模糊PID在收卷张力控制系统中的应用研究
2017-03-29刘洪晴刘斌斌
陈 耀,陈 霞,王 震,高 健,徐 悦,刘洪晴,刘斌斌
(山东科技大学 电气与自动化工程学院,山东 青岛 266000)
模糊PID在收卷张力控制系统中的应用研究
陈 耀,陈 霞,王 震,高 健,徐 悦,刘洪晴,刘斌斌
(山东科技大学 电气与自动化工程学院,山东 青岛 266000)
通过对原纸卷绕中张力控制系统的分析,针对常规PID控制在原纸张力控制过程中难以实现参数整定、抗干扰能力弱等问题,提出了基于模糊PID控制方法。文中在常规张力控制系统的基础上加入模糊控制算法,并通过Matlab仿真,对基于常规PID和模糊PID的张力控制系统性能进行仿真比较,证明了该方法应用到原纸张力控制系统中,能使系统响应速度加快,抗干扰能力增强,具有良好的稳态性。
收卷;张力控制;模糊PID
目前国内生产线上的原纸张力控制系统,普遍存在由于张力控制不当引起的原纸塑性变形、断裂、起皱等问题,造成用纸量浪费严重,产品质量不均匀,质量差等问题[1]。
现有原纸张力控制系统还存在采用人工方式调节张力,由于人工调节不易随时调节张力,使得张力在一个较大的范围内上下波动,难以保证产品质量[2]。常规PID控制方法虽然结构和算法简单,但人工调节张力控制系统的方法在实时性和稳定性上存在严重不足,由于在生产过程中的机械等因素的扰动,使得系统的性能受到影响。文中利用模糊控制PID对张力控制系统进行优化,与常规PID张力控制系统相比,模糊PID张力控制系统的实时性和鲁棒性有显著的提高,在原纸生产线中有较好的应用前景。
1 原纸收卷系统
1.1 原纸收卷系统工作原理
本收卷张力控制系统由两段闭环张力直接控制,每段均有浮辊张力检测传感器检测张力,张力值送给各段的张力控制器处理后再传给工作变频器,控制导辊电机的转速来调整卷材的线速度,线速度的变化引起张力的变化,实现对张力的控制[3-5]。张力控制结构图1如下。
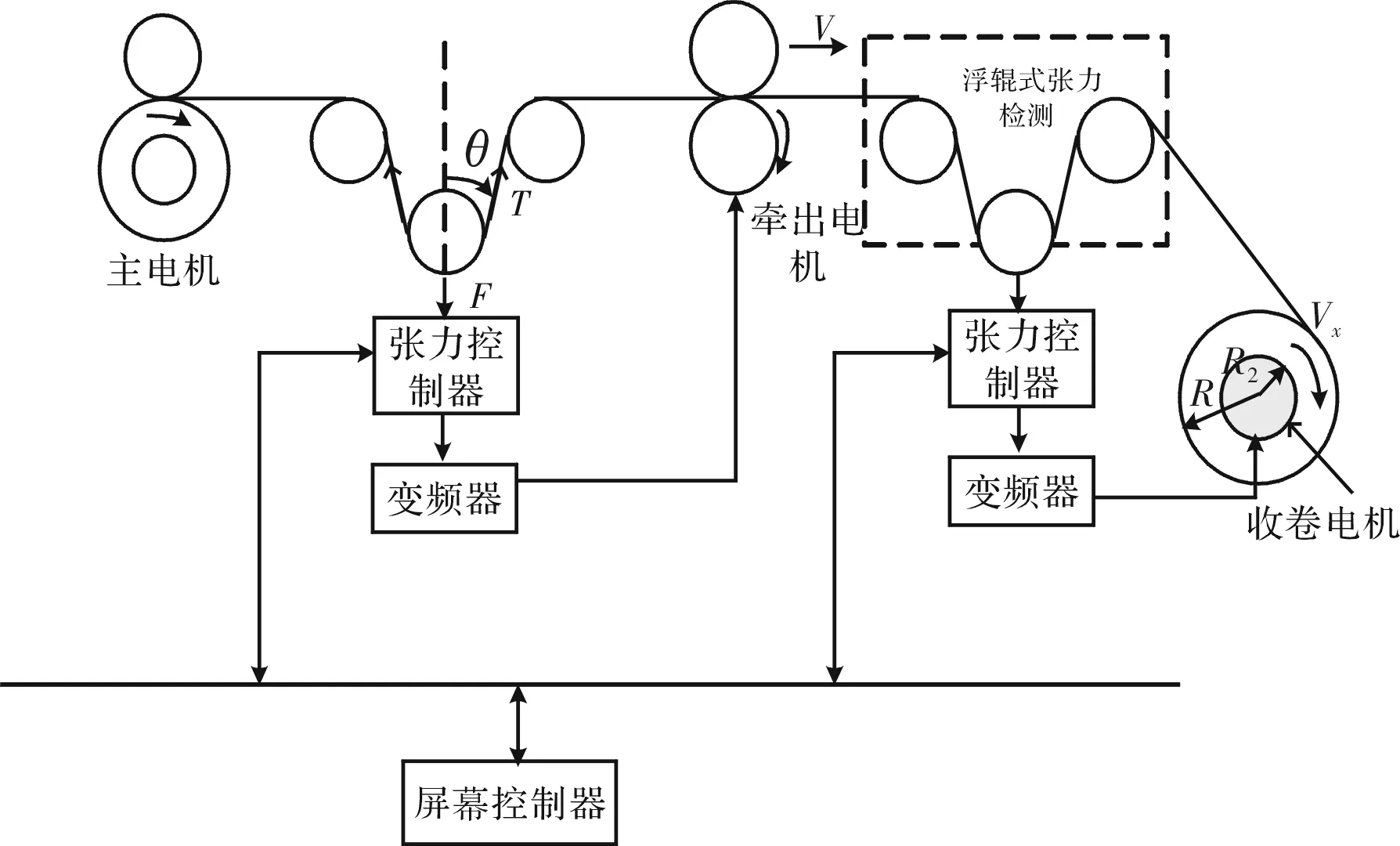
图1 张力控制结构图
1.2 张力控制和收卷辊动态性能分析
由胡克定律得[6],卷纸内的张力T
(1)
式(1)中,A是卷材的横截面积;ε是杨氏弹性模量;L是传动点之间的距离;VR是收卷筒的线速度;t是纸张传送时间。由公式可见,纸张在作为张力调节对象时,是一个积分环节。在启动过程中令VR>V,以使纸张产生一定的张力,当纸张达到所要求的张力后,应该及时调节使VR稳定,这样纸张才能在此张力下稳定运行。
纸卷在收卷过程中,纸张受到收卷电机的拉力、摩擦力和制动力矩作用,其关系满足
(2)
式中,J为纸卷的转动惯量。
带卷的转动惯量J由卷带材料和芯轴两部分组成,其计算公式为
(3)

2 张力控制系统框图
本系统为多电机控制的控制系统,在纸机中主要存在两种多电机的同步控制结构。这里采取等状态同步控制,该结构线路简单,容易实现,着重系统的跟踪性能,启动时不存在速度滞后问题,跟随性能好,当存在负载扰动时,同步性能会受到一定的影响。
通过构建张力控制系统的原理框图,对张力控制系统的调节原理进行分析[7-9]:本系统有两个闭环反馈环节,一个是电机速度反馈调节系统(ASR);另一个是张力反馈调节系统(ATR)。对于速度反馈调节,有系统检测实时速度值作为反馈,构成速度闭环,再通过ASR来调节电机的控制电压,从而达到调节电磁转矩的目的[10-12]。对于张力控制,系统通过张力传感器检测实时张力,构成张力闭环,再由ATR来调节速度增量,从而改变ASR的设定速度,其控制框图如图2所示。

图2 张力控制系统结构框图
3 模糊PID控制系统
3.1 模糊PID控制设计
常规PID控制策略在实际中应用较为广泛,但在不同的误差E和误差变化率EC下无法满足对PID参数的自整定要求,从而影响控制效果的进一步提高。将模糊控制与传统PID控制结合,则能实现对PID的3个参数的在线自整定[13-14]。将张力控制系统设计成在线自调整PID参数KP、KI、KD的模糊控制器,其基本结构如图3所示。

图3 模糊PID控制系统结构
模糊PID控制系统由模糊控制器和PID控制组成,其中模糊控制是系统实现的核心[15]。其主要包括模糊化接口、模糊推理、清晰化接口和知识库等4个部分。该系统实现自调整PID参数的计算公式
3.2 输入输出量的模糊化及其参数调整原则
在模糊PID控制系统中,选择偏差E及偏差变化率EC为输入语言变量,论域为[-10,10],其中ΔKp的论域为[-6,6],ΔKi的论域为[-2,2],ΔKd的论域为[-2,2]。将E、EC、ΔKp、ΔKi及ΔKd离散化为7个等级,分别为负大、负中、负小、零、正小、正中、正大,简写为NB、NM、NS、0、PS、PM、PB。根据模糊推理规则对参数进行修改,以满足不同E和EC时对控制参数的不同要求。
4 仿真与性能分析
4.1 系统仿真模型的建立
依据模糊控制PID控制系统原理,利用Matlab软件提供的Simulink工具箱和模糊逻辑工具箱,建立如图所示的系统仿真模型,模型中的张力控制系统采用模糊PID控制器,对电机采用转矩矢量控制进行建模,如图4所示。经过不断的调控制器的初始参数,得到Kp、Ki、Kd的初始参数。
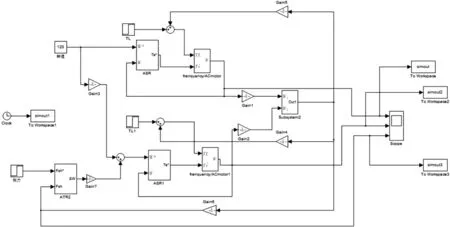
图4 张力控制系统仿真图
4.2 仿真结果及其分析
(1)当张力控制系统采用常规PID控制时,其仿真结构图如图5,张力仿真波形如图6所示;

图5 常规PID仿真模型
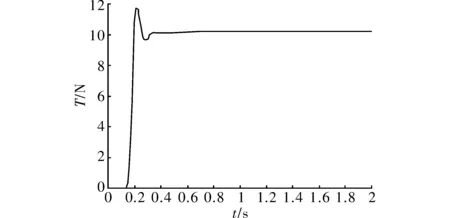
图6 常规PID张力控制仿真模型
(2)当张力控制系统采用模糊PID控制时,其模糊PID仿真结构如图7所示,张力控制系统仿真波形如图10所示,电机的波形图如图8和图9所示。
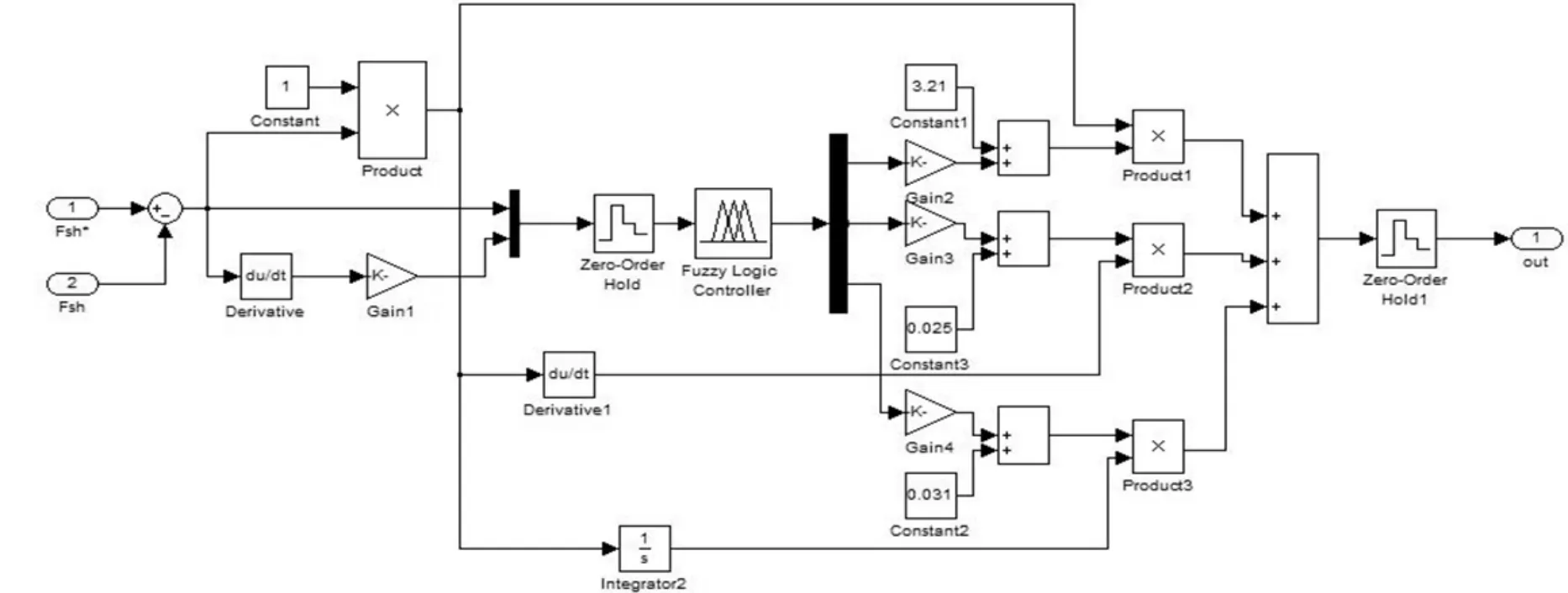
图7 模糊PID控制仿真模型
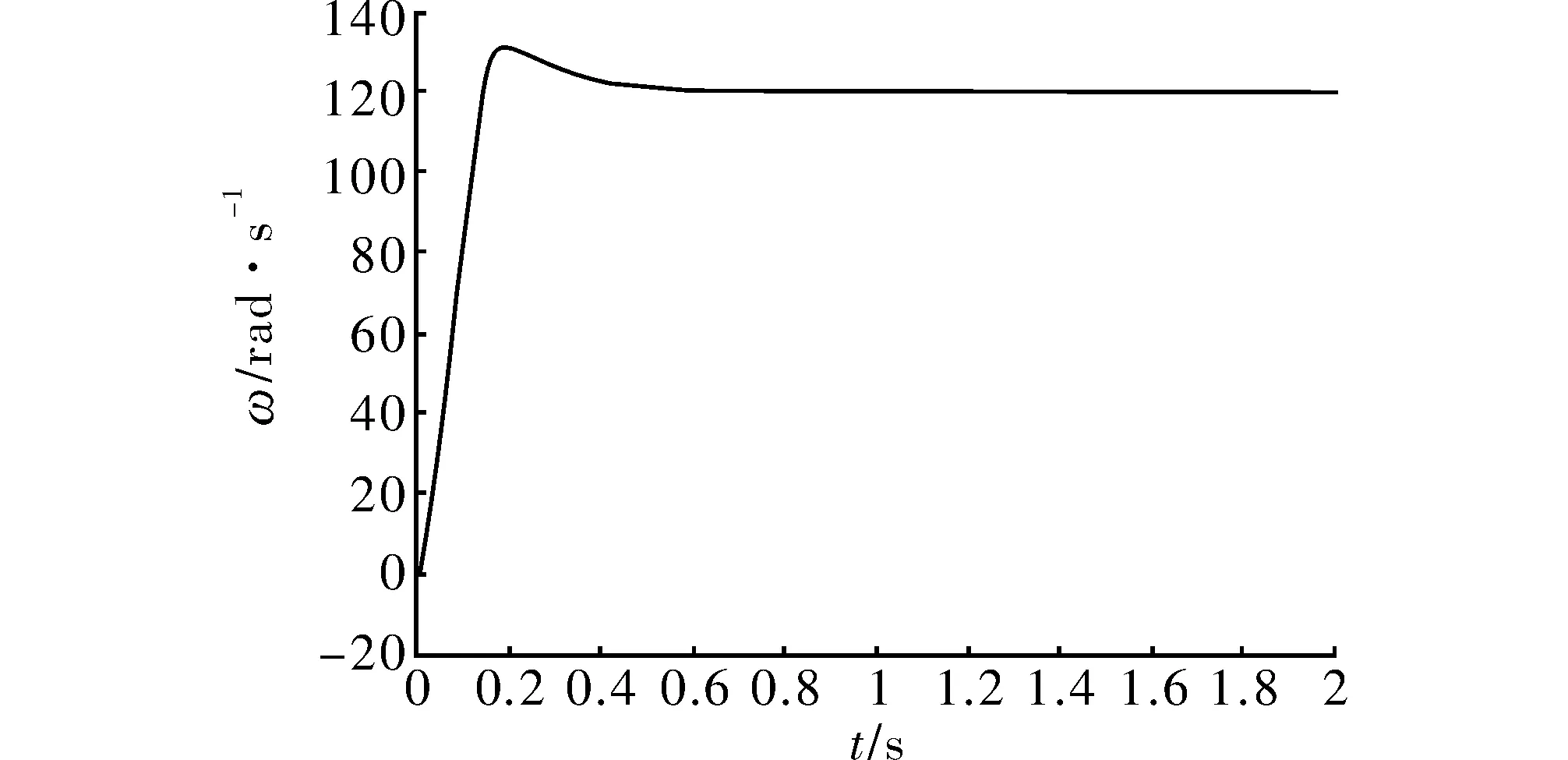
图8 牵出电机转速
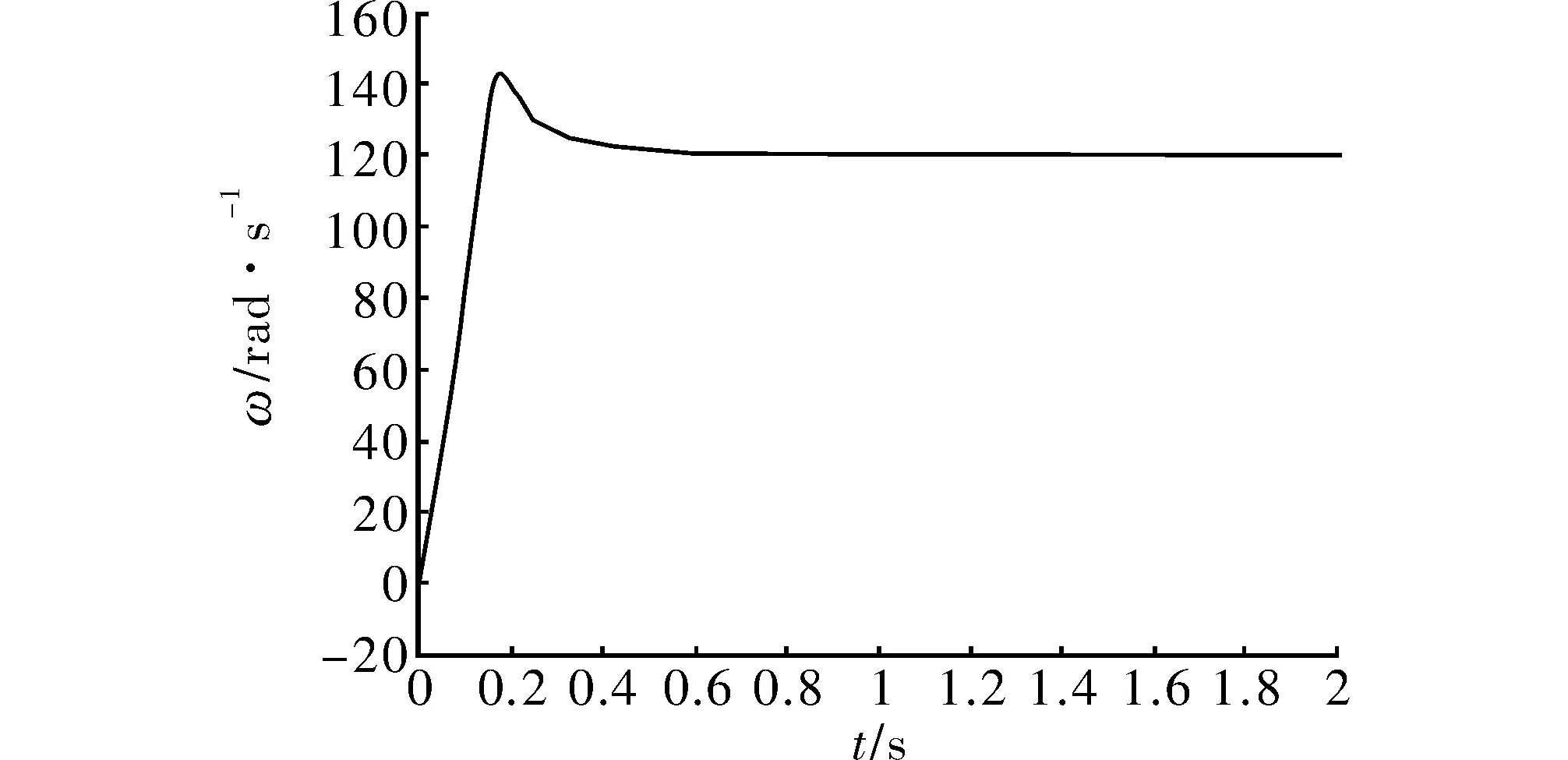
图9 收卷电机转速

图10 模糊PID控制仿真波形图
5 结束语
本系统的控制对象是要求实时快速检测、快速响应的环节,在其控制规律上有其自身的特点。本文将模糊推理控制器和PID控制器的优点集于一身,即将专家经验有效的应用到了实时PID参数中,又保持了传统PID控制结构简单的优点。文中将其应用到收卷机的控制改造中,仿真运行证明,卷取质量大幅提高。
[1] 陈永红,朱从乔,李京,等.关于一种变参数PID控制器的分析与研究[J].微机计算机信息,2005,21(18):47-48.
[2] 张文武,程良伦.基于遗传算法的瓦楞纸生产原纸张力控制研究[J].仪表技术与传感器,2012(4):81-84.
[3] 陈曦.造纸机分部传动多电机同步控制系统研究[D].济南:山东大学, 2009.
[4] 张莹.基于模糊参数自整定PID的凹印机张力控制系统[J].渭南师范学院学报,2013,28(9):33-36.
[5] 李伟,王友权,董继先,等.自调整PID控制在卷取张力中的设计与仿真[J].包装工程,2014(11):67-70.
[6] Thiffault C,Sicard P,Bouscayrol A.Tension control loop using a line actuator based on the energetic macroscopic representation[J]. IEEE Canadian Conference on Electrical & Computer Engineering, 2004(4):2041-2046.
[7] 陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2004.
[8] 张亚东.基于PLC的造纸机自动控制系统设计与研究[D].合肥:合肥工业大学,2012.
[9] 闫娟,杨慧斌,程武山.基于模糊PID的穿丝机张力控制系统设计[J]. 机械设计与制造,2015(9):174-177.
[10] 钟亮,包能胜,于文平.模糊自适应PID控制在凹版印刷机收卷张力控制中的应用[J].轻工机械,2012,30(4):65-68.
[11] 茹锋,高小嵩,薛钧义.复卷机的卷取控制策略及性能分析[J].电气传动,2001,31(2):23-27.
[12] 张莉,李彦明,马培荪,等.基于模糊PID控制器的多电机同步控制装置的应用[J].工业仪表与自动化装置,2003(4):11-13.
[13] 窦艳艳,钱蕾,冯金龙.基于Matlab的模糊PID控制系统设计及仿真[J].电子科技,2015,28(2):119-122.
[14] Yang Mei,Zhang Shaoru.The research of tention control system in web press based on the fuzzy adaptive PID controller[C].Shanghai:IEEE Conference on Industrial Electronics & Appineering,2014.
[15] Okada K,Sakamoto T.An adaptive fuzzy control for web tention control system[C].Japan:Conference of the IEEE Industrial Electronics Society, 1998.
Fuzzy PID Application in the Winding Tension Control System Research
CHEN Yao,CHEN Xia,WANG Zhen,GAO Jian,XU Yue,LIU Hongqing,LIU Binbin
(School of Electrical Engineering and Automation, Shandong University of Science and Technology,Qingdao 266000, China)
Through the analysis of the base paper in the winding tension control system, in view of the conventional PID control is hard to realize in the process of base paper tension control parameters setting, the problem such as anti-jamming capability is not strong.The paper increase the fuzzy PID tension control system on the basis of the tension control system .through Matlab simulation, the performance of the conventional PID and fuzzy PID are simulation compared,the method is applied to paper tension control system, can make the system response speed, anti-interference ability, good steady state.
roll-up; tension control; fuzzy PID control
2016- 03- 17
陈耀(1989-),男,硕士研究生。研究方向:电力电子与电力传动,自动控制。陈霞(1968-),女,副教授,硕士生导师。研究方向:电力电子,控制工程。
10.16180/j.cnki.issn1007-7820.2017.01.022
TP273+.4
A
1007-7820(2017)01-080-04
