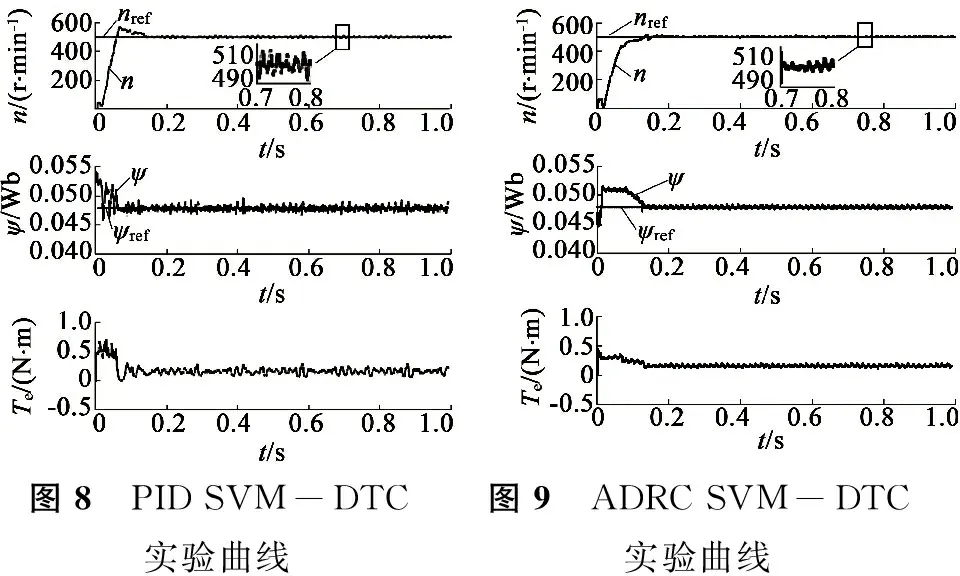
图8 PIDSVM-DTC实验曲线图9 ADRCSVM-DTC实验曲线
5 结 语
本文研究了基于ADRC的永磁同步电机直接转矩控制,针对PID SVM-DTC控制策略下定子磁链和电磁转矩脉动大以及PID参数整定繁琐的问题,分别设计了速度环与磁链环ADRC控制器。仿真和实验结果表明,ADRC SVM-DTC控制策略解决了电机转速的超调和振荡问题,拥有更高的稳态精度,同时,电磁转矩与定子磁链的脉动也显著降低,有一定的实际应用价值。
[1] DEPENBROCK M.Direct self-control (DSC) of inverter-fed induction machine[J].IEEE Transactions on Power Electronics,1988,3(4):420-429.
[2] OZKOP E,OKUMUS H I.Direct torque control of induction motor using space vector modulation (SVM-DTC) [C]//Power System Conference,Aswan,2008:368-372.
[3] YUAN Jing,MA Xigeng,LIU Jiannan.Simulation research of induction motor based on SVM-DTC with three-level Inverter[C]//Electronics Information and Emergency Communication,Beijing,2015:410-413.
[4] 高志强.自抗扰控制思想探究[J].控制理论与应用,2013,30(12):1498-1510.
[5] CHAPMAN S J.电机学[M].第5版.北京:电子工业出版社,2012:125-165.
[6] 王成元,夏加宽,杨俊友,等.电机现代控制技术[M].1版.北京:机械工业出版社,2006: 161-164.
[7] 赵辉,胡仁杰.SVPWM的基本原理与应用仿真[J].电工技术学报,2015,30(14):350-353.
Research on Direct Torque Control of PMSM Based on Active Disturbance Rejection Control
QIShi-min1,2,ZHOUZhen1,DOUXiao-hua1,3,WANGYong1
(1.University of Science and Technology of China,Hefei 230027,China; 2.63893 Troops of PLA, Luoyang 471003,China; 3.Jiuquan Satellite Launching Center,Lanzhou 732750,China)
For permanent magnet synchronous motor (PMSM), aiming at the disadvantage of the traditional space vector modulation direct torque control (SVM-DTC), such as the large torque ripple and the complexity of PID parameter tuning, a PMSM direct torque control method based on active disturbance rejection control (ADRC) was proposed. By designing the ADRC controller to observe and compensate the disturbance, the torque ripple was reduced and the control precision of the motor speed was improved. Simulation result and experimental results verify the feasibility and effectiveness of the method.
PMSM; direct torque control(DTC); ADRC; space vector modulation
2016-01-09
TM341,TM351
A
1004-7018(2017)02-0042-04
祁世民(1991-),男,硕士研究生,研究方向为电机控制。
