某型飞机驾驶杆LVDT传感器信号调理校正
2017-03-27杜天军黄世超刘书国毛文杰
杜天军,黄世超,刘书国,毛文杰
(中国人民解放军95430部队,成都 610081)
某型飞机驾驶杆LVDT传感器信号调理校正
杜天军,黄世超,刘书国,毛文杰
(中国人民解放军95430部队,成都 610081)
飞机驾驶杆LVDT(LVDT)传感器信号测试校正在航空测控研究领域具有十分重要的意义,提出了一种针对某型飞机驾驶杆LVDT传感器信号精确调理校正方法;介绍了飞机驾驶杆LVDT传感器原理,分析了AD598 LVDT调理芯片的使用局限,利用最小二乘法设计了精确调理校正方法;基于VC++2010开发环境,利用高精度的模拟校正源产生模拟激励校正信号,设计了驾驶杆LVDT多通道软件自校正方法,它可以有效提高解调电路的线性度和对称性,克服了AD598常规调理电路的使用局限,从而实现驾驶杆LVDT信号精确检测;理论分析与数值试验验证了所提方法的正确性和有效性。
驾驶杆;LVDT信号;最小二乘法;线性度
0 引言
飞机驾驶杆是飞机上用来传递操纵指令和各种传感器电信号,驱动飞机舵面运动的多个装置总和,用于飞机飞行姿态的控制[1-4],它的工作性能是否良好正常,直接影响着飞机性能的正常发挥和飞行安全。某型飞机作为我国目前的主要机种,其驾驶杆配置的是带有四余度的电传操纵系统。该型飞机驾驶杆中,在俯仰(也称纵向)、滚转(也称横向)、偏航3个方向共配置有12个线位移LVDT(线性位移差分变压器,Linear Variable Differential Transformer)传感器[1],主要用于感受和测量飞机在3个方向的杆位移和电气性能参数大小。LVDT 是一种机械-电子传感器, 其输入是磁芯的机械移动, 输出是与磁芯位置成正比的交流电压信号,利用驾驶杆LVDT传感器输出的信号去控制舵机,使飞机的舵面产生所需要的偏转角, 从而达到操纵飞机的目的。因此,驾驶杆LVDT传感器是飞机操纵和飞行控制系统前端重要的信息源,必须定期进行性能检测,确保飞行安全。
在实际工程运用中, 通常采用AD 公司生产的集成LVDT信号处理芯片AD598或AD698进行LVDT信号解调处理[5-9]。 AD598/ AD698自身集成了内部振荡器、电压基准, 仅需少量几个外围无源元件就能完成对LVDT传感器的激励和信号解调处理, 并直接输出与位移成正比的直流电压, 芯片集成度高, 电路设计极为方便。但是在其使用过程中,由于零位偏移补偿电路的影响、滤波放大电路的影响、或者由于温度、湿度、噪声、电磁干扰等原因的影响,会影响解调电路的线性度和对称性,仅仅靠对AD598外围无源器件进行调整修正不能有效改善线性度和对称性,进而影响LVDT信号的检测精度。
本文首先介绍驾驶杆LVDT传感器原理,分析AD598 LVDT调理芯片的原理和使用局限,然后利用最小二乘法设计精确调理校正方法,基于VC++2010开发环境,利用高精度的模拟校正源产生模拟激励校正信号,设计了驾驶杆LVDT多通道软件自校正的方法,可以有效提高解调电路的线性度和对称性,从而克服AD598常规调理电路的使用局限,实现驾驶杆LVDT信号精确调理检测,极大提高测试精度。
1 驾驶杆LVDT传感器及调理电路
1.1 驾驶杆LVDT传感器
LVDT 是一种机械-电子传感器[5-9],由一个初级线圈和二个次级线圈组成,初级线圈由外部参考正弦波信号源激励,二个次级线圈反向串联。活动磁芯的移动可改变初次级线圈之间的耦合磁通,从而产生二个幅值不同的交流电压信号。串联次级线圈的输出电压随着磁芯移离中心位置而升高,通过测量输出电压的电压可以判断磁芯移动的方向和大小。LVDT主要用于对线位移/角位移进行测量,具有精度高、线性度高、重复性好等特点,在航空科技中,广泛应用于对驾驶杆位置、驾驶杆角度、油门杆位置、喷口位置等线/角位移进行精确测量控制。
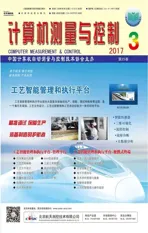
该型飞机驾驶杆中,在俯仰、滚转、偏航3个方向配置有12个线位移LVDT传感器,主要用于感受和测量飞机在3个方向的杆位移大小。LVDT传感器具有输出稳定,抗干扰性强的特点,驾驶杆电传操纵装置中的大部分传感器均采用LVDT差分放大传感器形式,LVDT为线位移传感器,RVDT为角位移传感器,其原理大致一致,如图1所示 。
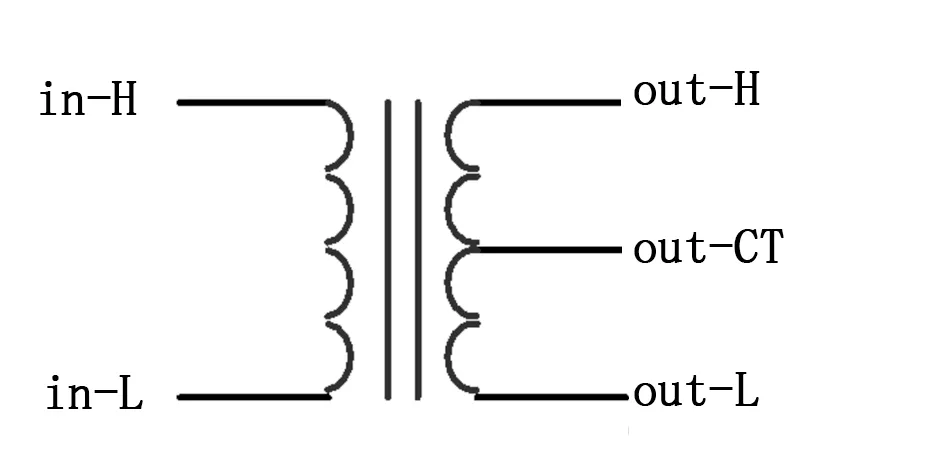
图1 LVDT差分放大传感器原理示意图
左侧为初级绕组,即输入端;右侧为次级绕组,即输出端,中间为磁芯。H-CT部分绕行方向与输入侧相同,L-CT部分绕行方向与输入侧相反,当初级绕组和次级绕组之间没有相对位移时,U(out)H_CT与U(out)L_CT电压值相同,故总输出U(out)H_CT-U(out)L_CT为零,当初级绕组和次级绕组之间有相对位移时,U(out)H_CT与U(out)L_CT即不为零,U(out)H_CT-U(out)L_CT的大小即反映出位移的大小。
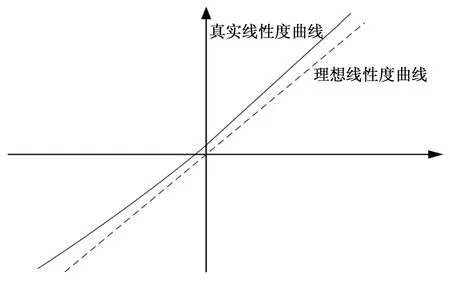
在图1中,右侧输出为0~10 V的交流信号,以out_H和out_L端的电压分析为例,UH-L的电压输出为-10 V∽10 V(负值表示Uout_H 1.2 信号调理电路 利用AD598为基础构建该型飞机驾驶杆LVDT信号调理电路。如图2所示,AD598首先驱动LVDT,然后读出LVDT的输出电压并产生一个与磁芯位置成正比的直流电压信号。AD598 通过内部的低失真正弦振荡器产生一个固定频率、固定幅值的正弦波, 经放大后作为激励信号驱动LVDT的初级线圈,再通过可移动的磁芯耦合到LVDT 串联的两个次级线圈上,产生两个同频率的正弦波(VA,VB)。LVDT的磁芯与其所感应的机械位移形成一定的硬连接关系,当磁芯发生位移时,两个次级线圈耦合到的正弦波的幅值发生变化,且(VA-VB)正比于磁芯位移即外部机械位移。AD598通过同步测VA与VB的幅值之差,在内部进行(VA-VB) /(VA+VB) 的运算,运算结果经滤波器滤波后,通过运算放大,输出一个与位移成正比的电压Vout。 图2 AD598工作原理图 图3是AD598调理LVDT传感器的具体连接电路示意图。在具体使用过程中,相关元器件的关键参数选择如下[6-7]: (1)选择激励信号频率来决定C1 C1=35μFHZ/fEXCITATION (1) (2)根据外围电阻R1来确定调节激励信号的幅值。AD598可以产生频率从20Hz到20kHz,幅值为2Vrms到24Vrms的正弦波激励信号,具体R1与VEXC的对应关系在AD598器件手册中有一个曲线图表,可以查找利用,这里不再赘述。本文采用的激励信号为8Vrms/2 000Hz信号,R1=1.4kΩ。 (3)选择输出电压Vout来决定R2 (2) 其中:S为灵敏度;d为满刻度磁芯位移,单位为inch;VPRI为典型激励情况下的参考电压,一般由器件制造商在器件手册中说明;VA+VB为典型激励情况下,磁芯在中立位置VA=VB情况下的和值,一般由器件制造商在器件手册中说明。例如,针对Schaevitz公司AD598E100芯片,采用其常用的Vout=±5V输出范围,则有: (3) (4)选择R3、R4来调整偏置电压Vos。 (4) 图3 AD598调理LVDT连接电路示意图 2.1 调理电路局限 虽然AD598/AD698LVDT处理芯片使用简单、芯片集成度高、电路设计方便,但存在以下使用局限: 1)总误差(包括温度、湿度、噪声、增益、增益漂移及输入失调电压漂移):满度0.6%;增益误差:满度0.4%;漂移误差:满度0.3%(以上参数详见AD598器件使用手册)。如果按照输出电压Vout=±10V计算,则对应的总误差、增益误差、漂移误差分别达到60mV、40mV、30mV,而该型飞机驾驶杆LVDT的性能检测要求精度达到±15mV,因此必须对AD598调理电路进一步高精度调理校正,否则难以满足精度要求。 2)由公式(4)可以看出,偏置电压VOS与R2、R3、R4相关,R2与输出电压Vout相关,Vout大则R2大,进而VOS变大。理想的信号调理电路,如果没有特殊要求,尽量要求VOS趋近于0值,以使得调理电路具有良好的线性度和对称性。因此,一般选择Vout=±5V输出范围,减小R2对VOS影响;选择R3趋近于R4,减小R3、R4对VOS影响。然而,在实际使用过程中,由于环境、温度、湿度、噪声、电磁干扰等因素的影响,R3不可能完全等同于R4,偏置电压VOS始终会存在,因此必须对AD598调理电路进一步高精度调理修正,否则难以满足精度要求。 3)综合以上分析,以及由于传感器本身特性和调理电路的本身特性并不是完全遵从0起点的线性关系,造成调理电路在实际使用过程中线性度和对称性差,必须修正参数以提高解调电路的线性度和对称性,否则会产生极大的系统误差。如图4所示,理想的调理电路输入输出线性度曲线如虚线所示,但实际应用中可能会由于温度、湿度、噪声、电磁干扰等原因出现如图所示的真实线性度曲线,必须对其进行输入输出曲线校正,以使得其接近理想线性度曲线,提高测试精度。 图4 调理电路线性度误差示意图 线性度和对称性是信号调理电路和LVDT差分传感器放大电路的重要指标。如果调理电路和放大电路的线性化程度差,则其传递的数据变化差异很大,即没用的信号,对后续信号处理无任何意义。因此,线性度是解调电路线性特性的最客观重要标准,直接影响线性回归方程的求解和最终测量精度。 2.2 利用最小二乘法实现单个LVDT调理通道高精度校正 采用了最小二乘法曲线拟合来修正单个通道调理系统误差[10-11]。假设调理电路的输入输出满足以下多项式: (5) 其误差为: (6) 在此处要求解a0,a1,…,an,使得误差Q最小,则公式(6)中Pn(xi)代表的真实线性度曲线会无限接近公式(6)中f(xi)代表的理想线性度曲线,wi为权值。根据求极值的方法,并参考文献[10-11]的思路,在公式(6)中分别对a0,a1,…,an求偏导,再使得偏导数为零,则得到a0,a1,…,an应满足如下方程组: (7) 整理方程组(7)并用矩阵表示可得到如下方程: (8) 求解公式(8)所示的方程组,可得到a0,a1,…,an,代入公式(5)即可得到最小二乘拟合多项式。针对LVDT传感器调理电路,线性度的偏差主要由乘性噪声和加性噪声引起,故本文设定电压输入输出函数为一次函数即可: y=ax+b (9) 则有: (10) (11) (12) 2.3 利用软件自校正来实现驾驶杆LVDT多通道调理高精度校正 在本文的调理电路和软件系统设计中,基于最小二乘法原理,利用软件自校正来实现驾驶杆LVDT多通道调理高精度校正。如图5所示,利用一个高精度模拟LVDT来产生图1中的次级绕组输出电压,利用测试校正线将输出电压信号引入对应的校正通道,AD598处理芯片选择Vout=±5V输出范围以尽量降低总误差和偏置电压的影响。利用高精度模拟LVDT产生输出电压Va-b=Va-Vb(差值电压)和Va+b=Va+Vb(和值电压)(如图5所示),以0.1V为间隔,在(0VAC,+9VAC)的范围内,依次接入差值电压Va-b交流信号,记作公式(12)中的xi,利用数据采集卡测定图5调理电路板卡的输出端Vout,记作公式(12)中的yi,由此得到90组数据,可以重复进行多次测量以增加最小二乘拟合的精确性,则利用公式(12)即可求出拟合公式(9)。拟合公式求出后,在实际测试中,当系统对俯仰LVDTA进行测试时,AD采集单元测得某一数值后,即可利用拟合公式反向求出俯仰LVDTA的真实输出Va-b,对Va-b进行数据分析,即可判定该型飞机驾驶杆俯仰LVDTA的性能。本文基于VC++2010开发环境,设计了软件自校正的方法,利用高精度的模拟校正源产生模拟激励校正信号,利用测试校正导线将信号引入对应的校正通道,则软件自动基于最小二乘法原理对通道的工作参数进行校正。 图5 驾驶杆LVDT多通道调理高精度校正 利用本文构建的驾驶杆LVDT信号多通道调理参数校正方法对LVDT进行了测试校正试验,测试结果如图7所示。在图7中,当调理电路输入电压I分别为6.99 V、4.995 V、3.129 V、0.949 V时,驾驶杆纵向A/B/C/D 4个LVDT信号通道的调理输出分别如图6~7所示,其中垂直方向的0.000~50.000是为了便于观察分析的放大显示值,不考虑也不影响线性度的计算。试验结果显示了经过多通道软件自校正后,解调电路系统具有极好的线性度和对称性,具体分析如下:在图6中,以A通道为例,当输入I分别为6.99 V、4.995 V、3.129 V、0.949 V时,A通道的解调输出分别为9.217 V、6.589 V、4.128 V、1.251 V,可以大致估算线性度如下:9.217/6.99≈1.318 6;6.589/4.995≈1.319 1;4.128/3.129≈1.319 2;1.251/0.949≈1.318 3;可以得出以上线性度之间的最大误差为:1.319 2-1.318 3=0.000 9;如果以输入7.5 V为例(因为7.5 V*1.319 2≈9.89 V接近采集卡最高采样电压值10 V),则有输出最大误差7.5 V*0.000 9=6.75 mV,6.75 mV 远小于系统±15 mV的精度要求;在图6中,B、C、D通道也可以得出上述类似结果,由此可以看出:经过多通道软件自校正后,解调电路系统线性度良好。在图7中,显示的是解调电路系统良好的对称性,如图所示,输入某一电压后,采集到A、B、C、D通道的正向输出电压分别为9.217 V、9.216 V、9.210 V、9.219 V,正向电压反映在图3、图5中即Va>Vb,这时候利用导线将输入电压反向接入解调电路系统,采集到A、B、C、D通道的反向输出电压分别为9.213 V、9.215 V、9.207 V、9.220 V(注:反向输出电压实际为负值,此处为了直观反映对称性而取其绝对值进行分析),对应的最大误差为9.217 V-9.213 V=4 mV,由此可见:经过多通道软件自校正后,解调电路系统对称性良好。 图6 纵向调理电路线性度曲线测试结果 图7 纵向调理电路对称性曲线测试结果 经过前述的LVDT多通道调理高精度校正方法之后,可以利用校正后的LVDT调理电路构建该型飞机驾驶杆电气性能检测系统,进行驾驶杆LVDT信号性能测试。具体驾驶杆LVDT性能测试软件使用方法,这里不再赘述。 飞机驾驶杆操纵装置LVDT传感器信号测试校准在航空测控研究领域具有十分重要的意义,本文介绍了驾驶杆LVDT传感器原理,分析了AD598 LVDT调理芯片的原理和使用局限,利用最小二乘法设计了精确调理校正方法,基于VC++2010开发环境,利用高精度的模拟校正源产生模拟激励校正信号,设计了驾驶杆LVDT多通道软件自校正的方法,可以有效提高解调电路的线性度和对称性,从而实现驾驶杆LVDT信号精确调理检测。理论分析与数值试验验证了本文所提方法的正确性和有效性。 [1] 某型飞机技术手册[Z]. 成都:中航工业成都飞机设计研究所,2006. [2] 贺 松,陆安江,张正平. 基于LabVIEW的某型歼击机驾驶杆力标定系统设计[J]. 微计算机信息, 2009,25(6):103-104. [3] 彭 嫚. 基于LABVIEW的教练机驾驶杆测量系统研究[D]. 贵阳:贵州大学, 2008. [4] 蒋红娜,朱 丽,冯铭瑜. 飞机驾驶杆(盘)力系统现场测试校准技术研究[J]. 国外电子测量技术,2016,5(5):88-90. [5] 王敬亭,廖力清,凌玉华. AD698 型LVDT信号调理电路的原理与应用[J]. 国外电子元器件,2005,9:63-64. [6] Analog Devices Inc. DataSheet, Universal LVDT Signal Conditioner AD698[Z]. 2006. [7] Analog Devices Inc. DataSheet, Universal LVDT Signal Conditioner AD598[Z]. 2002. [8] 江 澄,彭立志,孙健国. 航空发动机数控系统中LVDT传感器信号处理及在线故障检测[J]. 航空动力学报, 2007,22(8): 1397-1400. [9] 李 勇,张俊安. 一种LVDT 信号调理电路的研究[J]. 微电子学, 2007,37(3):320-325. [10] 王伟斌,邱长泉. 基于最小二乘曲线拟合的信号调理电路误差补偿方法[J]. 计算机测量与控制, 2009, 17(11): 2286-2288. [11] Timothy Sauer著,裴玉茹,马赓宇译. 数值分析[M]. 北京:机械工业出版社, 2014. LVDT Sensor Signal Conditioning and Calibration Method for a Certain Type Airplane Control Stick Du Tianjun,Huang Shichao,Liu Shuguo,Mao Wenjie (Army 95430 of PLA, Chengdu 610081, China) This paper proposed a LVDT (Linear Variable Differential Transformer) signal conditioning and calibration method for a certain type fighter airplane control stick. Aimed at the airplane control stick LVDT signals, a conditioning and calibration method based on least squares method was founded via introducing the principles of LVDT sensor, and via analyzing the principles and limitation of AD598;a software self-calibration method which calibrate the multichannel LVDT signals was designed based on VC++ 2010, linearity and symmetry of signal conditioning circuit was improved effectively,and then detection precision of system was improved too. Theoretical analysis and experiment results show that the proposed method is effective for stick LVDT signal conditioning and calibration. airplane control stick;LVDT signal;least squares method;linearity 2016-09-27; 2016-11-02。 杜天军(1974-),男,四川阆中人,博士,高级工程师,主要从事自动测试系统和机载设备故障诊断方向的研究。 1671-4598(2017)03-0240-04 10.16526/j.cnki.11-4762/tp.2017.03.065 V241.06 A

2 调理电路局限及精确调理实现

3 试验与分析

4 结论