机器人辅助腹腔镜肾部分切除术:单一术者99例经验总结
2017-03-27王昕凝罗光达刘圣圳卢锦山
王昕凝 罗光达 刘圣圳 祖 强 卢锦山 张 磊 张 旭 董 隽
(中国人民解放军总医院泌尿外科,北京 100853)
·临床研究·
机器人辅助腹腔镜肾部分切除术:单一术者99例经验总结
王昕凝①罗光达 刘圣圳 祖 强 卢锦山 张 磊 张 旭 董 隽*①
(中国人民解放军总医院泌尿外科,北京 100853)
目的 探讨机器人辅助腹腔镜肾部分切除术(robot-assisted laparoscopic partial nephrectomy,RALPN)的有效性、安全性。 方法 回顾性分析2013年8月~2015年12月单一术者应用da Vinci机器人系统完成的99例RALPN临床资料。肿瘤直径1.5~8 cm,中位数3.0 cm。 结果 99例手术均成功完成,无中转开放手术。手术时间55~150 min,平均72.5 min;手术出血量10~200 ml,平均76 ml;肾动脉阻断时间8~28 min,平均21 min;术后引流管拔除时间2~11 d,平均3.1 d。术后病理提示99例切缘均为阴性,其中透明细胞癌80例,嫌色细胞癌2例,乳头状肾细胞癌4例,颗粒细胞癌1例,多房囊性肾细胞癌1例,后肾腺瘤1例,肾囊肿3例,血管平滑肌脂肪瘤4例,嗜酸细胞瘤3例。随访时间5~20个月,平均11个月,1例T1期肾癌术后1年脑转移死亡,余均无局部复发、远处转移。 结论 RALPN是一种安全可靠的手术方式。
机器人手术系统; 肾部分切除术; 肾肿瘤
目前认为体积较小的T1期肾脏肿瘤更适合选择肾部分切除术,其长期疗效与根治性肾切除术相同[1],由于肾功能得到了更好的保护,肾部分切除术长期疗效甚至优于根治性肾切除术[2]。机器人手术系统于21世纪初进入泌尿外科手术领域[3],随着机器人手术系统在国内大医院逐步推广应用,早期肾肿瘤患者又多了一种治疗选择。2013年8月~2015年12月单一术者应用da Vinci机器人系统成功完成99例机器人辅助腹腔镜肾部分切除术(robot-assisted laparoscopic partial nephrectomy,RALPN),现将结果报道如下。
1 临床资料与方法
1.1 一般资料
本组99例,男81例,女18例。年龄22~79岁,中位数51岁。BMI 20.4~30.9,中位数25.6。94例为体检发现肾占位,4例有单侧腰部不适或疼痛,1例有间歇性肉眼血尿。术前CT或MRI提示右侧占位60例,左侧占位39例;肿瘤位于下极54例,中极36例,上极12例,其中4例单肾多发占位,2例双肾占位(本次仅行单侧肾部分切除术);肿瘤最大直径1.5~8 cm,中位数3.0 cm。6例有腹腔手术史。术前均行相关检查除外远处转移及评估肿瘤分期,术前R.E.N.A.L评分,低危(4~6分)33例,中危(7~9分)52例,高危(10~12分)14例。均以“肾脏占位”收入院。
病例选择标准:T1期肿瘤,对侧肾功能不良或解剖性孤立肾T2期肿瘤,适合肾部分切除术,全身状态可以耐受手术,经济条件许可,首选机器人辅助腹腔镜肾部分切除术。
1.2 手术方法
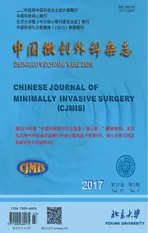
静脉麻醉诱导后常规气管插管,复合吸入麻醉。健侧斜卧45°体位,患侧腰部抬高。常规消毒术野皮肤并留置尿管,铺无菌巾单。患侧脐斜上方2 cm做12 mm切口用于机器人系统镜头孔,镜头孔上方分别于患侧锁骨中线肋缘下、患侧麦氏点皮肤做切口标记,为机器人系统第1、2臂机械臂孔,于镜头孔内侧和正下方5 cm处分别做5 mm切口标记为辅助孔。插入trocar后注入CO2,气腹压14 mm Hg(1 mm Hg=0.133 kPa),分别于各皮肤标记处插入相应trocar,将手术系统机械臂移入位,分别置入镜头、单极弯剪(第1臂)、双极剪钳(第2臂),辅助孔内置入吸引器等器械。镜下观察腹腔内解剖结构,于结肠旁沟切开侧腹膜,并将结肠向内侧牵拉,进入后腹腔,分离后腹腔与肾周筋膜间隙。打开肾周脂肪囊后,沿肾中部后方及腰大肌前游离至肾门处,游离出肾动脉(图1)。置入无损伤血管夹,阻断肾动脉。将肿瘤连同5 mm左右正常肾实质边缘一并切除。用0号倒刺线将肾实质创面基底部连续缝合,并用Hem-o-lok加固缝线(图2)。去除无损伤血管夹,恢复肾脏血供,将肿瘤置入取物袋取出。检查术野无活动出血,切口置入引流管一根。逐层缝合各切口。
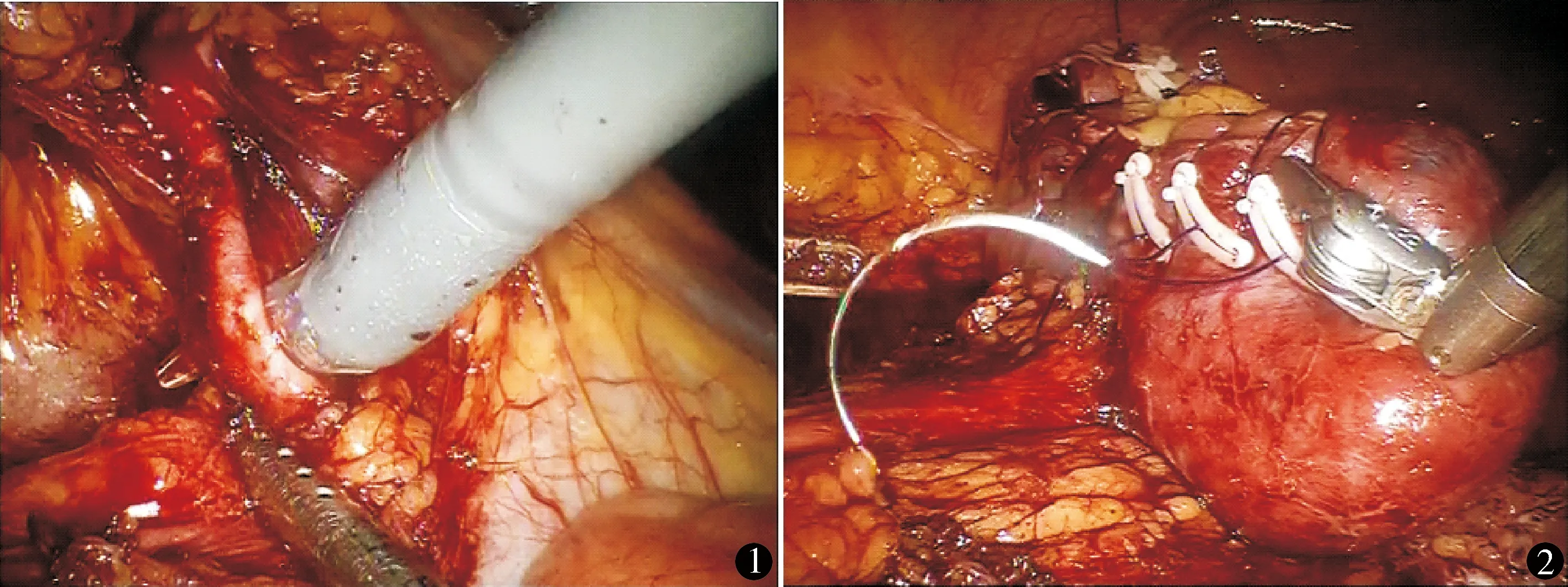
图1 暴露肾动脉 图2 缝合肾脏创面
2 结果
99例手术均成功完成,无中转开放手术。手术时间(不含术前机器人准备时间)55~150 min,平均72.5 min,其中前30例平均手术时间83 min,后30例平均手术时间69 min;手术出血量10~200 ml,平均76 ml;肾动脉阻断时间8~28 min,平均21 min;术后引流管拔除时间2~11 d,平均3.1 d。术后1~2 d可下地活动。术后并发症2例,均为术后第1天肾脏出血,输血后行选择性肾动脉栓塞术出血停止。术后病理提示恶性88例,包括透明细胞癌80例,嫌色细胞癌2例,乳头状肾细胞癌4例,颗粒细胞癌1例,多房囊性肾细胞癌1例,术后分期均为T1期;良性11例,包括后肾腺瘤1例,肾囊肿3例,血管平滑肌脂肪瘤4例,嗜酸细胞瘤3例。切缘均为阴性。99例随访5~20个月,平均11个月,1例T1期肾癌术后1年脑转移死亡,余均无局部复发、远处转移。
3 讨论
腹腔镜肾部分切除术(laparoscopic partial nephrectomy,LPN)因为创伤小、术后疼痛较轻、术中失血较少[4]等优势,已取代开放性肾部分切除术成为治疗T1期肾肿瘤的首选术式[5]。普通腹腔镜手术的局限性在于:①二维成像对组织位置及器械深度辨别较难;②长柄器械无法弯曲,腔内操作尤其是缝合打结难度较大;③腹腔镜技术学习曲线较长[6]。机器人辅助腹腔镜系统的应用,减少手术中操作的困难,弥补普通腹腔镜手术的局限,减小复杂手术的创伤[7]。
2004年,Gettman等[8]首先报道13例达芬奇机器人系统的RALPN,手术全部获得成功,术后病理提示切缘均为阴性,随访2~11个月无肿瘤复发。Wu等[9]的meta分析显示,与开放手术相比,RALPN在围手术期并发症、手术失血量、术后住院时间等方面均有显著优势。Andrade等[10]报道单中心110例RALPN的远期疗效,5年总生存率、无瘤生存率、肿瘤特异性生存率分别为91.1%、97.8%和97.8%,提示RALPN有着良好的远期疗效。Choi等[11]对RALPN与LPN进行对比分析,认为RALPN在热缺血时间、手术时间以及出血量等方面效果明显优于LPN。
机器人辅助腹腔镜手术优势在于:①镜头稳定,且具备3D视野,能够清晰呈现出组织器官的解剖结构及血管走行;② 7个活动度的仿腕型器械可以轻易做出腹腔镜长柄器械难以做出的动作,同时机器人系统的减震滤颤效果也可以简化操作难度,易于缝合和切除,从而减少失血量及阻断时间[6];③术者无需持续站立操作,可以减轻术者疲劳;④相比普通腹腔镜手术,机器人辅助腹腔镜手术的学习曲线较短,易于掌握[12]。何威等[13]报道,即使是高难度复杂的肾肿瘤也可以使用RALPN,效果优于传统腹腔镜。本组术者具备11年腹腔镜手术经验,接受机器人手术系统培训后,在完成7例机器人辅助腹腔镜根治性肾切除术基础上,开展RALPN,前3例手术热缺血时间分别为15、18、22 min,无切缘阳性和并发症发生,99例热缺血时间平均21 min,说明有腹腔镜手术经验的泌尿外科医生经过短期学习可掌握RALPN,并很快达到稳定水平。
虽然经验丰富的泌尿外科医生开展此类手术并不困难,但从手术安全考虑,初期宜选择相对容易的病例,术前进行R.E.N.A.L.评分有助于评价手术操作难度[14]。R.E.N.E.L.评分系统包含肿瘤的腹背位置,而根据肿瘤部位制定相应手术入路做到个体化治疗是精准医学需要,这样既可降低手术难度,提高手术安全性,又可减少手术时间。实践中我们体会,经腹腔途径处理肾脏背侧或上极肿瘤时,肿瘤位置较深难以探及,需完整游离整个肾脏,手术难度较大,而肾脏下极及腹侧肿瘤较易暴露。我院2015年报道[15]机器人辅助后腹腔镜肾部分切除术,对于肾脏背侧或上极肿瘤具有良好的手术效果。我们认为肾下极及腹侧肿瘤首选经腹腔入路,肾上极及肾脏背侧肿瘤首选经后腹腔入路。后腹腔入路局限性包括:后腹腔空间有限,手术开始阶段操作较困难,且容易损伤腹膜[16],但随着肾脏游离范围的增大,操作空间会逐渐增大,手术操作反而相对容易。由于后腹膜较为特殊,建议RALPN初学者首选腹腔入路。
尽管机器人辅助腹腔镜手术有许多优势,但目前尚较难在国内大范围开展,原因包括:①机器人系统体积过大,不能随意调整,术中较难改变体位或改变手术方法;②机器人手术尚未纳入我国医保范围[17],相较普通腹腔镜手术,机器人辅助腹腔镜手术花费明显增高[18];③达芬奇机器人系统缺乏触觉反馈,增加了手术中精细操作的难度,尤其是在打结时,结扎线易拉断或松脱,这对于初学者是一个不小的挑战。相信随着机器人系统的发展,以及术者手术经验的增加,以上问题都会解决。
综上所述,经腹腔入路的RALPN是一种安全有效的手术方式,对肾脏腹侧及肾脏下极肿瘤优势更加明显,易于掌握。
1 Motzer RJ,Jonasch E,Agarwal N,et al.Kidney cancer,version 3.2015.J Natl Compr Canc Netw,2015,13(2):151-159.
2 Gill IS,Kavoussi LR,Lane BR,et al.Comparison of 1,800 laparoscopic and open partial nephrectomies for single renal tumors.J Urol,2007,178(1):41-46.
3 Abbou CC,Hoznek A,Salomon L,et al.Remote laparoscopic radical prostatectomy carried out with a robot. Report of a case.Prog Urol,2000,10(4):520-523.
4 Becker A,Pradel L,Kluth L,et al.Laparoscopic versus open partial nephrectomy for clinical T1 renal masses:no impact of surgical approach on perioperative complications and long-term postoperative quality of life.World J Urol,2015,33(3):421-426.
5 Yu HY,Hevelone ND,Lipsitz SR,et al.Use,costs and comparative effectiveness of robotic assisted,laparoscopic and open urological surgery.J Urol,2012,187(4):1392-1398.
6 吴国辉,梁朝朝,周 骏,等.机器人辅助、3D及传统腹腔镜在保留肾单位手术中的对比研究.中国内镜杂志,2015,21(11):1121-1125.
7 Khalifeh A,Autorino R,Hillyer SP,et al.Comparative outcomes and assessment of trifecta in 500 robotic and laparoscopic partial nephrectomy cases:a single surgeon experience.J Urol,2013,189(4):1236-1242.
8 Gettman MT,Blute ML,Chow GK,et al.Robotic-assisted laparoscopic partial nephrectomy:technique and initial clinical experience with da Vinci robotic system.Urology,2004,64(5):914-918.
9 Wu Z,Li M,Liu B,et al.Robotic versus open partial nephrectomy:a systematic review and meta-analysis.PLoS One,2014,9(4):e94878.
10 Andrade HS,Zargar H,Caputo PA,et al.Five-year oncologic outcomes after transperitoneal robotic partial nephrectomy for renal cell carcinoma.Eur Urol,2016,69(6):1149-1154.
11 Choi JE,You JH,Kim DK,et al.Comparison of perioperative outcomes between robotic and laparoscopic partial nephrectomy:a systematic review and meta-analysis.Eur Urol,2015,67(5):891-901.
12 Lavery HJ,Small AC,Samadi DB,et al.Transition from laparoscopic to robotic partial nephrectomy:the learning curve for an experienced laparoscopic surgeon.JSLS,2011,15(3):291-297.
13 何 威,谢 欣,芮文斌,等.R.E.N.A.L评分在机器人辅助肾部分切除术中的应用.临床泌尿外科杂志,2014,29(11):954-956.
14 廖文峰,马潞林,卢 剑,等.R.E.N.A.L.肾脏肿瘤评分系统在肾脏肿瘤手术治疗中的临床应用价值分析.中国微创外科杂志,2013,13(7):592-596.
15 黄 双,吕香君,张 旭.机器人辅助后腹腔镜肾部分切除术(附21例报道).微创泌尿外科杂志,2015,4(3):129-132.
16 吕香君,张 旭,马 鑫.经后腹腔入路机器人肾部分切除术手术经验和临床疗效总结(附单中心189例病例报道).微创泌尿外科杂志,2016,5(2):65-68.
17 何 威,谢 欣,钟 山,等.机器人辅助腹腔镜手术650例的临床经验:来自上海瑞金医院的报告.临床泌尿外科杂志,2016,31(1):9-14.
18 Boger M,Lucas SM,Popp SC,et al.Comparison of robot-assisted nephrectomy with laparoscopic and hand-assisted laparoscopic nephrectomy.JSLS,2010,14(3):374-380.
(修回日期:2016-08-18)
(责任编辑:王惠群)
Robot-assisted Laparoscopic Partial Nephrectomy for Renal Mass: Experience of 99 Cases by the Same Performer
WangXinning,LuoGuangda*,LiuShengzhen*,etal.
*DepartmentofUrology,ChinesePLAGeneralHospital,Beijing100853,China
DongJun,E-mail:jdong@medmail.com.cn
Objective To discuss the safety and feasibility of robot-assisted laparoscopic partial nephrectomy (RALPN). Methods A retrospective study was made on 99 patients treated by RALPN with the da Vinci system from August 2013 to December 2015 by the same performer. The tumor was 1.5-8 cm in diameter (median, 3.0 cm). Results The RALPN was successfully accomplished in all the 99 cases, and no conversion to open surgery was required. The mean operative time was 72.5 min (range, 55-150 min), the mean hemorrhage was 76 ml (range, 10-200 ml), the mean renal ischemic time was 21 min (range, 8-28 min), and the mean time of drainage was 3.1 days (range, 2-11 days). Postoperative pathological examinations showed negative resection margins in all the cases, including 80 cases of renal clear cell carcinoma, 2 cases of chromophobe renal cell carcinoma, 4 cases of papillary renal cell carcinoma, 1 case of renal granulosa cell carcinoma, 1 case of multilocular cystic renal cell carcinoma, 1 case of metanephric adenoma, 3 cases of nephrocytosis, 4 cases of angiomyolipoma and 3 cases of oncocytoma. A follow-up for 5-20 months (mean, 11 months) was carried out. No patients got relapse or metastasis except one died of brain metastasis after 1 year.Conclusion RALPN is a safe and reliable operation.
Robotic surgery system; Partial nephrectomy; Renal tumor
A
1009-6604(2017)03-0206-04
10.3969/j.issn.1009-6604.2017.03.004
2016-06-23)
*通讯作者,E-mail:jdong@medmail.com.cn
①(中国人民解放军总医院海南分院泌尿外科,三亚 572000)