基于光纤光栅和支持向量机的声发射定位系统*
2017-03-15张法业姜明顺隋青美李东升曹玉强路士增
张法业, 姜明顺, 隋青美, 李东升, 曹玉强, 路士增
(山东大学控制科学与工程学院 济南,250061)
基于光纤光栅和支持向量机的声发射定位系统*
张法业, 姜明顺, 隋青美, 李东升, 曹玉强, 路士增
(山东大学控制科学与工程学院 济南,250061)
利用光纤光栅传感器和边缘滤波原理构建传感系统,结合小波分解与重构和支持向量机算法,对铝合金板声发射定位进行了研究。根据划分区域进行声发射实验,探索声发射源所在区域与信号特征之间的关系。在对声发射信号进行小波分解的基础上,使用近似系数和细节系数进行重构,并对重构后的各信号计算其振荡能量作为信号特征,进行声发射区域识别。以重构信号的振荡能量作为输入、声发射区域位置类别作为输出构建支持向量机多分类模型,实现了声发射区域定位识别。实验结果表明,在400 mm×400 mm×2 mm的铝合金板上对36个测试样本进行了多次声发射区域定位识别,在180次模拟实验中实现了176次声发射区域准确定位,正确率达到97.78%,声发射区域识别精度为30 mm×30 mm。该研究结果为机械结构的声发射区域定位检测提供了有效方法。
光纤光栅; 声发射区域定位; 支持向量多分类机; 小波分解与重构; 信号特征提取
引 言
大型机械结构通常工作环境恶劣、工作强度高、结构复杂、零部件工作负荷繁重,结构疲劳损伤是其最危险的一种损伤形式,它会导致结构力学性能大幅降低而无法识别[1-2]。在结构疲劳损伤产生过程中,金属变形、摩擦、微小裂纹的产生和扩展等会局部快速释放能量产生声发射,因此声发射源位置的确定是实现大型机械健康监测的首要环节,对大型机械结构的安全运行至关重要。在声发射定位系统中,声发射传感器是实现声发射信号检测和定位的关键部件之一。光纤光栅声发射传感器以其良好的绝缘性、结构紧凑、安装方便和易于构建传感器网络等优势,解决了传统压电声发射传感器易受电磁干扰、不能在高压和腐蚀等恶劣环境中应用的问题,在声发射检测和定位系统中获得了广泛应用。李宁等[3]利用光栅声发射检测方法检测轴承外圈缺陷引起的声发射信号,所得信号谱底噪声小、谱线清晰,优于压电式声发射传感器测得的信号。Pratik等[4]利用6只光纤光栅声发射传感组成的传感阵列并结合参考数据库算法实现了复合材料机翼声发射定位。Kim等[5]使用单只光纤光栅声发射传感器在加筋复合材料板上进行声发射信号检测和低速冲击源定位。
近年,国内外学者对声发射源定位算法做了大量研究。Yang等[6]利用多重信号分类算法和小波分析定位冲击产生的声发射源,平均误差为9.47 mm。Xu等[7]使用经验模式分解结构损伤产生的声发射信号S0模式的固有模态函数获得波速,实现声发射源定位,最大误差为31.14 mm,平均误差为19.73 mm。Li等[8]使用交叉时间频谱法定位天然气管道泄漏产生的声发射源,在67.7 m长的管道上实现了泄漏点定位,定位最大误差为2.6 m,平均误差为1.0 m。以上定位算法均需使用声发射信号到达时间或传播速度。在实际应用中,在噪声和频散效应的影响下,信号到达时间和传播速度难以精确获取。因此,有学者利用智能算法进行声发射定位。Cheng等[9]使用BP小波神经网络算法在转子试验机上定位摩擦产生的声发射源,误差不超过70 mm。但是,由于在实际工程应用中难以提取大量样本用于算法训练,这些算法多用于实验室中。
声发射定位需要一种小样本的定位方法。笔者利用钢球冲击铝合金板模拟声发射源,采用具有体积小、本征抗电磁干扰等优点的光纤布拉格光栅和边缘滤波原理构建传感系统,利用小波分解与重构[10-11]提取声发射信号特征,建立支持向量多分类机模型,实现了声发射区域定位。
1 声发射定位算法
1.1 基于小波分解与重构算法的信号特征提取
在铝合金板声发射定位实验中,铝合金板上质点的振动是由材料中局部快速释放能量产生的瞬态弹性波在板上传播引起的[12-13]。由于不同频率成分的弹性波传播速度不同,使得弹性波传播给板上不同位置的动能不是同时完成的,能量的传递需要一定的时间才能完成。因此,铝合金板上不同位置的传感器所接收的振动信号能量会存在差异。振荡能量可用来表征振动信号能量差异,其定义如下。
(1)
经采样得到的时间序列为F=(f(T),f(2T),…,f(nT)),则信号的振荡能量表示为
(2)

小波分析可对信号的低频和高频部分进行分解,根据被分析信号的特征自适应地选择相应频带,使之与信号频谱相匹配,从而提高时频分辨率,有效反映信号的时频特征。笔者选择具有正交性、信号局部特征性描述能力较强等优点的Db4小波作为声发射信号特征提取的小波函数,利用近似系数和细节系数对小波分解后的声发射信号进行重构,计算各个重构信号的振荡能量作为模型的特征参数。
1.2C-SVC多分类算法
支持向量分类算法(C-supportvectorclassification, 简称C-SVC)通过建立一个分类超平面作为决策曲面,使n维空间中正类和负类之间的隔离被最大化,从而实现空间上点的分类[14-15]。其两分类算法表述如下。
设定训练集T={(x1,y1),(x2,y2),…,(xl,yl)}∈(X,Y)l,其中,xi∈X=Rn,yi∈{1,-1},i=1,2,…l,则可以选取核函数K(xi,yi)和惩罚参数β构造最优化问题,即
(3)
其中:s.t.为约束条件。

(4)
其中:σ为核宽;‖·‖代表欧式范数。
求解式(4)得到最优解为
(5)

(6)
得到决策函数为
(7)
上述算法解决了两分类问题。当处理多分类问题时,需要通过组合多个两分类器实现多分类器,即将某个类别的数据样本归为一类,其他剩余的数据样本归为另一类,这样k个类别的数据样本就构造出了k个两分类器。当进行多分类判别时,将未知样本分类为具有最大分类函数值的那类。
1.3 声发射区域定位算法
基于支持向量多分类机的声发射定位算法流程可总结为:a. 在铝合金板上划分p个待识别正方形区域,使用钢球冲击划分的区域产生声发射信号,利用搭建的声发射采集系统采集该信号作为原始数据样本;b. 采用Db4小波对原始数据样本进行小波分解,并使用近似系数和细节系数进行小波重构,计算重构信号的振荡能量作为声发射信号特征;c. 以重构信号的振荡能量组成C-SVC多分类机模型数据样本,并划分训练数据样本和测试数据样本;d. 使用训练数据样本,选择模型输入为光纤布拉格光栅(fiberBragggrating,简称FBG)传感器检测到的声发射信号特征,模型输出为待识别区域,建立由p个C-SVC两分类器组成的C-SVC多分类机模型;e. 使用测试数据样本对构建C-SVC多分类机模型进行验证,实现声发射区域定位。
2 声发射定位系统搭建
2.1FBG应变原理
FBG传感基本原理为
λB=2neffΛ
(8)
其中:λB为布拉格光栅反射波长;neff为光栅的有效折射率;Λ为光栅周期。
在不考虑温度影响的情况下,声发射产生的应力波作用于FBG后,应力波会对其有效折射率neff和光栅周期Λ进行调制,使反射波长λB发生变化。
声发射产生的应力波作用于FBG时,光栅轴向受到非均匀应变场作用,式(8)可改写为
(9)
其中:p11和p12为有效弹光系数;υ为光纤的泊松系数;neff0和Λ0分别为初始状态下的有效折射率和周期;εAE为应力波产生的应变场。
式(9)表明,当铝合金板受到钢球冲击产生声发射信号时,粘贴在铝合金板上的FBG波长将产生变化。
2.2 声发射定位系统搭建
声发射定位系统主要由未经平坦的放大自发辐射(amplifiedspontaneousemission,简称ASE)光源、分路器、环行器、光电转换及放大电路、数据处理单元、4只FBG传感器和示波器组成。系统框图和实物图如图1(a)和图2所示。为实现声发射信号的快速解调,利用ASE光源线性段作为边缘滤波器,结合边沿滤波解调原理构建光纤光栅解调系统,其工作示意图如图1(b)所示。当声发射信号作用于FBG引起其反射峰出现漂移Δλ时,由于ASE光源斜边滤波的调制,反射峰的强度产生相应变化。这种变化通过光电转换及放大电路转化成电压信号变化,最后经过数据处理单元滤波处理后在示波器上显示信号波形。
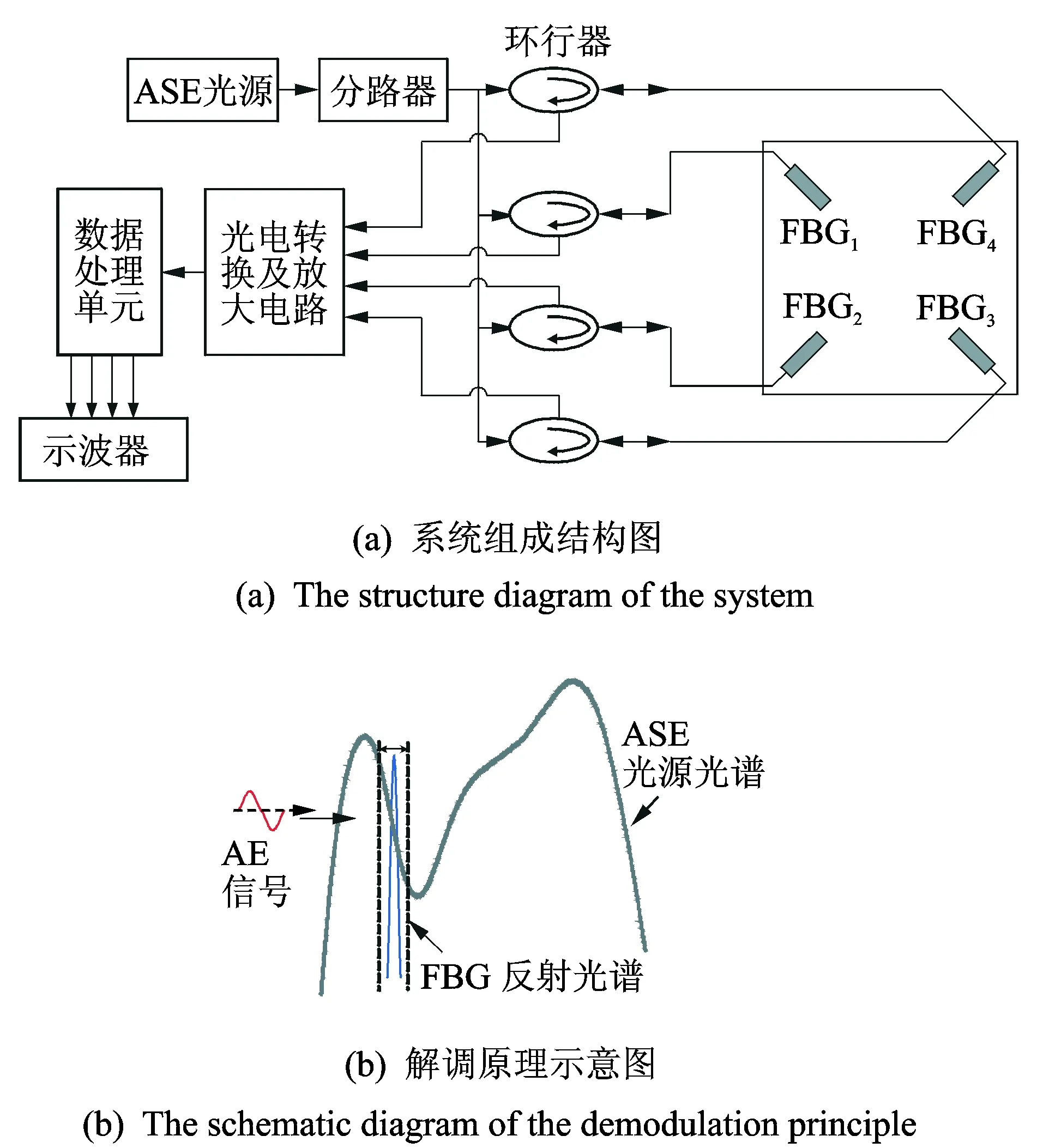
图1 声发射定位系统框图Fig.1 The diagram of AE location system
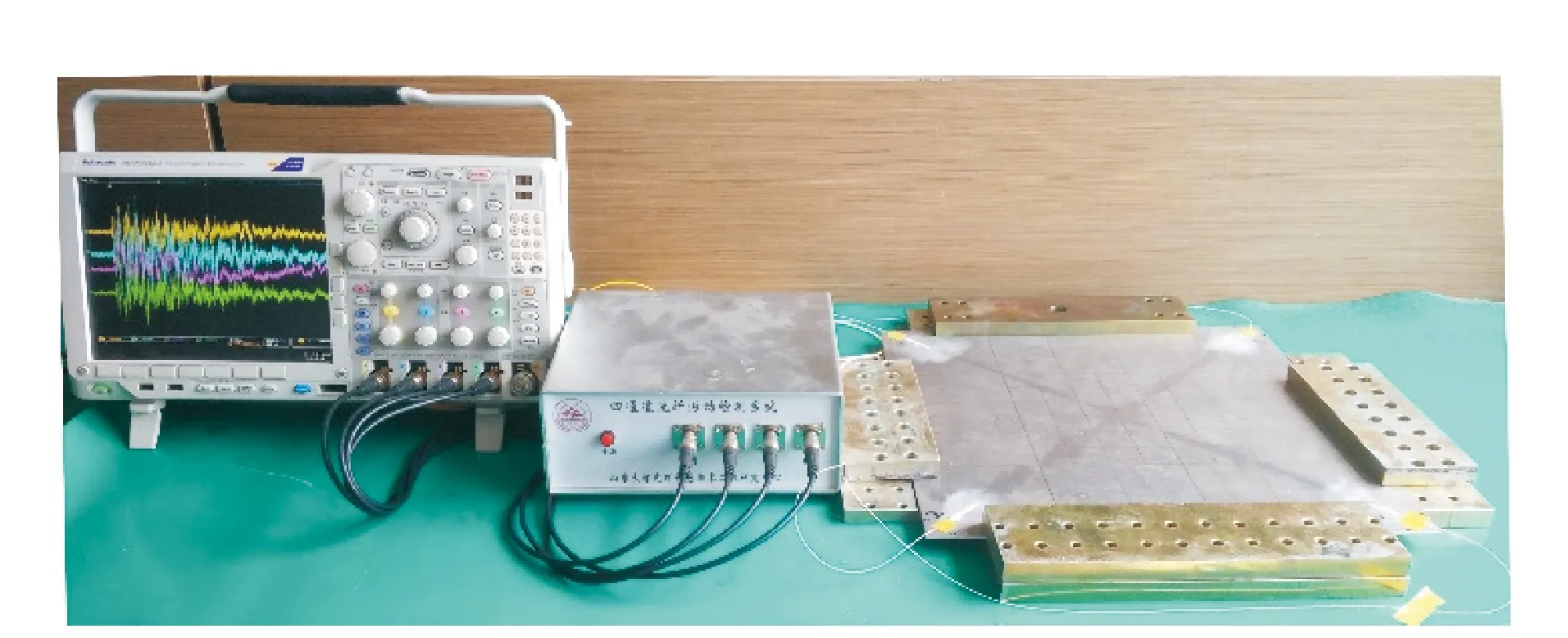
图2 声发射定位系统实物图Fig.2 The pictorial diagram of AE location system
系统使用的ASE光源光谱如图3所示。FBG1~FBG4的波长均选择在斜率最大的1 533nm~1 536nm单调区间内,光栅中心波长选为1 534nm,粘贴时施加预紧力拉伸至534.55,1 534.586,1 534.565和1 534.577nm。
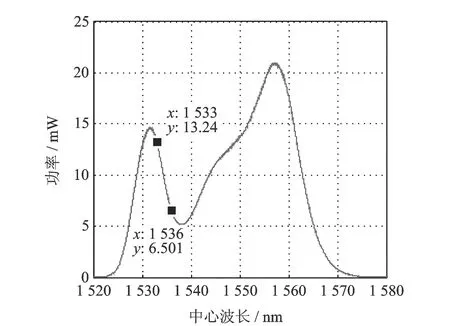
图3 ASE光源光谱图Fig.3 The ASE Laser Spectrum
选用400mm×400mm×2mm的铝合金板,四边固支在实验台上。在铝合金板上划分36个30mm×30mm的正方形作为待识别声发射区域,并将每一个正方形区域作为一类的类别,标记为S={1,2,…,36},这样就将声发射区域定位问题转化为C-SVC多分类问题,可以构建C-SVC多分类机予以解决。声发射区域划分如图4所示。
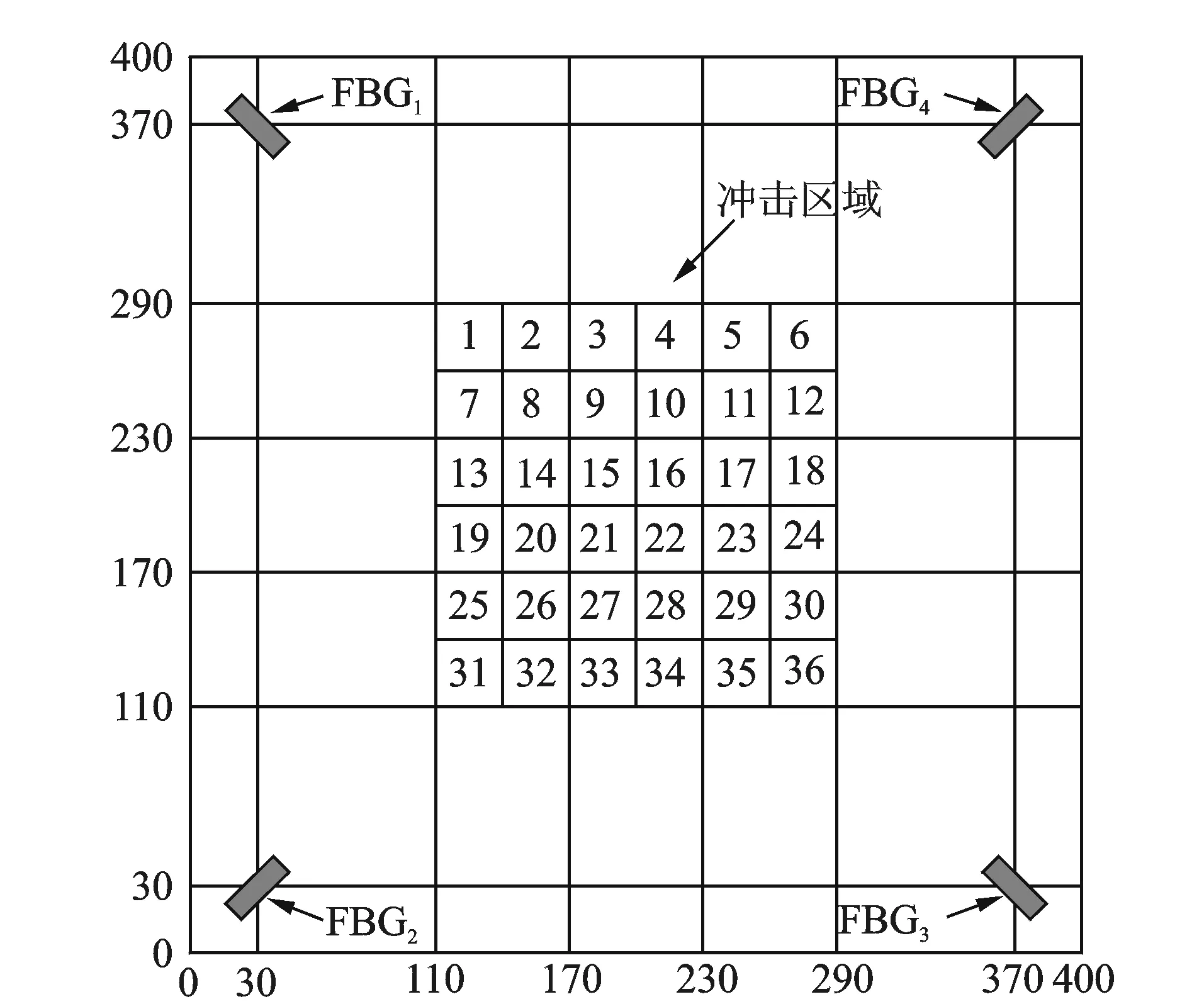
图4 铝合金板声发射区域示意图Fig.4 Layout of plate AE region on aluminum alloy
在铝合金板4个对角粘贴4只FBG传感器,中心波长及粘贴位置如表1所示。采用质量为26g的钢球作为声发射模拟装置,以自由落体的方式进行垂直冲击,冲击高度为260mm,对应的冲击能量为0.065J,冲击速度为2.24m/s。
表1 FBG传感器中心波长及粘贴位置
Tab.1 The wavelength of FBG Sensors and attaching position
传感器标记中心波长/nm粘贴位置/(mm,mm)FBG11534.552(30,30)FBG21534.586(370,30)FBG31534.565(370,370)FBG41534.577(30,370)
3 声发射定位实验及结果分析
3.1 声发射信号特征提取
在铝合金板内标记为1,8,15,22,29和36的划定区域上使用钢球进行冲击实验,以FBG1传感器监测的声发射信号为例研究声发射区域与信号特征
之间的关系。图5为对FBG1传感器监测区域1产生的声发射信号进行小波分解,选择Db4小波作为声发射信号处理小波函数。具体处理过程主要是选择近似系数和细节系数对分解后的声发射信号进行重构,并计算各个重构信号的振荡能量。
采用同样方法对FBG1传感器监测的上述6个位置的声发射信号进行处理。将不同区域产生的声发射信号的振荡能量特性做归一化处理后,以声发射区域为横坐标,以归一化后的振荡能量为纵坐标,绘制振荡能量与声发射区域柱形图,如图6所示。可以看出,FBG1传感器监测到的不同区域的声发射信号经小波重构后,各重构信号的振荡能量存在差异。表现为使用近似系数重构后信号的振荡能量随声发射冲击位置的远离而减小,使用细节系数重构后信号的振荡能量先减小后略微增大,说明FBG传感器所监测铝合金板声发射信号重构后振荡能量与声发射区域有关。因此,提取声发射信号经小波重构后信号的振荡能量作为信号特征可以用来进行声发射区域定位。
3.2 声发射区域定位识别
3.2.1 C-SVC多分类机模型建立
采用钢球依次冲击图4所示铝合金板上划定的36个声发射区域各10次,共产生10组声发射区域模型数据做训练样本,建立C-SVC多分类机模型。其中,选取FBG传感器监测信号小波重构后振荡能量作为多分类机输入,声发射区域作为C-SVC多分类机输出。影响C-SVC多分类机性能的主要因素为惩罚参数和核宽。为保证其性能,采用K-CV

图5 FBG1监测的区域1声发射信号波形图Fig.5 AE waveforms of FBG1 at area 1
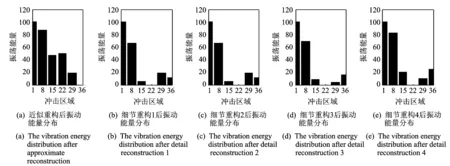
图6 不同位置声发射信号振荡能量分布图Fig.6 The vibration energy distribution of AE signal at different locations
(K-fold cross validation)方法选取惩罚参数c为103.9683,核宽g为0.143 6。将获取的惩罚参数c、核宽g和10组实验样本代入C-SVC多分类机进行训练,训练样本的声发射区域识别结果如图7所示。可以看出,C-SVC分类机对10组训练样本均实现了正确的声发射区域识别。
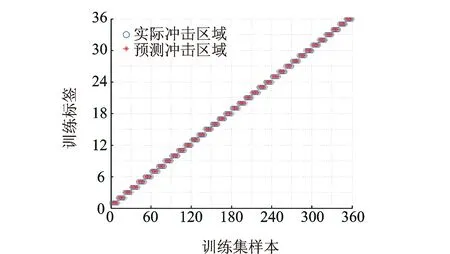
图7 训练样本的声发射区域识别结果Fig.7 Identification results of AE region based on training samples
3.2.2 C-SVC多分类机模型验证

图8 预测样本的声发射区域识别结果Fig.8 Identification results of AE region based on prediction samples
建立C-SVC多分类机后,再次使用钢球对图4所示铝合金板上划定的36个声发射区域进行冲击各5次,产生5组声发射区域模型数据作测试样本,对建立的C-SVC多分类机模型进行验证。将测试样本代入C-SVC多分类机模型进行声发射区域识别,如图8所示。图8表明:对待测试的36个声发射区域各5次模拟实验(共计180次)中,基于C-SVC多分类机声发射区域识别算法实现了176次声发射区域的准确定位,正确率为97.78%。分析区域定位错误的4次实验,发现基于C-SVC多分类机的声发射区域识别算法将其定位在实际声发射区域的相邻区域内(如第103次实验将实际声发射区域21错误地定位于声发射区域27),属于工程应用可接受范围。实验表明,基于S-SVC多分类机的声发射区域定位系统具有可行性,区域识别精度为30 mm×30 mm。
4 结束语
利用小波分解与重构和支持向量机算法,结合光纤光栅传感系统,实现了铝合金板声发射区域定位识别。利用小波分解与重构对采集到的声发射信号进行处理,计算各重构信号的振荡能量。以振荡能量为模型输入,以声发射区域为模型输出,搭建了基于支持向量机的光纤光栅声发射区域定位系统,并进行了实验研究。结果表明:该系统对36个测试样本进行了多次声发射区域定位识别,在180次模拟声发射实验中实现了176次声发射区域准确定位,正确率达到97.78%,声发射区域的识别精度为30 mm×30 mm。因此,利用小波分解与重构和支持向量机算法,结合光纤光栅传感系统实现铝合金板声发射区域定位具有可行性。
[1] Daniel W P, Laurent M, Nicolas L, et al. Experimental evaluation of contact stress during cold rolling process with optical fiber Bragg gratings sensors measurements and fast inverse method[J]. Journal of Materials Processing Technology, 2015, 223(9): 105-123.
[2] 莫固良,汪慧云,李兴旺, 等. 飞机健康监测与预测系统的发展及展望[J]. 振动、测试与诊断,2013, 33(6): 925-930.
Mo Guliang, Wang Huiyun, Li Xingwang, et al. Health monitoring and prognostics system for aircraft[J]. Journal of Vibration, Measurement & Diagnosis, 2013, 33(6): 925-930.(in Chinese)
[3] 李宁,魏鹏,莫宏, 等. 光纤光栅声发射检测新技术用于轴承状态监测的研究[J]. 振动与冲击,2015,34(3):172-177.
Li Ning, Wei Peng, Mo Hong, et al. Bearing state monitoring using a novel fiber Bragg grating acoustic emission technique[J]. Journal of Vibration and Shock, 2015, 34(3): 172-177. (in Chinese)
[4] Pratik S, Kim J H, Park Y, et al. Impact localization on composite wing using 1D array FBG sensor and RMS/correlation based reference database algorithm[J]. Composite Structures, 2015, 125(1): 159-169.
[5] Kim J H, Kim Y Y, Park Y, et al. Low-velocity impact localization in a stiffened composite panel using a normalized cross-correlation method[J]. Smart Mater Struct, 2015, 24(4): 045036.
[6] Yang H J, Shin T J, Lee S. Source location in plates based on the multiple sensors array method and wavelet analysis[J]. Journal of Mechanical Science and Technology, 2015, 28(1): 1-8 .
[7] Xu Baochun, Yuan Shenfang, Wang Mulan, et al. Determining impact induced damage by lamb wave mode extracted by EMD method[J]. Measurement, 2015, 65(4): 120-128.
[8] Li Shuaiyong, Wen Yumei, Li Ping, et al. Leak location in gas pipelines using cross-time-frequency spectrum of leakage-induced acoustic vibrations[J]. Journal of Sound and Vibaration, 2014, 333(17): 3889-3903.
[9] Cheng Xinmin, Zhang Xiaodan, Zhao Li, et al. The application of shuffled frog leaping algorithm to wavelet neural networks for acoustic emission source location[J]. Comptes Rendus Mecanique, 2014, 342(4): 229-233 .
[10]芦吉云,王帮峰,梁大开. 基于小波包特征提取及支持向量回归机的光纤布拉格光栅冲击定位系统[J]. 光学精密工程,2012,20(4):712-718.
Lu Jiyun, Wang Bangfeng, Liang Dakai. Identification of impact location by using FBG based on wavelet packet feature extraction and SVR[J]. Optics and Precision Engineering, 2012, 20(4): 712-718. (in Chinese)
[11]吴石,刘献礼,王艳鑫. 基于连续小波和多类球支持向量机的颤振预报[J]. 振动、测试与诊断,2012,32(1):46-50.
Wu Shi, Liu Xianli, Wang Yanxin. Chatter prediction based on cont inuous wavelet features and multi-class spherical support vector machine [J]. Journal of Vibration, Measurement & Diagnosis, 2012, 32(1): 46-50.(in Chinese)
[12]Shrestha P, Kim J H, Park Y, et al. Impact localization on composite wing using 1D array FBG sensor and RMS/correlation based reference database algorithm[J]. Composite Structures, 2015, 125: 159-169.
[13]Zhang Jinrui, Ma Hongyan, Yan Wangji, et al. Defect detection and location in switch rails by acoustic emission and Lamb wave analysis: a feasibility study[J]. Applied Acoustics, 2016, 105: 67-74.
[14]Aleksandar S, Seljko D. Optimal sizing and location of SVC devices for improvement of voltage profile in distribution network with dispersed photovoltaic and wind power plants[J]. Applied Energy, 2014, 134(11):114-124.
[15]路士增,姜明顺,隋青美, 等. 基于小波变换和支持向量多分类机的光纤布拉格光栅低速冲击定位系统[J]. 中国激光,2014,41(3):0305006.
Lu Shizeng, Jiang Mingshun, Sui Qingmei, et al. Identification of impact location by using fiber bragg grating based on wavelet transform and support vector classifiers[J]. Chinese Journal of Lasers, 2014, 41(3): 0305006.(in Chinese)

10.16450/j.cnki.issn.1004-6801.2017.01.030
*国家自然科学基金资助项目(41472260);山东省自然科学基金资助项目(ZR2014FM025);山东大学基本科研业务费资助项目(2014YQ009,2016JC012)
2016-06-24;
2016-07-06
TN254;TH39
张法业,男,1984年12月生,硕士、工程师。主要研究方向为光纤传感技术、光电子技术和信号处理。曾发表《基于可调谐DFB激光器的FBG加速度检测系统》(《光电子·激光》2015年第26卷第11期)等论文。
E-mail: zhangfaye@sdu.edu.cn
隋青美,女,1963年1月生,教授。主要研究方向为检测理论及应用和光纤传感技术。
E-mail: sdusuiqingmei@163.com
