小波模极大值法与数学形态学边缘检测细化结果
2017-03-27江宇博
江宇博,刘 波
(中北大学 机械与动力工程学院,太原 030051)
小波模极大值法与数学形态学边缘检测细化结果
江宇博,刘 波
(中北大学 机械与动力工程学院,太原 030051)
图像边缘检测的关键是尽可能多的检测到边缘并且抑制噪声的同时,尽可能的满足单线的边缘定位精度;为此选取了一种融合小波模极大值和数学形态学的边缘检测方法来获取图像边缘;首先在对图像进行小波分解,分别利用模极大值法和多尺度多结构数学形态学方法来处理小波分解的高频分量和低频分量,利用差影法对二者的结果进行融合;然后利用大律法得到二值化图像,并用形态学边缘细化算法细化图像边缘得到最后结果;实验结果显示,融合的方法可以得到比较完善的边缘,经过二值化和边缘细化后,获得的单线宽边缘更加清晰,定位精度更高。
图象处理;边缘检测;模极大值;数学形态学;边缘细化
0 引言
边缘检测是机器视觉中基础的一步,为后续的工作打下基础。图像边缘是图像中灰度变化剧烈或者在梯度方向有发生突变的像素的集合,蕴含了图像中十分丰富的信息,被广泛用于图像融合和模式识别中[1-3]。传统的边缘检测算法如Sobel算子、Roberts 算子、Prewitt 算子和 Canny算子等等都有着相当不错的作用和效果,尤其是Canny算子由于其良好的边缘连续性和单像素的边缘定位,被广大学者深入研究改进[4-5]。但是由于以上算法本质都是梯度算法,对噪声比较敏感。
由于傅立叶变换的基是连续的三角函数,所以它对非平稳变换具有局限性。小波变换将傅立叶变换中无限长的三角函数基换成了有限长的会衰减的小波基。小波函数不仅有尺度还有平移,这样小波变换不仅可以知道信号的频率成分,而且知道它在时域上存在的具体位置。这使得小波变换具有奇异性,小波变换的这种性质也使得小波成为了检测图像边缘的好工具。小波系数模的局部极大值对应检测到的图像边缘,但是模极大值法只用到了小波分解中的高频分量,忽略了低频分量包含的边缘信息。所以很多研究人员提出了小波变换和形态学融合的方法来提取图像边缘[6-8]。基于小波变换的边缘检测,能较好地抑止噪声;基于数学形态学的边缘检测,能精确地定位边缘,较好地检测弱边缘及保留图像中原有细节信息。二者融合可以综合二者的优点,取得不错的效果。
虽然形态学和小波变换结合的方法能够得出十分完整的边缘,然而边缘像素较多,远不能达到单像素边缘。Canny曾经指出,提取出的边缘应该尽量满足与实际图像边缘一一对应。选择合适的边缘细化算法,可以得到单像素的二值化边缘,提高边缘的定位精度。为了进行更加精确的单线边缘,许多学者对边缘细化算进行了研究。
串行、并行和串-并行处理是细化处理的三种基本分类。串行算法[9-10]的细化的过程同时受到了上一次迭代图像与当前处理情况的制约。串行算法受到对图像像素的处理先后顺序的限制,因而其像素点的腐蚀或保留有时不可预测。相反,并行算法[11-12]只与上一次迭代结果有关,并行算法对图像象素进行腐蚀是利用相同的条件同时处理所有象素点,结果往往保持了各向同一性。文中使用了一种基于数学形态学变换的细化算法[13],它以几何形态学为基础对图像进行分析,很容易实现并行处理。
1 模极大值法
首先,简单介绍小波模极大值方法:
设θ(x,y)为高斯平滑函数,它具有良好的局部化特性,并且满足:
∬Ωθ(x,y)dxdy=1
(1)
θ(x,y)在x,y方向的导数分别为:
(2)
其中:φ1(x,y)和φ2(x,y)可以看作小波二维变换函数,对任意f(x,y)∈L(R2)有,二维小波变换:
W1f(x,y)=φ1(x,y)*f(x,y)
W1f(x,y)=φ2(x,y)*f(x,y)
(3)
式(3)中的两个分量正好构成了梯度矢量:
*θ)(x,y)
(4)
由此可得f(x,y)小波变换的模为:
(5)
幅角为:
(6)
对小波系数采用局部模极大值法求图像的边缘,由于梯度的方向指向梯度模极大值所在方向,所以只要沿着梯度方向检测小波变换系数模的局部极大值点,就可以得到图像的边缘点。文献[8]中提出采用双阈值法来抑制虚假边缘,同时也抑制掉了一部分真实的边缘,由于后期要对图像边缘进行二值化细化,所以这里不在进行双阈值,而是选用单阈值保住尽量多的边缘。
2 数学形态学运算
改进的形态学边缘检测主要是根据数学形态学四个基本运算构造边缘检测算子,再选用多尺度多结构元素对图像进行边缘检测。本章主要介绍数学形态学的四种基本运算、采用的数学形态学算子和采用的结构元素。
2.1 数学形态学基本运算
数学形态学是图像处理过程中解决许多难题的一个强而有力的工具。数学形态学是由集合理论发展而来的。膨胀、腐蚀、开启和闭合是形态学最基本的四种运算。其基本思想就是利用特有的结构元素利用四种基本运算的组合使用去度量和提取图像中的形状。
在一个二维的欧几里得空间Z2中,设f(x,y)为输入图像,b(x,y)为结构元素。利用结构元素b(x,y)对输入图像f(x,y)进行膨胀运算:
f⊕b(x,y)=max{f(x-s,y-t)+b(s,t)
|(x-s),(y-t)εDf,(s,t)εDb}
(7)
利用结构元素b(x,y)对输入图像f(x,y)进行腐蚀运算:
f⊙b(x,y)=min{f(x+s,y+t)-b(s,t)
|(x+s),(y+t)εDf,(s,t)εDb}
(8)
利用结构元素对输入图像进行开运算和闭运算分别表示为:
f·b(x,y)=(f⊙b)⊕b
(9)
f·b(x,y)=(f⊕b)⊙b
(10)
2.2 改进形态学边缘提取算法
四种基本运算对图像具有不同的效果,膨胀运算是利用结构元素对图像进行扩大和填充;腐蚀运算可以用来缩小图像中的成分,可以消除比结构元素小的成分,它们具有对偶性。开运算是先进行腐蚀后进行膨胀,作用是去除比较细小的部分,撕开了较小的间隙;闭运算的顺序跟开运算相反,先进性膨胀后进行腐蚀,作用也相反,填充物体内细小孔洞、连接临近物体、平滑其边界,它们也具有对偶性。正是因为这些作用,形态学可以用来提取图像的边缘,也可以用来对图像进行降噪。
边缘检测算子是通过四种基本运算的组合推到得出的,结合形态学的定义及扩张性,设f(x,y)为输入图像b(x,y)为结构元素,g(x,y)为边缘图像,可以得知式(5)成立:
f⊕b(x,y)≥f·b(x,y)≥f≥
f°b(x,y)≥f⊙b(x,y)
(11)
进而可以由(5)式推导出传统形态学边缘提取算法如下式(6)所示:
g(x,y)=f⊕b-f
g(x,y)=f-f⊙b
g(x,y)=f⊕b-f⊙b
g(x,y)=f·b-f
g(x,y)=f-f°b
g(x,y)=f·b-f°b
(12)
由于上面的算法都对噪声比较敏感,没有考虑到去噪。我们将使用一种新的边缘检测算法[14],该算法不仅可以检测图像边缘,而且可以在一定程度上去噪。
gi(x,y)=((f·b1)°b2)⊕b3i-
((f°b1)·b2)⊙b3i(i=1,2,3…n)
(13)
关于结构元素的选择,b1、b2为滤波结构元素,之所以被称为滤波结构元素是因为其几何结构明显大于分解的结构元素,于是在图像平滑的作用上大于分解的结构元素,对噪声信号过滤作用明显。当然代价就是要牺牲掉一些小的局部细节[15]。b3i(i=1,2,3…n)为分解元素,文献[15]中实验证明四种结构元素对图像进行边缘提取后的边缘进行线性结合可以提取出更为准确、细节更多的边缘。
(14)
2.3 数学形态学边缘细化算法
简单来说,边缘细化就是在保持图像原有的形状的基础上去除一些点。细化的目的是得到图像中心的宽度为一个像素的黑线,在未达到单像素之前必须沿着图像边缘不停的去除一些点。细化的结果被称为原图案的骨架。骨架与原图案要具有相同的拓扑形状和连通性。
击中击不中变换是进行数学形态学边缘细化的理论基础。击中击不中变换的基本思想是抽取图像中与给定领域结构相匹配的所有像素。
设f(x,y)为输入图像,b(x,y)为结构元素,且b(x,y)由两个不相交的的部分b1(x,y)和b2(x,y)组成,满足两者的交集是空集,两者的并集正好组成结构元素b(x,y),所以f(x,y)被b(x,y)击中定义为:
f*b(x,y)=(f⊙b1)∩(fc⊙b2)
(15)
进一步可以知道边缘细化的定义为:
f⊗b(x,y)=f-f*b(x,y)
(16)
设一个结构元素系列:
{b(x,y)}={b1(x,y),b2(x,y)…bn(x,y)}
(17)
那么图像f(x,y)被结构元素系列细化表示为:
f⊗{b}(x,y)=(…((f⊗b1)⊗b2)…)⊗bn
(18)
从上式中可以看出,细化的过程是,先用一个结构元素b1(x,y)对图像f(x,y)进行细化,接着用b2(x,y)对b1(x,y)细化过的结果继续进行细化,以此类推,直至用bn(x,y)对图像细化完一遍为止。由于细化是有方向的,所以我们选取结构元素系列包含8个不同方向的结构元素:
(19)
上述8个结构元素b41,b42,b43,b44,b45,b46,b47,b48分别用来去掉南、西、北、东、西南、西北、东北、东南8个方向上的点。其中结构元素中数字‘1’代表目标图像上的点,数字‘0’代表背景图像中的点,‘o’代表中参考中心点,‘x’表示既可以是目标图像上的点也可以是背景图像中的点。
3 边缘检测及其细化具体流程
步骤1:利用高斯函数一阶偏导数作为基本小波,对初始图像进行分解得到高频子图像和低频子图像。
步骤2:采用模极大值法对高频子图像进行边缘检测得到高频子图的边缘。
步骤3:用多尺度多结构元素数学形态学算法对低频子图像进行边缘检测,得到低频边缘。将式(14)中的结构元素带入式(13)中,4个方向的边缘求和得到形态学处理边缘结果:
Il=g1+g2+g3+g4
(20)
步骤4:将低频和高频图像采用差影法进行融合,生成最终的边缘图像。
假设步骤2中得到的高频子图的边缘为Ih(x,y),步骤3中得到的低频子图的边缘为Il(x,y),融合后的图像为I(x,y) 。
I(x,y)=αIl(x,y)+βIh(x,y)
(21)
其中:α、β分别为加权因子。
步骤5:采用大律法对图像进行二值化处理。
设T为目标和背景的分割阈值,图像平均灰度为:
u=w1u1+w2u2
(22)
目标与背景之间的灰度方差为:
e=w1(u1-u)2+w2(u2-u)2
(23)
其中:u1和w1分别表示目标的平均灰度值和目标点数占图像比例,u2和w2分别表示背景的平均灰度值和背景点数占图像比例。只需要使得方差最大化,T便是最佳阈值。
步骤6:对二值化的图像进行边缘细化,遵循公式(18)利用结构元素b41,b42,b43,b44,b45,b46,b47,b48循环对图像进行边缘细化,直至结果不在发生变化。在细化过程中不能删除图像中的孤立点、直线断线、内部点。
4 实验结果及分析
为了验证算法的可行性,实验使用CPU为corei7,内存为8GB的笔记本,在Matlab2015a的环境下编程实现了上述算法。首先实验以标准的Lena图和Peppers图为例,分别与单阈值小波模极大值、多尺度多结构元素形态学法、融合算法、Canny算法进行比较,试验中α、β均取值为0.5。

表1 边缘像素数和算法用时
在图1和图2中可以看出,文中采用的多结构形态学提取的图像边缘虽然边缘结构比较清晰,但是存在较多的细碎点和孤立点,这些点并不是图像边缘;模极大值法提取的边缘在定位精度上比较好,但是损失了连续性,Lena图左侧的两个比较长得竖线边缘接近丢失;两种算法的融合算法取得了比较清晰的图像边缘,边缘清晰,但是边缘太粗,定位精度大打折扣;Canny算法取得了单像素的边缘而且连续性很好,但是由于Canny算法后续采用双阈值进行边缘链接,在Lena图的脸上和帽子处出现了许多比较短的伪边缘;文中算法的最终结果由于经过大律法二值化处理,并且经过形态学边缘细化,在比较长得边缘上获得了较好的连续性,也去除了短小的伪边缘,边缘取得了单线的精度。
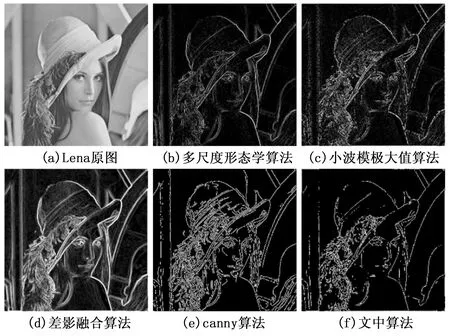
图1 Lena图边缘检测结果

图2 pepper图边缘检测结果
对于文中算法的抗噪性,实验采用CCD相机拍摄图像进行实验,采样图片光照不均匀,带有混合噪声,如图3中原图所示。可以看出文中算法保留了差影融合后图像边缘抗噪的优点,最后取得了单像素的边缘,效果良好。
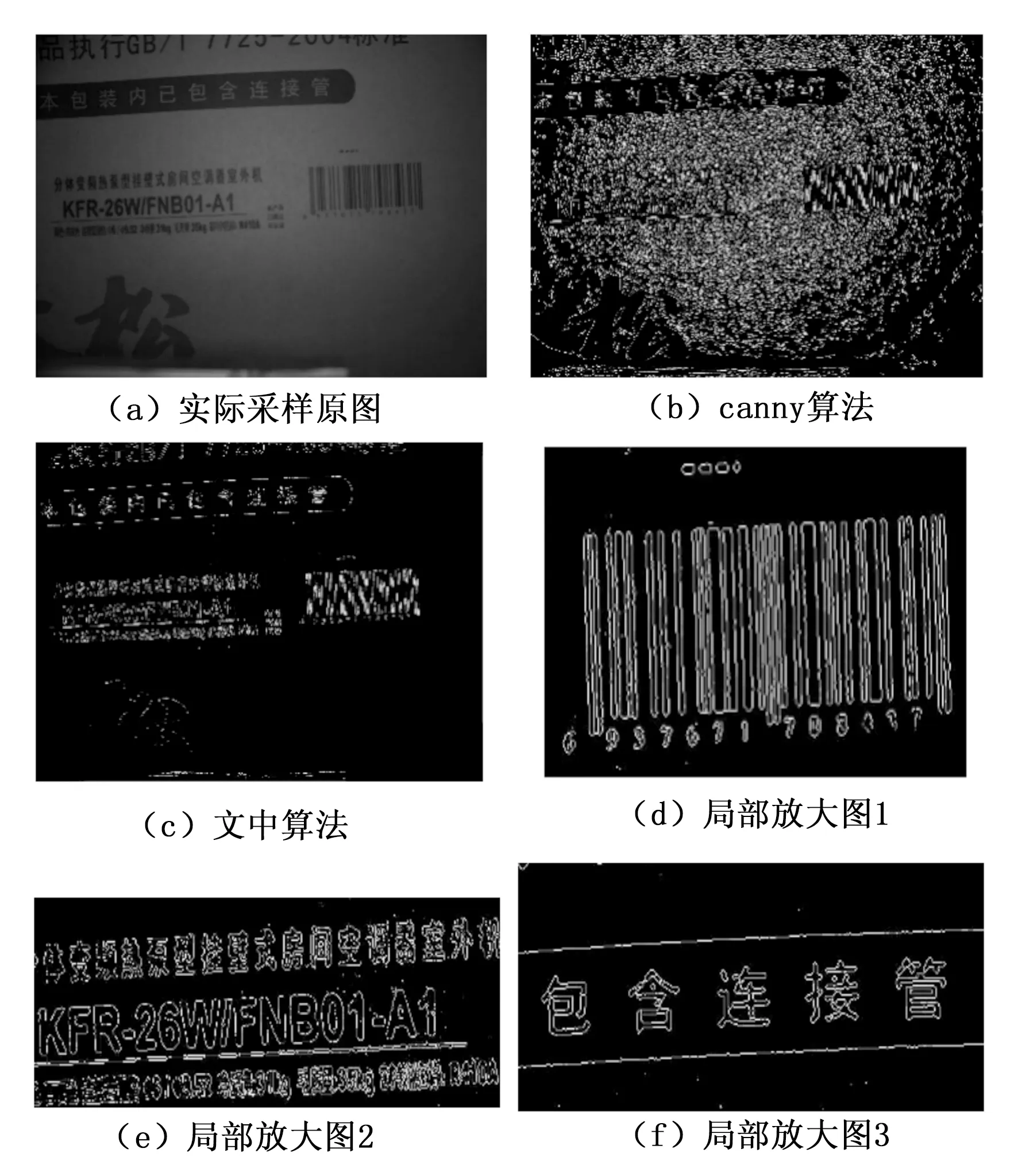
图3 CCD采样图边缘检测结果
5 结束语
综上所述,差影法融合技术融合了小波模极大值法和多尺度多结构数学形态学算法的优点,取得了定位精度高,边缘连续的灰度图像。在对图像利用大律法进行二值化处理后,利用形态学进行边缘细化,细化边缘定位精度较好,而且对噪声抑制能力比较好。但是文中比较密集的纹理处,图像边缘会出现不连续,这将是下一步研究方向。
[1]DuanZ,WenD,SongZ.Animprovedimagefusionalgorithmbasedonwavelettransform[A].InternationalSymposiumonPhotoelectronicDetection&Imaging[C]. 2013:165-189.
[2] 齐勇刚. 基于草图和边缘的物体识别[D]. 北京邮电大学, 2015.
[3]ZhangX,LiX,FengY.AnewimagefusionperformancemeasureusingRiesztransforms[J].Optik-InternationalJournalforLightandElectronOptics, 2014, 125(3):1427-1433.
[4]BiswasR,SilJ.AnImprovedCannyEdgeDetectionAlgorithmBasedonType-2FuzzySets[J].ProcediaTechnology, 2012, 4(11):820-824.
[5] 王 植, 贺赛先. 一种基于Canny理论的自适应边缘检测方法[J]. 中国图象图形学报: 2004, 9(8):957-962.
[6] 姚宇峰, 夏开建, 钟 珊,等. 改进的形态学和小波变换边缘检测算法研究[J]. 计算机工程与应用, 2011, 47(21):214-216.
[7] 乔闹生, 邹北骥, 邓 磊,等. 一种基于图像融合的含噪图像边缘检测方法[J]. 光电子:激光, 2012(11):2215-2220.
[8] 崔丽群, 张 月, 田 鑫. 融合双阈值和改进形态学的边缘检测, [J]. 计算机工程与应用, 2016.
[9]MoonBS,LeeDY,LeeHC.Fuzzysystemrepresentationofdigitizedpatternsandanedgetrackingthinningalgorithm[A].IfsaWorldCongressand,NafipsInternationalConference, 2001.Joint[C].IEEE, 2001:2155-2161.
[10]ArcelliC,BajaGSD.One-passtwo-operationprocesstodetecttheskeletalpixelsonthe4-distancetransform[J].IEEETransactionsonPatternAnalysis&MachineIntelligence, 1989, 11(4):411-414.
[11]GuoZ,HallRW.Fastfullyparallelthinningalgorithms[J].CvgipImageUnderstanding, 1991, 55(3):317-328.
[12]LamL,SuenCY.AnEvaluationofParallelThinningAlgorithmsforCharacterRecognition[J].IEEETransactionsonPatternAnalysis&MachineIntelligence, 1995, 17(9):914-919.
[13] 李 杰, 彭月英, 元昌安,等. 基于数学形态学细化算法的图像边缘细化[J]. 计算机应用, 2012, 32(02):514-516.
[14]LiuQ,LaiCY.Edgedetectionbasedonmathematicalmorphologytheory[A].ImageAnalysisandSignalProcessing(IASP), 2011InternationalConferenceon[C].IEEE, 2011:151-154.
[15] 成耀君. 基于数学形态学的多尺度边缘检测研究[D]. 武汉:华中科技大学, 2011.
Wavelet Modulus Maxima Method and Mathematical Morphology Edge Thinning Results
Jiang Yubo, Liu Bo
(School of Mechanical and Power Engineering,North University of China,Taiyuan 030051,China)
The key to image edge detection is to detect edges as much as possible and suppress noise effectively. Finally we want to meet the single-line edge positioning accuracy. For the purpose, a new edge detection method based on wavelet transform modulus maxima and mathematical morphology is selected to get the edge of image. First, the original image is decomposed by wavelet decomposition. After that, wavelet modulus maxima method and multi-scale and multi structure mathematical morphological method were used to deal with high-frequency components and low frequency components separately. Then, the two edges processed before were fused by sub-subtraction method and morphological edge thinning algorithm is used to get the thinning edge of the image. The experiments show that the fusion method can get more perfect edge, the single-line edge is more clear, and the positioning accuracy is improved.
image processing;edge detection; modulus maxima; mathematical morphology; edge thinning
2016-10-25;
2016-11-24。
江宇博(1993-),男,研究生,主要从事图像处理方向的研究。
刘 波(1974-),男, 博士, 副教授,主要从事机电液一体化设备的智能控制和状态监测方向的研究。
1671-4598(2017)03-0165-04DOI:10.16526/j.cnki.11-4762/tp
TP
A