基于PLC的船舶压载舱监控系统设计
2017-03-23施海涛
陈 进,施海涛,李 桥
(1.江苏大学机械工程学院,江苏 镇江 212013;2.江苏远望仪器有限公司,江苏 泰州 225300)
基于PLC的船舶压载舱监控系统设计
陈 进1,施海涛1,李 桥2
(1.江苏大学机械工程学院,江苏 镇江 212013;2.江苏远望仪器有限公司,江苏 泰州 225300)
以MCGS组态软件和ABBAC500系列PLC为核心,建立了具有数据采集、数据处理、设备执行以及上位机显示功能的监控系统。系统以船舶压载舱液位、船舶吃水、压载泵进出口压力等参数作为监测对象,通过使用PLC控制压载舱阀门、压载泵等设备,运用模糊PID算法进行阀门控制。利用MCGS组态软件来开发上位机监控界面,主要包括系统的主控界面、参数的设置界面、历史数据报表和报警记录等。通过这些界面,用户可以实时监测压载水调节过程中的船体浮态参数和设备的运行状态。试验表明,上位机呈现的画面直观、操作简单,具有良好的人机交互性;下位机程序运行稳定;整个系统能实现预期的功能。
MCGS组态软件; PLC; 压载水调节; 模糊PID; 控制算法; 阀门开度; 人机交互; 监控系统
0 引言
船舶在装卸货物的过程中,会不可避免地出现横向倾斜,为了维持船体的稳定性,工作人员需要根据压载舱的液位和船舶吃水情况计算配载,然后打开压载系统的阀门,不断调节各舱室的阀门开度,对各个压载舱进行排水或者压水。这样的人工调节方式存在如工作效率低、劳动强度大和安全性能不高等缺点[1-2]。为解决这些问题,需要设计新的监控系统,降低人员的劳动强度,提高压载水操作效率。
随着工业自动化水平的迅速提高,通用的组态软件应用到了实际的工程问题中。组态软件强大的界面显示及仿真功能、丰富的功能模块、可编程的命令语言使系统设计周期大为缩短。本文设计了基于MCGS组态软件和PLC的船舶压载舱监控系统。系统能实时显示各舱室液位、船舷吃水、横倾等信息,对故障作出快速预报警和记录,并根据船体实时状态对压载舱阀门作出相应的控制。
1 监控系统总体结构设计
1.1 设计原则
本监控系统参照了中国船级社《钢质海船入级规范2011年修改通报》“电气装置”和“主机、辅助机械”章节中的自动控制系统软硬件的设计规范,同时参照了《浮船坞入级规规范(2009)》和《Rules For Building And Classing Steel Vessels(2010)》中的硬件设计规范。硬件系统的设计遵循性能安全可靠原则,同时兼顾其抗干扰能力和低能耗性能,并遵循可标准化、可扩展性和低成本的原则。
1.2 监控系统结构设计
监控系统结构如图1所示。
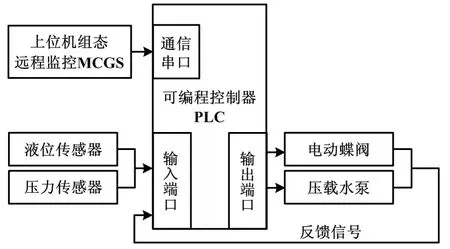
图1 系统结构简图
系统主要由以下模块组成:数据采集模块、数据运算模块、指令执行模块和远程监测模块。数据采集模块用于对系统中压载舱液位、船舷吃水液位、油管压力等参数进行采集;数据运算模块(即可编程控制器PLC)用于对采集得到的信号进行运算处理,根据不同的数据输出相应的信号;执行模块根据PLC发出的控制指令,压载泵和电动蝶阀进行相应的动作;远程监测模块即MCGS上位机组态软件,其对整个系统进行动态监控[3-5]。
2 监控系统软件设计
船舶压载舱监控系统软件设计分为以下几部分:下位机PLC控制软件设计、上位机MCGS组态软件设计、蝶阀开度模糊PID控制算法。PLC控制软件主要实现数据处理、逻辑判断、故障诊断和控制执行等功能;上位机MCGS组态软件主要能够实时显示压载舱室的液位、船舷吃水、油管压力等参数,电动蝶阀阀门开度状态,及时作出预报警和记录。监控系统软件结构如图2所示。

图2 系统软件总体结构图
2.1 PLC软件设计
采用Codesys软件编写系统梯形图,应用于ABB AC500系列PLC。程序编写采用模块化编程和多任务系统,由主程序调用多个子程序来实现阀门的开度控制。PLC控制主程序流程如图3所示。
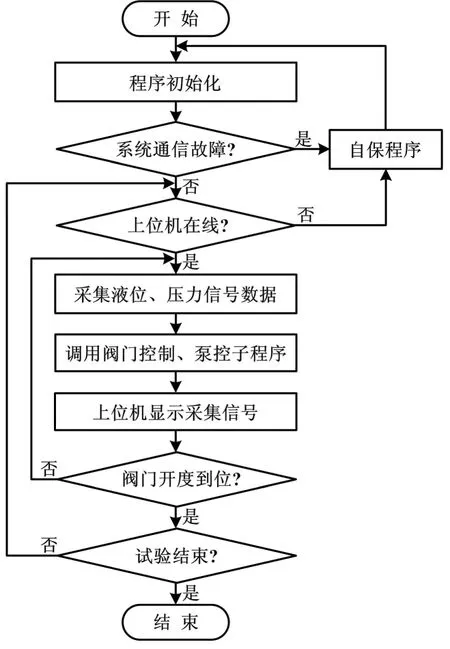
图3 PLC控制主程序流程图
开机之后,系统首先完成初始化工作,对一些参数的初始值进行设置,然后对整个系统的通信状态(上位机/传感器/执行器)进行自检。若通信正常,则进行下一步操作;若通信发生故障,则立刻中断自控程序,启用自保程序。当上位机处于在线状态时,传感器开始实时采集各压载舱液位、船舷吃水和油管压力信号,并送入PLC相应模块,调用相应的阀控、泵控子程序,实现对电动蝶阀和压载水泵的控制。同时上位机实时显示采集到的数据信息以及执行设备的动作情况。若阀门开度未到位,则继续循环,直至阀门开度到位。
2.2 上位机软件设计设计
上位机软件主要是方便操作人员在集控台和驾驶舱实时查看船舶压载舱实时参数,进而对整个压载系统进行操控。上位机软件结构图如图4所示。监控软件主要由用户管理界面、压载舱液位监测、船体横倾监测、故障报警以及报表记录等模块组成[6],可以实现以下功能。
①全面监测系统状态。监控软件实时监测各压载舱液位、船舷吃水、管路压力等信息,实时显示压载水泵以及蝶阀的运行状态。
②人机交互界面。操作人员可以在集控室和驾驶舱通过上位机画面实时显示对下位机发出的控制指令,控制执行设备的运行。
③报警处理。船舶在装卸货物过程中出现报警时,监控软件会发出蜂鸣声,提示操作人员对其进行处理。
④报表记录。监控软件会将实时的液位压力等数据保存下来,方便日后查看和参考。
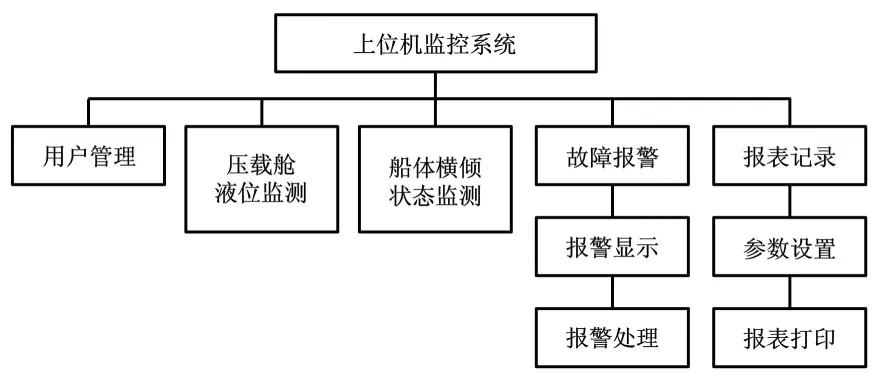
图4 上位机软件结构图
2.3 蝶阀开度模糊PID控制算法
在装卸货物过程中,船舶实现船体平衡的方法是工作人员根据监测到的船舷吃水值,经过判断,手动调节压载舱内的各管路阀门开度,实现各压载舱进水、排水速率的调节。本系统考虑将这种人工调节的方式转化为模糊控制规则,来实现压载水的自动控制。
将传统的PID控制和模糊控制相结合,可以有效地将模糊逻辑推理方法用于调整PID控制的Kp、KI、Kd三个参数。这种控制综合了PID控制和模糊控制的优缺点,具有动态响应更快、超调更小和稳态精度更优的特点[7]。
本系统的模糊PID控制是针对蝶阀开度变量实施控制,以船舶的正浮状态即零倾角为给定值,以船体实际横倾角与给定零倾角的偏差e和偏差变化率ec为模糊控制器的输入,以Kp、KI、Kd三个参数的变化量ΔKp、ΔKI、ΔKd作为控制的输出变量。横倾角θ的计算方法如下:
(1)
式中:T为船舷吃水差;W为船舷吃水测点的水平距离。
由于给定值是正浮状态的零倾角,因此控制器中偏差e即为横倾角值。
设倾角偏差e的基本论域为[-emax,emax],倾角偏差变化率ec的基本论域为[-ecmax,ecmax],输出量ΔKp的基本论域为[-ΔKpmax,ΔKpmax],输出量ΔKI的基本论域为[-ΔKImax,ΔKImax],输出量ΔKd的基本论域为[-ΔKvdmax,ΔKdmax]。e、ec、ΔKp、ΔKI、ΔKd的模糊集合的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},e、ec、ΔKp、ΔKI、ΔKd的模糊集均为{负大、负中、负小、零、正小、正中、正大},对应语言变量值分别为{NB,NM,NS,ZO,PS,PM,PB},ΔKp、ΔKI、ΔKd的模糊控制规则表[8]如表1所示。
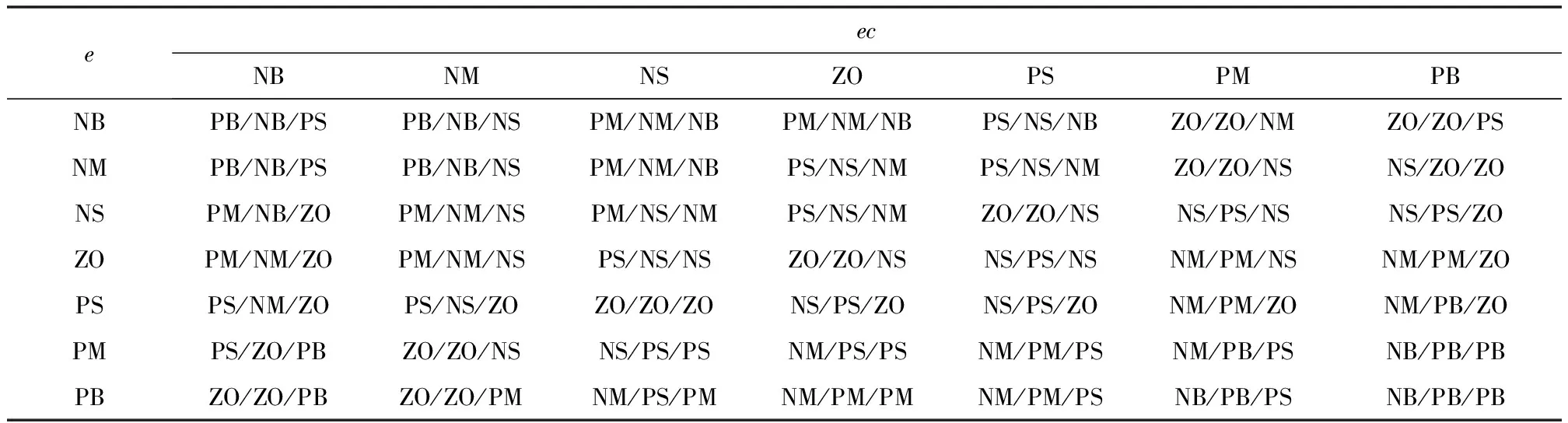
表1 ΔKp、ΔKI、ΔKd的模糊控制规则表
表1中,如果横倾角偏差为NB、偏差变化率为NB时,说明实际横倾角度小于给定值且有继续变小的趋势,所以比例增益ΔKp选择正大,即PB,减小静态偏差;积分增益ΔKI选择负大,即NB,快速消除偏差;微分增益ΔKd选择正小,即PS,减小超调量,稳定系统。如果横倾角偏差为NM,偏差变化率为PS,说明实际横倾角度小于给定值且有缓慢变大的趋势。此时,ΔKp选择正小,即PS;ΔKI选择负小,即NS;ΔKd选择负中,即NM。其能够使系统具有较小的超调量、一定的响应速度,并且确保系统具有良好的稳定性。若偏差为PS,偏差变化率为PB,ΔKp、ΔKI、ΔKd分别是负中、正大、零,则可减小系统的输出震荡、提高系统的抗干扰性。
3 试验室试验与运行
2015年5月,在远望仪器有限公司试验室进行系统运行测试。系统开机后,输入登录密码,进入压载系统主界面。界面中,压载舱的分布与实际压载系统接近,首先点击参数设置按钮,对舱室的比重、盲区值进行调整。旋动液位模拟器旋钮,对应舱室的液位发生明显变化。当液位超过系统预设的高位、低位报警值,实时报警窗口就会弹出,显示对应舱室实时液位信息。点击压载历史报表按钮,进入历史报表界面查看不同舱室的液位报警信息。点击不同舱室BWV按钮时,弹出是否开闭以及复位阀门对话框,等待20 s,若无任何操作,则默认此次阀门操作无效。经过运行,该系统可以实现以下基本功能:①压载系统监控;②全面监测船舶运行过程中的重要参数;③故障报警且数据以报表的形式实时显示在界面中;④界面上的按钮可以实现不同画面的切换。
4 结束语
船舶压载舱监控系统能够实时采集、显示各压载舱液位和船舷吃水等数据。根据采集到的信号对蝶阀以及压载水泵进行控制。组态软件强大的人机交互界面,方便操作人员实时了解船体运行状态,及时作出预报警和记录。模糊PID控制算法的运用,提高了阀门开度控制的精确度。基于PLC的监控系统能够适应恶劣的船舱环境,减少故障率,具有良好的稳定性。试验室的调试结果表明,该系统工作稳定,性能优良,达到了预期的设计目标。
[1] 赵晓变. 液位遥测在监测船舶装卸安全方面的应用研究[D].大连:大连海事大学,2013.
[2] 陈进,刘仕杰,李桥,等. 基于力控的焓差室内空调器性能测试监控系统[J].计算机测量与控制,2014,22(4):1079-1082.
[3] 刘仕杰. 船舶柴油机供油单元监控系统的设计与研究[D].镇江:江苏大学,2014.
[4] 陈进,季圆圆,李耀明. 基于PLC和触摸屏的联合收割机监控系统设计[J].仪表技术与传感器,2014(7):78-81.
[5] 周少华,周根明,郭霆,等. 浮船坞沉浮自动控制系统的设计与实现[J].船舶工程,2013,35(5):55-58.
[6] 石辛民,郝整清. 模糊控制及其Matlab仿真[M].北京:清华大学出版社,2008.
[7] 姜海涛,王超. 基于PLC的PID控制[J].计算机系统应用,2012(21): 144-147.
[8] 徐鹏. 船舶气动式抗横倾装置自动控制系统控制策略的研究[D].大连:大连海事大学,2010.
Design of the PLC-Based Monitoring System for Ballast Tank of Ship
CHEN Jin1,SHI Haitao1,LI Qiao2
(1.School of Mechanical Engineering,Jiangsu University,Zhenjiang 212013,China;2.Jiangsu Yuanwang Instrument Co., Ltd.,Taizhou 225300,China)
With MCGS configuration software and AC500 series PLC from ABB as the core,the monitoring system integrating the functions of data acquisition,data processing,equipment execution and host computer display is built. The monitored objects of the system are the parameters of water level of ballast tank of ship,4-corner of draft,inlet and outlet pressures of ballast pump;the ballast tank valves,and pumps,etc.,they are controlled by PLC and fuzzy PID algorithm. The monitoring interface of host computer is developed by using MCGS configuration software,mainly includes main control interface,parameter setting interface,historical data report and alarm records,etc. The hull floating parameters and operational status of the equipment in regulation process of ballast water can be monitored in real time through these interfaces. The tests show that the displays provided in host computer are intuitive,the operation is simple,the man machine interaction is excellent;the program in slave computer is running stably;thus the overall system implements the expected functionality.
MCGS configuration software; PLC; Reguration of ballast water; Fuzzy PID; Control algorithm; Valve opening; Man machine interaction; Monitoring system
陈进(1959—),女,博士,教授,主要从事系统监测与智能控制方向的研究。E-mail:chenjinjd126@126.com。
TH86;TP27
A
10.16086/j.cnki.issn1000-0380.201703008
修改稿收到日期:2016-03-09
