动感座椅用平动台的受力分析与优化
2017-03-25王红州邹晓晖陈润六
王红州,邹晓晖,陈润六
(江西省机械科学研究所,江西南昌330002)
动感座椅用平动台的受力分析与优化
王红州,邹晓晖,陈润六
(江西省机械科学研究所,江西南昌330002)
介绍了一种应用在动感座椅设备上构型为3-PR(4R)R的三平动并联机构,在Solidworks软件中建立其三维模型,进行了力学仿真分析,并在此基础上进行了结构优化,使得3-PR(4R)R三平动并联机构在实际使用过程中的力学性能更加优越。
动感座椅;并联机构;仿真;力学分析
动感座椅是一种新型影院所使用的设备,具有左右摇摆、前后俯仰、上下运动三个自由度,可使观众更好地体验影片[1]。市场上的三自由度动感座椅多采用3-RPS并联机构作为执行机构[2],此类设备的驱动大都使用电动缸,因此设备的成本较高,影响了动感影院的普及推广。江西省机械科学研究所研发了一种三平动运动输入多重3-RPS机构运动输出的动感座椅设备,并获得了国家发明专利授权[3]。该设备由于将所有3-RPS并联机构座椅的驱动转换成了一个三平动并联机构,因此可大幅度降低动感座椅设备的成本,有助于动感座椅的市场推广。
江西省机械科学研究所研发的新型动感座椅设备的驱动为三平动并联机构,其构型为3-PR(4R)R[4]。本文针对此构型的三平动并联机构进行了受力分析,并提出了一种新型的构型布局,使得三平动并联机构受力情况更加合理。
1 新型动感座椅设备简介
新型动感座椅设备由3-PR(4R)R并联机构和3套3-RPS并联机构组成,所有机构共用一个机架。3-RPS不安装驱动,其动平台上一点通过球铰联接到三平动3-PR(4R)R并联机构的平动台上(球铰中心不在3-RPS并联机构动平台的转动中心)。3-PR(4R)R并联机构的3个P副为主动运动副,平动台的三维运动通过球铰转变为3-RPS并联机构的两转一移的运动。3套3-RPS并联机构的结构尺寸参数及初始位姿完全相同,在同一平动台的带动下可实现两转一移运动的同步输出。图1所示为新型动感座椅设备的样机。

图1 新型动感座椅设备样机
2 平动台的受力分析
平动台作为3-PR(4R)R并联机构与3-RPS并联机构的联接模块,其结构性能对新型动感座椅有着很大的影响。如图2所示,在Solidworks软件中建立3-PR(4R)R并联机构的三维模型图。根据平动台的受力情况,首先分析平动台在3球铰中心处受竖直向下方向的力作用下的应变情况。
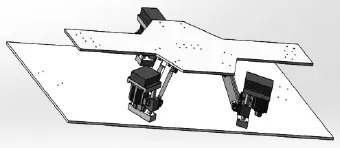
图2 3-PR(4R)R并联机构三维模型
将平动台的材料设置为普通碳钢,其密度为7.8 g/cm3,屈服强度为220 MPa.设置边界条件为将平动台与滑块支链处铰链连接处设置为固定连接(假定铰链及支链刚度足够),分别在3个座椅与平动台连接铰链处各施加2 500 N的力,力的方向为垂直于平动台大平面方向。平动台的网格划分采用标准网格器进行实体网格划分,设置单元大小为13.991 8 mm,雅可比点为4,公差为0.699 6 mm,单元总数为48 348,节点数为87 956,网格品质为高品质。其分析结果显示平动台受力后位移变化较大,如图3所示。
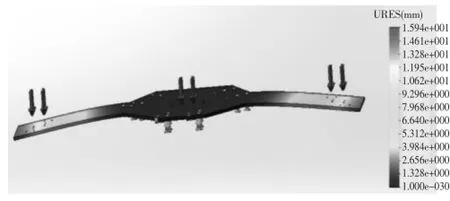
图3 平动台受力后的位移云图
3 三平动机构结构改进
从图2可以看出,平动台由3条PR(4R)R支链支撑,但其实际受力点并非支链的支撑点,因此,平动台的受力情况不是很好。针对这一情况,将3条PR(4R)R支链的支撑点移至球铰中心下方,可保证球铰中心竖直方向的力较好被支链吸收。其三维模型如图4所示。

图4 改进后的3-PR(4R)R并联机构
同样的,将平动台的材料设置为普通碳钢,其密度为7.8 g/cm3,屈服强度为220 MPa.设置边界条件为将平动台与滑块支链处铰链连接处设置为固定连接(假定铰链及支链刚度足够),分别在3个座椅与平动台连接铰链处各施加2 500 N的力,力的方向为垂直于平动台大平面方向。平动台的网格划分采用标准网格器进行实体网格划分,设置单元大小为13.991 8 mm,雅可比点为4,公差为0.699 6 mm,单元总数为48 348,节点数为87 956,网格品质为高品质。其分析结果显示平动台受力后位移变化情况得到明显改善,改进前最大变形量为1.59 mm变为改进后最大变形量为的0.009 mm,如图5所示。

图5 改进后平动台受力的位移云图
4 结束语
通过进行3-PR(4R)R并联机构平动台的受力分析,对比最初结构与改进后结构平动台受力后的位移变化情况,可知采用改进后的3-PR(4R)R并联机构的结构更为合理。
[1]霍电辉.新型三自由度动感模拟平台的研发[D].太原:太原科技大学机械电子工程,2013.
[2]王旭明.动感影院系统研究与设计[D].武汉:华中科技大学,2013.
[3]王红州.三平动输入多重3-RPS机构输出的4D特效座椅[P].中国:ZL201410319373.5.2016-01-20.
[4]邹晓晖,陈润六,王红州,等.一种新型4D动感座椅设备的设计与分析[J].制造业自动化,2016,38(8):102-106.
Mechanical Analysis and Optimization of Three Translational Motion Platform Used for Dynamic Seat
WANG Hong-zhou,ZOU Xiao-hui,CHEN Run-liu
(Jiangxi Mechanical Scientific Institute,Nanchang Jiangxi 330002,China)
This paper introduced 3-PR(4R)R Parallel mechanism which used for moving platform device.A three dimensional model was established in Solidworks software,and the mechanical simulation analysis and structural optimization were carried out,and a more superior performance structure was obtained.
moving platform;parallel mechanism;simulation;mechanical analysis
TH112
:A
:1672-545X(2017)01-0038-02
2016-10-11
江西省科技支撑重点项目(20151BBE50125)
王红州(1986-),男,河北邯郸人,硕士,助理工程师,研究方向:机器人与并联机构。