基于动态人工势场法移动机器人路径规划研究
2017-03-21黄立新耿以才
黄立新,耿以才
(上海工程技术大学 机器人智能控制实验室,上海 201620)
基于动态人工势场法移动机器人路径规划研究
黄立新,耿以才
(上海工程技术大学 机器人智能控制实验室,上海 201620)
考虑机器人与目标点的相对位置以及相对速度因素构建引力势场和引力函数,考虑机器人与障碍物之间的相对位置、相对速度以及相对加速度因素构建斥力势场和斥力函数;基于位置的“分而治之”策略,将机器人所处的环境分解成不同的情景,通过传感器获得周围环境信息,制定并执行情景-运动规则;建立复杂动态机器人仿真环境,验证改进后的算法在动态环境中机器人自动避障的可行性;以IN-RE机器人为实验平台,做动态环境下机器人自动避障路径规划实验,验证文章提出的动态人工势场法在动态环境中的可行性。
动态人工势场;机器人;路径规划;避障
0 引言
智能移动机器人技术是自动化、智能化领域的研究热点之一[1]。机器人在运动过程中,一般情况下障碍物位置是不断变化的,目标点也可能会发生变动[2],随着智能交通的发展、汽车行业的转型及军事等方面的需求,动态环境下的机器人路径规划算法成为急待解决的问题[3]。针对这一问题,本章通过改进斥力和引力势场函数,使得人工势场路径规划算法能适用于动态环境。基于位置“分而治之”策略[4],进行机器人情景-运动规则[6]设计,建立机器人运动仿真环境,并进行实验。
1 动态人工势场法原理
1.1 引力势场与引力函数
假设机器人在自动避障路径规划过程中,目标点以某一速度时刻改变位置,构造引力势场函数时,不仅需要考虑机器人与目标点的相对位置因素,还考虑机器人与目标点的相对速度因素[7],如公式(1)所示:
(1)
其中:Ka和Kv为引力势场正常量[8],d(xR,XG)表示机器人与目标点两者之间的欧式距离[7],矢量方向为两位置连线上从目标点指向机器人,d(VR,VG)为机器人与目标点之间的相对速度。根据引力势场函数可以推出机器人所受到的目标点引力为:
(2)
(3)
(4)
其中:Fatt(X)方向为从机器人位置指向目标点位置,Fatt(V)方向为机器人与目标点的相对速度方向,机器人所受到的目标点引力是FattX(X)和FattV(V)的合力,在机器人自动避障路径规划中,FattX(X)使机器人追踪目标点位置,FattV(V)使得机器人趋向与目标点同速。
1.2 斥力势场与斥力函数
考虑机器人与障碍物之间的位置因素,增加考虑机器人与障碍物之间的相对速度和加速度因素,得出改进后的动态环境下斥力势场函数Urep(X,V,A),如公式(5)所示:
(5)
(6)
(7)
(8)
其中:urep(X)、Urep(V)及Urep(A)分别代表只考机器人与障碍物之间的距离、相对速度和相对加速度因素对机器人所受到的斥力势能;ηX、ηV及ηA为动态环境下斥力势场正比例增益系数;d(XR-XO)表示机器人与障碍物之间的欧式距离,方向是两者位置连线上从障碍物指向机器人;dn表示障碍物对机器人产生斥力作用的影响范围,只有d(XR-XO)≤dn时,机器人才会进行避障操作;eRO为从机器人指向障碍物的单位向量,VRO为机器人和障碍物之间的相对速度在二者之间连线上的分量,VRO=(VR-VR)TeRO。若VRO≤0,则代表机器人离开障碍物,若VRO>0,则代表机器人靠近障碍物。ARO=(AR-AO)TeRO为机器人与障碍物之间的相对加速度在二者之间连线上的分量。
2 情景-规则设计
定义以机器人质点为圆心,(dr+R)为半径的圆形区域为安全区域(Safety-area),R是机器人半径。定义机器人根据规则最终选择移动的区域为目标区域(Goal-area),目标区域根据如下方法确定:首先找出在机器人传感器探测范围内各个障碍物的边缘间隔(gap),然后将相邻的非同一个障碍物之间的边缘区域视为目标区域的备选区域,最后从目标区域的备选区域集合中选取最靠近目标点且机器人可安全行驶的区域作为最终的目标区域。
如图1所示,规定目标点左侧的可行区域为Q1,目标点右侧的可行区域为Q2,区域Q1中靠近目标点的间隔为g1,区域Q2中靠近目标点的间隔为g2;若目标点到g1的垂直距离小于目标点到g2的垂直距离,那么Q1即为最靠近目标点的区域,反之Q2为最靠近目标点的区域。
建立机器人、障碍物和目标点之间相互联系后,根据传感器获得的环境信息,按照如下规则来确定情景集。
规则1:安全规则。本文定义了两种安全系数:当机器人的目标区域中无障碍物时,定义机器人处于高安全系数(High-safety);反之,机器人处于低安全系数(Low-safety)。
规则2:危险障碍物分布规则。定义位于安全区域内的障碍物为危险障碍物,危险障碍物的分布可以分成两种情况:机器人一侧有危险障碍物;机器人两侧都有危险障碍物。
规则3:机器人是否能直接到达目标点规则。根据目标点是否在目标区域中来判断机器人是否能直接到达目标点,分为两种情况:能直接到达和不能直接到达。
规则4:目标区域宽度规则。当目标区域的角度大于预先设定角度(设定为120°)时为宽角度(Wide-angel),反之为窄角度(Narrow-angel)。
根据情景-运动规则确定机器人所处工作环境的情景集。
1)LSNG1(Low-safety no goal 1):根据规则1、2,情景LSNG1表示目标点不在目标区域中,安全区域内存在危险障碍物,且机器人一侧有危险障碍物,如图2所示。

图1 间隔、目标区域及目标区域示意图 图2 LSNG1情景示意图
2)LSNG2(Low-safety no goal 2):根据规则1、2,情景LSNG2表示目标点不在目标区域中,机器人安全区域内存在危险障碍物,且其两侧都有危险障碍物,如图3所示。
3)GG(goal in Goal-area):根据规则1、3,情景GR表示目标点位于目标区域内,机器人能直接到达目标点,如图4所示。
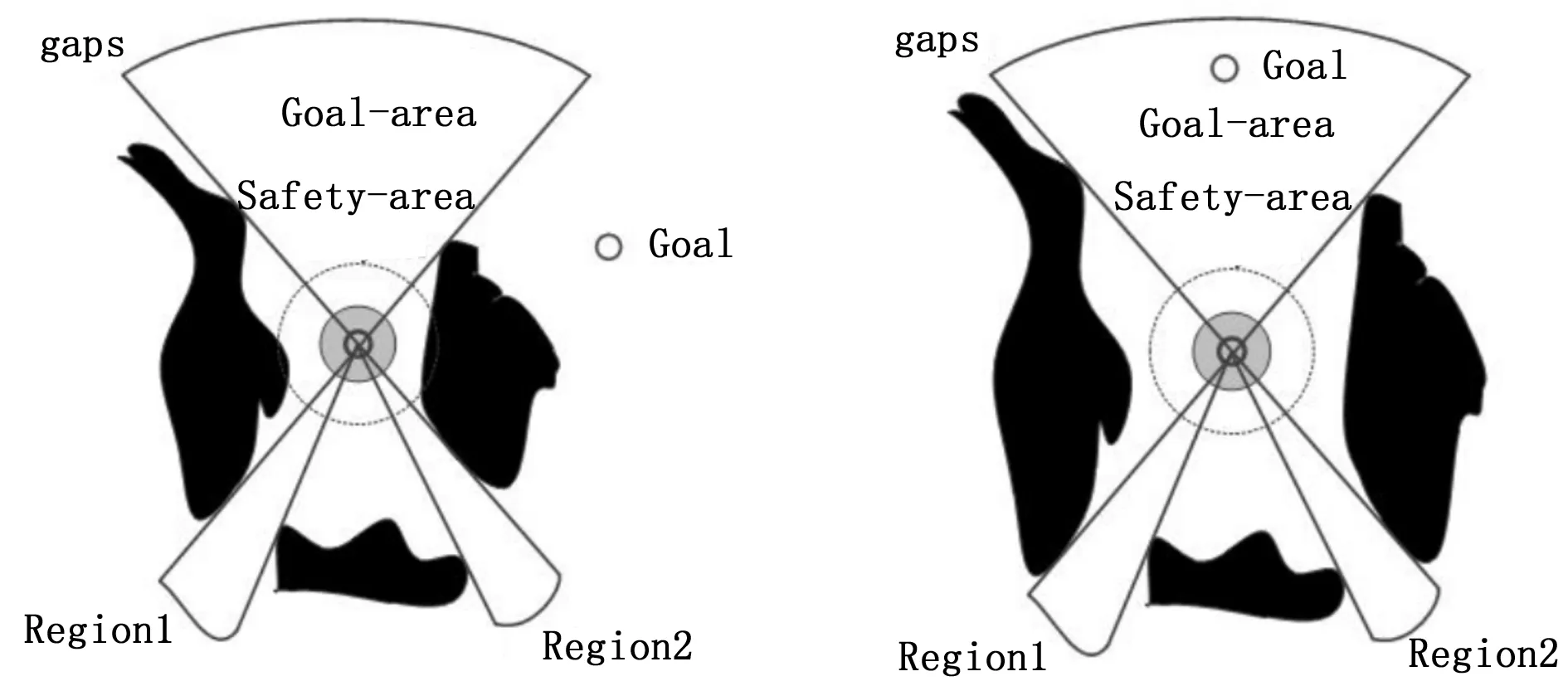
图3 LSNG2情景示意图 图4 GG情景示意图
4)HSWA(High-safety Wide angel):根据规则1、3和4,情景HSWA表示机器人的目标点不在目标区域,机器人处于高安全系数,且目标区域为宽角度,如图5所示。
5)HSNA(High-safety Narrow angel):根据规则1、3和4,情景HSNA表示机器人的目标点不在目标区域,机器人处于高安全系数,且目标区域为窄角度,如图6所示。
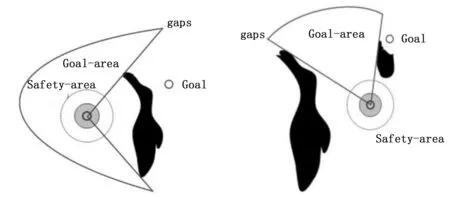
图5 HSWA情景示意图 图6 HSNA情景示意图
3 仿真实验
如图7所示,机器人运行环境中存在10个大小形状不同障碍物,圆形代表目标点,方块代表机器人,其余形状代表障碍物。

图7 复杂动态环境机器人避障仿真图
图7(a)表示t=8.7 s时,机器人获得其速度与方向信息,开始路径规划,向目标点运动;图7(b)表示t=16.8 s时,机器人避开静态障碍物,同时检测到动态障碍物C1;图7(c)表示t=20.9 s时,机器人成功绕过动态障碍物C1,在避障过程中机器人会检验总势场是否处于局部最小值点,若是,则使用虚拟水流法处理;图7(d)表示t= 24.5 s时,机器人检测到动态障碍物C2,开始避障,同样检测总势场是否处于局部最小值点;图7(e)表示t=30.1 s时,机器人成功避开动态障碍物C2,直向目标点行进;图7(f)表示t=40.8 s时机器人安全到达目标点。
4 机器人路径规划实验
实验环境如图8(a)所示,纯净水桶A、板凳B、C表示静止障碍物,动态障碍物D与目标点E的距离较近。图8(a)中行人代表一个动态障碍物D,平均速度为,在目标点和障碍物之间来回走动。IN-RE轮式移动机器人移动速度为,目标点E距离机器人7 m,为确保安全,设置安全距离为0.4 m,其他参数设置等同仿真实验参数设定。
图8(a)表示IN-RE移动机器人的工作运行环境,开始向目标点运动;图8(b)表示t=6.7 s,机器人行驶6.7 s后,检测障碍物B、C,机器人开始转弯避开静态障碍物;图8(c)表示t=8.1 s时,机器人向左转弯后又检测到静态障碍物A;图8(d)表示t=10.4 s时,机器人检测到静态障碍物A后,机器人倒退以确保其能向右转弯;图8(e)表示t=14.5 s时,机器人向右转弯,开始避开障碍物B、C;图8(f)表示在t=19.7 s时,机器人成功避开静态障碍物B、C,直向目标点行进;图8(g)表示t=25.4 s时IN-RE移动机器人检测到动态障碍物D,开始向右转弯(因为动态障碍物向左行走);图8(h)表示t=33.7 s时,机器人成功避开动态障碍物D;图8(i)表示t=35.8 s时,机器人调整好运动方向,向目标点E行进;图8(j)表示t=38.9 s,机器人最终安全无碰撞到达目标点E,验证了提出的动态人工势场法的可行性,比例尺为1:47。
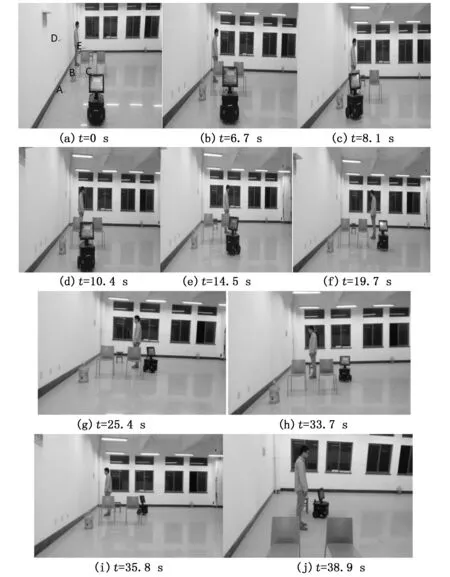
图8 动态环境下IN-RE自动避障实验
5 结论
本文深入分析动态人工势场算法原理,考虑无人汽车与目标点的相对位置以及相对速度因素构造引力势场和引力函数,考虑无人汽车与障碍物之间的相对位置、相对速度以及相对加速度因素构造斥力势场和斥力函数。通过仿真和现场实验,实验结果表明应用改进人工势场算法的机器人避开了距离目标点较近的障碍物,顺利到达目标点,验证了改进算法的可行性。
[1] 蔡自兴. 无人驾驶汽车学基础[M]. 北京:机械工业出版社, 2009.
[2] 耿以才,黄立新,陈凌珊,等. 无人船安全目标追踪与自动避障算法[J]. 计算机测量与控制, 2015, 23(7): 2467-2469.
[3] Bimbo A D, Pernici F.Distant targets identification as an on-line dynamic vehicle routing problem using an active-zooming camera[A]. Proc 2nd Joint IEEE International Workshop on VS-PETS[C]. Beijing,2005:97-104.
[4] 朱庆宝. 动态复杂环境机器人路径规划蚂蚁预测算法[J]. 计算机学报, 2005, 28(6): 1895-1906.
[5] 李奕铭. 基于人工势场法的移动机器人避障研究[D]. 合肥: 合肥工业大学, 2013. 15-18.
[6] 顾 民, 葛良全. 基于扇形扫描的机器人避障算法[J]. 微计算机信息, 2007, 32(20): 212-214.
[7] 刘传领, 梁咏梅, 杨静宇. 复杂环境下解决势场法局部最小问题的路径规划方法[J]. 哈尔滨理工大学, 2012, 17(4): 78-83.
[8] 陈少斌. 自主移动机器人路径规划及轨迹跟踪的研究[D]. 杭州:浙江大学, 2008.
Robot Path Planning Based on Dynamic Potential Field Method
Huang Lixin, Geng Yicai
(Robotics Laboratory, Shanghai University of Engineering Science, Shanghai 201620,China)
Considering relative position and relative velocity between target point and robot, gravitational potential field and gravitational function were established. Considering the relative position, relative velocity and relative acceleration factor between robot and obstacles, repulsive potential field and repulsion function were established. Based on the “divide and rule” strategy, the running environment of robot was decomposed into different scenarios. According to the environmental information obtained by sensors, current scene of robot was judged and corresponding action was selected according to current scene and predefined scenario - motion rule. The results show that IN-RE robot could avoid the dynamic obstacles and reach the target point successfully. What’s more, results also verify that the improved artificial potential field method is applied to the dynamic environment.
dynamic potential field method; robot;path planning; automatic obstacle avoidance
2016-09-01;
2016-09-29。
黄立新(1963-),女,江苏海门市人,工学博士,教授,主要从事机械工程、机器人技术等方向的研究。
1671-4598(2017)02-0164-03
10.16526/j.cnki.11-4762/tp.2017.02.045
TP242.2
A
