周边对接系统的运动规律研究
2017-03-24张宗峰张全成
张宗峰+张全成


摘 要:文章详细的介绍了周边对接系统在空间交会对接过程中的运动规律。主要包括:,捕获原理,空间矢量方程,接触力,捕获后的速度与分离速度以及轨道转移。通过上述对其运动规律的研究,揭示了该对接系统的本质,为以后的设计和仿真计算具有一定的参考价值。
关键词:周边对接系统;运动规律;交会对接;仿真
空间飞行器交会对接需要实现高精度高可靠性地相对定位和定速,以便控制系统实时地获得两飞行器间相对位置和速度信息。在交会对接期间,飞行器的绝对速度和位置关系,需使用导航和测试系统来获取。国内外学者做了许多的研究,他们的研究结果表明只有掌握了其运动规律才可以准确的来控制并实现理想的效果。
文章总结国内外学者和同行们的研究经验,以周边对接系统为例来研究其运动规律,主要从周边对接系统的捕获原理,空间矢量方程,接触力,捕获后的速度与分离速度以及轨道转移等方面研究,从而进一步揭示其空间交会的运动规律。
1 捕获原理
周边对接系统有以下几种:(1)“阿波罗”—“联盟”号对接系统;(2)APAS雌雄同体周边装配系统;(3)Hermes-Columbus对接系统。
1.1 “阿波罗”—“联盟”号对接系统
该系统的关键部分导向环,在其导向环上装有导向瓣,导向环本身装在3个能够提供6自由度运动的螺杆上,为了确保有一定的缓冲作用,螺杆与阻尼器和传动系统联接在一起,用6个阻尼器来将导向环和对接框分開。阻尼器在主动边上是伸出的;在被动边,阻尼器则是缩进的。在每个导向瓣上装有一个弹簧捕获锁,弹簧捕获锁的相当于在导向环上装有作捕获锁接受器。两个飞行器接触后,主动导向环与被动导向环对准,捕获锁和对应的捕获锁接受器联接上。此时,在电机的总用下,导向环缩进,完成捕获。
1.2 APAS雌雄同体周边装配系统
APAS和“阿波罗”—“联盟”号周边对接机构的基本功能相同。该系统和“阿波罗”—“联盟”号的区别是:导向瓣指向对接通道内部。用阻尼器将导向环和对接框分开,把捕获锁装在每个导向瓣的中间,它和另一边导向环边缘的捕获锁接受器联接。完全联接后,应用螺杆缩进导向环,完成捕获。
2 空间矢量方程的分析
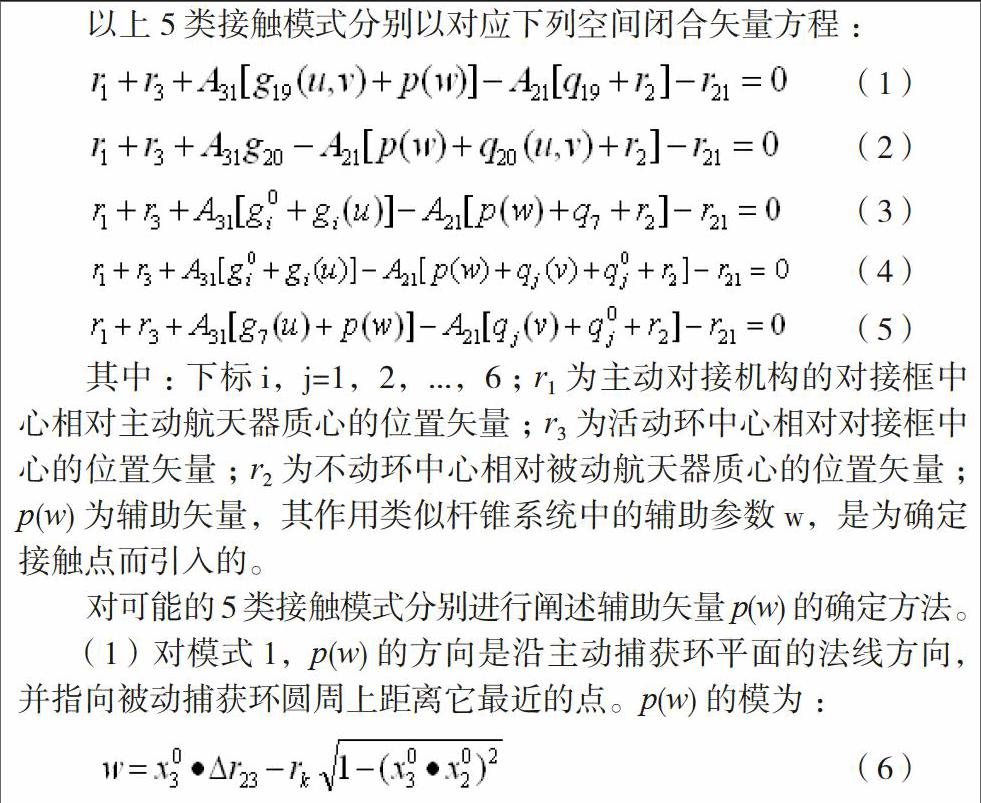
在周边系统捕获的过程中,可能的接触模式共有5类20种。
(1)活动环的环面与不动环边缘接触(模式1)。
(2)活动环边缘与不动环的环面接触(模式2)。
(3)活动环导向瓣边缘与不动环边缘接触(模式3~模式8)。
(4)活动环导向瓣边缘与不动环导向瓣边缘接触(模式9~模式14)。
(5)活动环边缘与不动环导向瓣边缘接触(模式15~模式20)。
以上5类接触模式分别以对应下列空间闭合矢量方程:
5 结语
经过对周边对接系统整个过程的分析,首先先阐明其捕获原理,在此基础之上,进一步研究周边对接系统的空间矢量、接触力以及捕获和分离时速度。通过对上述问题的研究,深入浅出的揭示了其空间对接的本质,可以掌握航天器在空间对接过程中的运动规律,为我国以后设计空间对接机构和仿真具有一定的参考价值。
参考文献
[1] 阳仁贵,袁运斌,欧吉坤.相位实时差分技术应用于飞行器交会对接研究[J].中国科学:物理学 力学 天文学,2010(40):651-657.
[2] 朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007: 207-242
[3] 娄汉文,曲广吉,刘济生.空间对接机构[M].北京:航空工业出版社,1992:30-70.
[4] 陈宝东,唐平.空间对接机构技术及其研制[J].上海航天,2005,22 (05):6-8.
[5] 张华,肖余之,陈萌,杜三虎.空间对接机构对接锁系同步性仿真研究[J].2009,30(01):310-314
[6] 于登云,杨建中.航天器机构技术[M].北京:中国科学技术出版社, 2011:198-213.
[7] 陈小前,袁建平,姚雯,赵勇.航天器在轨服务技术[M].北京:中国宇航出版社,2009:361-420.
作者简介:张宗峰(1985- ),男,河南焦作人,本科,工程师,研究方向:冷弯成型生产线的技术研究和设计。
