基于大顶子山库区无人机库区巡航应用方案研究
2017-03-27程为平安小刚王俊文
程为平++安小刚++王俊文
摘要: 随着无人飞机遥感、遥控技术的成熟,无人机巡检、应急监测应用领域的发展。本文主要是针对大顶子山航电枢纽水工建筑物、附属建筑物、山体航道、及其附属设施状况的具体巡检工作需求,对目前成熟、常用的无人机进行技术选型,综合多旋翼无人机操作简单、机动灵活,使用和维护成本低等特点,并结合航运枢纽库区巡检应用场景与需求最终形成航运枢纽库区无人机巡检应用方案。
关键词:无人机,库区巡航,巡检方案
中图分类号:S127 文献标识码:A 文章编号:1672-3791(2017)01(a)-0000-00
引言
交通运输部为了加快内河水运发展,积极探索在山区河流航运枢纽同步建设水电站,规划了江河流域的航道建设航运枢纽。松花江大顶子山航电枢纽工程是松花江航道梯级开发总体规划中的七座枢纽之一。航电枢纽主管部门定期的巡检工作主要是查辖区内非法捕捞、山体树木非法砍盗、库区岸边山体滑坡情况、库区水工建筑设施健康状况安全隐患。
1. 需求分析
非法捕捞问题主要因为电厂入水口和泄洪闸下游,水流条件复杂,非法捕捞渔船存在风险较大,然而又屡禁不止,和主管部门打起“麻雀战”;非法砍盗树木对山体健康存在安全隐患,暴雨多发期易形成道路湿滑山体滑坡;针对水工建筑物巡检,主要采用徒步方式,暴雨多发期是巡检的重点,然而雨后巡检道路湿滑,现场路况条件复杂,对于较高的水工建筑物甚至存在巡检死角,巡检人员工作难度大。航运枢纽库区面积较大,巡查周边山体滑坡情况需驾船出行,人员费用和船舶使用养护费均是大的开销。总结出的巡检工作的主要问题体现在巡检范围大,人力物力要求高,恶劣天气道路湿滑巡检环境恶劣,突发性山体滑坡等危险环境,人员安全隐患等。
随着无人飞机遥感、遥控技术的成熟,无人机巡检、应急监测应用领域很广,包括国内主要交通干线、海事、大河、大湖等进行全面侦察等。针对航运枢纽的巡检工作的复杂模式,科学的无人机巡航应用模式可以有效的规避大量人员巡检工作量,突发性山体滑坡等危险环境作业可以很好的规避人员安全风险;另外,无人机巡检航拍可以有效取证非法捕捞和非法砍盗现象,对非法捕捞船只及非法盗伐人员有很好的警示作用。
2. 无人机库区巡航方案研究
2.1无人机机型选择
将无人机应用与库区巡检,选择性能优越、适应库区现场实际需要的无人机至关重要。按照无人机飞行特点和机翼种类,无人机一般分为固定翼无人机、无人直升机和多旋翼无人机三种。
固定翼无人机飞行速度快,拍摄广距离远,载荷大,采集到的影像信息只能提点基本概况,起飞降落都需要比较空旷的场地,适合林业和草场监测、比较适合林业和草场监测、矿山资源监测等领域的应用。因此,该机型适用于进行大范围监测。
无人直升机相比能够垂直起降,适应性强,不需复杂的起飞与降落辅助设备,可在狭窄的场地和舰船上垂直起降。但是无人直升机的调试、操作和控制需要相对专业的人员负责,熟悉飞行控制原理,甚至要求有直升机飞行操控经验,以便降低无人直升机的非技术手段消耗和确保后期的保养维护。
多旋翼无人机特点在于成本低,小巧轻便,操作简单,可代人员登打,目前均为电动,在人工遥控控制下可以现实精确稳定的悬停,而且操作简单、机动灵活,使用和维护成本低,不需要复杂的地面保障设备。因此该机型一般用于替代人力巡航,适合于承担精细的作业任务,完成对杆塔零部件的状态巡航。综上,无人机库区巡航方案的机型选择多旋翼無人机。
2.2 库区巡航应用方案研究
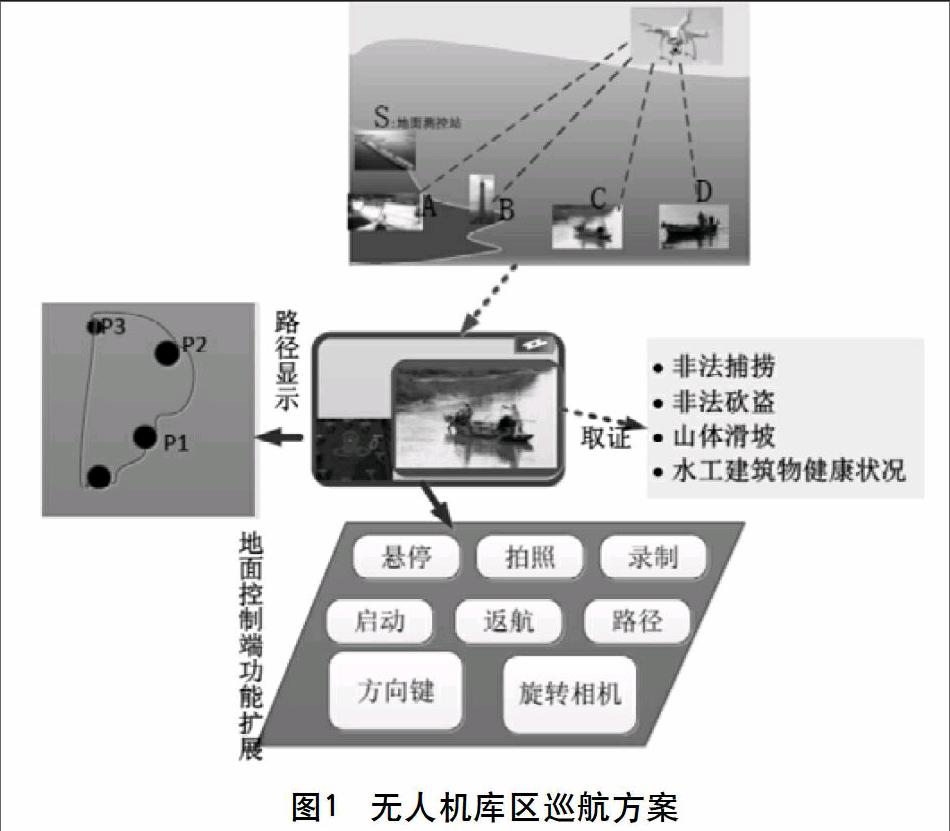
库区环境主要由水工建筑物、附属建筑物、山体航道、及其附属设施组成的,有巡检对象多,范围大的特点,结合多旋翼无人机性能特点。无人机巡检系统主要设计包括地面站测控、数据传输、采集数据处理、缺陷诊断四大大主要模块,另外二次开发附加无人飞行避障功能。
无人机在巡线前,操作人员在地面显示器上标注巡检的任务点,按照地面控制端的路径规划,依据续航能力和实时路径规划技术对所选任务点进行最优巡检路径分析,并在模拟库区地图场景基础上展示地图路径;巡线中控制端实时观看无人机实时图像并通过图传地面站监测,拓展精准悬停拍照功能,巡航视频录制后处理,可进一步背景建模达到目标检测的效果。
3. 方案关键技术
3.1路径规划
路径实时规划技术是指无人机在飞行或悬停过程中能够实时的判断当前所处位置与所有巡检点和起飞点的最优飞行路径。该项技术可以实时的向无人机操作人员传达路径信息,规避无人机无法返航或因担心电量返航过早返航。
3.2 图像数据处理
由于无人机的图传系统从检测端到地面测控端的最大传输距离是理想范围5千米,因此以地面测控端为中心,无人机在半径为5千米范围内飞行可以保障拍摄到的图像实时传输到测控端。库区非法捕捞船只大部分是渔家小船,没有规格,外表颜色不鲜明,无法对这类船只进行检测。库区巡检其中一个主要目的只是为了取证,找到非法捕捞的船只,但从万帧级别的的图像画面中无法找到非法目标,消耗精力,工作效率低,而无人机测控系统扩展船舶检测技术采用视频图像处理技术对画面中的异常状况进行搜寻。因此,本项目从图像处理的角度出发克服这一难题。
4. 结论
该方案已经初步在大顶子山库区实验初步取得良好的应用效果,随着无人机巡航技术的发展,构想进一步研究完善无人机库区巡航模式,发展有有争对性的实现对库区巡检工作中从作业任务到飞行巡航计划到分析结果的可视化全过程。
参考文献:
[1].王新增,慈林林,李俊山等.具有时间约束任务的无人机航迹规划方法[J].火力与指挥控制,2011,36(12):8-11.
[2].李迪,陈向坚,续志军.增益自适应滑模控制器在微型飞行器飞行姿态控制中的应用[J].光学精密工程,2013,21(5):1183-1191.
[3].ZhonghuaHu,MinZhao,Min Yao et al.2011.Cooperative Attack Path Planning for Unmanned Air Vehicles Swarm Based on Grid Model and Bi-level Programming[J].Journal of information and computational science,8(4):671-679.
