带翼振动深松铲运动特性分析及试验研究
2017-03-16韦钟继郑丁科杨丹彤孙芳媛
韦钟继,郑丁科,杨丹彤,孙芳媛
(华南农业大学 南方农业机械与装备关键技术省部共建教育部重点实验室,广州 510642)
带翼振动深松铲运动特性分析及试验研究
韦钟继,郑丁科,杨丹彤,孙芳媛
(华南农业大学 南方农业机械与装备关键技术省部共建教育部重点实验室,广州 510642)
为解决目前深松作业机具在南方大粘性、易板结及压实特别严重的土壤特性下,机具耕作阻力大、深松质量不高的问题,对带翼振动深松铲深松机理进行研究。通过对机具深松部件进行运动仿真,对速度、加速度、运动轨迹进行分析表明:铲翼和铲尖的切削和抬升土壤过程同步交替进行;铲尖水平方向速度和加速度幅值很大,主要切削土壤,铲翼垂直速度和加速度幅值很大,主要抬升土壤;铲翼对土壤进行二次的破碎疏松,以较小的耕作阻力有效提高了土壤疏松质量。田间试验结果表明:振动深松后在10~20cm和20~30cm土层的坚实度降低了54.2%和53.7%,不振动深松10~20cm和20~30cm土层的坚实度降低了41.6%和48.8%;特别是在0~10cm土层振动深松使土壤坚实度比深松前降低了70.1%,远大于不振动深松的42.7%;带翼深松铲振动深松相比不振动深松可以减少3.2%~27.2%的牵引力阻力,减阻效果明显。由此可为带翼深松铲结构优化和提高深松机具在南方的作业性能提供理论参考。
深松铲;铲翼;振动;减阻
0 引言
长期传统浅层耕作、单一施用化肥、轮式机具的反复碾压及南方丰富降雨使土壤自然沉降,水土流失造成耕层浅和土壤板结严重。研究表明,深松整地能提高土壤蓄水保墒能力[1]、打破板结土壤、降低土壤硬度[2],促进了作物根系生产,从而提高产量[3-4]。2016年2月,农业部办公厅印发的《全国农机深松整地作业实施规划(2016-2020)》中提出加强各级财政支持,落实农机深松整地作业补助,积极研发生产先进适用、安全可靠的深松整地机械。由于深松阻力大,能耗是作物种植或收获机具能耗的3~5倍[5-7],因此深松减阻是推广深松技术的关键问题之一。
国内外专家学者对深松减阻技术进行了大量研究,主要有仿生减阻和振动减阻。仿生减阻主要对仿生铲、可调翼铲、符合形态铲等松土部件进行研究[8-11]。针对自激振动[12-13],系统地研究了“拖拉机—深松机—土壤”系统的动态特性,指出工作部件切土、破碎和提升过程是同时进行的,振动能有效减小耕作阻力。对于强迫振动大量研究[14-16]发现振动对牵引阻力和功率消耗的影响,土壤剪切力的波动主要是振动过程中垂直方向上的加速度引起的。辛丽丽等[15]根据深松铲对土壤的切削、提升、再切削,建立考虑分段土壤作用力的振动深松机—土壤系统的力学模型,采用渐近法与数值积分求解分析该模型。
本文针对南方旱地耕作土壤板结、坚实度高及耕作阻力大的问题,采用运动仿真技术,对带翼深松铲振动松土和振动减阻机理进行研究,了解其深松过程的运动特性,并进行田间试验,为进一步优化带翼铲机械结构、作业参数及提高整机性能提供理论依据。
1 振动深松机的结构与技术参数
1.1 整机结构及其工作原理
本试验使用的受迫式振动深松机主要由机架、变速箱、振动偏心轴连杆式机构、偏心振动传递杆、带翼振动深松部件、限深轮及切割圆盘刀等组成,如图1所示。机架通过三点悬挂装置与拖拉机挂接,振动深松机的变速箱通过万向传动轴与拖拉机的动力输出轴连接输入动力。变速箱的输出端为偏心轴,与振动偏心连杆机构连接,做往复运动,将相应动力传递给偏心振动传递杆,带动深松铲产生振动。该机具主要技术参数:外形尺寸1 500mm×2 520mm×1 400mm;配套动力44.1~58.8kW;偏心距13.5mm;松土深度250~450mm;作业宽度2 000mm;作业效率0.4~0.6hm2/h;深松铲数量4个;振动频率500~650次/min。
1.2 带翼深松铲的结构参数
振动深松铲主要由铲柄、铲翼、铲尖等组成, 结构如图2所示。振动深松铲结构参数主要包括深松铲总高度h1、铲翼安装高度h2、铲柄长度b1、铲翼宽度b2、深松铲长度b3、铲尖宽度b4、铲尖长度n、振动深松铲入土角γ、铲柄后角λ、铲翼入土角α及铲翼刃倾角ψ。入土角指振动深松铲铲尖或铲翼触土处与土壤水平面的夹角,对耕作阻力和入土性能有很大影响。入土角越小,耕作阻力也就越小,但入土角过小会影响入土性能。碎土角是指铲翼面与土壤水平面的夹角,其作用是松碎土壤,碎土角越大碎土能力越强,耕作阻力也越大,碎土角过大时会使土层发生错乱引起跑墒。铲翼刃倾角ψ为铲翼刃与铲翼前后触土面的夹角,主要影响铲翼刃的锋利和铲翼强度[16]。深松铲铲翼安装高度h2是指铲翼到铲尖的距离,决定了铲翼在耕作是的入土深度。铲翼宽度b2是指两个铲翼的翼尖水平距离,影响深松铲的松土范围。
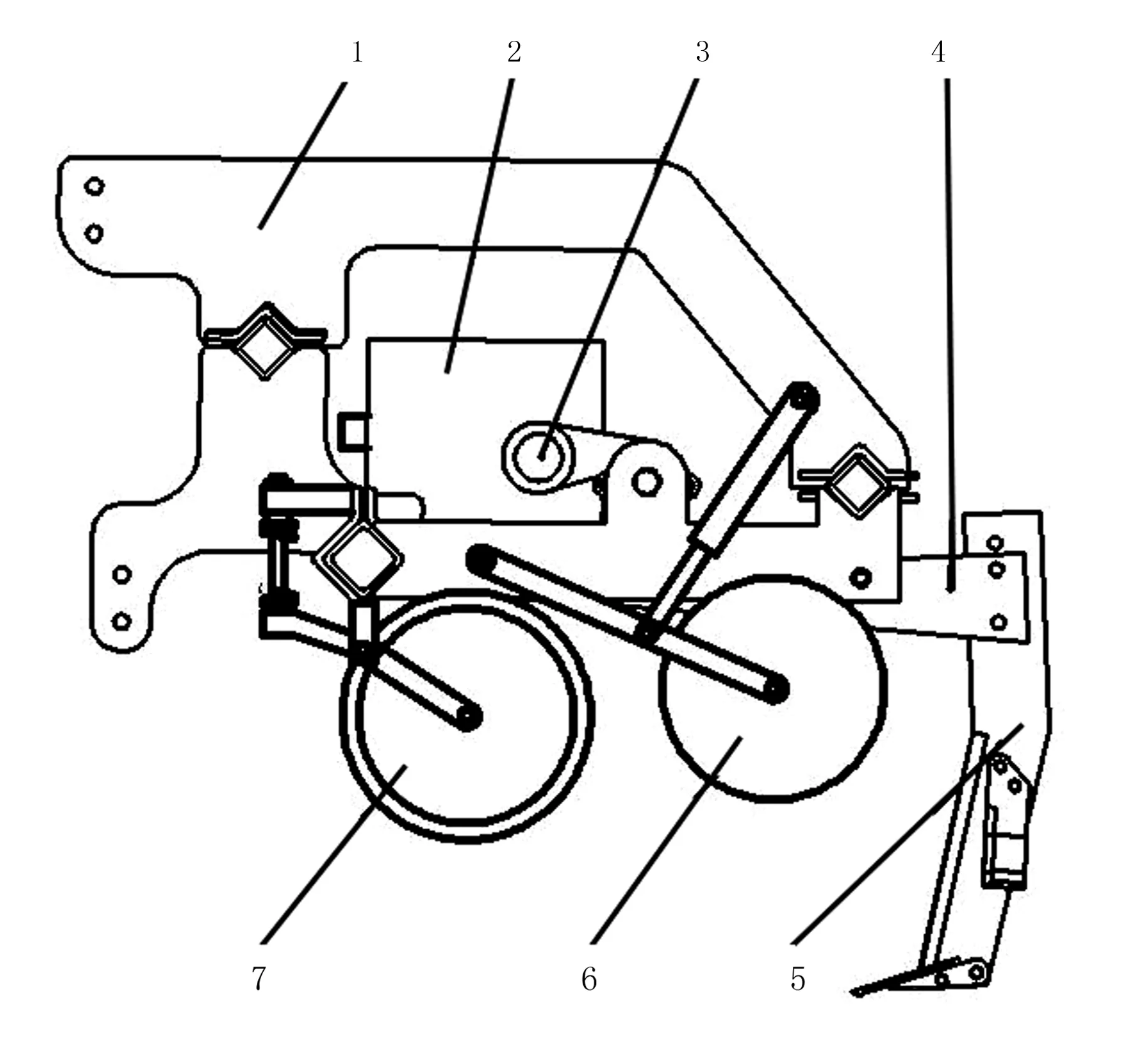
1.机架 2.变速箱 3.振动偏心轴连杆式机构 4.偏心振动传递杆 5.带翼深松部件 6.限深轮 7.切割圆盘刀图1 1ZTS-200振动深松机结构简图Fig.1 Structure of 1ZTS-200 vibrating subsoiler
2 带翼振动深松铲运动特性分析
影响带翼振动深松机耕作阻力、松土性能及功率消耗的主要参数有机具前进速度、振动频率、振动角度和振动幅值,可以用数学方法描述他们之间的关系,分析速度和加速度特性,如图3所示。
2.1 运动特性模型
使用正弦和余弦函数来描述带翼振动深松铲的位移、振动速度和振幅之间的关系。振动深松铲的位移分解为水平方向和竖直方向两个分量。当前进速度为零、振动角β=0°(即振动深松铲铲尖位于原点O正下方)时,则
Sx(t)=Rsinβ′
(1)
Sy(t)=-Rcosβ′
(2)
其中,β′=β+ε′,ε′=εsinωt。
当振动深松机以速度V0作业前进、振动角β≠0时,方程(1)、(2)变为
Sx(t)=V0+Rsinβ′
(3)
Sy(t)=-Rcosβ′
4)
把上述位移方程对时间t求导数,得出速度的方程为
Vx=V0+Rωεcosβ′cosωt
(5)
Vy=Rωεsinβ′cosωt
(6)
把上述速度方程对时间t求导数,得出加速度的方程为
ax=-Rω2ε2sinβ′cos2ωt-Rω2εcosβ′sinωt
(7)
ay=Rω2ε2cosβ′cos2ωt-Rω2εsinβ′sinωt
(8)
其中,Sx(t)和Sy(t)分别为深松铲的水平位移和竖直位移(m);Vx和Vy分别为深松铲的水平速度分量和竖直速度分量(m/s);ax和ay分别为深松铲的水平方向加速度和竖直方向加速度(m/s2);V0为机具在拖拉机牵引下的前进速度(m/s);ω为偏心轴转动的角速度(rad/s);ε为偏心振动传递杆的摆动角(°);ε′为偏心振动传递杆的瞬时摆动角(°);R为摆动半径(mm)。
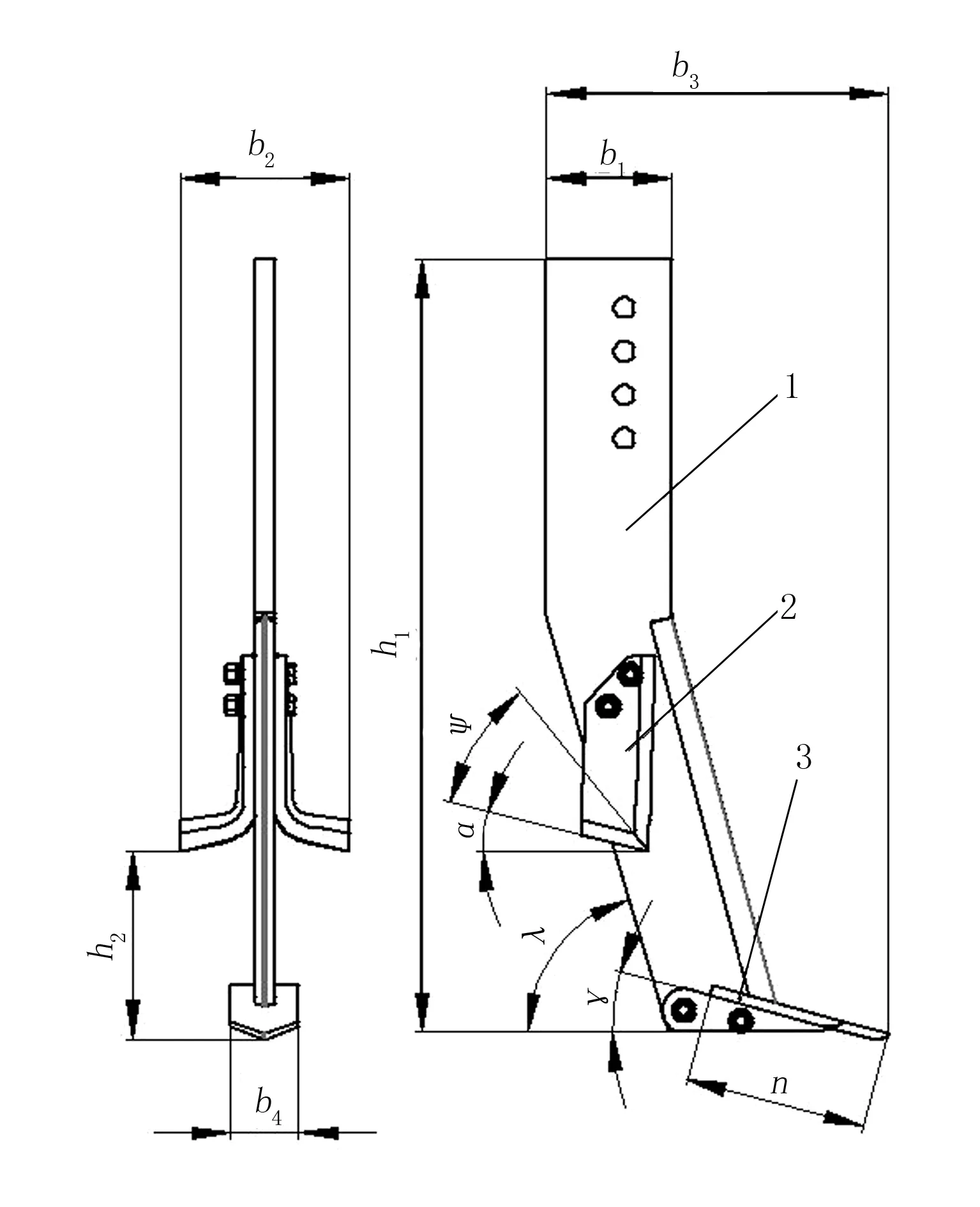
1.铲柄 2.振动深松铲铲翼 3.铲尖图2 振动深松铲结构与参数示意图Fig.2 Vibration subsoiler schematic structure and parameters
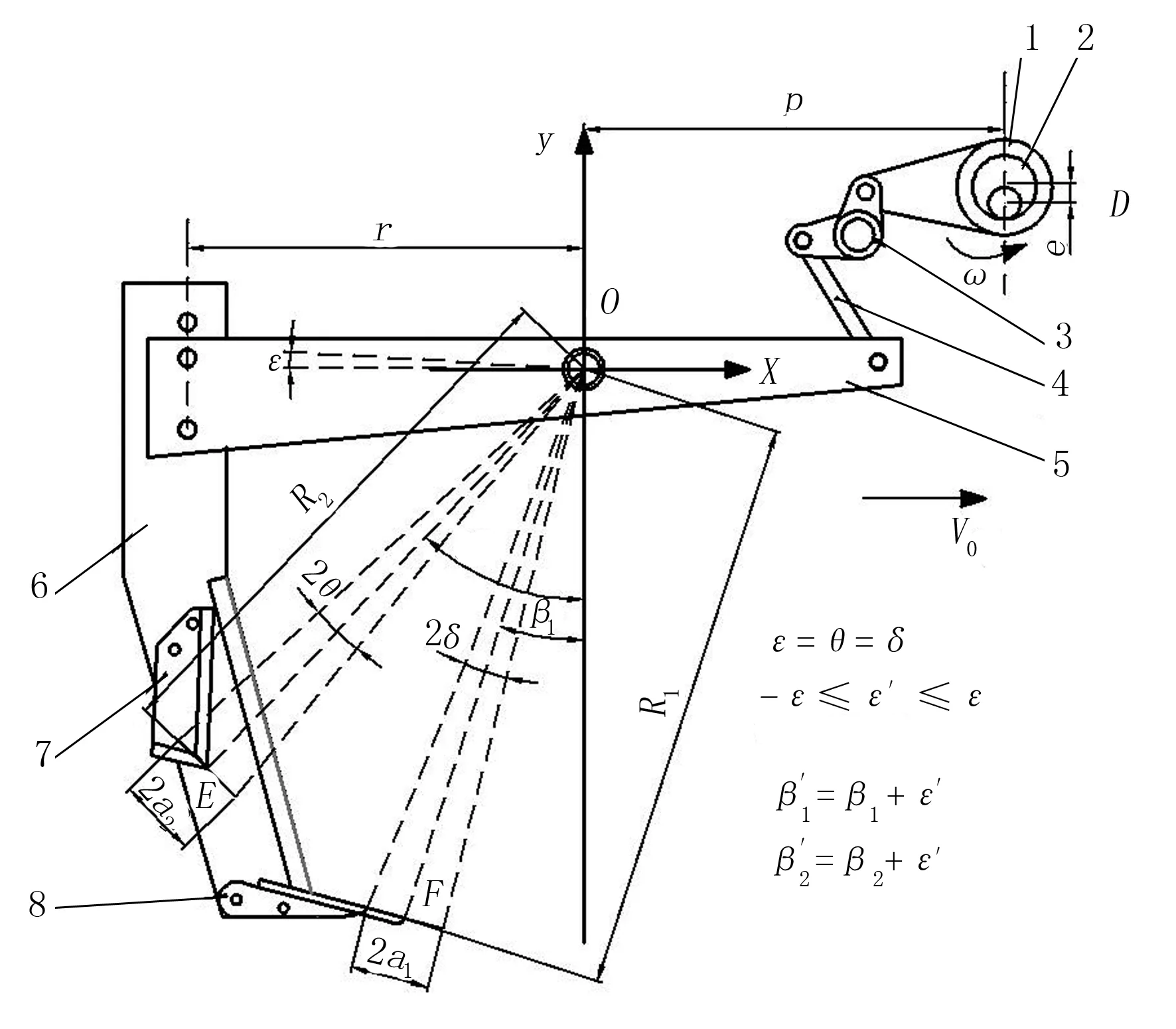
1.偏心轴连接套 2.振动发生偏心轴 3.振动摆柄 4.连杆 5.振动传递杆 6.铲柄 7.铲翼 8.铲尖图3 带翼振动深松铲运动分析Fig.3 Winged vibration subsoiler motion analysis
2.2 仿真分析
把铲尖F点和铲翼E点的摆动半径R1和R2、振动角β1和β2带入上述位移、速度、加速度方程,设定初始值,运用运动仿真软件进行运算仿真分析,求出运动轨迹、速度和加速度曲线。
设定拖拉机牵引振动深松机以速度V0=0.8m/s沿x轴正向前进,偏心轴的振动旋转角速度ω=554r/min,得到铲尖F点和铲翼E点的绝对运动轨迹如图4所示。

图4 绝对运动轨迹Fig.4 Absolute trajectory
图4中,轨迹为波浪形周期变化,铲尖和铲翼的深松过程都可以分为切削土壤和抬升土壤两个阶段:在切削阶段,铲尖和铲翼沿前进方向的斜下方切削土壤,土壤先被压紧然后发生沿剪切面周期性剪切破裂;在抬升阶段,土壤被铲尖和铲翼沿铲面向上掀起,深松铲对土壤的抬升增加了剪切和弯曲破裂,提高对土壤的破碎质量。铲翼是在被铲尖振动剪切疏松过的土壤中运动,进行二次破碎疏松,可以较小的耕作阻力提高土壤的破碎疏松质量。在振动作用下,深松铲的抬升和下降切削运动呈周期性交替进行。
图5和图6分别为铲尖和铲翼的速度、加速度特性。在铲向下切削阶段,开始时两个方向的速度都为零,但加速度值都最大,进行加速运动。
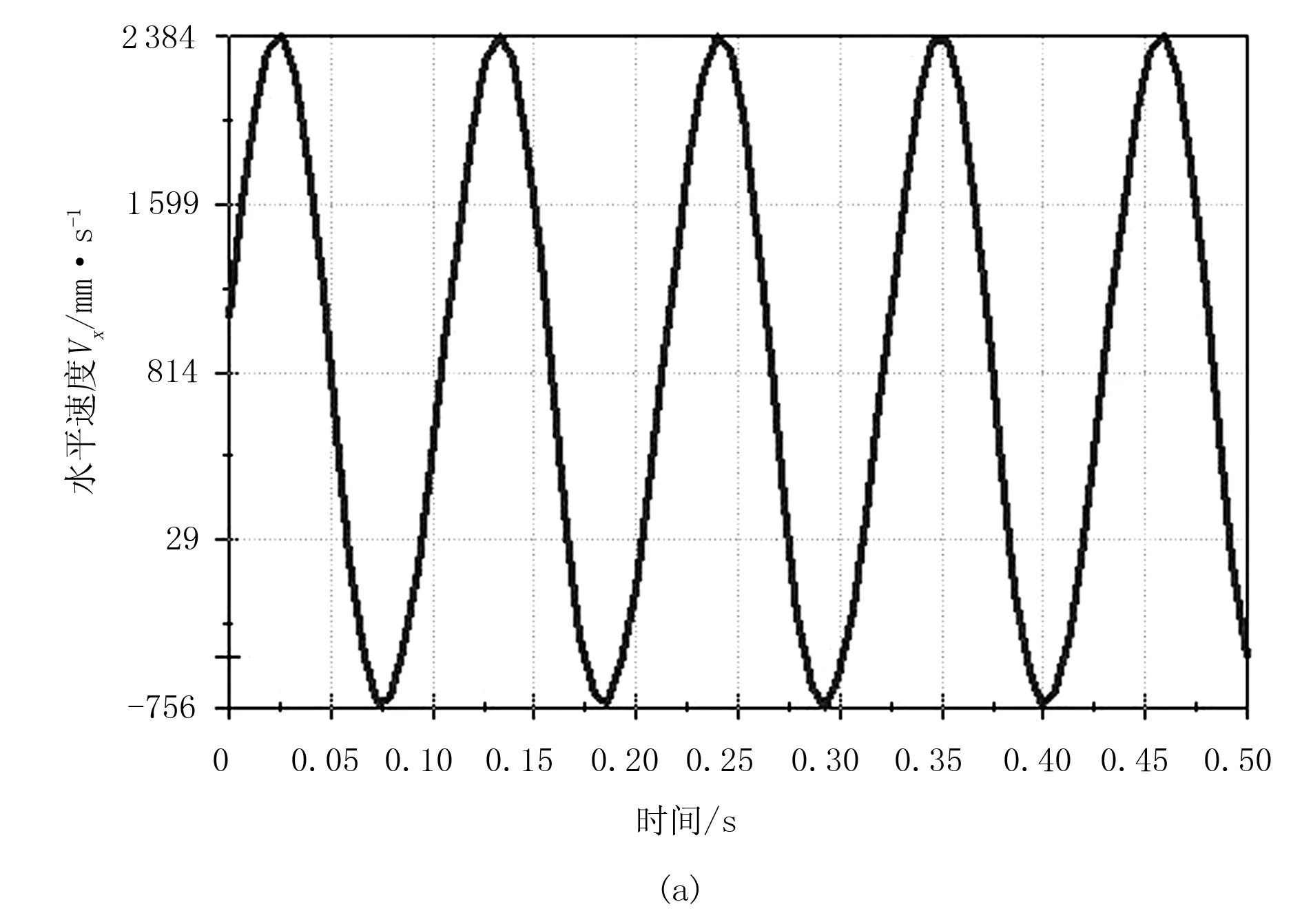
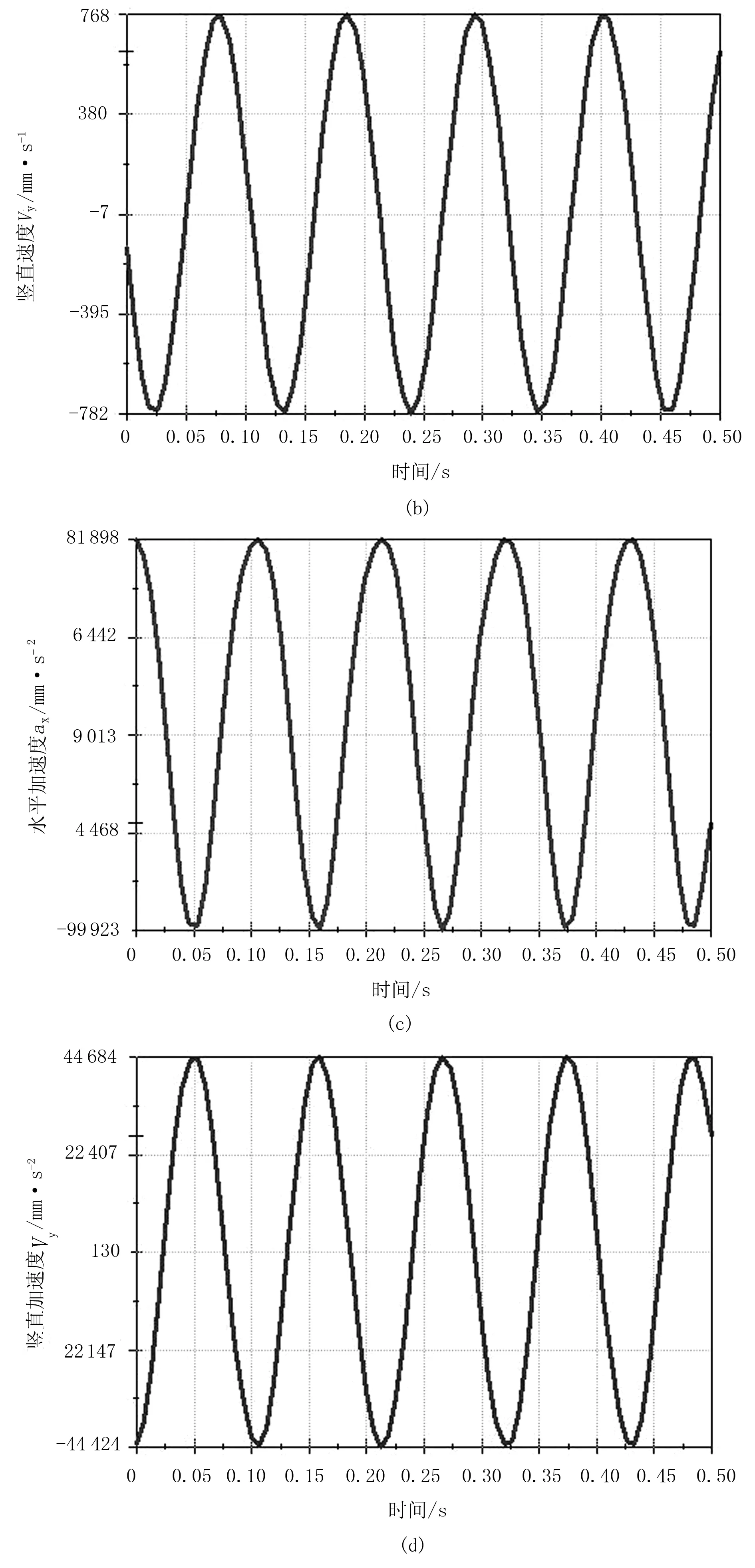
图5 铲尖速度和加速度特性Fig.5 Shovel tip speed and acceleration characteristics
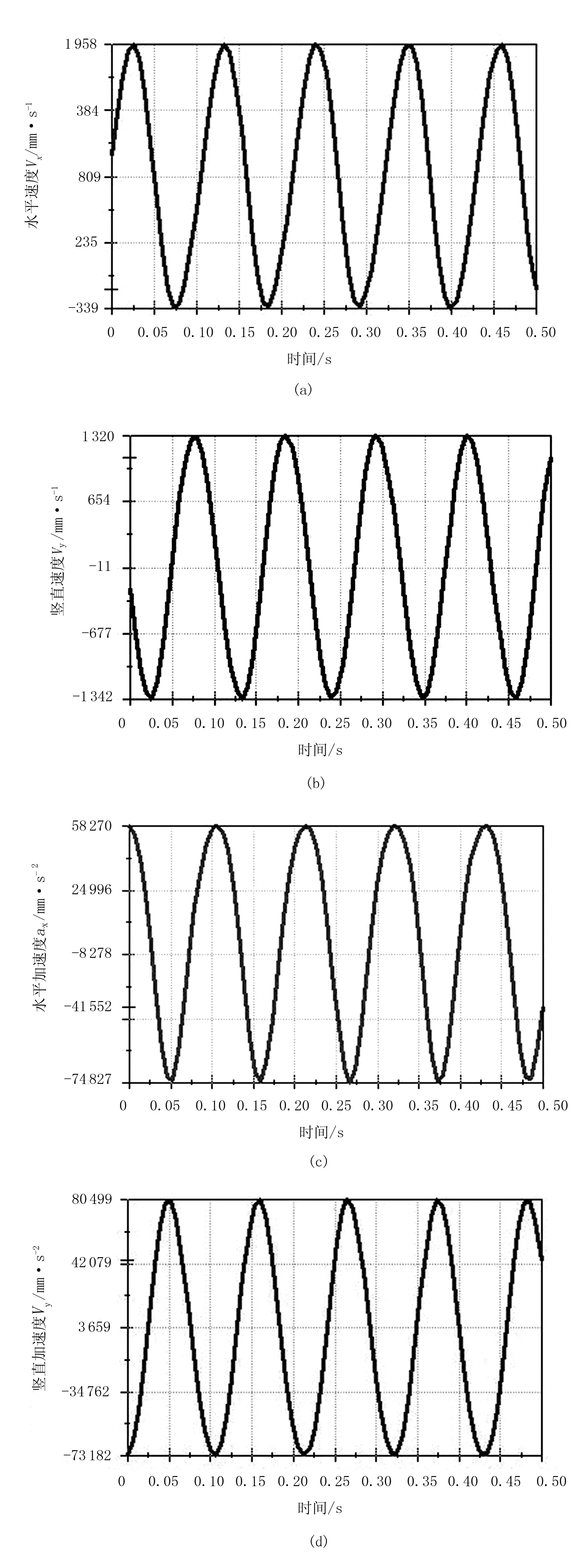
图6 铲翼速度与加速度特性Fig.6 Shovel wing velocity and acceleration characteristics
在切削中段,水平速度分量达到最大时振动方向的速度分量也达到最大值,此时合成切削速度达到最大,加速度变为零。这时,深松铲切削力最大对土壤的切削作用最强,有利于打破坚硬的板结层。当水平和竖直方向的速度减小到零时,水平方向加速度达到负值最大值,竖直方向也达到最大值,开始进入抬升土壤阶段,合成振动方向的速度斜向上。此时,竖直方向上对土壤有最大的抬升力,在切削阶段已被剪切破坏的土壤被迅速抬升,增加铲尖和铲翼对土壤的弯曲和剪切破坏作用。
对铲尖和铲翼的速度和加速度分量幅值进行对比分析表明:铲翼水平方向速度、加速度幅值比铲尖分别减小了17.9%和45.2%,但铲翼竖直方向速度、加速度幅值比铲尖分别增加了71.9%和80.2%。铲尖较大的水平速度和加速度有利于深松铲在坚硬的犁底层中的切土性能,打破犁底层,减小作业阻力。铲翼是在已经深松过的表层耕作层土壤中进行二次切削,较大竖直方向的速度和加速度增加了对土壤的弯曲和剪切破坏,有利于破碎土壤提高深松效果,减小耕作阻力。
3 田间试验研究
3.1 试验条件和仪器设备
1)试验条件:2015年9月1号,在广东世界银行农业面源污染治理项目广东省河源市连平县保护性耕作试点区农田中进行,为丘陵地形,田块地势平担坡度小于5°,春种玉米冬种绿叶菜类等作物,地表有杂草和少量收获后残留的作物秸秆。土壤类型为砖红壤壤质黏土,年均降雨量1 880~2 000mm。由于长期旋耕、单一施用化肥、轮式机具的反复碾压及丰富降雨,使土壤自然沉降水、土流失造成试验地块耕层浅土壤板结严重。土壤含水率为24.09%,土壤坚实度为4.92×103Pa。
2)试验仪器设备:试验使用东方红-LX1204和常发CFG804A两台4轮驱动的拖拉机,动力输出轴转速为540/1 000r/min。TYD-2土壤坚实度仪;XATB数显调节恒温202-A台式干燥箱;SF-400A型电子称,量程5kg,精度0.1g;70mm×40mm(R×H)规格的取土铝盒20个;AKS-02奥克斯50M卷尺;广测YZC-528型3吨S型拉压传感器;美国国家仪器NATIONAL INSTRUMENTS数据采集系统,系统包含NI cRIO-9073机箱、NI 9205、NI 9411、NI 9401、NI 9802、NI 9234板卡;两条5m5t强拖车绳;4个U型钩等。另外,还有1个秒表(Iphone6s内置计时器)、1台宏碁4741G笔记本电脑、1台1ZTS-200振动深松施肥多用机整机。
3.2 试验方法
广东省河源市连平县保护性耕作试点区农田原先已被划分为长60~80m、宽20~35m的长方形田块,直接以每一块田作为一个试验小区,试验小区中间20m作为测量区域。试验分为3个环节进行,根据国家标准GB/T 5262-2008 《农业机械试验条件 测定方法的一般规定》和GB/T 24675.2-2009 《保护性耕作机械 深松机》的试验方法和检测指标,深松前测量土壤特性:土壤坚实度和土壤含水率,深松过程中测量耕作阻力、作业速度及机组滑转率;深松完成后,测量深松深度、土壤坚实度等参数。试验时,东方红-LX1204作为牵引机,常发CFG804A悬挂振动深松机、拉力传感器安装在两个拖拉机之间,如图7(a)所示。试验作业时,东方红-LX1204拖拉机挂高速1挡,常发CFG804A拖拉机挂空挡动力输出轴转速为540rad/min使深松机产生振动。另外,设有常发CFG804A拖拉机动力输出轴停止使深松机不振动的对照试验组和深松机不深松的空载试验组。前面两试验组牵引阻力减去空载试验组的牵引阻力就是深松机的耕作阻力。试验时拉力传感器和NI数据采集系统连接,连续采集数据。振动深松后地表如图7 (b)所示。
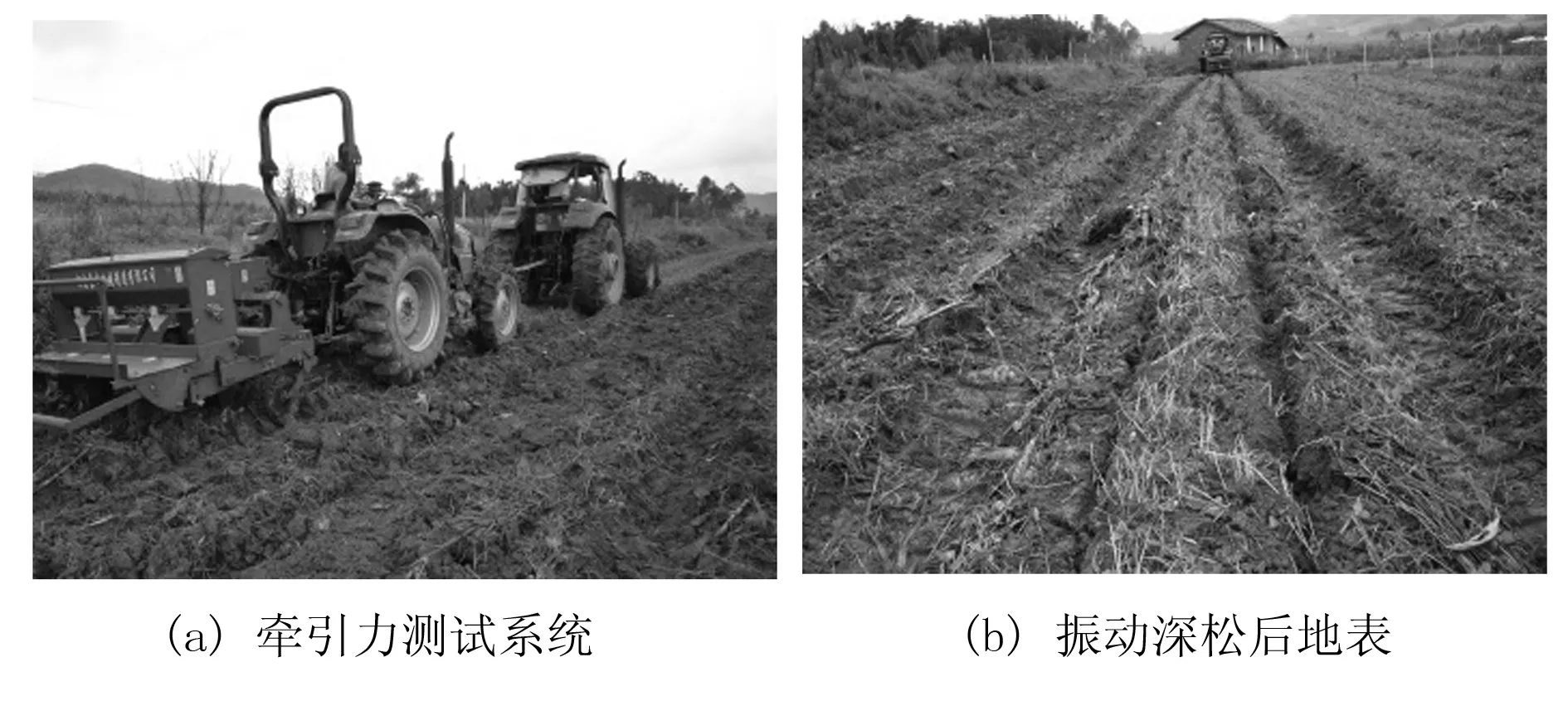
图7 田间试验Fig.7 Field experiment
3.3 田间试验结果分析
3.3.1 土壤坚实度测定结果分析
利用圆锥杆为直径12mm的坚实度仪测定深松前后土壤坚实度,如表1所示。
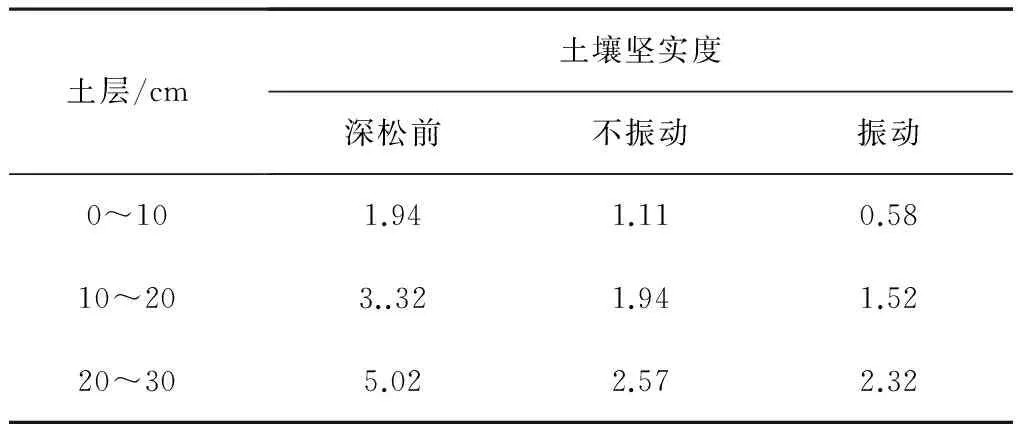
表1 土壤坚实度对比
由表1可知:深松可以对土壤进行疏松破碎,有效降低了土壤坚实度,疏松土壤,提高了土壤透气和保墒蓄水的能力,且振动深松比不振动深松更能疏松土壤、降低坚实度。深松后10~30cm土层的坚实度降低在40%~54%之间,特别是在0~10cm土层振动深松使土壤坚实度比深松前降低了70.1%,远大于不振动深松的42.7%。这和前面的分析铲翼是在已经深松过的表层耕作层土壤中进行二次切削能增加对土壤的弯曲和剪切破坏有利于破碎土壤,提高深松效果相符合。
3.3.2 耕作牵引力测定结果分析
振动组的试验参数:深松深度30cm,前进速度为0.8m/s,振幅为13.5mm,振动角为5°,振动频率为9.2Hz,拉压传感器数据采样频率为50Hz。不振动和空载的试验参数:前进速度0.8m/s,拉压传感器数据采样频率50Hz。只挂载中间两把深松铲在田间试验,得到振动、不振动和空载的牵引力对比,如图8所示。
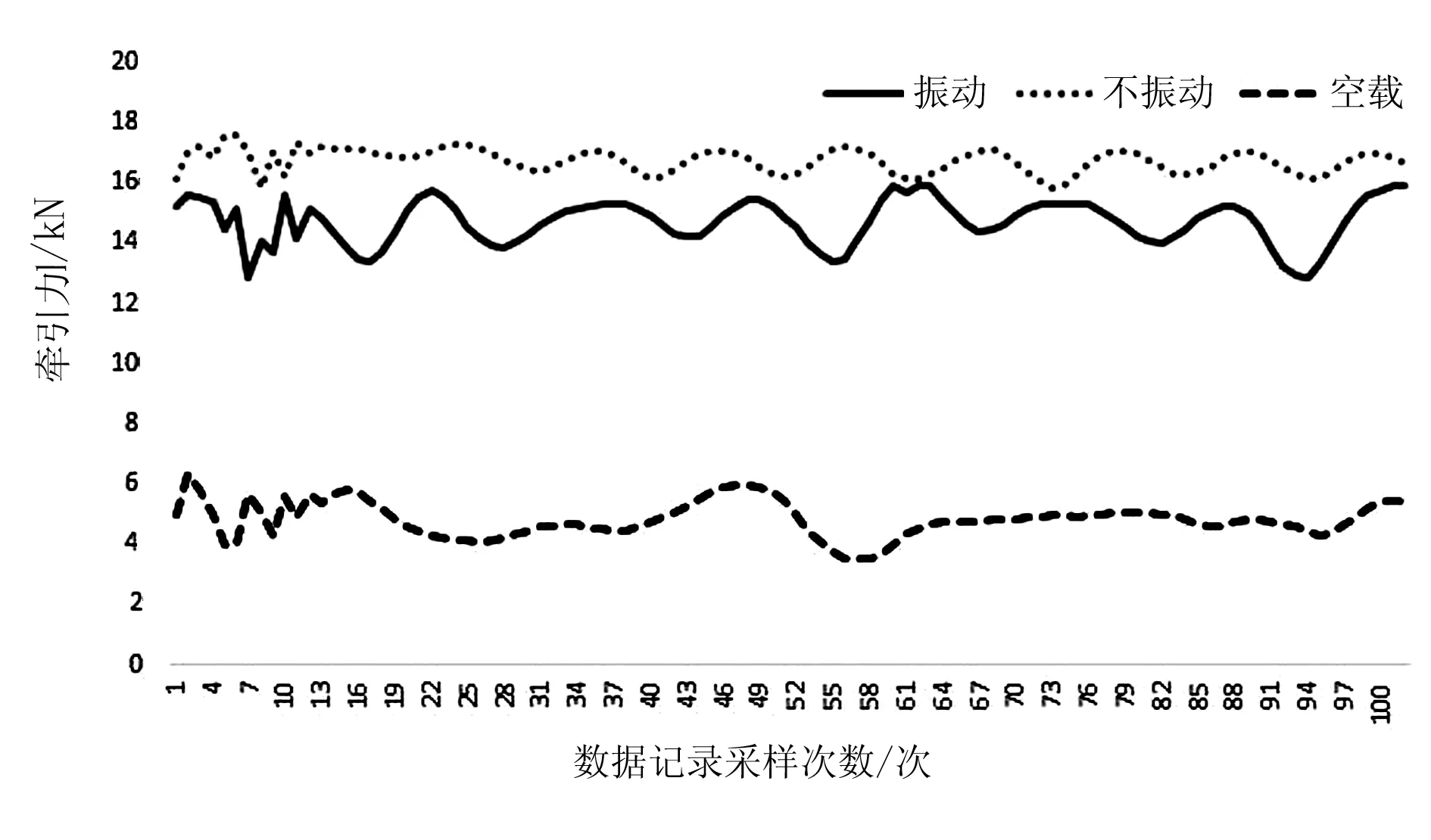
图8 牵引力对比Fig.8 Compare traction force
从图8可以看出:牵引力随时间而变化,曲线为不规则的波浪形。这主要由于土壤质地不均匀、土壤地表不平及地表杂草和作物残茬变化引起阻力不断变化;振动深松的牵引阻力比不振动深松的牵引阻力要小,通过计算得出振动深松相比不振动深松可以减少3.2%~ 27.2%的牵引力。结果表明,振动深松减阻效果还比较明显。
4 结论
1) 根据带翼振动深松铲的运动特性,铲翼在振动深松过程包括切削土壤和提升土壤两个阶段,这两个阶段交替进行且和铲尖同步。铲翼在已经深松过的表层耕作层土壤中进行二次切削,可以较小的耕作阻力增加对土壤的弯曲和剪切破坏,有利于破碎土壤、提高深松效果。
2) 根据田间试验结果分析得出:振动深松后在10~20cm和20~30cm土层的坚实度降低了54.2%和53.7%,不振动深松10~20cm和20~30cm土层的坚实度降低了41.6%和48.8%。特别是在0~10cm土层,振动深松使土壤坚实度比深松前降低了70.1%,远大于不振动深松的42.7%。由此说明:振动深松的松土效果好于不振动深松,且铲翼对于表层土壤的疏松效果特别好,与运动特性分析结果相符合。
3)不振动深松作业为对照组的试验结果表明,振动能使带翼深松铲牵引阻力降低3.2%~ 27.2%。
[1] 张祥彩,李洪文,何进,等. 耕作方式对华北一年两熟区土壤及作物特性的影响[J]. 农业机械学报,2013,44(S1):77-82.
[2] 郑洪兵,郑金玉,罗洋,等.长期不同耕作方式下的土壤硬度变化特征[J]. 农业工程学报,2015,31(9):63-70.
[3] 罗锡文,邵耀坚.土壤深松技术在甘蔗生产中的应用[ J].农业机械学报,1997,28(1):39-42.
[4] 张瑞富,杨恒山,高聚林,等.深松对春玉米根系形态特征和生理特性的影响[J]. 农业工程学报,2015 31(5):78-84.
[5] 李霞,付俊峰,张东兴,等.基于振动减阻原理的深松机牵引阻力试验研究[J].农业工程学报,2012,28(1):32-36.
[6] 朱瑞祥,张军昌,薛少平,等. 保护性耕作条件下的深松技术试验[J]. 农业工程学报,2009,25(6):145-147.
[7] 彭卓敏,丁艳,朱继平,等.耕作机械节能减排检测技术分析与研究[J]. 中国农机化,2009(5):69-71,75.
[8] 张金波,佟金,马云海. 仿生减阻深松铲设计与试[J].农业机械学报,2014,45(4):141-145.
[9] Kasisira L L, du Plessis H L M. Energy optimization for subsoilers in tandem in a sandy clay loam soil[J].Soil and Tillage Research,2006, 86(2):185-198.
[10] 张强,张璐,于海业,等.复合形态深松铲耕作阻力有限元分析与试验[J].农业机械学报,2012,43(8):61-65.
[11] 甄文斌,杨丹彤,黄世醒,带翼深松铲的试验研究[J].农机化研究,2011,33(8):119-122.
[12] 邱立春,李宝筏. 自激振动深松机减阻试验研究[J]. 农业工程学报,2000,16(6):72-76.
[13] 白景峰,李博,吕秀婷,等.基于狗獾爪趾的仿生深松铲振动减阻研究[J].农机化研究,2016,38(5):224-227.
[14] Busscher W J,Bauer P J,Frederick J R.Deep tillage management for high strength southeastern USA Coastal Plain soils[J]. Soil and Tillage Research, 2006, 85: 178-185.
[15] Temesgen M, Hoogmoed W B,Rockstrom J,et al.Conservation tillage implements and systems for smallholder farmers in semi-arid Ethiopia[J].Soil and Tillage Research,2009, 104:185-191.
[16] 王俊发,刘孝民,陈玉芳,等. 振动深松机理的探讨[J]. 佳木斯大学学报,2000,18(4):335-338.
[17] 辛丽丽,李传琦,梁继辉,等. 考虑分段土壤作用力的振动减阻分析[J]. 农业机械学报,2014,45(2):136-140.
[18] 高焕文.保护性耕作技术与机具[M].北京:化学工业出版社,2004.
[19] 孙一源.农业土壤力学[M].北京:中国农业出版社,1985.
Kinetic Characteristic Analysis and Experimental Study for Subsoiler with Wing
Wei Zhongji, Zheng Dingke, Yang Dantong, Sun Fangyuan
(Key Laboratory of Key Technology on Agricultural Machine and Equipment, Ministry of Education, South China Agricultural University, Guangzhou 510642, China)
Southern soil is viscosity, easily compacted and compaction. In order to solve the problems of deep loosening of machine-cultivated resistance and poor quality of deep loosening. This paper studied mechanism of Winged subsoiler vibrational subsoiling. Through emulated motion of machine deep loose parts and analyzed the velocity, acceleration, trajectory, could learn that cutting and lifting soil processes of Shovel and Shovel wing tip were synchronized alternately. Shovel sharp have large horizontal acceleration amplitude and main cutting soil,Wings shovel have large vertical acceleration amplitude and main lift the soil. Shovel wing secondary crushing loose for soil, farming resistance can be reduced and the loosing soil quality can be improved. Field test results show: After vibrational deep loosening, in 10-20cm and 20-30cm soil strength was reduced by 54.2% and 53.7%. Not vibrational deep loosening, in 10-20 cm and 20-30cm soil strength was reduced by 41.6% and 48.8%. Especially in 0~10cm soil vibration subsoiling soil firmness than before subsoiling decreased 70.1%, is greater than 42.7% of not deep loosening vibration. Winged subsoiler vibration subsoiling compared to no vibration can be reduced by 3.2%-27.2% of the traction force resistance, drag reduction effect is obvious. The study can provide a reference basis for futher optimization of the mechanical structure and to improve the working performance of the deep loosening machine in the south.
subsoiler; shovel wing; vibrations; resistance reduction
2016-09-25
世界银行全球环境基金赠款广东保护性耕作项目(2014-2018)
韦钟继(1991-),男,广西柳州人,硕士研究生,(E-mail)214886161@qq.com。
郑丁科(1971-),男,广东连平人,副教授,硕士生导师,(E-mail)dkzheng@scau.edu.cn。
S222.19
A
1003-188X(2017)12-0032-06
