智能微位移主动隔振模糊PID控制系统*
2017-03-15王常松韦利明梁天锡
梁 森, 王常松, 韦利明, 梁天锡
(1.青岛理工大学机械工程学院 青岛,266033) (2.中国工程物理研究院 绵阳,621900)
智能微位移主动隔振模糊PID控制系统*
梁 森1, 王常松1, 韦利明2, 梁天锡2
(1.青岛理工大学机械工程学院 青岛,266033) (2.中国工程物理研究院 绵阳,621900)
为了解决精密加工设备的微位移隔振问题,研制了一种以压电陶瓷为作动器的智能微位移主动隔振系统。在现有数据采集系统和激振器的基础上搭建了相应的实验平台,提出将模糊-比例积分微分(fuzzy-proportional integral derivative,简称Fuzzy-PID)算法理论应用到微位移的主动隔振控制中,在实验室虚拟仪器工程平台 (laboratory virtual instrumentation engineering workbench,简称LabVIEW)环境下开发了整个系统的算法控制程序,分别在扫频、随机和正弦激励信号下进行了微位移主动隔振实验。实验结果表明,受控后的振动位移大幅度降低,验证了该方法对微位移主动隔振的有效性。
智能结构; 主动隔振; 压电陶瓷作动器;模糊-比例积分微分(Fuzzy-PID)算法;微位移控制
引 言
随着制造技术的快速发展,越来越多的精密仪器和微纳米加工设备投入使用[1-3],实际中工件的制造尺度不断向微细化方向发展,逐渐由原来的微米级过渡到纳米级。对高精度工件的加工和检测必须要在隔振性能良好的平台上进行,否则任何微弱的振动都会对加工和测试结果产生影响,因此解决微纳米加工设备的隔振问题对工件加工系统的运行及制作精度的提高有重要意义。目前,常用的振动隔离控制方法主要是被动隔振结构[4-6],即在振动结构表面粘贴或在其内部嵌入黏弹性材料,使其在变形中消耗结构振动能量从而达到控制振动的目的。这些方法的优点是减振系统的可靠性较高,但系统一旦制作完成,很难改变其隔振性能,更不能对环境的变化做出适应的调节,难以满足精密仪器和微纳米设备的隔振要求。虽然压电主动隔振是目前的研究热点,但传统结构是在单自由度的弹簧、阻尼器和质量系统的基础上增加了压电材料,学者们通过改变弹簧、质量和阻尼器与压电材料的数量和串并联组合关系,根据不同的组合提出了不同的控制策略,并对其隔振规律作了大量研究,取得了可喜的成就[7-10]。由于高精度的弹簧和阻尼器的制作以及整个运动系统位移的控制都是一件非常困难的事情,这些隔振系统很难实现精密机床或微纳米设备的微位移级别的隔振精度。
笔者充分利用压电陶瓷的逆效应,设计了一个叠层式压电作动器,发展了一种由传感器、作动器和控制器组成的智能微位移主动隔振闭环控制系统,将Fuzzy-PID控制技术的相关原理[11-13]应用到振动主动控制中,解决了传统被动隔振和压电主动隔振系统不能解决的难题,为精密仪器和微纳米设备的主动隔振系统的设计及应用奠定了基础。
1 叠层式压电作动器
微位移主动隔振系统的作动器结构如图1所示。将多片压电材料堆叠放置,通过片间电极给每一层材料施加相同的电压,这样使每层压电材料在电学上实现并联,在力学上完成串联。假如忽略电极材料的影响,那么作动器在厚度方向的总变形等于各层在相同方向上的变形量迭加。
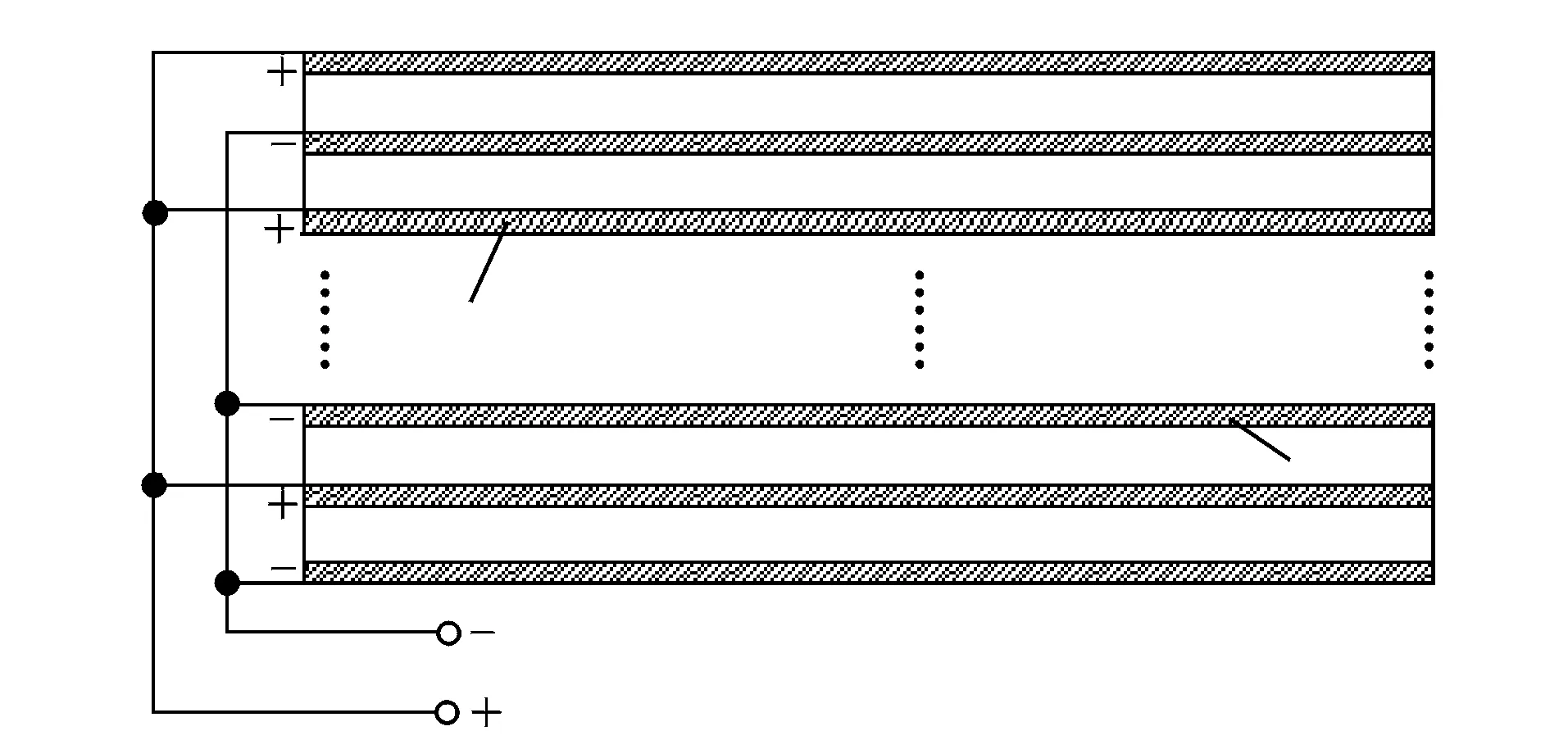
图1 叠层式压电作动器结构Fig.1 The multilayer piezoelectric ceramic actuator
根据压电方程[14-15]得到叠层式压电作动器的输出位移为
Δt=nd33U
(1)
其中:Δt为作动器输出的总变形量;n为压电片层数;d33为材料应变常数;U为控制电压。
2 微位移隔振系统及Fuzzy-PID算法
2.1 主动隔振控制系统
提出的微位移主动隔振控制系统由激振器(振源)、参考传感器、压电作动器、误差传感器、控制器、振动基体结构以及被控结构等组成。其中:误差传感器用于获得受控后的振动位移;参考传感器用于检测激振器初始振动信号。图2为整个系统的工作原理[11]。其中:p(n)为激振器的振动信号;s(n)为压电作动器次级振动;x(n)为基体振动;y(n)为控制电压;d(n)为期望振动信号;e(n)为受控后误差。

图2 微位移主动隔振控制系统Fig.2 The micro-displacement active vibration isolation control system
该主动隔振控制系统的工作原理为:激振器发出振动信号p(n),使基体产生振动x(n),同时在参考传感器上有期望信号d(n)产生(这里的x(n)和d(n)是一致的),将基体产生的振动x(n)作为控制器的输入,控制器按照控制算法产生输出电压y(n),经驱动器放大后施加在作动器上,使压电作动器得到与x(n)反相的振动信号s(n),在误差传感器上获得一个叠加后的e(n)并反馈给控制器,再经控制器修正算法中的被控参数,重新获得控制电压y(n)并输出。这样循环往复,不断更新受控参数,直到误差e(n)在设定的控制范围内。
2.2 Fuzzy-PID控制算法
PID控制器是一种按误差的比例、积分和微分进行控制的调节器[12]。图3为一种经典的PID 控制系统。其中:x(t)为PID的输入;y(t)为受控对象的输出;u(t)为PID的输出;e(t)为反馈误差。
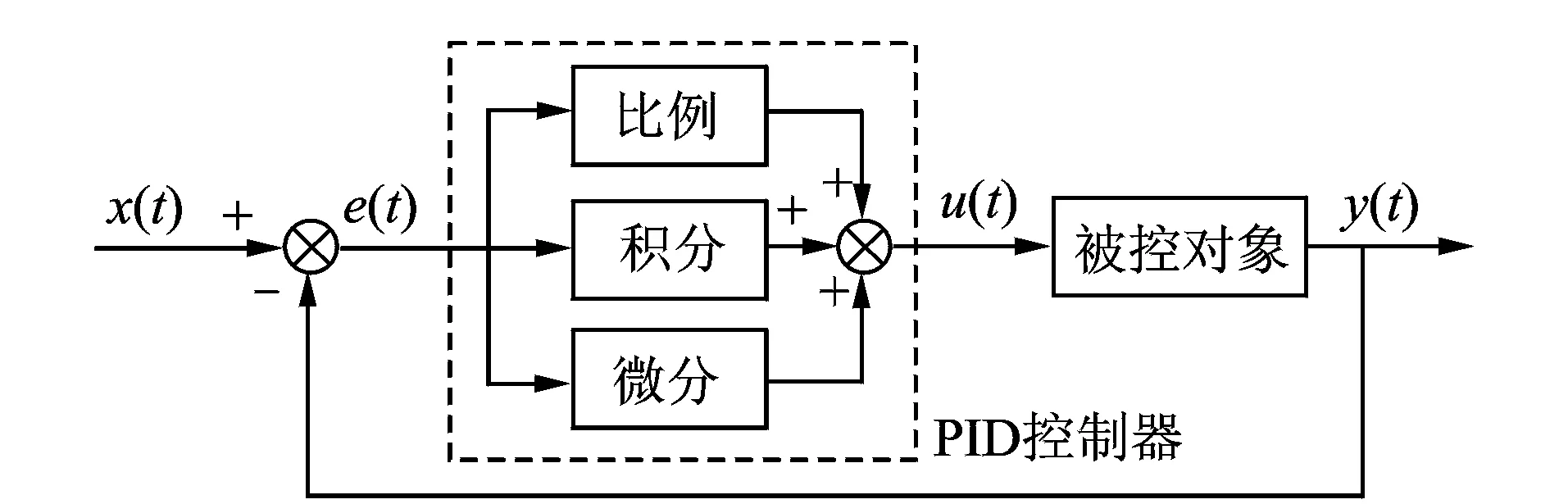
图3 经典的PID控制系统Fig.3 The classical PID control algorithm
Fuzzy-PID控制器由模糊控制器和PID控制器组合而成[13-14],具体如图4所示。其中:误差e(t)与误差变化ec(t)为模糊控制器的输入;比例、积分和微分系数Kp,KI和KD为模糊控制器的输出。
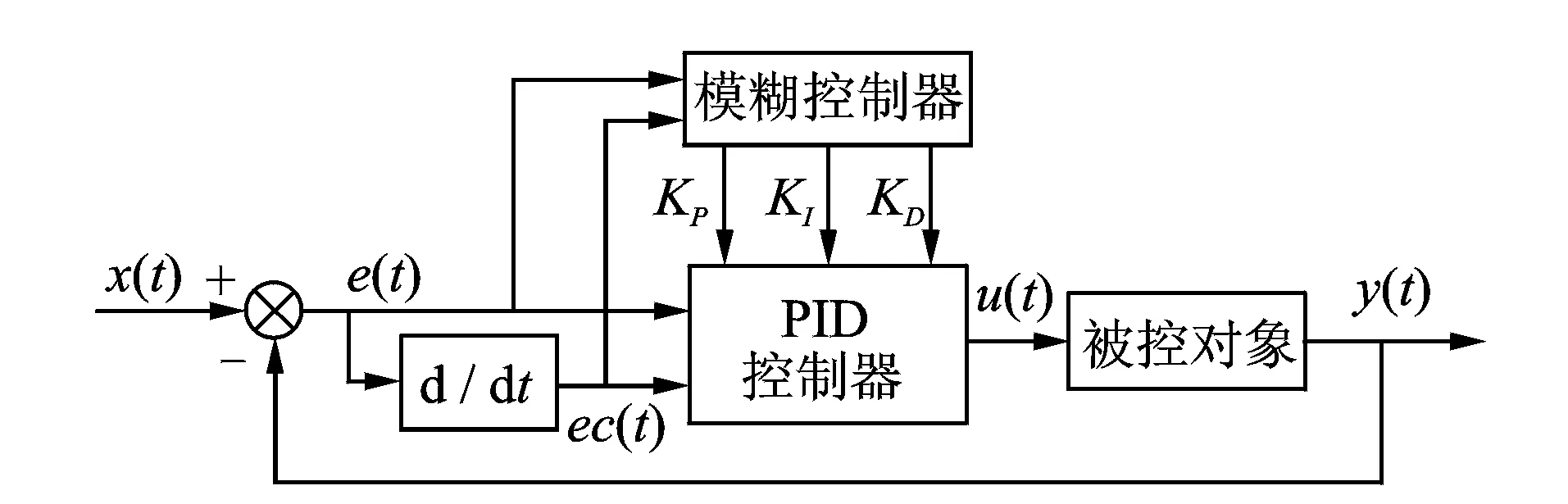
图4 Fuzzy-PID控制器Fig.4 The fuzzy-PID controller
Fuzzy-PID控制就是将误差及其变化e(t)与ec(t)以及比例、积分和微分系数Kp,KI和KD的变化范围按一定的规则划分成几个区间,如表1所示。当模糊控制器得到反馈误差e(t)和误差变化ec(t)所处的模糊区间,模糊控制算法就会根据表1中规则选取相应的比例、积分和微分系数Kp,KI和KD值作为输出。
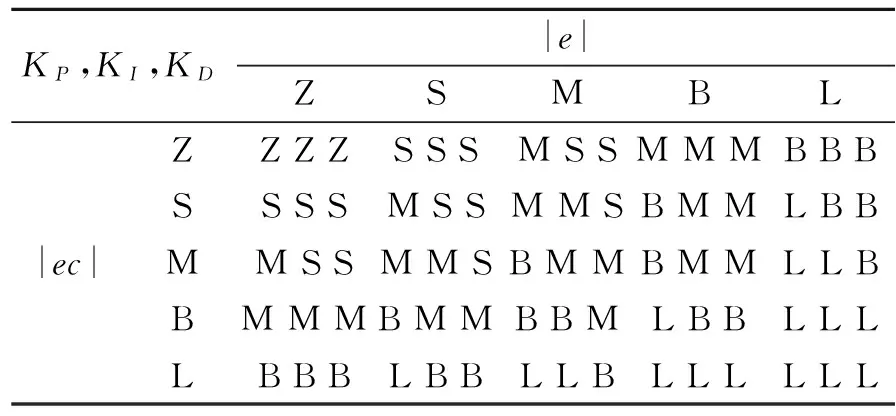
表1 模糊逻辑控制规则
笔者针对微位移主动隔振系统特点,将模糊控制器语言变量值[13-14]分为5档,依次为Z,S,M,B和L,分别代表零、小、中、大和特大,用来制定Kp,KI,KD系数的模糊规则。为了便于判定,取反馈误差e(t)和误差变化ec(t)的绝对值作为输入。e(t),ec(t),KP,KI和KD的隶属度函数分别如图5,6所示。采用最大隶属度法对控制器输出进行模糊判决,选取输出变量模糊子集中隶属度最大的论域元素作为判决结果。图7分别为比例、积分和微分系数KP,KI和KD在论域上的输出曲面。
2.3 主动隔振控制系统程序开发
笔者提出的微位移主动隔振控制系统是在NILabVIEW环境下开发的[15]。微位移主动隔振控制系统程序主要分成数据采集和记录、作动器标定和过载保护、报表生成、加速度频域积分、Fuzzy-PID控制算法以及振动信号离线频谱分析6个模块。先分别开发出以上6个程序模块,再将这些程序封装为微位移主动隔振控制系统总程序,并设计如图8所示的操作界面。
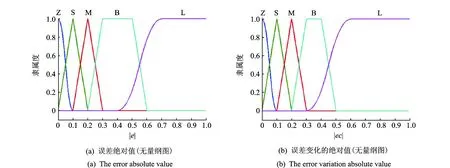
图5 误差绝对值和误差变化的绝对值的模糊子集隶属度曲线Fig.5 The relationship between the fuzzy subset and the absolute value of error & error variation
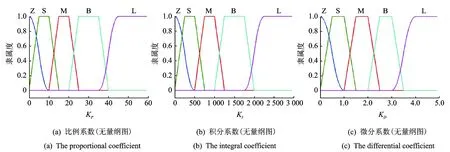
图6 比例、积分、微分系数的模糊子集隶属度曲线Fig.6 The relationship between the fuzzy subset and the proportional, integral and differential coefficients
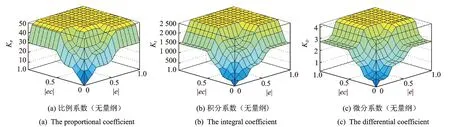
图7 比例、积分和微分系数在论域上的输出曲面Fig.7 The output surface of proportional, integral and differential coefficients on domain
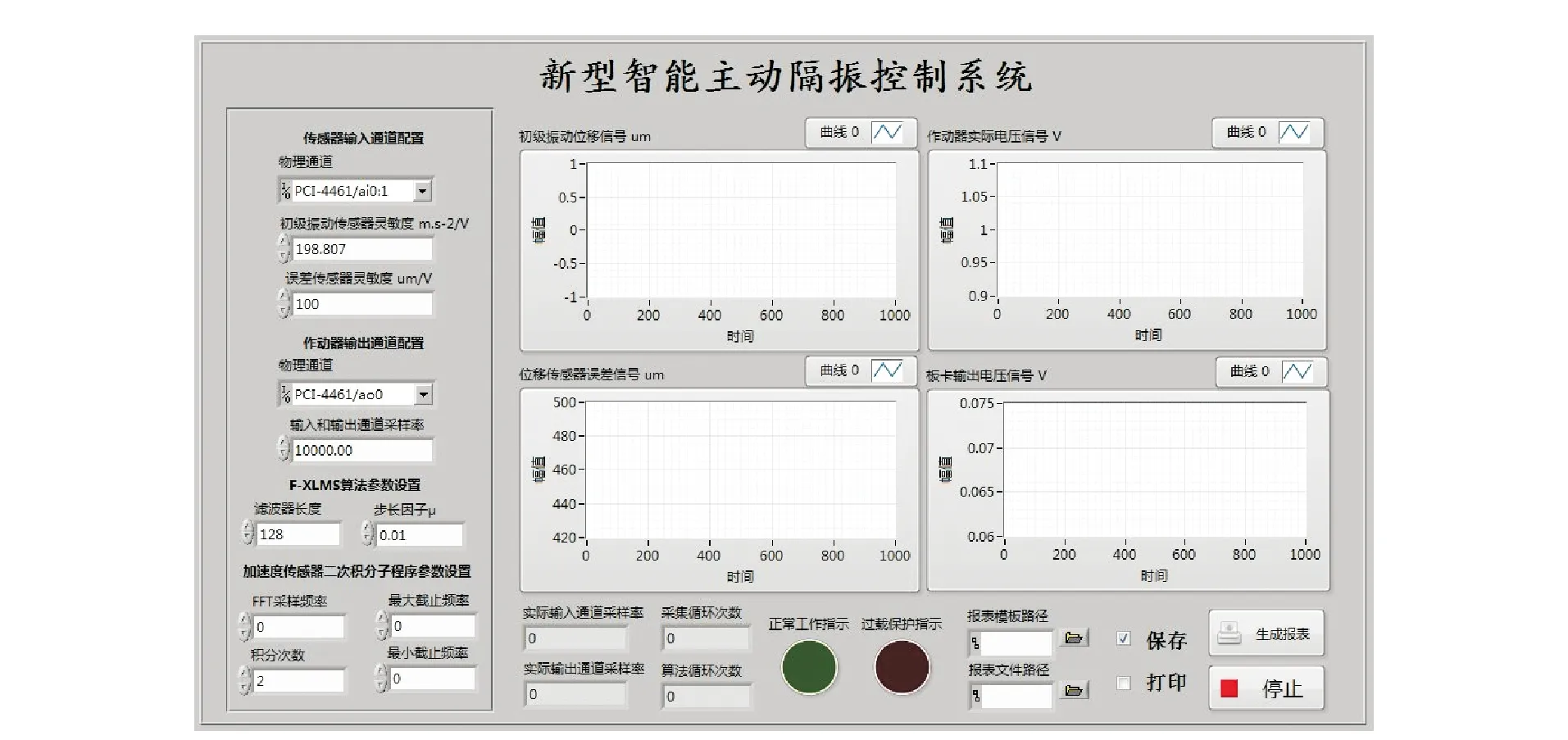
图8 微位移主动隔振控制系统操作界面Fig.8 The user operation interface of this new smart micro-displacement active vibration isolation system
3 微位移主动隔振控制实验平台
按照需要实现的功能,将微位移主动隔振控制系统硬件划分为激振器振源、作动器反向振动和传感检测3个部分。
3.1 激振器振源
激振器振源部分的作用是激励基体产生不同频率和幅值的振动,为控制系统提供初级振动信号。这部分主要由激振器、放大器和数据采集等组成。
3.2 作动器反向振动
作动器反向振动的功能是产生与基体信号反相的振动,以抵消振源振动的位移,达到主动振动隔离的目的。这部分主要由压电陶瓷作动器和驱动电源组成。
3.3 传感检测
传感检测部分包含振源传感器、误差传感器和数据采集与显示。其中:传感器用于采集振动基体的振动和受控后的振动位移,为控制算法提供初始数据;数据采集与显示的功能主要是读取振动模拟信号并转换为数字信号,同时将控制算法获得的控制电压转换为模拟信号并输出。数据采集与显示主要由BK4524-B-004加速度传感器、电涡流位移传感器和NIPXI数据采集系统等组成。其精度指标和误差水平具体参照公司的产品说明或文献[16]。叠层式压电作动器的主要参数:标称位移为60μm;标称控制电压为0~150V;静电电容为2.6μF;最大输出力为1 000N;驱动位移精度为1~2μm。
3.4 总体硬件平台搭建
连接以上3部分仪器,组成图9所示的微位移主动隔振控制系统。

图9 微位移主动隔振控制系统实验平台Fig.9 The experiment platform of micro-displacement active vibration isolation control system
4 微位移主动隔振控制系统实验
使用Fuzzy-PID控制算法进行微位移主动隔振实验研究。激振器采用80Hz正弦、60~180Hz扫频(频率增长速度为120Hz/s)、60~260Hz随机3种典型激励信号。数据采集系统由2个输入通道和1个输出通道组成,每个通道的采样率均为每秒2 000次,测得的振动位移以NITDMS格式记录。3种激励下的各项实验数据如图10~12所示。
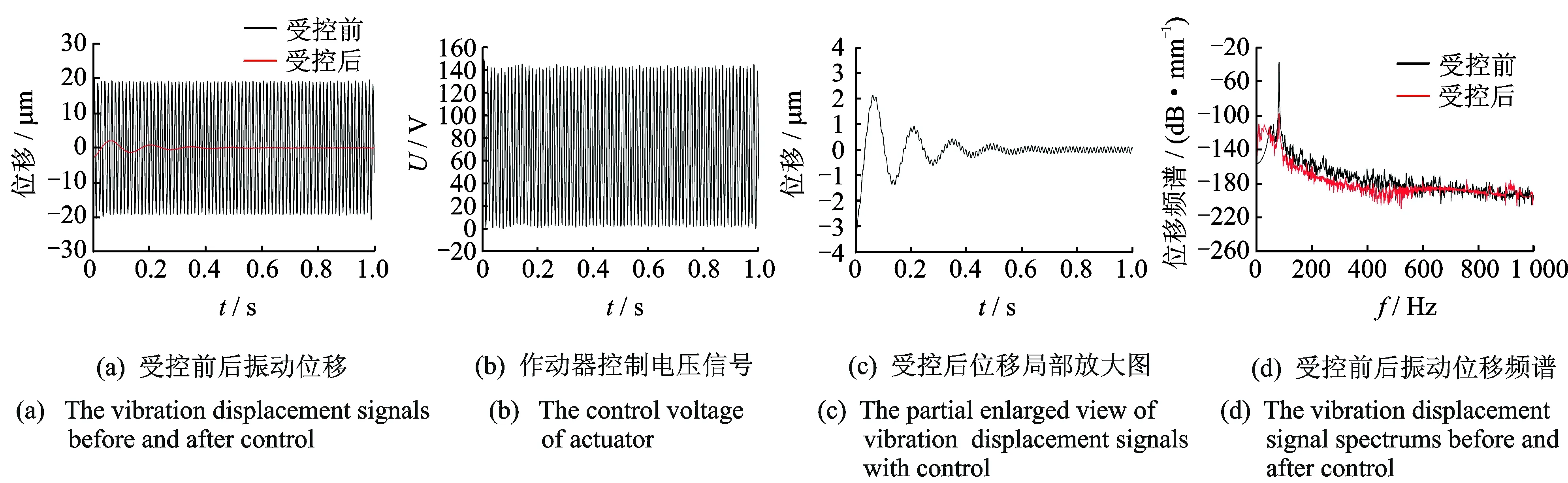
图10 80 Hz正弦激励控制前后实验数据Fig.10 The experiment results with and without control under 80Hz sine excitation signal
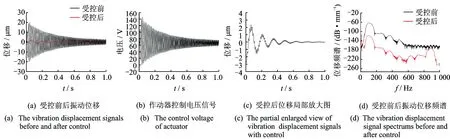
图11 60~180 Hz扫频激励控制前后实验数据Fig.11 The experiment results with and without control under 60~180Hz sweep frequency vibration excitation signal
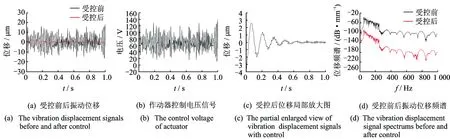
图12 60~260 Hz随机激励控制前后实验数据Fig.12 The experiment results before and after control under 60~260Hz random vibration excitation signal
当激励信号为80Hz单频正弦时,如图10(a)~10(c)所示。受控后的振动位移曲线在0.5s前快速衰减,在0.5s后趋于稳定,但稳定后位移仍在小范围内波动,位移衰减至1μm范围所用时间为0.15s。由图10(d)可知,频谱图受控前80Hz正弦振动位移信号为-37dB,受控后衰减为-92dB,振动位移下降了55dB。
当激励信号为60~180Hz恒加速度扫频时,如图11(a)~11(c)所示。受控前振动位移随着频率的增大而逐渐降低,受控后振动位移曲线在0.6s前迅速衰减,在0.6s后趋于稳定,稳定后位移在小范围内波动,位移降低至1μm所用时间约为0.20s。由图11(d)可知,频谱图受控前振动位移信号峰值为-60dB,受控后衰减为-118dB,振动位移下降了约58dB。
当激励信号为60~260Hz随机时,如图12(a)~12(c)所示。受控后振动位移曲线比受控前有明显的降低,受控后的振动位移曲线在0.7s前迅速衰减,在0.7s后变化不明显,稳定后位移也在小范围内波动,位移降低至1μm内所用时间约为0.26s。由图12(d)可知,频谱图受控后位移信号峰值下降约52dB。
综合以上实验结果可知,不论何种激励信号,受控后的振动曲线在初始阶段都存在一个震荡过程,达到稳定后,振动曲线在横轴附近作小范围振动。造成这种现象的主要原因是由于在数据采集系统和传感器电路中都会存在一定的背景噪声,同时传感器测量和加速度积分及作动器驱动电源输出电压也有一定误差,而仪器线路磁场、实验室供电系统波动、压电材料的迟滞现象、地基和工作台的振动等都会影响受控后的位移响应。
5 结束语
为了解决精密仪器设备的微位移隔振问题,开发了一种以多层压电陶瓷为作动器的智能压电主动隔振系统。使用LabVIEW开发环境完成了该控制系统的Fuzzy-PID控制算法程序,在现有数据采集系统和激振系统基础上搭建了控制系统的实验平台。通过实验验证了该系统对微位移主动隔振的有效性,为精密仪器和微纳米设备的微位移智能主动隔振奠定了基础。
致谢:NI公司刘力帆工程师对本实验的支持。
[1] 崔铮.微纳米加工技术及其应用综述[J]. 物理, 2006(1): 34-39.
Cui Zheng. Overview of micro/nanofabrication technologies and applications[J]. Physics, 2006(1): 34-39.(in Chinese)
[2] Wang Qingmin, Yang Yaoen, Su Mubiao, et al. Research on application of micro-nano acceleration sensor in monitoring the vibration state of vehicles[J]. Procedia Engineering, 2012, 29: 1213-1217.
[3] 杨玥, 郑素霞, 许忠斌. 微纳米技术在工业装备中的应用研究进展[J]. 轻工机械, 2011(4): 117-120.
Yang Yue, Zheng Suxia, Xu Zhongbin. Application development of the micro-and nano-technology in industrial equipment[J]. Light Industry Machinery, 2011(4): 117-120. (in Chinese)
[4] Daniel Granger, Annie Ross. Effects of partial constrained viscoelastic layer damping parameters on the initial transient response of impacted cantilever beams: experimental and numerical results[J]. Journal of Sound and Vibration, 2009, 321(1): 45-64.
[5] 梁森, 梁磊, 米鹏. 嵌入式共固化复合材料阻尼结构的新进展[J]. 应用力学学报, 2010, 27(4): 767-772.
Liang Sen, Liang Lei, Mi Peng. New development of the embedded and co-cured composite damping structures[J]. Chinese Journal of Applied Mechanics, 2010, 27 (4): 767-772. (in Chinese)
[6] 王辉, 梁森, 王常松. 嵌入式共固化穿孔阻尼层复合材料结构动力学性能研究[J]. 复合材料学报, 2014, 31(1): 185-191.
Wang Hui, Liang Sen, Wang Changsong. Dynamic property analysis of the embedded co-cured perforated damping layer composite structure[J]. Acta Materiae Compositae Sinica, 2014, 31(1):185-191.(in Chinese)
[7] 李雨时, 周军, 钟鸣, 等. 基于压电堆与橡胶的主被动一体化隔振器研究[J]. 振动、测试与诊断, 2013(4): 571-577.
Li Yushi, Zhou Jun, Zhong Ming, et al. Active and passive integration of vibration isolator based on piezoelectric-rubber[J]. Journal of Vibration, Measurement & Diagnosis, 2013(4): 571-577.(in Chinese)
[8] 张培军, 何琳, 帅长庚, 等. 主动隔振系统解耦控制算法仿真与试验研究[J]. 振动与冲击, 2013, 19(32):192-196.
Zhang Peijun, He Lin, Shuai Changgen, et al. Simulation and test for a decoupled control algorithm used in an active vibration isolation system[J]. Journal of Vibration and Shoch, 2013, 19(32):192-196.(in Chinese)
[9] 卜昭辉. 压电式隔振系统的主动及半主动控制研究[D]. 大连: 大连理工大学, 2013.
[10]周振华.精密隔振系统的扰动抑制与补偿研究[D]. 武汉:华中科技大学, 2013.
[11]梁森, 王常松. 振动板梁结构的发电及被动控制系统: 中国,ZL201320305980.7[P]. 2013-12-11.
[12]王威, 杨平. 智能PID控制方法的研究现状及应用展望[J]. 自动化仪表, 2008, 29(10):1-3.
Wang Wei, Yang Ping. Intelligent PID control of the status and the application of prospect[J]. Process Automation Instrumentation, 2008, 29(10):1-3. (in Chinese)
[13]章卫国, 杨向忠. 模糊控制理论与应用[M]. 西安: 西北工业大学出版社, 2004:56-89.
[14]王威, 薛彦冰, 宋玉玲, 等. 基于GA优化控制规则的汽车主动悬架模糊PID控制[J]. 振动与冲击, 2012, 22: 157-162.
Wang Wei, Xue Yanbing, Song Yuling, et al. Fuzzy-PID control strategy for an active suspension based on optimal control laws with genetic algorithm[J]. Journal of Vibration and Shock, 2012, 22: 157-162.(in Chinese)
[15]陈树学, 刘萱. LabVIEW宝典[M]. 北京:电子工业出版社, 2011:75-128.
[16]王常松. 新型智能微位移主动隔振控制系统的研发[D].青岛:青岛理工大学, 2014.

10.16450/j.cnki.issn.1004-6801.2017.01.006
*国家自然科学基金资助项目(51375248;11202198)
2015-01-17;
2015-04-20
TH113.1
梁森,男,1962年9月生,教授、博士生导师。主要研究方向为振动噪声与控制。曾发表《The natural vibration of a symmetric cross-ply laminated composite conical-plate shell》(《Composite Structures》2007, Vol.80, No.2)等论文。
E-mail: liangsen888111@163.com
