同位升降控制系统设计与实现
2017-03-23荆红莉
赵 鹏, 荆红莉
(榆林学院能源工程学院,陕西 榆林 719000)
同位升降控制系统设计与实现
赵 鹏, 荆红莉
(榆林学院能源工程学院,陕西 榆林 719000)
针对两个电动推杆难以精确同位控制的问题,以单片机为控制器,电动推杆为被控对象,结合电源电路、驱动电路、RS-232接口电路、超声波测距模块及红外光电传感器,提出了同位升降控制系统,实现了对两个电动推杆的独立有线测控装置的一键式启动控制。该系统在单杆推力为20 kg时,具备在高度为0~300 mm,速度为3~40 mm/s范围内到达随机设定的高度、速度的控制功能;具备在同一位置随机设定高度的往返控制功能;具备在不同初始条件下的快速同位功能。该系统上位机界面利用VC++编写,通过RS-232总线与单片机交互,实现对同位升降控制系统工作状态的实时显示和在线控制功能。采用主从机独立控制系统使系统性能稳定,对农业机械、医疗、消防、家具、卫生洁具、休闲等多个领域的应用有一定的借鉴作用。
单片机; 主从机;光电传感器; PLC; 控制系统; RS-232
0 引言
农业机械(如玉米剥皮机工作台、车载式施肥机肥量控制系统、磨辊离合的电动磨粉机等)、医疗设备(如电动护理床、手术床,日常家用设备如按摩椅、电动展台、电动天窗及人体工程家具等)都需要利用电动推杆作为被控对象,实现同位控制。电动推杆以电机为动力源,通过一对齿轮传动变速,带动一对丝杆、螺母转动,将电机的旋转运动转化为直线运动。其具有良好的线性特性,内部含有行程保护装置,能自动保护本机,安全性极高,在很多场合优于机械式、气动式、液压式执行机构。但市面上大多数同位升降控制系统智能化程度较低,系统功能单一,已成为制约后续产品发展的瓶颈。本设计将电动推杆的工作模式、速度等通过PC机与单片机实时显示,并可以利用按键在线调节控制参数,对实物调试过程中存在的问题提出改进措施,使系统性能更加稳定。
1 方案对比与结构分析
1.1 方案对比
①基于PLC的控制系统稳定性好,无需设计驱动电路和RS-232接口电路。上位机显示界面利用组态王设计更为专业,但识别超声波测距模块的信号较为复杂。下位机的显示器需采用触摸屏,且触摸屏接口RS-232被上位机占用,对于高度的设定需采用位置开关检测,控制系统体积大、成本高。
②利用单片机作为控制器,所需外围电路虽要自行设计,但与超声波测距模块、红外光电传感器的电平标准一致,接口设计简单。下位机采用图形液晶显示器显示,控制系统体积小、成本低。
③对于系统速度与高度测量,一方面,利用霍尔传感器采集电动推杆中电机转速,根据丝杆间距与丝杆速度比计算出当前速度与高度;另一方面,利用超声波测距模块测量当前高度并计算实时速度。前者控制精度受到各方面的制约,误差较大;后者采用直接测量的形式,控制简单且精度高、对于不同类型的电动推杆通用性强[1-2]。
1.2 结构分析
本设计由主机和从机两部分组成。主从机控制器均采用国产宏晶科技推出的STC89C52单片机。系统结构如图1所示。
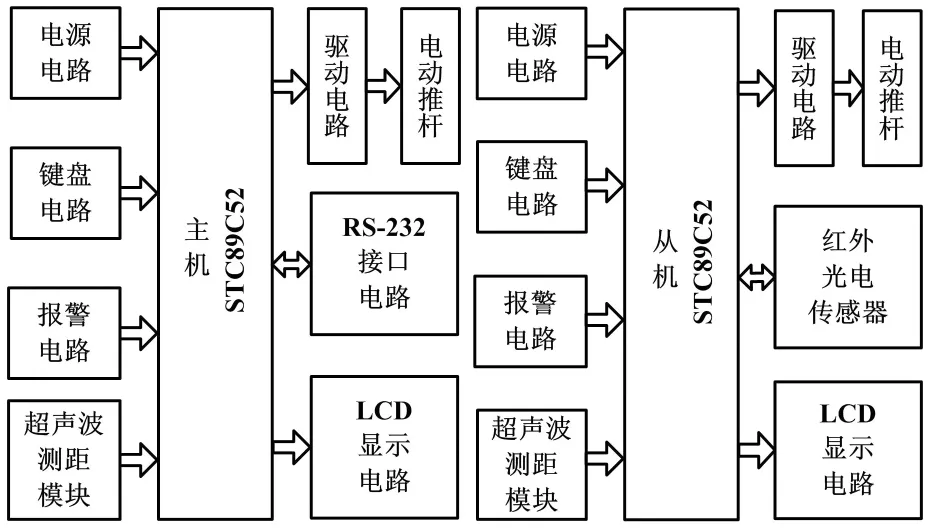
图1 系统结构框图
主机实现信号的采集、变换、处理、显示及对被控对象的控制,从机根据红外光电传感器检测主机的状态,并设定程序作出相应动作。电源电路是系统正常运行的前提;键盘电路实现同位升降控制系统的一键式启停、高度、速度的设置及模式切换功能;报警电路实现系统完成设定运行状态后的提示;超声波测距模块用来进行伸缩高度的测量;LCD显示电路显示当前电动推杆的高度、运行速度及工作模式;RS-232接口电路通过RS-232总线,实现单片机与上位机的通信;由于单片机输出电流较小,不足以驱动外围设备,需经驱动电路连接至电动推杆。
主从机的硬件设计非常相似,可便于印刷电路板(printed circuit board,PCB)布局、布线和程序移植。
2 硬件设计
2.1 电源电路设计
本设计的电动推杆需要12 V直流电压驱动,单片机及外围设备的正常工作则需要5 V直流电源供给,将市电电压经变压、整流、滤波及稳压环节转换为所需的直流电压。整流电路部分采用硅桥整流器KBU610,其平均整流输出电流为6 A。
设u为整流输出电压,U2为变压器变压后的有效值,整流输出电压的平均值U为:
(1)
整流后的输出u可利用傅氏级数分解为:
(2)
脉动系数S为基波峰值与平均值之比,则其表达式为:
(3)
由u的傅氏级数展开式可知,整流后的输出为脉动直流电,通过滤波使其平滑。滤波电路采用LC-π型滤波,其综合了电感滤波和电容滤波的优点,滤波效果较好。由于电感的直流电阻小、交流阻抗大,因此直流分量经过电感后基本无衰减,而交流分量经过jwL分压后,降低了输出电压的脉动成分。稳压则采用三端稳压器实现。
2.2 控制电路设计
主机控制电路以STC89C52单片机为控制器,主要包括驱动电路、键盘电路、RS-232接口电路、超声波测距模块及LCD显示电路等。
电动推杆的核心为永磁无刷直流电机,利用L298电机驱动芯片驱动,其工作电压最高可达46 V,瞬间峰值电流可达3 A,持续工作电流为2 A,内含两个H桥的全桥式驱动器。利用单片机定时器设置占空比改变电枢电压,实现脉宽调制(pulse width modulation,PWM)调速。通过单片机接口的高低电平控制驱动芯片的输出极性,实现对电动推杆的升降控制[3-4];键盘电路的设计利用独立键盘实现系统功能的设置;RS-232接口与单片机的电平标准不一致,前者为RS-232电平,后者为TTL电平,需要经过MAX232实现电平的转换后,才能与上位机交互;超声波测距模块经单片机标度变换,实现对升降系统高度的实时测量;蜂鸣器电路实现系统完成相应设置任务后的提示;显示电路利用图形液晶LCD12864显示,采用串行工作方式,节省了单片机的I/O资源。
从机电路的设计与主机相同,其区别在于从机无RS-232接口,需通过红外光电传感器检测主机状态,实现一键式启动。红外光电传感器输出的TTL电平,与单片机兼容,可直接相连。
3 软件设计
3.1 主程序设计
主程序是控制单片机系统按预定操作方式运转的程序,它负责组织调用各子程序模块。串口通信设置主要是对单片机中的SCON、SBUF特殊功能寄存器的设置;模式切换、高度及速度设置则通过键盘电路实现。主程序流程如图2所示。
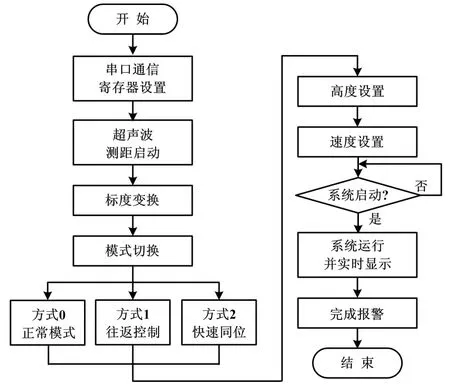
图2 主程序流程图
3.2 标度变换
为了将采集的数字量在LCD上显示成带有被测单位的具体数值,必须进行标度变换。在高度测量中,利用超声波测距模块的TRIG引脚,启动测距模式,模块自动发送八个40 kHz的方波,信号遇障碍返回,ECHO输出高电平,其高电平持续时间则为超声波发射到返回的时间。高度h的计算公式为:
h=(th×340)/2
(4)
式中:th为高电平时间;340为声速,m/s;由于超声波为往返传输,故除以2。
系统速度的设置采用PWM原理,利用单片机定时器T0,设定脉冲宽度为t、脉冲周期为T、占空比D=t/T[5],则电动推杆的升降速度为:
Vd=Vmax×D
(5)
式中:Vmax为电动推杆的最大升降速度,由电动推杆厂商资料知当驱动电压为12 V时,最大速度Vmax取40 mm/s[6]。
电动推杆的控制符合经典控制理论的基本特点。利用超声波测距模块测量当前速度,利用PID控制算法实现对其速度的稳定控制。PID控制结构如图3所示。

图3 PID控制结构图
根据电动推杆的特性,得出电机转速与电压、丝杆位移的传递函数。利用单片机软件结合PID算法,实现速度的稳定控制[7-8]。
4 系统调试及存在问题分析
4.1 系统调试
上位机界面利用VC++中的MSComm控件编写,通过MSComm控件发送到下位机的数据必须是字符串类型,以9 600 bit/s与上位机通信。如果下位机有数据传送到上位机,应用程序将触发OnComm事件,对上传的数据进行处理[9-10]。
当电动推杆工作在正常工作模式下,对设定高度与实际运行高度进行对比。对其中每组数据测量5次并取平均值,高度测量结果如表1所示。
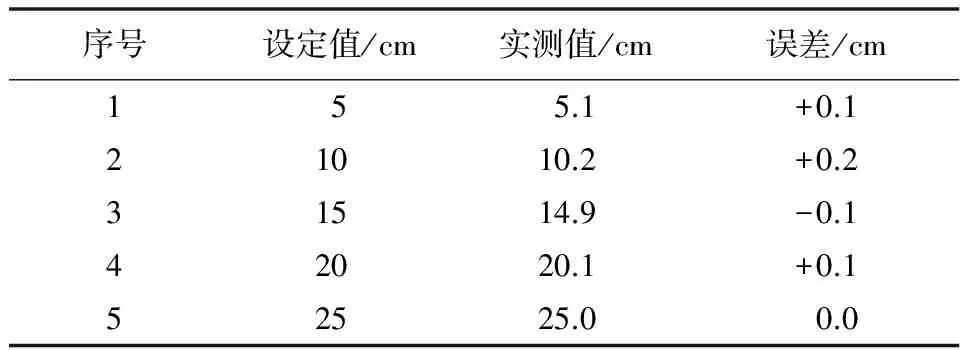
表1 高度测量结果表
由表1可知,高度误差范围在±0.2 cm内。存在误差的主要原因在于PID控制较为简单,单片机无法处理浮点数据,故精度不高。
4.2 调试过程中的问题分析
4.2.1 驱动芯片L298上电后击穿
电动推杆的升降速度与所加的电压有关,电压越高、速度越快。如果设计中利用开关电源,即应使额定电压在L298的耐压范围内。由于开关电源上电瞬间电压大于L298的耐压值,导致L298被击穿。利用本设计中的线性直流稳压源,可以防止该类问题的出现。此外,对于不同厂商规格型号一致的驱动芯片,其耐压值也不同,因此在采购中应优先考虑正规产品,同时使用散热卡。
4.2.2 超声波测距的精度及系统安装
在一个标准大气压下,声速随温度近似成正比变化。当温度为15 ℃时,声速约为340 m/s。每增加1 ℃,声速增加0.607 m/s。夏季当温度为35 ℃时,声速为352 m/s;冬季当温度为-20 ℃时,声速为319 m/s。本设计选用声速为340 m/s,测量误差为±0.3 cm。由于超声波有一定的散射角度,为了防止电动推杆杆体和底部对散射波的影响,超声波测距模块应安装于电动推杆顶部(突出10 cm左右),底部安装挡板,防止散射波对高度测量的影响。
5 结束语
本设计为两个独立的同位升降控制系统,即系统之间无数据传输,为完成一键式启动,从机采用红外光电传感器检测主机的状态。当主机启动时,从机也随之按设定的模式运行。若设计为一个控制系统,根据驱动器L298的特性,可直接扩展出另一路电动推杆的接口,而
且控制较为简单,但电动推杆的功率会受影响。测距模块中如果使用红外测距传感器,则无需考虑散射角度和温度的影响,使整个系统外形更加美观。
[1] 王海霞,颜桂定,李宝辉,等.直线电机运动控制系统的软件设计与实现[J].电子测量与仪器学报,2013,27(3):264-269.
[2] 王悦,姜寿山,付永升,等.云台控制在旋转扫描式人体非接触测量中的应用[J].计算机工程与科学,2015,37(7):1412-1416.
[3] 徐富新,向超,刘雁群,等.实验室测试数据实时收发系统的设计与实现[J].计算机工程与科学,2015,37(4):704-710.
[4] 朱凤武,岳仕达,于丰华,等.基于电动推杆的玉米剥皮机角度角度控制系统[J].吉林农业大学学报,2014,36(3):366-370.
[5] 周鹏飞. 基于嵌入式的推杆电机控制系统设计[D].西安:长安大学,2015.
[6] 郭哲. 全方位运动电动轮椅的系统设计与研制[D].杭州:浙江大学,2014.
[7] 范文超,陈兴林,王斌,等.光刻机运动平台系统的模型辨识[J].自动化仪表,2015,36(5):7-11,18.
[8] 罗锡文,单鹏辉,张智刚,等.基于推杆电动机的拖拉机液压悬挂控制系统[J].农业机械学报,2015,46(10):1-5.
[9] 董凯莉,吴杰峰,刘志宏,等.基于VC++的校正场线圈绕制系统的建模与仿真[J].计算机测量与控制,2015,23(12):4031-4033,4037.
[10]张汝彬,苏锋,陈斌,等. 水下视频监控系统的设计与搭建[J].自动化仪表,2016,37(3):35-38.
Design and Realization of the Apposition Lift Control System
ZHAO Peng,JING Hongli
(School of Energy Engineering,Yulin University,Yulin 719000,China)
Aiming at the difficulty of precisely implementing appositive control for two electric putters,taking MCU as the controller and electric putter as the control target;combining with the power supply circuit,driving circuit,RS-232 interfacing circuit,ultrasonic ranging module,and infrared photoelectric sensor,etc.,the one-button startup control of the independent wired measuring and control device composing of two electric putters is realized. The system provides control functions,including reaching randomly setting height and speed within 0~300 mm height,and 3~40 mm/s at 20 kg single rod trust;the back and forth control at the same position of randomly setting height;and the rapid appositive function under different initial conditions. The interface of host computer is written by using VC++,interacting with MCU via RS-232 bus,to realize real time display and online control for operational states of appositive lifting control system. Adopting master/slave independent control system makes the systematic performance stable,it provides certain reference value for applications in agricultural machinery,medical treatment,fire protection,furniture,sanitary ware,and leisure areas.
Micro controller unit(MCU); Master-slave machine; Photoelectric sensor; Programmable logic controller; Control system; RS-232
陕西省教育厅专项科研计划基金资助项目(15JK1864)
赵鹏(1982—),男,硕士,讲师,主要从事数据采集与处理方向的研究。E-mail:zhaopeng9500@126.com。
TH86;TP205
A
10.16086/j.cnki.issn1000-0380.201703009
修改稿收到日期:2016-05-06
