连杆自锁式花生拔采机的设计与有限元分析
2017-03-16黎毓鹏许海浪
李 竞,毕 伟,芦 迪,黎毓鹏,许海浪
(广西大学 机械工程学院,南宁 530004 )
连杆自锁式花生拔采机的设计与有限元分析
李 竞,毕 伟,芦 迪,黎毓鹏,许海浪
(广西大学 机械工程学院,南宁 530004 )
设计了一种连杆自锁式花生拔采机,可实现花生机械化拔起采摘的功能。通过对个体农户人工采摘花生现状的分析,给出了花生拔起动作和采摘工艺流程,设计出一种适合大面积花生拔起采摘机,利用UG建立三维模型导入ADAMS和MATLAB进行仿真,并利用ANAYS进行有限元分析,最后进行研制。该拔起采摘机可以高效完成花生拔起采摘动作,关键部件满足强度和刚度要求,并能适应花生在播种过程中存在的直线误差问题,实现了多自由度的拔采,对提高大面积花生采摘效率、减少劳动强度具有重要意义。
花生拔采机;连杆自锁式;有限元分析;ANAYS
0 引言
花生是一种具有良好食用价值、药物价值及食疗价值的农作物,需求量极大。当前的拔采工作在个体农村户中都是以人工的方式进行,其工作量和劳动强度都是十分巨大,且单人的劳动效率不高。由于工作条件与工作强度的双重问题,农民极易发生各种不适的反映,甚至因此烙下病根。为解决上述问题,本文提出一种连杆自锁花生拔采机。为使该机结构合理、轻巧牢固、操作方便,需引进更加合理、先进的设计方法。因此,利用UG建立三维模型,将模型导入基于虚拟样机技术平台上进行仿真与分析,在未真正生产出真实的物理样机之前就对其进行仿真模拟,提前知道产品的各种性能,并利用ANAYS对重要零件进行刚度和强度分析,验证其是否满足工作要求,防止各种设计缺陷的存在,对系统的结构进行优化,以改善其工作性能,并提高其可靠性。最后,进行了机器的研制和试地试验,结果表明:连杆自锁花生拔采机可以高效地完成花生簇拔起采集动作,能适应花生在播种过程中存在的直线误差问题,实现了多自由度的拔采,对提高大面积花生采摘效率、减少劳动强度具有重要意义。
1 工作原理和结构设计
1.1 连杆自锁式花生拔采机的工作原理
花生拔采机为半机械化机械,其主要动力是来自于人力。该机械在田地的行走机构靠人力推动,到达一簇花生的位置后操纵手杆,四连杆带动剪叉机构使得夹具收拢,最终夹紧花生簇。为了提高可提供的拔采的摩擦力和拔采过程中出现因花生杆变形过大断裂的现象,在夹具的前端与花生杆直接接触的地方套有橡胶套。在夹具夹紧花生杆后,用过压旋转手杆式的夹具绕着支撑板的中心向上旋转,以实现花生的拔采动作。在花生种植的过程中,由于是人工种植,单行花生簇的所在位置不在一条直线上,相似于波浪线,为增加花生拔采机的适应性,可通过在水平方向旋转手杆实现夹具在水平方向有一定的摆动范围。为适应使用者的自身高度,可以松开固定螺钉调节旋转手杆与调节螺杆的相对位置,以实现花生拔采机的高度可调性,增加对使用者的适应性。
1.2 杆自锁式花生拔采机主要机构设计
连杆自锁式花生拔采机包括行走机构、夹持机构及连杆自锁机构,利用UG建立三维模型,如图1所示。
2 连杆自锁式花生拔采机的运动学分析
2.1 花生力学性能分析
在花生采摘的过程中,拔采机通过夹紧花生簇的茎部将花生簇拔起,花生簇在被夹紧和拔起的过程中主要受到剪切力和拉伸力的作用。此过程采摘的成功率和花生损坏率一直是收获的主要问题,剪切力和拉伸力对采摘成功率和花生损坏率产生直接影响。对花生茎、根进行力学性能的试验和分析,可为夹持机构对夹紧花生的夹紧力和拉伸力的确定提供理论依据。
花生力学性能主要体现在组织含量和纤维含量,茎纤维致密可以更好承受拉伸力和剪切力。花生茎稀疏的部位在拔起过程中容易被折断,容易造成较大的收获损失。为此,利用深圳鑫三硅检测有限公司制造的万能试验机(模型:ctm-4503;规格:5 kN;精度等级:0.5级)对花生茎节点的位置的拉伸阻力和剪切力进行测试,部分结果如表1所示。
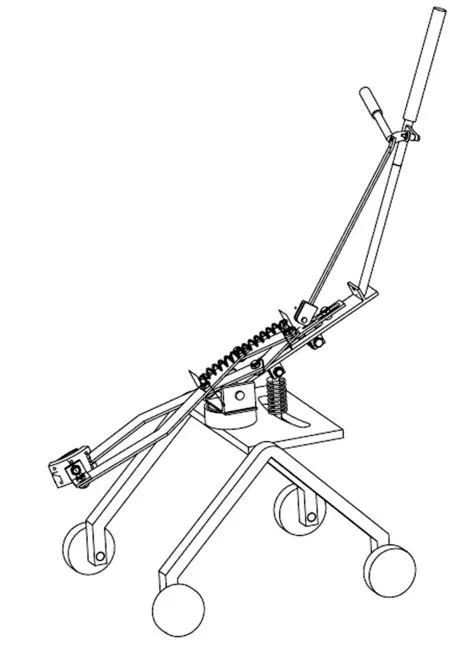
图1 整体结构示意图Fig.1 Physical picture表1 花生茎的拉伸应力和剪切力的部分试验结果
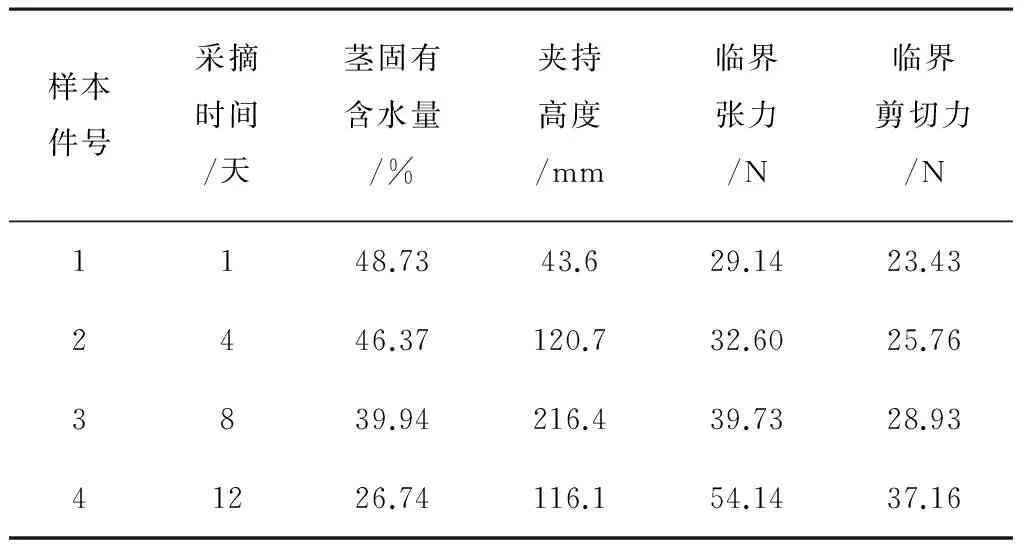
样本件号采摘时间/天茎固有含水量/%夹持高度/mm临界张力/N临界剪切力/N1148.7343.629.1423.432446.37120.732.6025.763839.94216.439.7328.9341226.74116.154.1437.16
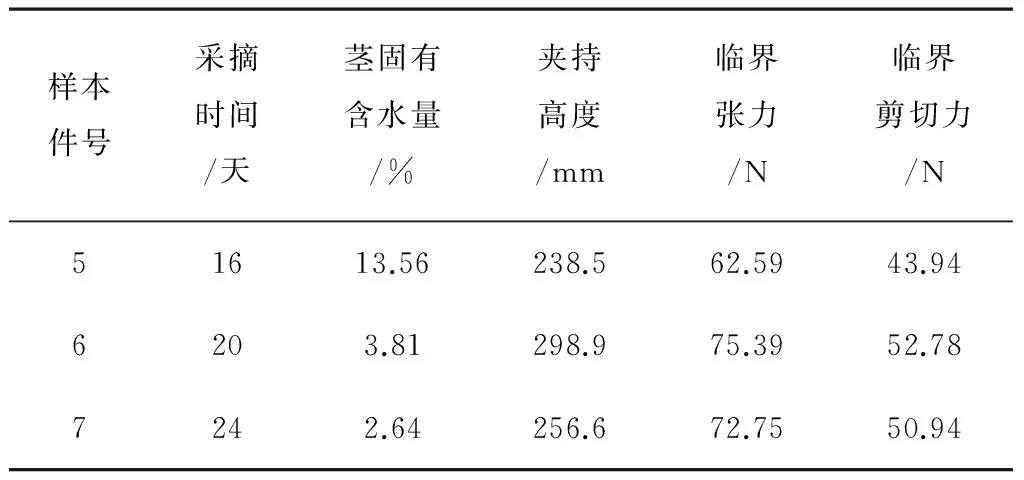
续表1
利用MatLab拟合工具箱,拟合出最大拉伸力Ft与时间t的关系为
Ft=-0.0706t2+3.1469t+19.157
(R2=0.8415,Sig.=0.015478)
最大剪切力Fs与时间t的关系为
Fs=-0.0614t2+2.8461t+31.158
(R2=0.8724,Sig.=0.01749)
假设花生在最佳收获期被采摘,此时花生的固有含水量较高,茎节点和根节点的抗拉和抗剪性能达到最高,根据花生茎的力学模型得
Fmax=[σ]·S(S=πd2/4)
2.2 连杆自锁式花生拔采机夹持机构运动学分析
将三维模型导入ADAMS中进行加持机构进行动力学仿真,得到夹持机构左右夹具4个极点A、B、C、D的位移曲线。将仿真结果导出MatLab中,得到总体运动轨迹:一是单次夹具有效夹紧范围;二是夹具夹紧位置在水平方向的旋转范围。
2.2.1 连杆自锁式花生拔采机单次有效范围分析
将夹紧过程仿真数据导入MatLab 进行分析,可得到夹具有效范围图如图2所示。
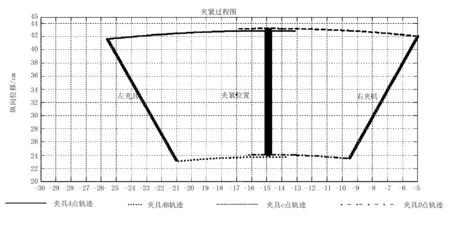
图2 花生拔采机单次夹具有效范围图Fig.2 Peanut mining machine single fixture range diagram
如图2可知:其封闭曲线的所围成的封闭图形即为花生拔采机的单次夹具有效范围,有效范围面积约为312mm2。这说明,其范围相对一簇花生所占面积大得多,是可行的。
2.2.2 连杆自锁式花生拔采机的水平旋转范围分析
将两个极限位置仿真数据导入MatLab 进行分析,得到该机械工作部分在水平面上的旋转范围图如图3所示。
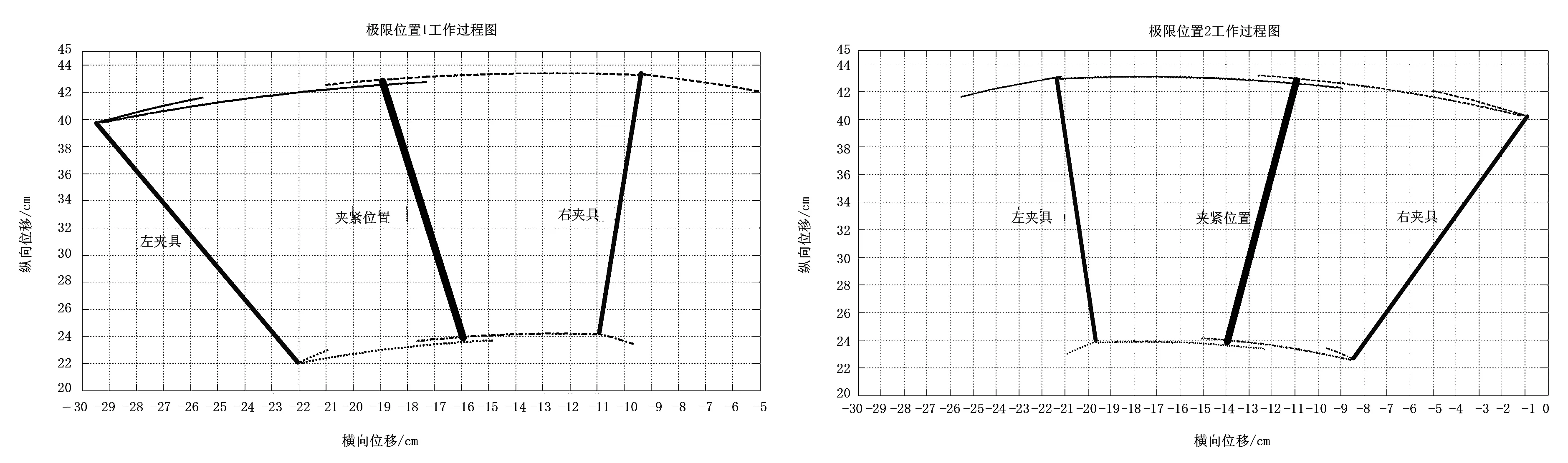
图3 花生拔采机极限位置图Fig.3 Peanut mining machine limit position diagram
由图3可知:花生拔采机工作部分可使得夹紧位置左右旋转9.5°,则其水平旋转范围为19°,对于因种植过程中导致的花生簇不再同一直线上的误差有足够的适应度。
3 连杆自锁式花生拔采机的有限元分析
3.1 导入三维模型和建立材料属性
将用UG建立的三维模型导入有限元分析软件Ansys Workbench16.2中,设定材料为45钢,其弹性模量为2.1e11MPa,泊松比为0.3,通过Workbench的Engineering Data模块进行材料属性编辑。
3.2 划分网格和设置连接
首先通过size功能定义网格尺寸,采用六面体和四面体两种方法分别对不同的部件进行划分,最终的有限元网格模型如图4所示。其网格总数为87 626,节点总数为427 258。对整个机构添加完整的零件接触约束,包活滑动副、转动副以及固定副。模型如图4所示。
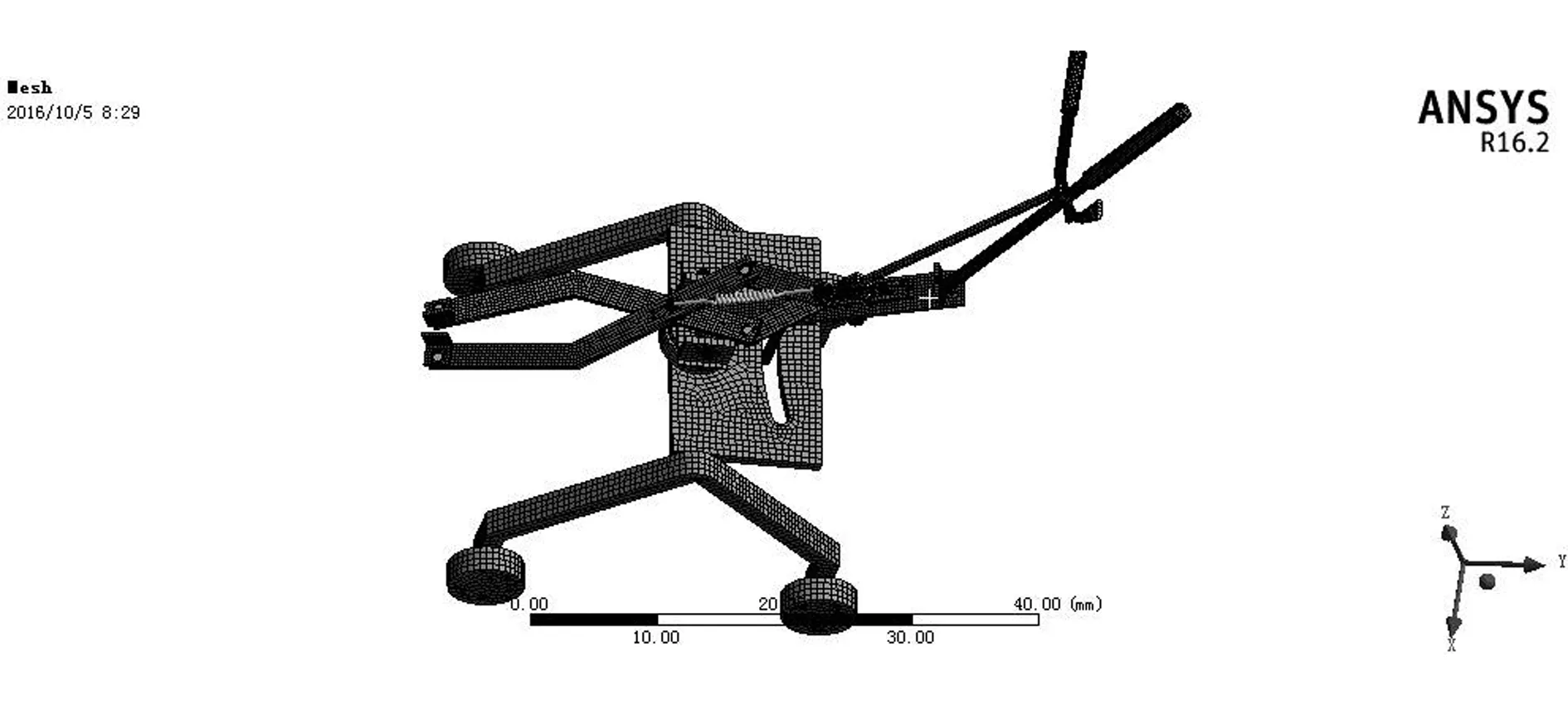
图4 花生拔采机有限元模型Fig.4 Peanut mining machine finite element model
3.3 施加载荷
拔采机加载花生茎节点上的作用力为夹持力及拉力,因此花生茎节点对花生拔采机的反作用力为:在拔起过程中,花生对机器竖直向下的反作用力经试验计算为64.76N;另一种是机器夹紧花生茎节点时所受花生的反作用为45.25N。
3.4 有限元计算结果分析
经有限元计算,最终的结果如图5所示。
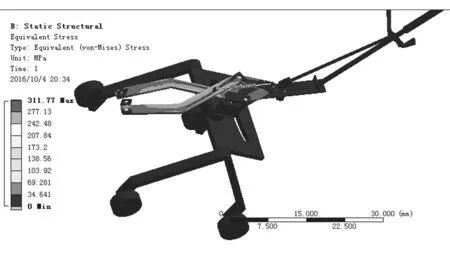
图5 花生拔采机等效应力云图Fig.5 Equivalent stress cloud of peanut mining machine
3.4.1 夹持机构有限元结果分析
夹持机构的等效应力云图和应变云图如图6所示。经有限元计算,夹持机构的最大应力为311.77MPa,小于45钢的屈服强度385MPa;最大应变为0.001 75mm/mm,小于许用应变。因此,夹持机构满足刚度和强度要求。
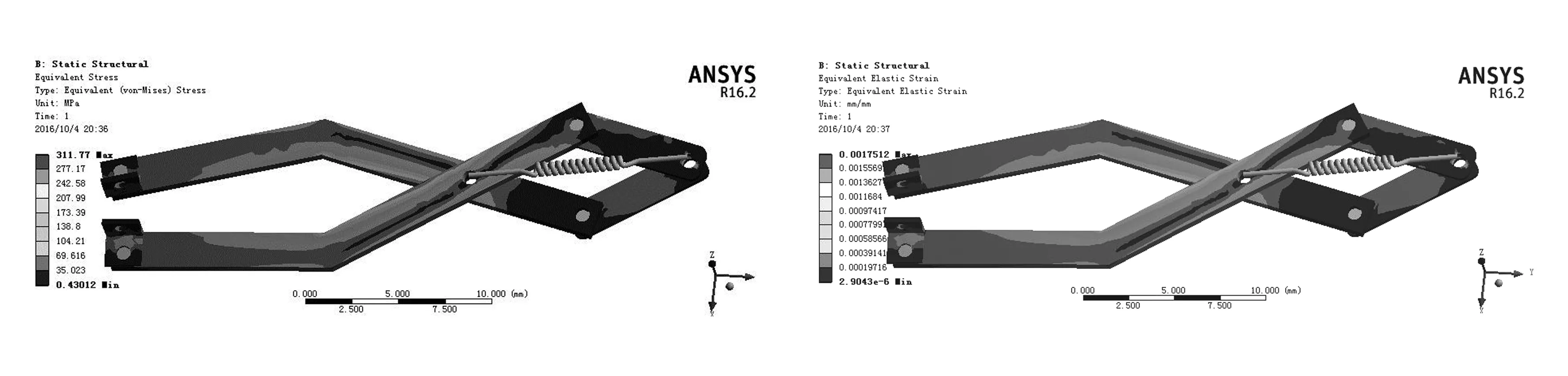
图6 夹持机构等效应力和应变云图Fig.6 Equivalent stress and deformation cloud of clamping mechanism
3.4.2 连杆自锁机构有限元结果分析
连杆自锁机构的等效应力云图和应变云图如图7所示。

图7 连杆自锁机构等效应力和应变云图Fig.7 Equivalent stress and deformation cloud of rod self-locking mechanism
经有限元计算,连杆自锁机构的最大应力为198.4MPa,小于45钢的屈服强度385MPa;最大应变为0.000 995mm/mm,小于许用应变。因此,连杆自锁机构满足刚度和强度要求。
4 连杆自锁式花生拔采机的研制和实际测试
4.1 连杆自锁式花生拔采机的研制
通过分析可知,花生拔采机具有良好的工作可靠性及良好的适应性,可运用仿真过程中个零件尺寸进行试制与实验。花生拔采机实物拍摄图8所示。

图8 花生拔采机实物拍摄图Fig.8 Peanut mining machine photo graph
4.2 试验
4.2.1 试验对象及条件
选用南宁市宏利花生种植农民专业合作社种植的花生,品种为粤选58号,土壤类型为沙壤土,种植形式为平作,行距为300mm,株距平均为180mm,平均株高为380mm,结果深度为50~120mm。
4.2.2 试验指标
试验指标包括生产率、花生秧含土率、果实损失率、收获宽幅,根据《中华人民共和国农业行业标准—花生收获机作业质量》(NY/7502-2002)进行测定。
1)生产率的测定。测出拔采机收获花生果的质量,按照E=W/T进行计算 。其中,E为生产率;W为采集的果实重量;T为纯工作时间。
2)花生秧含土率。测定收获花生秧的质量和花生秧上土壤的质量,按照H=Mt/M进行计算。其中,Mt为所含土壤的质量,M为花生秧的质量。
3)果实损失率。测定收获花生果实的总质量和破损花生果实的质量,按照S=Ms/M进行计算。其中,MS为破损花生果实的质量;M为收获花生果实的总质量。
4.2.3 结果与分析
花生拔采机的试验结果如表2所示。由性能考核技术参数可知:该拔采机作业性能较好,生产率为102kg/h,花生秧含土率为14.8%,果实损失率为3.6%,均优于行业标准 NY/7502-2002,满足生产要求。
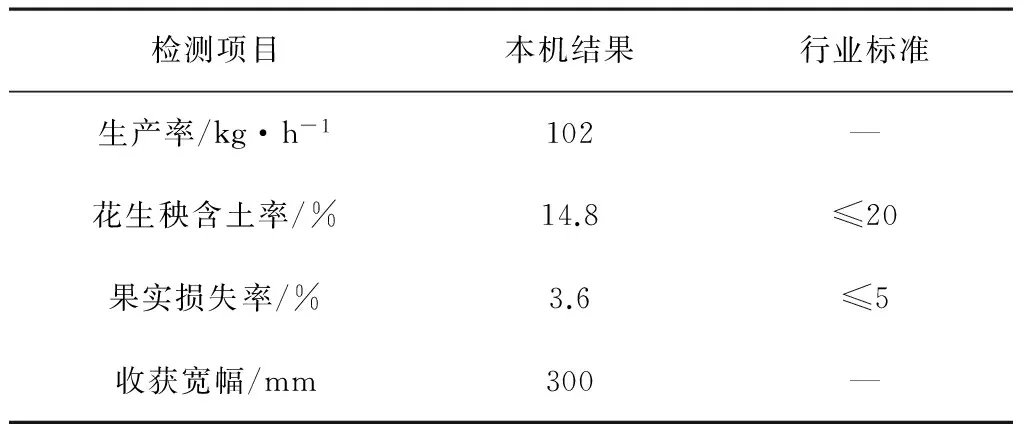
表2 性能考核技术参数
5 结论
通过仿真、有限元结果分析及试验可知:花生拔采机关键部件满足强度和刚度要求,具有良好的工作可靠性和良好的适应性;实际的工作效率较高,技术参数均优于行业标准;在满足农民个体户生产效率的同时减少劳动力和劳动强度,可实现花生拔采工作的半人力半机械化的目标。
[1] 丁保江,唐殿明,付华良,等.小型背负式花生联合收获机的设计研究[J].农业装备与车辆工程,2005(11):33-35.
[2] 黄煜.拔花生[J].学生之友:童花果,2016(3):20-21.
[3] 胜国.介绍几种花生收获机械[J].农业知识,2013(25):25.
[4] 韓更金.燕麦草的收割与处理方法[J]. 中国农垦,1953(9):5-6.
[5] 孙中瑞.花生的收获[J].农业科技通讯,1983(10):19.
[6] 俞种宝.收割机行业热处理工艺问题分析[J].机械工厂设计,1984(3):8-20.
[7] 杨然兵,徐玉凤.花生机械收获中根、茎、果节点的力学试验与分析[J].农业工程学报,2009(9)127-131.
[8] 凌 轩,刘江涛,王旭东.数字化花生摘果测力系统研制[J].农机化研究,2015,37(4):95-98.
Design and Finite Element Analysis of Connecting Rod Self-locking Peanut Mining Machine
Li Jing, Bi Wei, Lu Di, Li Yupeng, Xu Hailang
(College of Mechanical Engineering, Guangxi University, Nanning 530004, China)
Objective Design and research a connecting rod self-locking peanut mining machine to achieve function of pulling up peanut to picking mechanically. Methods Through the analysis on the current status of artificial picking peanut for individual farmers, the technological process of picking and the action of pulling up was analyzed, a peanut mining machine fitting for large area peanut was designed. Using UG to establish a three-dimensional model and using ANAYS to carry out finite element analysis, the machine is tested finally. Results The machine can efficiently complete the picking action of the peanut. Conclusion this machine has good adaptability, implementation of mining multi degree of freedom with a wide range of purposes, realizing the peanut mining work do pull machine. To improve the efficiency of large areas of peanut harvesting, reduce labor intensity is of great significance.
peanut mining machine; connecting rod self-locking; finite element analysis; ANAYS
2016-10-13
广西制造系统与先进制造技术重点实验室项目(15-14030S007);广西大学国家级大学生创新创业训练计划项目(201510593004)
李 竞(1972-),女,广西桂林人,副教授,(E-mail)57284114@qq.com。
黎毓鹏 (1971-),男,广西桂平人,工程师,(E-mail)1535868481@qq.com。
S225.7+3
A
1003-188X(2017)12-0048-05
