桥式起重机三维吊装路径规划
2017-03-23李小瑾陈志梅邵雪卷
李小瑾,陈志梅,邵雪卷
(太原科技大学电子信息工程学院,山西 太原 030024)
桥式起重机三维吊装路径规划
李小瑾,陈志梅,邵雪卷
(太原科技大学电子信息工程学院,山西 太原 030024)
桥式起重机吊装路径规划研究大部分是在二维环境下进行的,在三维环境中的路径规划研究较少,且目前关于桥式起重机的三维路径规划方法多是基于传感器导航的Srinivas算法。该算法的参数是根据经验得到的,且在不同环境中很难准确选择最优值。所建立的环境模型障碍物约为两个,无法证明在更多障碍物的环境中是否仍然可以保证路径最优且安全防撞。鉴于智能算法的优势以及在机器人领域中的成功应用,提出了基于改进蚁群算法的三维吊装路径规划方案。建立静态且环境已知的桥式起重机三维作业环境模型,利用栅格法划分空间,将桥式起重机所吊重物最大摆动距离与其安全通过障碍物的距离之和设为安全距离,且对蚁群算法的启发函数、适应度函数、信息素更新公式等进行了改进,使其应用于桥式起重机三维环境的吊装路径规划。Matlab仿真研究结果证明了该方案的可行性与有效性。
机器人; 桥式起重机; Srinivas算法; 三维吊装;路径规划; 蚁群算法; 栅格法
0 引言
机器人领域的三维路径规划大多基于智能算法来实现[1-6]。而在起重机方面,文献[7]基于云计算来实现路径规划;文献[8]设计了一个智能起重机系统,此系统利用OSG与VC++相结合实现对起重机进行三维图形建模、起重机组装、仿真及路径规划等功能;文献[9]~文献[10]根据导航系统进行起重机的三维路径规划;文献[11]建立了一个三维自主移动桥式吊车系统,此系统包括视觉系统、规划系统和控制系统,可以实现识别障碍和在线路径规划。但这些研究存在以下问题:在规划算法的目标函数建立时并未考虑起重机所吊重物在运行过程中的摆动问题;只研究了一个及两个障碍物时的路径规划,障碍物较多时算法的实用性未知;其规划算法中需要根据经验来选取,不能适用于所有的环境条件。
1 环境模型建立
本文研究的是静态环境且障碍物已知的全局三维路径规划。根据桥式起重机的规格(起重质量≤50 t,跨度为22 m,吊钩型,吊钩的起升高度为16 m),规划其三维的作业环境模型,在路径规划时将重物和吊钩看作一个质点。
桥式起重机运动范围有限,其极限位置都安装有限位器。鉴于此,本文将环境模型中的跨度设置为21 m,将环境模型中的起升高度设置为14 m。环境模型中的障碍物是由根据障碍物高度而设置的高度矩阵来实现的。
由于桥式起重机在吊装过程中大小车加、减速时可能引起重物摆动,而重物摆动时极易与障碍物发生碰撞而导致事故发生,若所吊重物是钢水则更是在安全和经济利益上都可能造成重大影响。因此将安全距离设置为d=d1+d2。其中,d1为表示吊钩与重物的质点安全避障的距离,设为0.5m;d2为重物发生最大摆动(保证安全的前提下)时所产生的距离,d2=L×sinθ。其中,L为绳长,本文取1.05 m;θ为安全情况下的最大摆角,本文取5°。将其融入蚂蚁最大横向变动中,具体见2.1节。桥式起重机动力学模型如图1所示。
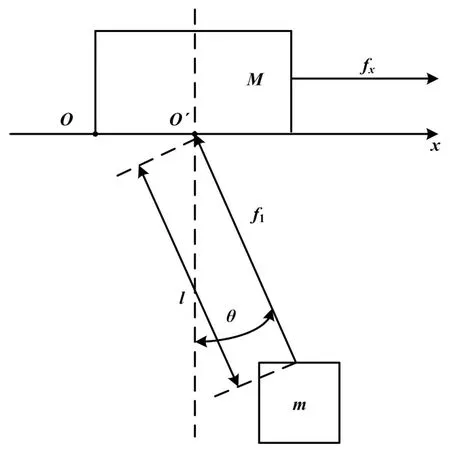
图1 桥式起重机动力学模型
在进行路径规划时,要对三维空间进行栅格化处理,以便后续计算。若将立方体ABCD-A′B′C′D′看作规划空间,对其x、y、z轴长度进行等分,沿x轴进行等分得到n+1个平面,沿y轴进行m等分,沿z轴进行l等分。通过栅格化空间,使得空间ABCD-A′B′C′D′离散为一个三维点集合。集合中,任意一点的序号坐标为O1(i,j,k),位置坐标为O2(xi,yj,zk),i、j、k分别为点O沿x、y、z轴的划分序号。其对应关系如下所示:
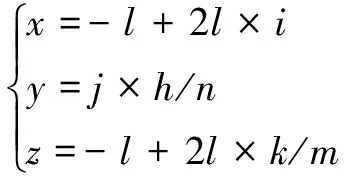
(1)

(2)
2 三维吊装路径的规划算法
2.1 可视搜索空间
本文研究的三维路径规划以x轴为主要方向,即表示桥式起重机吊钩与重物的质点继续前进的方向。规定其吊装路径只能由向前、横向、纵向三个方向的运动组成,以降低路径规划的难度和提高算法的效率。限制其三个方向的最大长度分别为Lx,max,Ly,max,Lz,max。在最大横向移动允许距离中,加入起重机所吊重物的安全距离d,即Ly,max-d,从而使其运行更安全。当蚂蚁行走至点O(i,j,k)时,对下一步搜索的可视域如图2所示。
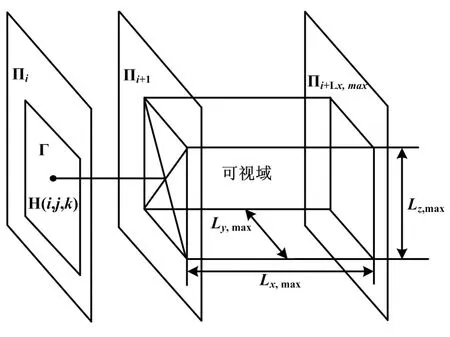
图2 蚂蚁搜索可视域
2.2 蚂蚁搜索策略

②采用轮盘赌法来选择路径点,其任一点(i+1,u,v)的转移概率为:
(3)
④适应度函数是基于路径长度和起吊高度的函数,其在程序中的计算公式为:
2.3 算法流程
三维吊装路径的规划算法流程如图3所示。
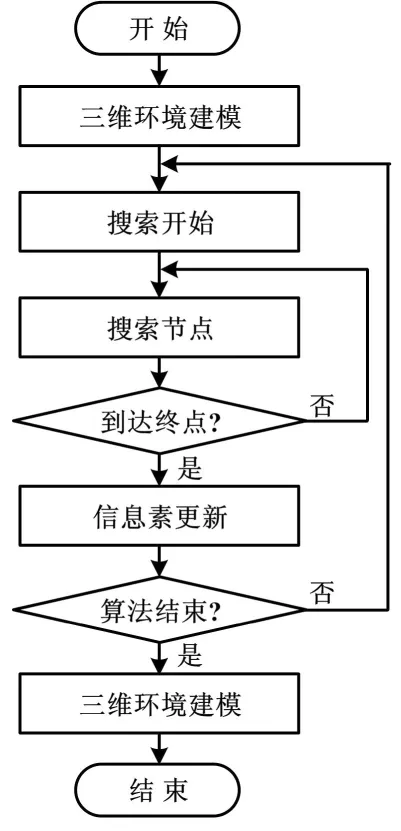
图3 算法流程图
3 仿真研究
在Matlab 2012b环境中进行仿真研究。由于空间栅格划分的大小对路径质量与算法的搜索效率有直接关系,本文设置为吊装路径空间为20×20×1 400。设定起点为(1,12,400),终点为(21,12,400)。算法涉及到的参数有:种群数量为10;蚂蚁最大横向变动1.413;蚂蚁最大纵向变动为2;最大迭代次数为100。最佳个体适应度变化趋势如图4所示。
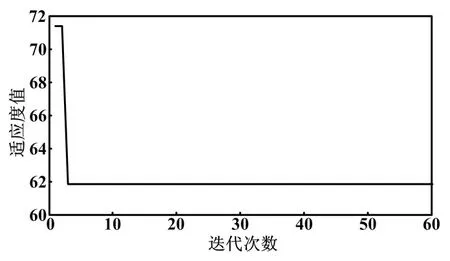
图4 最佳个体适应度变化趋势
由本算法进行的仿真试验所用时间为4 s,说明本算法有较快的收敛速度。整个规划路径为一条无碰撞路径,且是基于路径长度和起吊高度的适应度函数而形成的,因此路径为最短。由图4可知,规划路径的适应度值在5代左右就已经达到最优。因此,仿真结果证明了本算法的有效性与高效性。
4 结束语
通过环境建模、可视区域的设定,以及对算法中的适应度函数、启发函数、信息素更新公式的改进,在Matlab仿真环境中实现了路径规划,且本算法迭代次数少,可以很快找到最佳适应值。智能算法的应用使得本算法的适用性更强,在障碍物较多时仍能规划出安全无碰撞路径。在规划算法中考虑了所吊重物的摆动问题,使得规划路径更安全。
[1] 禹建丽,程思雅,孙增圻,等.一种移动机器人三维路径规划优化算法[J].中南大学学报(自然科学版),2009,40(2):471-477.
[2] 魏代俊,向长城.粒子群算法在三维空间机器人路径规划中的应用[J].南京师范大学学报(工程技术版),2008,8(3):77-81.
[3] 高守玮,杨叶青,张卫东.基于改进蚁群算法的巡航导弹三维航迹规划[J].上海交通大学学报,2010,44(9):1292-1296.
[4] FILIPPIS L,GUGLIERI G,QUAGLIOTTI F.Path planning strategies for UAVS in 3D environments[J].Journal of Intelligent & Robotic Systems,2012,65(1):247-264.
[5] TORRES M,PELTA D A,Verdegay,et al.Path planning with unmanned aerial vehicles for 3D terrain reconstruction[J].Expert Systems with Applications,2016,55(C):441-451.
[6] HAIBIN D,YAXIANG Y,XIANGYIN Z,et al.Three-dimension path planning for UCAV using hybrid meta-heuristic ACO-DE algorithm[J].Simulation Modelling Practice and Theory,2010,18(8):1104-1115.
[7] 中南大学.一种基于云计算的起重机三维仿真路径规划方法:CN201310426717.8[P].2014-01-08.
[8] 范卿,曾杨,胡玉茹,等.起重机大型工程吊装方案规划系统设计[J].起重机运输机械,2015,(10):27-32.
[9] GHANG L,JOONBEOM C,SUNGIL H,et al.A BIM- and sensor-based tower crane navigation system for blind lifts[J].Automation in Construction,2012,26(10):1-10.
[10]GHANG L,HONG-HYUN K,CHI-JOO L,et al.A laser-technology-based lifting-path tracking system for a robotic tower crane[J].Automation in Construction,2009,18(7):865-874.
[11]NAGAI S,KANESHIGE A,UEKI S.Three-dimensional obstacle avoidance online path-planning method for autonomous mobile overhead crane[C]//International Conference on Mechatronics & Automation,IEEE,2011:1497-1502.
Three Dimensional Hoisting Path Planning for Overhead Crane
LI Xiaojin,CHEN Zhimei,SHAO Xuejuan
(School of Electronics Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
Mostly,the research on overhead crane hoisting path planning is carried out in the 2D environment,less research in three-dimensional environment is found;and at present,most of the 3D path planning methods are the Srinivas algorithm based on navigation In this algorithm,the parameters are determined according to the experience,and it is difficult to select the optimal values under different environments.Moreover,the obstacles of environmental model are only about two or so,and it cannot be proved that in the environment with more obstacles,it is still possible to ensure the optimal path and safe collision avoidance.In view of the advantages of the intelligent algorithm and the successful application in the field of robots,the 3D hoisting path planning scheme based on improved ant colony algorithm is proposed.The 3D static working environment model of the overhead crane is established,using the grid method to divide the space,the sum of the maximum swing distance of overhead crane with hoisted weight and the distance of safety going through the obstacle is used as a safe distance;and the heuristic function of the ant colony algorithm,the fitness function,and the pheromone update formula are improved for adopting in hoisting path planning in 3D environment of the overhead crane.Matlab simulation results verify the feasibility and effectiveness of the proposed scheme.
Robot; Overhead crane; Algorithm of Srinivas; Three-dimensional hoisting; Path planning; Ant colony algorithm; Grid method
山西省自然科学基金资助项目(2014011020-2、2014011020-1)、太原科技大学研究生创新项目(20151008)
李小瑾(1991—),女,在读硕士研究生,主要从事桥式起重机智能吊装路径规划及其轨迹规划的研究。E-mail:305857199@qq.com。 陈志梅(通信作者),女,博士,教授,主要从事机电一体化、起重机械等方向的研究。E-mail:zhimeichen400@163.com。
TH21;TP273
A
10.16086/j.cnki.issn1000-0380.201703024
修改稿收到日期:2016-01-20
