非均匀噪声环境下的滑窗式恒虚警检测器
2017-03-22刘贵如王陆林
刘贵如,王陆林,汪 军,强 俊,邹 姗
非均匀噪声环境下的滑窗式恒虚警检测器
刘贵如1,王陆林2,汪 军1,强 俊1,邹 姗1
(1. 安徽工程大学 计算机与信息学院,安徽 芜湖 241000;2. 奇瑞汽车股份有限公司 前瞻技术研究院,安徽 芜湖 241006)
为了解决传统目标检测算法在非均匀噪声环境下检测性能严重下降的问题,提出了一种自由滑窗式恒虚警检测算法,在被检测单元两侧各取-1个参考单元作为初始自由参考窗,然后从左向右依次滑动次,得到个滑窗,根据滑窗噪声功率的平均值与被检测参考单元功率值的比较结果,选择相应的滑窗噪声功率平均值集合取均值,再乘以参数因子得到比较门限阈值,根据被检测单元的功率与进行比较,确定是否为有效目标。经过与其他算法进行仿真对比,该算法具有最优的检测性能,检测率98.93%,误检率2.28%,并成功应用于车辆开门预警系统,经测试,预警率大于98.10%,虚警率小于2.80%。结果表明,该算法提高了非均匀噪声环境下目标的检测概率,具有良好的检测性能。
信号处理;滑窗式恒虚警;目标检测
0 引言
在基于雷达的实际应用场景中,尤其是车辆主动安全系统,车辆在道路上运行,车辆本身的抖动、道路两边的路牌、栏杆、草木、路面以及行人车辆等均会产生回波以及干扰杂波。而且杂波功率会随着场景的变化而变化[1]。如何采用有效的滤波算法以及目标检测算法对有效的目标车辆进行检测,滤除干扰目标,是车载雷达算法的关键[2-3]。有关雷达算法在军用领域研究的比较多,而针对车载雷达领域近年来随着车辆主动安全技术的快速普及以及智能车热,国内外很多企业和高校均投入人力,物力开始从事这方面的研发。恒虚警技术是雷达目标检测常采用的技术,常用的有单元平均恒虚警方法(cell averaging- constant false alarm rate, CA-CFAR)[4]、有序统计恒虚警方法(order statistic-constant false alarm rate, OS-CFAR)[5]、自动删除单元平均恒虚警检测算法(automatic censored cell averaging -constant false alarm rate, ACCA-CFAR)[6-7]等,各算法的区别就在于设定检测门限阈值的方法。在实际的目标检测中,由于复杂的杂波背景以及各种环境背景噪声的影响,传统恒虚警检测算法有时无法满足实际应用需求,尤其是针对远目标或者被遮挡的目标,检测性能明显下降,如果能够充分利用目标回波信号单元间的信号连续性以及能量积累,同时在背景噪声功率估计时,选择合适的参考单元集,既可以提高算法的目标检测性能,还可以有效降低虚警率[8]。
本文针对ACCA-CFAR算法进行了改进,引入了滑窗,提出了一种滑窗式恒虚警(Sliding Window-Constant False Alarm Rate,SW-CFAR)目标检测算法,通过滑窗参考单元背景噪声功率均值替代单个参考单元与被检测参考单元功率值进行比较,判断被检测单元所处的背景噪声环境,并通过比较选择合适的滑窗功率均值单元集,估计检测功率门限,提高检测性能的同时,还能够有效降低虚警率。不仅能很好地保持恒虚警率,而且可以提高在目标遮蔽和杂波边缘效应下的目标检测率。
1 SW-CFAR检测算法
1.1 算法实现过程
SW-CFAR检测算法实现过程见图1,其中X(=1,…,)为输入信号;X为被检测的单元;x-为参考单元,其中Î[-2+,+],(=0, 1,…,-1);自由滑窗长度=;Z为第(=0, 1,…,-1)个滑窗;为通过CFAR处理后的杂波功率水平估计;是标称化因子;为提供给比较单元做比较的阈值,判断目标的有无。取输入信号X(=1,…,)序列中其中一单元X作为被检测单元,以此检测单元为中心,再以X左右侧各-1个单元作为初始的自由参考窗体,窗体的长度固定=,窗体从左向右逐个单元滑动(保持窗体长度不变),一直滑移到最右边的-1个单元,总共滑移次,获得个滑窗,计算出每个滑窗的平均值,将这一平均值和被检测单元X做比较,假设小于X且大于0的窗体个数,大于0的窗体个数¢;如果大于/2则计算出这些窗体的平均值作为自由滑窗的最终幅度值,否则计算出所有滑窗的平均值作为自由滑窗的最终幅值。将滑窗的最终幅度值和标称因子做乘法运算,得到判决阈值,最后将被检测单元X与阈值做比较,若X>表示有目标,否则无目标。
1.2 算法实施步骤
该算法不仅能很好地保持恒定的虚警率,而且可以提高在目标遮蔽和杂波边缘效应下的目标检测概率。算法实施步骤如下:
步骤1:取输入信号X(=1,…,)的X检测单元(从1单元开始),确定左右-1个参考单元作为滑窗参考单元,自由滑窗的长度=。
步骤2:分别计算各滑窗的平均值,根据如下公式计算:

式中:Î[-2+,+],(=0, 1,…,-1)。
步骤3:将X与Z(=0, 1,…,-1)单元进行比较,以被检测单元的样本值为门限,滑窗序列中高于此门限的窗体归为一组,而低于该门限的窗体归为另一组。如果较低幅度值的那个组包含的窗体数(不包括窗体幅度值为0的窗体)超过/2,则以低于门限的那一组窗体(不包括窗体幅度值为0的窗体)来进行单元平均处理。如果较低幅度值的那个组的窗体数(不包括窗体幅度值为0的窗体)小于/2,则滑窗内全部窗体(不包括窗体幅度值为0的窗体)用来进行单元平均处理。形式可表示如下:取Z中所有小于X的个数,如果大于/2时,则:
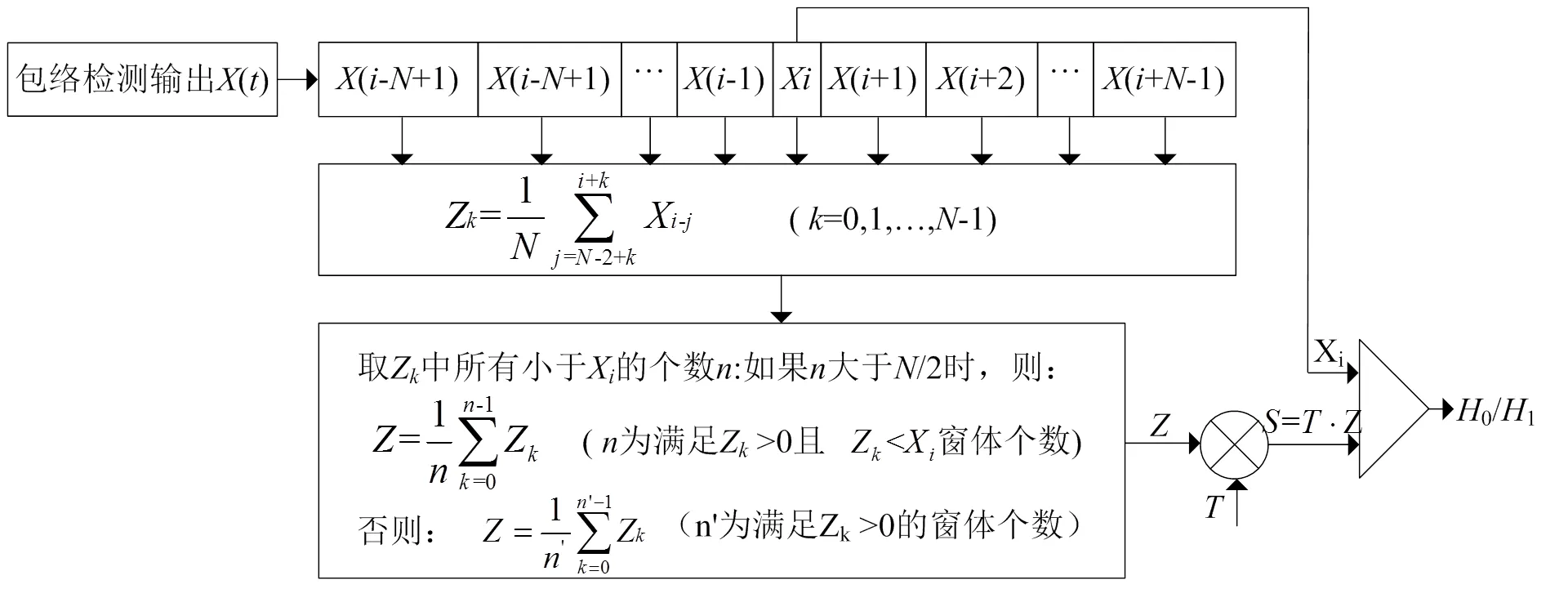
图1 滑窗式恒虚警目标检测算法
Fig.1 SW-CFAR target detection algorithm

式中:为满足Z>0且Z<X的窗体个数,如果小于/2时,则:
式中:¢为满足Z>0的窗体个数。
步骤4:检测概率与标称化因子的关系为:
d=[1+/(1+)]-(4)
式中:是平均功率与噪声功率的比值,当=0时,标称化因子的计算公式为:
=(d)-1/-1 (5)
步骤5:根据确定后的标称的因子送入乘法器单元,计算出检测门限阈值计算公式为:
=×(6)
步骤6:将X与值送入比较器单元进行比较,如果被检测值X>阈值,假设1表示有目标,0表示无目标,目标有无判断方法如下:
X>1;X≤0(7)
步骤7:值加1,并重复步骤1~步骤6,确定值达到结束整个过程。
该算法在目标遮蔽和杂波边缘干扰环境下,均表现出良好的检测性能。
2 仿真与分析
2.1 算法仿真
从车辆开门预警系统实际应用场景中采集的大量信号中抽取812个样本,以样本为各算法的输入,在Matlab环境下对各典型检测算法在时间和空间资源消耗、检测概率和误检概率等几个方面进行仿真对比分析,各检测算法仿真结果见表1,OS-CFAR(order statistic-constant false alarm rate)[8]、ML-CFAR(mean level-constant false alarm rate)[9]、LR-CFAR(large small-constant false alarm rate)[10]算法的时间复杂度()和空间复杂度()相同,均小于SW-CFAR算法,这3种算法虽然对边缘杂波干扰或者瞬间干扰有很好的抑制效果,但是对连续的非均匀背景噪声,检测性能不佳,检测概率(Detection rate,DR)偏低,小于90.00%,误检概率(False detection rate,FDR)偏高,大于9.00%。CA-CFAR[11]检测算法相对稳定,误检率小于5.00%,检测率大于90.00%。改进的SW-CFAR检测算法在各算法优点的基础上进行了改进,不仅对均匀杂波,而且对边缘杂波干扰和瞬间干扰均有很好的抑制效果,误检率最低(2.28%),检测率最高(98.93%),实用性最好。虽然资源消耗较大,但是对目前高性能、大存储空间的嵌入式系统来说,无明显劣势。
2.2 结果对比分析
为了对比分析各算法的检测性能,分别对各目标检测算法的仿真结果进行比较,见图2。
由图2可知,在信噪比大于0dB,小于20dB即中间区域各检测算法的检测性能差异较大,而在信噪比小于0dB,大于20dB的区域,检测性能差异较小。在车辆开门预警实际应用场景中,大多数目标的回波信号信噪比处于中间区域。SW-CFAR检测算法优于其他4个典型检测算法约6dB的信噪比增益,当信噪比为10dB时,检测率仍大于98.00%,而其余各算法检测概率均小于95.00%。
图3为SW-CFAR检测算法经过Matlab仿真后得到的一段噪声平均功率门限曲线。从图3中可以看出,该曲线能够很好地拟合噪声功率的变化,随噪声功率的变化而做出相应的调整,实现恒虚警概率的保持。仿真结果表明:该算法具有较好的平均噪声功率门限阈值的估计性能。

表1 各检测算法仿真结果对比
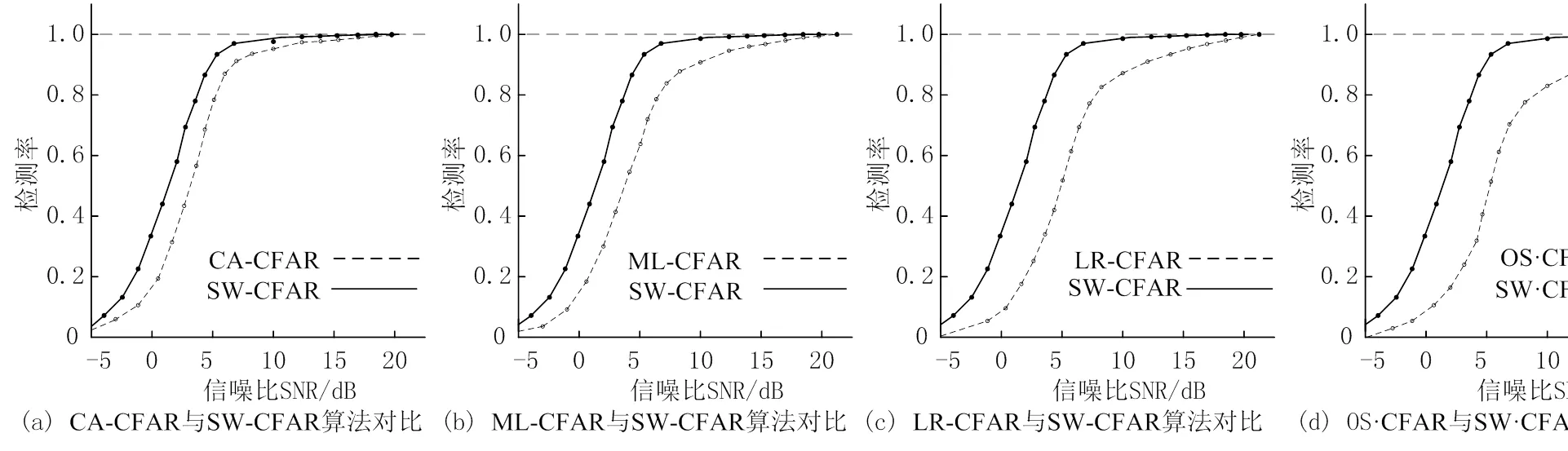
图2 各检测算法检测性能比较
Fig.2 Detection performance contrast
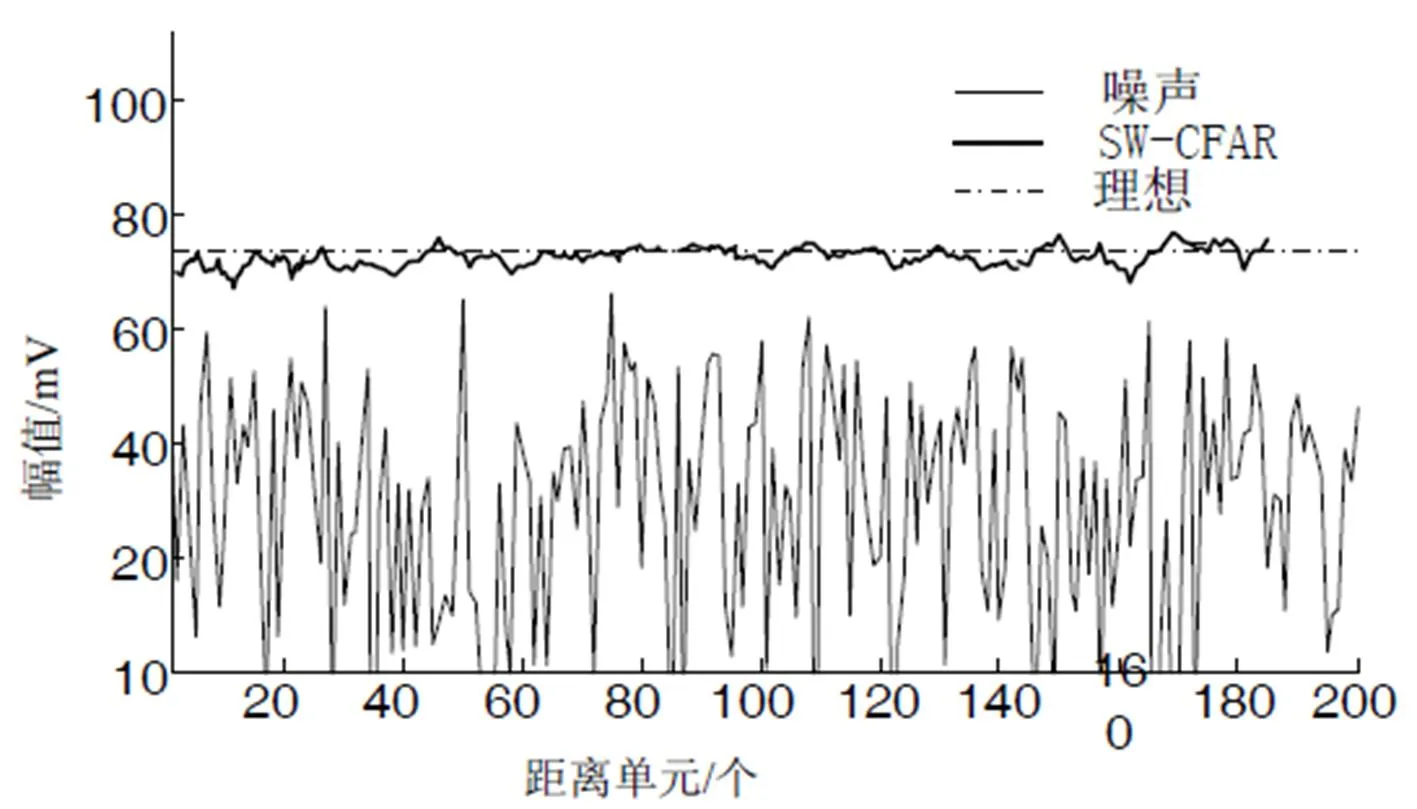
图3 SW-CFAR检测算法仿真结果
3 场景测试与分析
3.1 场景测试
采用SW-CFAR检测算法实现的车辆开门预警系统进行了场地测试和实际场景测试。以电动自行车(包括自行车)、摩托车和四轮以上机动车等3类典型接近目标,设定了危险报警区域见图4。该报警区域在前期开门预警系统测试的基础上根据客户体验及要求,增加了报警区域的纵向距离。同时也将雷达的安装位置由左侧改为中间位置,根据系统实际应用场景,两侧可以兼顾,安装位置见图5。针对电动自行车,雷达安装位置左右向外横向2.5m,向后纵向12.0m的区域为危险报警区域,见报警区域一;针对摩托车,雷达安装位置左右向外横向2.5m,向后纵向17.0m的区域为危险报警区域,见报警区域二;针对四轮以上机动车,雷达安装位置左右向外横向3.0m,向后纵向22.0m的区域为危险报警区域,见报警区域三。针对各个典型接近车辆在实际工况下设定了若干测试点,测试场景见图6。
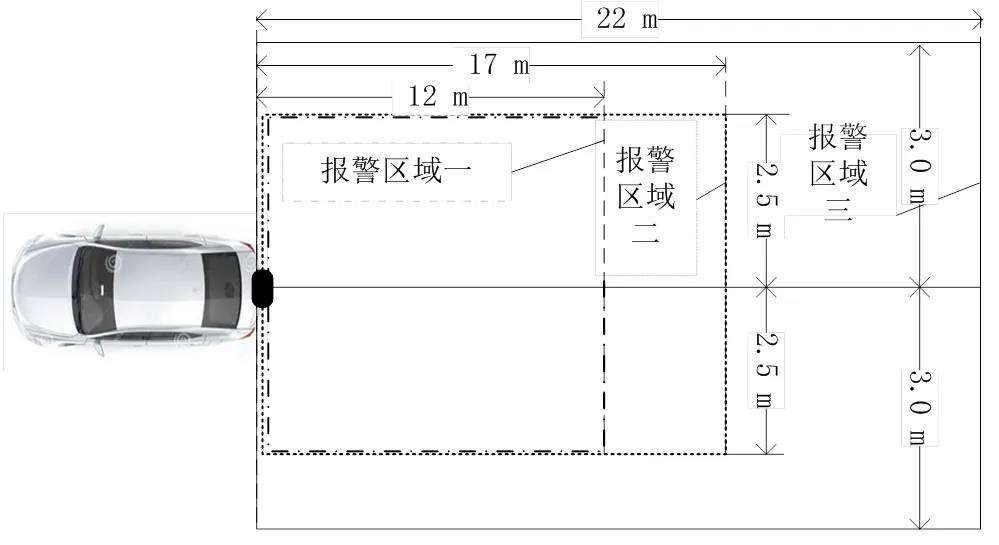
图4 标定的系统探测区域

图5 雷达控制器的安装

图6 针对各典型接近目标的车辆开门预警测试场景
当目标进入报警区域后,系统首先通过安装在车内门把手位置的LED警示灯对驾乘人员进行一级报警提醒。当驾乘人员拨动了门把手,将车门打开的瞬间,系统通过蜂鸣器进行二级报警提醒,提醒驾乘人员要注意后方接近车辆,防止后方接近的车辆,尤其是非机动车撞到车门,非机动车驾驶员受伤、倒地摔伤、甚至被相邻车道驶来的机动车碾压致死,而酿成惨剧。
3.2 测试结果与分析
借助于激光测距仪和高精度摄像机进行了精确的场景测试,测试数据经过分析,各典型接近目标车辆的平均预警率见图7与表2。电动自行车在7.0m、12.0m测试点各测试若干次的平均预警率分别是98.36%,97.90%。摩托车在7.0m、12.0m、17.0m测试点各测试100次的平均预警率分别是98.36%、98.05%、97.89%。轿车在7.0m、12.0m、17.0m和22.0m测试点各测试200次的平均预警率分别是98.88%、98.53%、98.20%、97.67%。自行车测试107次,预警率98.13%,摩托车测试211次,预警率98.10%,轿车测试298次,预警率98.32%。预警率均大于98.10%,虚警率均小于2.80%,测试结果表明,接近目标距离雷达距离越近检测率越高(距离1m以外),距离越远探测率越低。而且探测率与控制器外壳以及雷达在车辆后保内安装位置以及与后保的造型有很大关系,针对不同的车型需要做标定,有针对性的对算法进行修改。测试结果满足车辆开门预警系统指标,可以满足实际应用场景需求,能有效降低开车门事故发生概率。
测试结果满足车辆开门预警系统指标,可以满足实际应用场景需求,能有效降低开车门事故发生概率。
4 结论
本文提出的滑窗式恒虚警(SW-CFAR)检测算法,克服了其他检测算法在目标遮蔽和杂波边缘效应下检测率偏低的问题,各算法以相同的杂波样本为输入,经过Matlab环境下仿真对比分析, SW-CFAR算法除了在时间和空间资源上消耗有所增加外,检测性能最好,当信噪比大于10dB时,检测概率仍高达98.16%,误检概率低至2.58%。该方法成功应用于车辆开门预警系统,并在奇瑞艾瑞泽7车上进行了测试,平均预警率均大于98.10%,虚警率小于2.80%,具有良好的检测性能。但是该算法不具备能量积累的能力,针对低信噪比条件下的弱小目标检测性能偏低,不适合弱目标检测。

图7 各测试点的平均预警率
Fig.7 Average early warning alarm rate of every test points

表2 系统平均预警率测试结果
[1] 简涛, 苏峰, 何有, 等. 复合高斯杂波下距离扩展目标的自适应检测[J]. 电子与信息学报, 2012(5): 990-994.
JIAN Tao, SU Feng, HE You,et al. Adaptive Range-spread target detectors for compound-Gaussian clutter[J]., 2012(5): 990-994.
[2] 程健, 项志宇, 于海滨, 等. 城市复杂环境下基于三维激光雷达实时车辆检测[J]. 浙江大学学报: 工学版, 2014(12): 2102-2106.
CHENG Jian, XIANG Zhiyu, YU Haibin, et al. Real-time vehicle detection using 3D lidar under complex urban environment[J].,2014(12): 2102-2106.
[3] 高振海, 王俊, 佟静, 等. 车载毫米波雷达对前方目标的运动状态估计[J]. 吉林大学学报:工学版, 2014(11): 1537-1544.
GAO Zhenhai, WANG Jun, TONG Jing, et al. Target motion state estimation for vehicle-borne millimeter-wave radar[J]., 2014(11):1537-1544.
[4] Amir Zaimbashi. An adaptive CA-CFAR detector for interfering targets and clutter-edge situations[J]., 2014, 31: 59-68.
[5] Amir Zaimbashi, Mohammad Reza Taban, Mohammad Mehdi Nayebi, et al. Weighted order statistic and fuzzy rules CFAR detector for Weibull Cluttet[J]., 2008, 88: 558-570.
[6] Farrouki A, Barkat M. Automatic censoring CFAR detector based on ordered data variability for non-homogeneous environments[J]., 2005, 152: 43-51.
[7] Naime Boudemagh, Zoheir Hammoudi. Automatic censoring CFAR detector for heterogeneous environments[J]..(), 2014, 68: 1253-1260.
[8] Hilal A, Meziani, Faouzi Soltani. Optimum second threshold for the CFAR binary integrator in Pearson distributed clutter[J]., 2012, 6: 223-230.
Sliding Window CFAR Detector in Non-homogenous Environments
LIU Guiru1,WANG Lulin2,WANG Jun1,QIANG Jun1,ZOU Shan1
(1.,,241000,;2.,.,,241006,)
In order to solve the problem that the detection performance degradation of the conventional target detection methods in non-homogenous environments, a sliding window-constant false alarm rate (SW-CFAR) detection algorithm was proposed. Free units on the both sides of the reference cell under test were set as an initial reference window which was slid N times from left to right to get N sliding windows. Based on the comparison results between the average power value of the sliding window and the power of cell under test, the proper average power value of the sliding windows were selected to obtain free sliding window average power which was multiplied by the factor T parameters to get comparison threshold S. Power comparison results of the cell under test and detection threshold S determined whether there was target or not. According to simulation and analysis comparison results with other algorithms, the proposed algorithm had the best detection performance, whose detection rate was up to 98.93% and false detection rate was down to 2.28%. The algorithm was successfully applied to a vehicle door open warning system, the average early warning rate was up to 98.10% and false alarm rate was down to 2.80%. The experimental results show that the proposed algorithm improves the target detection probability and has a better detection performance in non-homogenous environments.
signal processing,sliding window CFAR,target detection
TN957.51
A
1001-8891(2017)03-0237-06
2016-05-04;
2017-02-28.
刘贵如(1980-),女,讲师,主要从事信号处理、车辆主动安全和多传感器融合研究。
国家自然科学基金资助项目(91120307);安徽省自然科学基金项目(KZ00215072)。
