基于软件接收机的卫星导航信号模拟器性能指标测试
2017-03-27欧国标
欧国标,路 辉
(北京航空航天大学 电子信息工程学院,北京 100191)
基于软件接收机的卫星导航信号模拟器性能指标测试
欧国标,路 辉
(北京航空航天大学 电子信息工程学院,北京 100191)
针对卫星导航信号模拟器的性能指标测试评估问题,提出了基于软件接收机的性能指标测试方法;通过分析模拟器性能,包括对动态性能、相位噪声、通道间时延一致性和静态定位精度的综合分析,给出了相应的测试方法和测试流程,并结合卫星导航信号模拟器产生的实际信号对各项性能指标的测试结果进行分析;经测试结果表明,软件接收机可以有效地对卫星导航信号模拟器各项性能指标进行测试,测试结果符合理论预期,满足模拟器性能指标测试评估的需求。
卫星导航信号模拟器;性能指标;软件接收机
0 引言
卫星导航接收机应用于高精尖技术领域时,其输出测量数据的准确性、可靠性至关重要。然而实际应用中,实际信号的各种参数以及测试环境的局限性,导航接收机的测试和计量直接依赖于卫星导航信号模拟源提供的技术指标,为保证日益增长的接收机设备测试需求和正确可靠评估的需要,在卫星导航应用测试系统建设过程中,建立标准的、完善的卫星导航信号模拟源指标测量方法极其重要。它的建立,首先能够满足导航信号模拟源对自身性能的检验及指标的测试任务,解决卫星导航信号模拟源自身稳定性及可控性的难题。其次它能最大程度上规范接收机的性能和指标,形成统一的标准,推动接收机规范化、标准化发展。
目前国内对此已有相关的研究,北京邮电大学吴伟陵教授研究了卫星导航信号模拟源的工作原理及结构组成,对模拟源的结构组成及指标体系展开详细分析。该研究首先对模拟源基本量的通用仪器测量方法进行了调查,在基本量测量实现的基础上,依据各个关键指标及模拟源信号生成的特点,给出了基于通用仪器的测量方法[1];北京航空航天大学寇艳红副教授发表了《基于PXIe总线的多GNSS射频信号模拟器验证测试》,提出了一套模拟器技术指标的四级验证方法,包括模拟中频/射频信号级,基带信号级,观测量和导航电文级,定位解级。所采用的一套包括标准仪器、多GNSS软件接收机和专门分析软件在内的信号质量检测系统。其独特的信号处理和数据处理方法提高了信号的可观测性和测量精度。这种四级验证测试方法提供了信号质量的多层次精确描述,可推广应用于空间信号的质量评估[2];中南大学盛利元教授发表了围绕模拟源指标的测量校准方法与溯源技术,研究了模拟源信号精度和动态两类指标的通用仪器测量校准方法。基于传统的溯源方法及模拟源特点,提出了测量保证程序模拟源溯源方案。结合通用仪器关键指标测量方法,实现了模拟源关键指标的溯源[3]。
本文提出卫星导航信号模拟器性能指标测试方法,对关键指标项进行了分析,并基于软件接收机给出相应的测试方法,具有测试流程简单和操作方便的特点。
1 软件接收机测试平台
本文中测试所采用软件接收机为北京航空航天大学通信导航与测试实验室研发的SatRecv,运行界面如图 1所示。

图1 软件接收机运行界面
软件接收机SatRecv包括9个处理模块:初始化模块,负责对接收机进行初始化,完成扩频码、载波和各模块的初始配置;数据模块,负责从信号源或文件系统采集数据;捕获模块:完成信号的捕获,可分为粗略捕获和精确捕获两个部分;跟踪模块,完成信号的跟踪;同步模块,实现对相关结果的同步,包括位同步和帧同步;解码模块,根据不同卫星系统实现星历的解码;伪距模块,根据跟踪状态信息和卫星信息提取伪距信息;定位模块,实现卫星、接收机的定位解算;扩展模块,用于实现用户的扩展功能[4]。
软件接收机的运行流程及各部分输出参数示意图如图 2所示。

图2 软件接收机流程图
卫星导航信号模拟器关键指标通过分析图 2中各相关模块输出的参数,进行直接测试或间接计算得到测量值。
各性能指标项的测试方法为:静态定位精度,通过分析定位结果与模拟器设置的用户位置的偏差得到;动态性能指标,包括速度、加速度和加加速度的范围及精度,通过分析定位结果随时间的一次变化率、二次变化率及三次变化率得到;相位噪声,通过分析跟踪模块输出的载波相位的抖动程度,计算得到均方相位噪声值;通道间时延一致性,通过分析跟踪模块输出的两通道载波相位差得到。
2 性能指标
本文中测试所用卫星导航信号模拟器为北京航空航天大学通信导航与测试实验室的自研设备,以下各项性能指标均是基于该模拟器进行分析,模拟器实物图如图 3所示。

图3 GNSS信号模拟器
2.1 动态性能
动态性能指标项包含速度、加速度以及加加速度的范围与精度。模拟器在实现时,码相位和载波相位均由直接数字式频率合成器DDS控制,模拟器采用三阶DDS[5],以实现高精度、高动态的信号模拟,
动态性能指标由DDS级数、累加器位宽、信号码速率、载波速率以及模拟器系统时钟频率决定。
2.2 相位噪声
相位扰动包含两种:一种是由环境温度变化、元器件老化等因果关系引起的振荡器频率偏移和频率漂移;另一种是指器件内部热噪声、闪烁噪声等随机因素引起的随机相位波动,主要影响频率源的短期频率稳定度,相位噪声即是随机因素引起的频率源相位随机波动[6]。
一个实际振荡器输出信号的数学模型可表示为:
V(t)=(A0+ε(t))sin(2πf0t+φ(t))
(1)
一般振荡器的相位噪声调制功率远大于幅度噪声调制功率,因此不考虑振幅波动带来的噪声。
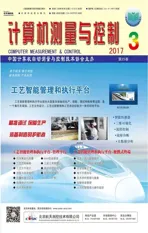
相位噪声可在时域中用输出信号频率的抖动的程度表示,也可以在频域中表示为偏离载波f处,一个相位调制边带的功率密度与载波功率的比值[7],如图 4所示。
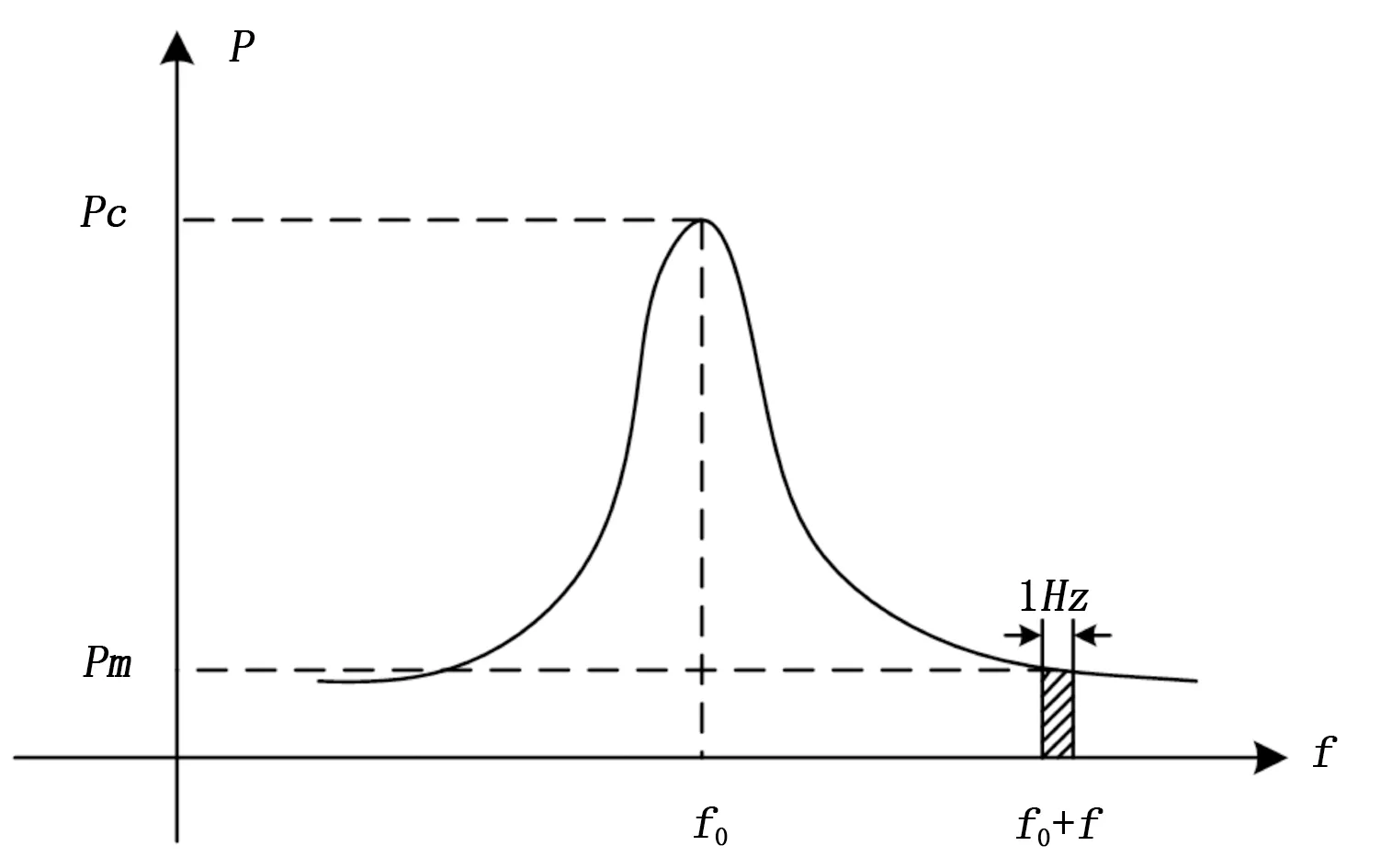
图4 相位噪声的频域表征
其中:Pm为频偏f处单位频率内的单边带噪声能量,Pc为载波功率。
2.3 通道间时延一致性
模拟器通道间时延一致性反映通道间模拟信号相位的一致性,即模拟器任两个通道在调制同一颗卫星信号时,在射频输出端引起的伪码相位不同偏差和载波相位不同偏差,均可由模拟器通道间时延一致性精度表示。
本文中采用卫星导航信号模拟器是基于FPGA实现信号的调制,布局布线时不同的调制通道经过的硬件电路不同,导致各通道路径延迟不同。其中,各通道因调制过程引入的通道固有时间延迟(由布线路径的系统时钟周期数和系统时钟频率决定)在导航定位解算时可归为接收机的钟差项;而通道调制路径延迟的差异则体现为通道间时延一致性。
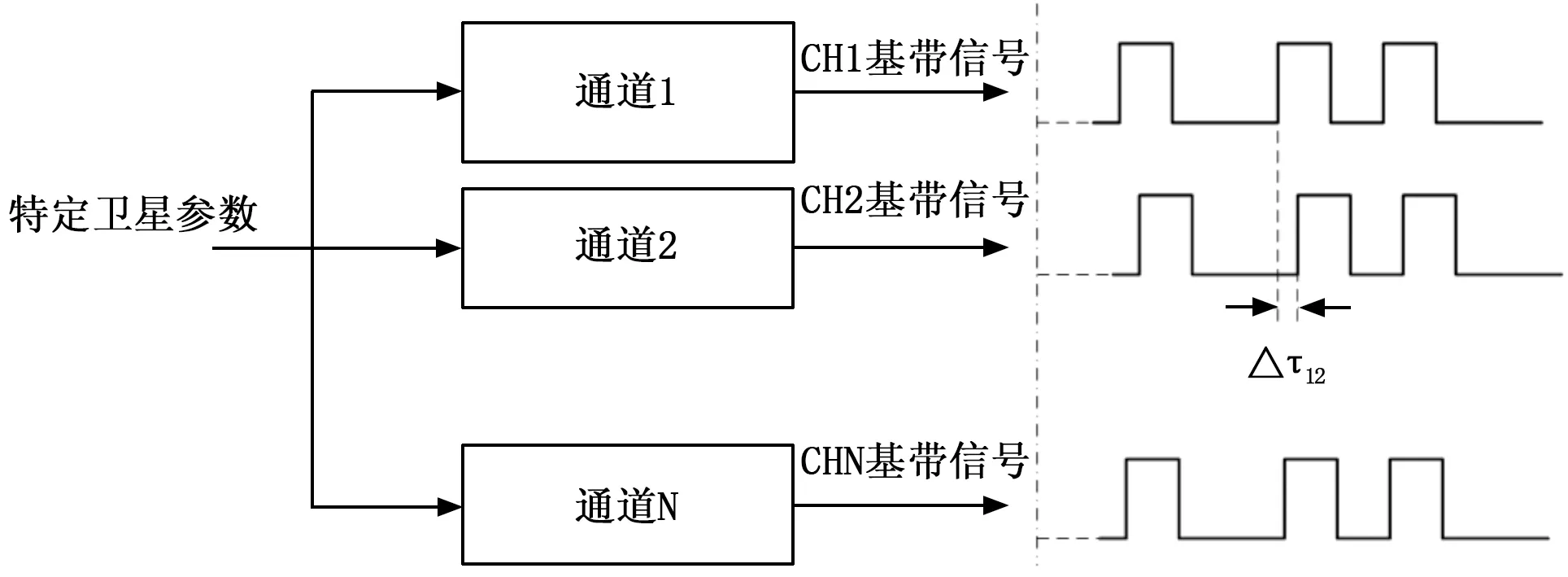
图5 通道间路径时延示意图
2.4 静态定位精度
定位精度体现导航信号模拟器的整体性能,表现为软件接收机解算的用户位置结果与模拟器设置的用户位置的偏差。静态定位精度是在保持用户位置相对于大地坐标系静止的状态下,通过测试位置偏差的均方值得到,取决于模拟器软硬件稳定性、工程实现原理以及环境因素。
3 性能指标测试方法及结果
3.1 动态性能
3.1.1 速度
设置用户初始位置的纬经高坐标为(40°,60°,1 000m),运动的北向偏角为45°。首先设置用户的速度为1 000m/s,中频频率为4.123MHz,采样率为24MHz。仿真开始时间为2013年3月20日,12:43:00,测试时间为5分钟,利用软件接收机得到测试结果如图6所示。
图6 GPS L1 C/A信号在速度为1 000 m/s时测试结果
测试结果的速度均值为999.988 8m/s,偏差为-0.011 2m/s,标准差为0.106 1m/s。

表1 GPS L1 C/A信号在速度为1 000 m/s时测试结果表
保持中频频率和数字采样率不变,设置用户载体的运动速度为12 000m/s,测试时间为5分钟,得到的结果如图 7所示。

图7 GPS L1 C/A信号在速度为12 000 m/s时测试结果
测试结果的速度均值为12 000.030 3m/s,偏差为0.030 3m/s,标准差为0.189 8m/s。

表2 GPS L1 C/A信号在速度为12 000 m/s时测试结果表
3.1.2 加速度
根据速度的测试结果,加速度的测试采用“先正向,后负向”的方式进行测试,即当速度超过10 000m/s时,加速度为负值;当速度低于100m/s时,加速度为正值。
存在为了保证财政拨给高等院校的运营经费不留余额和下年度运营经费的预算额度考虑,财务部门往往会将项目(课题)报销支出的经费串户从财政零余额账户资金或财政直接支付账户支付,截留了项目(课题)课题经费。
设置用户初始位置的纬经高坐标为(40°,60°,1 000m),运动的北向偏角为45°,用户的加速度设置为100m/s2。中频频率为4.123MHz,采样率为24MHz。仿真开始时间为2013年3月20日,12:43:00,测试时间为5分钟,利用软件接收机得到的测试结果如图8所示。
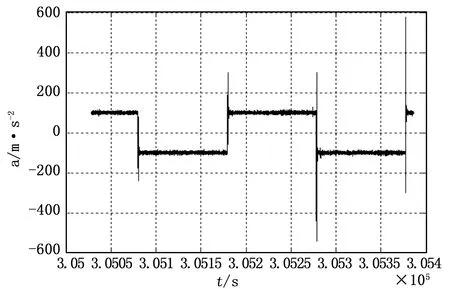
图8 GPS L1 C/A信号在加速度为100 m/s2时测试结果图
当加速度为负值时,接收机解算得到加速度均值为-99.997 8m/s2,偏差为0.002 2m/s2,标准差为4.635 5m/s2;当加速度为正值时,接收机解算得到加速度均值为100.005 5m/s2,偏差为0.005 5m/s2,标准差为4.727 5m/s2。

表3 GPS L1 C/A信号在加速度为100 m/s2时的测试结果表
保持中频频率和数字采样率不变,设置用户载体的运动速度为500m/s2,测试时间为2分钟,得到的结果如图 9所示。
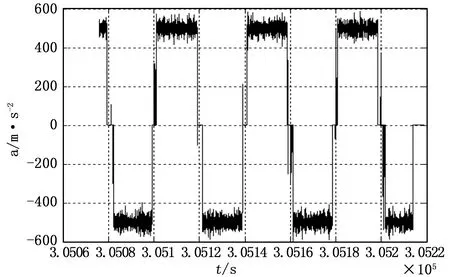
图9 GPS L1 C/A信号在加速度为500 m/s2时的测试结果图
当加速度为负值时,通过接收机解算得到的加速度均值为-499.908 7m/s2,与真实值的误差为0.091 3m/s2,标准差为27.403 8m/s2;当加速度为正值时,通过接收机解算得到的加速度均值为500.113 9m/s2,与真实值的误差为0.113 9m/s2,标准差为26.384 0m/s2。

表4 GPS L1 C/A信号在加速度为500 m/s2时的测试结果表
3.1.3 加加速度
根据之前速度测试和加速度测试的结果,加加速度的测试也采用“先正向,后负向”的方式进行。但需要同时满足速度和加速度两方面的要求,即当速度超过10 000m/s时,加速度为负值;当速度低于100m/s时,加速度为正值;当加速度超过200m/s2时,加加速度为负值;当加加速度低于10m/s2时,加加速度为正值。
设置用户初始位置的纬经高坐标为(40°,60°,1 000m),运动的北向偏角为45°,用户的加加速度设置为500m/s3。中频频率为4.123MHz,采样率为24MHz。仿真开始时间为2013年3月20日,12:43:00,测试时间为2分钟,利用软件接收机得到的测试结果如图10。
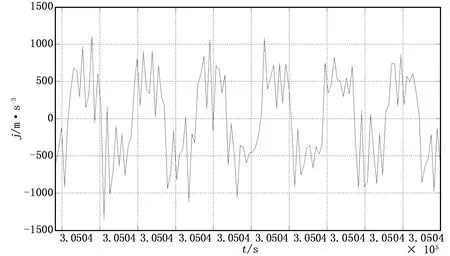
图10 GPS L1 C/A信号在加加速度为500 m/s3时的测试结果图
当加加速度为负值时,通过接收机解算得到的加速度均值为-507.810 9m/s3,与真实值的误差为-7.810 9m/s3,标准差为220.065 3m/s3;当加速度为正值时,通过接收机解算得到的加速度均值为505.899 4m/s3,与真实值的误差为5.899 4m/s3,标准差为303.315 6m/s3。

表5 GPS L1 C/A信号在加速度为500 m/s3时的测试结果表
3.2 相位噪声
设置:用户的位置是静止的,纬经高坐标为(40°,60°,1000m),不考虑多普勒效应的影响,GPSL1C/A信号的中频频率为42.966MHz,采样率为62MHz。仿真开始时间为2013年3月20日,12:43:00。
实际测试时,相位抖动归一化差值随时间的变化如图 12所示。

图11 跟踪环路输出载波相位

图12 相位差随时间的变化
分析相位抖动的均方差,求得相位噪声为:εφ=0.003rad/RMS。
3.3 通道间时延一致性
设置用户的位置静止,纬经高坐标为(40°,60°,1 000m),不考虑多普勒效应的影响,GPSL1C/A信号的中频频率为42.966MHz,采样率为62MHz。仿真开始时间为2013年3月20日,12:43:00,可见星为1、12、14、18、22、24、25、30和31。
采用软件接收机的跟踪环路对模拟信号中各颗卫星的载波相位进行跟踪,每1ms输出各通道的载波跟踪相位,相互作差并换算得到通道间的时间差。测试时,以12号星的载波跟踪相位作为参考相位,计算与其它可见星的归一化载波跟踪相位差。
以14号星为例,计算与12号星的载波跟踪相位差,测试时长5分钟,结果如图 13所示。
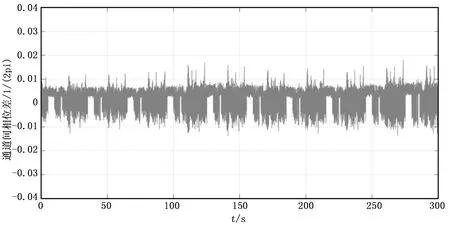
图13 12号星与14号星载波跟踪相位差(5 min)
求其均值,为0.002 655。同理对其它可见星重复以上测试流程,得到各颗可见星与12号星的载波相位跟踪误差见表6。
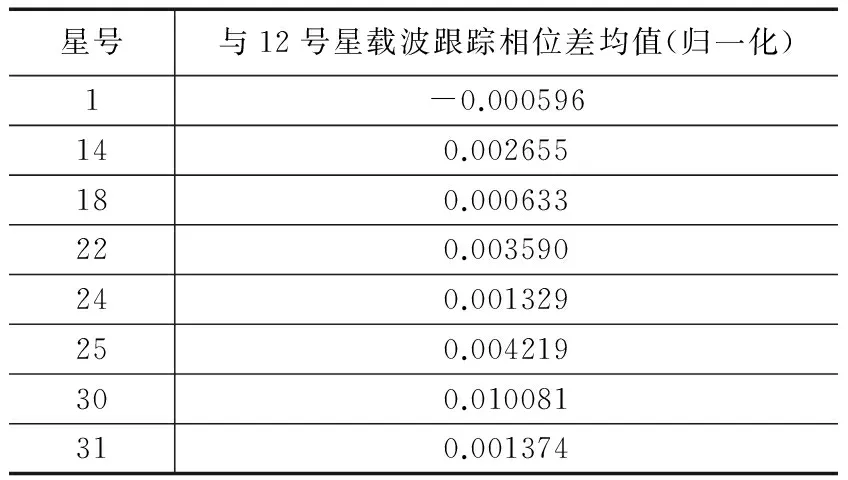
表6 各可见星与12号星的载波跟踪相位差测试结果
对以上结果计算标准差,有σφ=0.003295,则得到各通道间时延标准差为:
(2)
其中:fIF=42.966MHz,为模拟信号中频频率。
3.4 静态定位精度
设置:用户的位置是静止的,纬经高坐标为(40°,116°,1 000)。不考虑多普勒效应的影响,GPSL1C/A信号的中频频率为4.123MHz,采样率为24MHz。仿真开始时间为2013年3月20日,12:43:00。
由软件接收机定位模块输出x,y,z三个坐标分量的解算结果,如图 14所示。
对各坐标分量进行分析,对比定位结果与设置位置的偏差与标准差,结果见表 7。
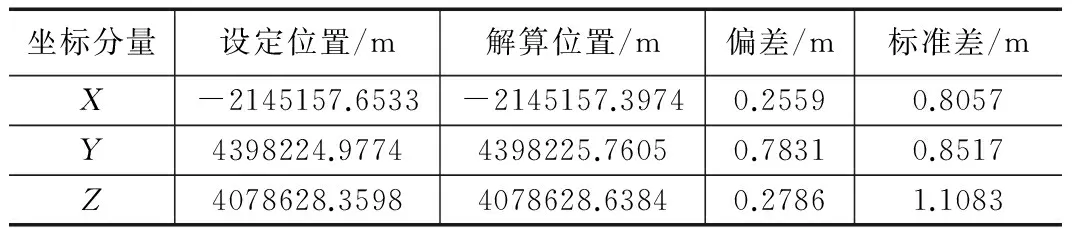
表7 GPS L1 C/A 静态定位分析结果
4 结束语
本文分析了卫星导航信号模拟器的关键性能指标的原理及特点,提出基于软件接收机的性能指标测试方法。接收机各模块对模拟信号进行结算并输出数据,然后根据各性能指标的测试要求对数据进行处理分析,得到测试评估结果。目前仅对动态性能、相位噪声、通道间时延一致性以及静态定位精度等关键指标作了测试,测试结果满足理论预期和指标范围及精度要求,后期将基于软件接收机对模拟器的其它性能指标项作测试。
[1] 冯富元. GPS 信号模拟源及测试技术研究和实现[D]. 北京: 北京邮电大学, 2009.
[2] 寇艳红, 张海涛. 基于 PXIe 总线的多 GNSS 射频信号模拟器验证测试[A]. 第二届中国卫星导航学术年会电子文集[C]. 2011.
[3] 汤震武. 卫星导航信号模拟源关键指标测量校准及溯源方法研究[D]. 长沙:中南大学, 2013.
[4] 谢 钢. GPS 原理与接收机设计[M]. 北京:电子工业出版社, 2009.
[5] 孙友礼, 陈紫强, 纪元法, 等. 基于三阶 DDS 的高动态卫星信号多普勒模拟方法[J]. 桂林电子科技大学学报, 2013, 33(6): 443-446.
[6] 董喜艳. 导航系统中相位噪声模型建立与分析[D]. 成都:电子科技大学, 2012.
[7] 李 鹏, 米 红, 郑晋军, 等. 导航信号相位噪声指标分析[A]. 第二届中国卫星导航学术年会电子文集[C]. 2011.
Test of GNSS Simulator Performance Indicators Based on Software Receiver
Ou Guobiao, Lu Hui
(School of Electronic Information and Engineering, Beihang University, Beijing 100191, China)
For performance indicators test of GNSS simulator, this paper proposes a performance test architecture based on software receiver. Through the GNSS simulator performance analysis, including dynamic performance, phase noise, inter-channel delay consistency and static positioning accuracy, this paper gives the corresponding test methods and test procedures, and test results obtained with the actual data from GNSS simulator of each index. The test results show that the software receiver can effectively test the performance of GNSS simulator, which is in line with theoretical expectations, and meet the needs of testing and evaluation of GNSS simulator.
GNSS Simulator; performance indicators; software receiver
2016-09-20;
2016-11-02。
欧国标(1991-),男,福建莆田人,硕士研究生,主要从事卫星导航信号模拟器方向的研究。
路 辉(1977-),女,黑龙江肇东人,教授,硕士研究生导师,主要从事信息系统模拟、测试、优化与评估方向的研究。
1671-4598(2017)03-0006-05
10.16526/j.cnki.11-4762/tp.2017.03.003
TP302.7
A