一种适用于直流微电网的自主式控制策略研究
2017-03-14侯朋飞王金全李建科
侯朋飞,王金全,徐 晔,李建科,严 鋆
(解放军理工大学,江苏省南京市 210007)
一种适用于直流微电网的自主式控制策略研究
侯朋飞,王金全,徐 晔,李建科,严 鋆
(解放军理工大学,江苏省南京市 210007)
本文对无通信总线的直流微网自主式控制系统进行研究,提出了直流微网自主式控制系统工作模式的设计方法,各微源利用母线电压作为信息传播的载体,基于直流母线电压的波动来实现各种工作模式的自主切换。结合算例仿真对一个典型的直流微网系统进行研究,验证了所提方法的有效性。
直流微电网 自主式 控制 工作模式
0 引言
随着光伏、燃料电池、储能装置等具有直流输出特性的微源在微网系统中大规模应用,与交流母线系统相比,采用直流母线的系统使用的电力电子开关器件少,能量转换效率更高。而且直流系统中不存在电压频率和无功功率的概念,因此更容易控制[1]。采用自主式控制方法的直流微电网系统不需要额外的通信总线,可以降低系统成本,提高系统的可靠性和灵活性。
微网是一种可以有效整合可再生能源的小型电力系统。按照母线类型分,微网具有直流和交流两种形式。直流微网与交流微网相比具有控制简单、电能转换效率高、造价较低等优势,是未来智能电网一种可能的发展方向。微网系统中采用了大量的可再生能源和储能单元,这种特点使得微网的能量管理问题变得突出[2]。一方面,如何保证直流微网系统的可靠运行是一个函待解决的关键问题;另一方面,可再生能源和储能单元价格昂贵,应对直流微网系统的工作状态进行优化,保证直流微网系统运行在经济性较优的模式中。本文对无通信总线的直流微网的自主式控制系统进行研究,研究了无通信总线的直流微网自主式控制的工作模式及设计方法,使其既能实现微网可靠运行,又能保证微网优先工作在经济性较优的模式中。
在进行直流微电网自主式控制系统设计时,首要的控制目标是微网系统的稳定运行[3]。这里所说的“稳定运行”,包括稳态稳定性和动态稳定性。稳态稳定性是指在系统稳态情况下,实现发电与负荷的功率平衡,使直流母线电压维持在一个可接受的范围内;动态稳定性是指发电或负荷发生突变时,系统具有动态稳定性。通常情况下,可实现微网稳定运行的控制策略并不是唯一的。在此基础之上,进一步的控制目标是实现微网系统的经济运行。通过对微网中各微源进行优化调度,设计合理的工作模式,使直流微网系统运行在一种经济性较优的模式中[4]。
2 直流微电网的自主式控制方法
按照功率流的方向来分,微网系统中的微源可分为三类:
1)只能向直流母线输出功率的单元,即发电单元,包括光伏、风电以及柴油发电机等;
2)具有双向功率流的单元,即储能单元,包括蓄电池、飞轮、并网变流器等;
3)只能从直流母线吸收功率的单元,即负荷。
对于发电单元和储能单元的控制称为“供电侧控制”,对于负荷的控制称为“需求侧控制”。要实现发电与负荷的功率平衡,就是要控制系统中多种发电单元和储能单元协调工作。通常,光伏、风电等可再生发电方式和负荷都被认为是“不可控”的,储能单元是“可控的”。常见的风光储系统,就是通过控制储能单元输出功率或吸收功率,来平衡发电单元和负荷的之间的功率差[5]。
但上述“不可控”和“可控”的说法并不严谨,微源的“可控性”取决于微源的控制方式及控制指令的大小。实际上,直流微电网系统中的所有微源的功率都具有一个可控范围:

其中 Pout表示微源的实际功率,Pmin表示微源的最小功率,Pmax表示微源的最大功率。当微源的功率指令 Pref处于微源功率的可控范围内,微源功率可以按照指令输出;当微源的功率指令 Pref处于功率的可控范围之外,则微源输出饱和,不能跟踪指令。即:
定义微源向母线输出功率为正方向,则发电单元Pmin=0,Pmax>0;储能单元的Pmin<0,Pmax>0;负荷单元的Pmin=0,Pmax<0。需要注意的是,Pmin和Pmax并不一定是常值。例如光伏Pmax的含义是MPPT控制下光伏的发电功率,它受到包括光照条件、温度等环境因素的影响,随着环境的变化而变化;又如蓄电池的Pmin和Pmax与蓄电池的剩余容量、老化特性等诸多因素有关。
要实现直流微电网系统的稳定运行,即通过控制发电单元和储能单元的功率来满足负荷需求,即:

通过上述分析可知,稳态下直流微电网系统功率平衡的条件是:

如果各微源功率满足上式,说明直流微电网系统具备稳定运行的条件,即发电单元和储能单元具有满足负荷单元功率需求的能力。在此基础上,应该考虑多个微源的调度问题。
考虑到负荷的随机波动性,当负荷较小的时候,直流微电网系统中只需要若干微源工作即可,其余微源可以处于关闭状态;当负荷增大时,关闭的微源启动投入到工作中。此外,直流微网系统还应该既可以并网运行,又可以在电网发生故障时脱网工作在孤岛模式。因此,直流微网系统应该具有若干种工作模式,并且可以根据负荷的波动在这几种工作模式中自主切换[6]。在所有工作模式中,我们都只选择一个微源工作在电压源状态,用于控制直流母线电压。其余微源均工作在电流源状态进行功率输出或者处于关闭状态。这样做的原因是:1)为了维持直流母线电压稳定,系统中至少需要一个微源工作在电压源状态,用来平衡发电和负荷的功率差;2)如果系统中只有一个微源处于电压源状态的话,更容易控制直流母线电压的稳定。这个特点也可以保证系统的稳定性。
本文研究的直流微网系统中不包含通信总线,但对多个微源进行调度又必须有信息交互,因此只能利用各微源端口处可以测量到的信号量作为信息传播的载体,即基于直流母线电压来实现直流微网系统的自主式控制。
直流母线电压具有以下两个特点:
1)忽略线路阻抗的条件下,直流微网系统中各微源测量到的直流母线电压相等;
2)直流母线电压可以直接反映直流微网系统中发电功率与负荷功率的关系。如果发电功率超过负荷功率,直流母线电压就会上升;如果发电功率小于负荷功率,直流母线电压就会下降。
一个自然的思路就是把直流微网系统中各微源的出力情况与直流母线电压对应起来。从单个微源的角度看,直流母线电压上升,说明发电单元出力过大,应该减少出力;直流母线下降,说明发电单元出力不足,应该增加出力。从包括多个微源的系统的角度看,可以给系统中各发电单元设定一个优先级,负荷较小时,优先级较高的发电单元投入工作即可满足负荷需求,此时优先级较低的发电单元不工作;当负荷增大后,再投入优先级较低的发电单元。
3 控制器设计
3.1 并网变流器控制器设计
并网变流器在两相同步旋转坐标系的表达式如下:
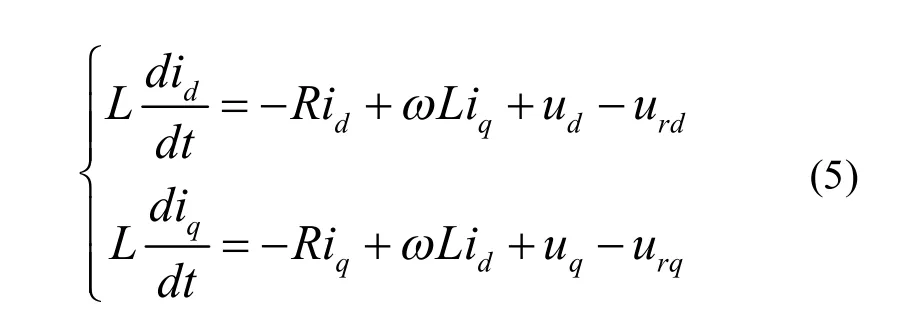
式中ud、uq分别是电网电压进行旋转变换后的dq轴分量。id、iq分别是电网电流进行旋转变换后的dq轴分量,LR分别是并网电感和并网电阻,rd、urq是变流器交流侧输出电压。
从式(5)中可以看出,引入电流反馈ωLiq,-ωLid可以实现dq轴解耦。在此基础上,为进一步提高系统的动态性能,同时克服电网电压波动带来的系统扰动,可以引入电网电压ud、uq前馈补偿,独立控制dq轴电流。
在直流微网系统中,并网变流器与电网只有有功功率的交换,没有无功功率的交换,所以iq=0。为维持直流母线电压稳定,可采用电压反馈作为外环加电流反馈作为内环的串级控制结构,用电压调节器的输出作为d轴电流的给定值,直接反映了并网变流器和电网的有功功率交换。
并网变流器的控制结构如图 1所示,Vdc、Vdc_ref分别为直流母线电压和直流母线电压的参考电压,Usα、Usβ分别是两相旋转坐标系中电网电压的αβ分量,D*为控制器输出的PWM控制信号。并网变流器采用了双闭环控制,其中,内环为电流环,电流环需要快速跟随电压环输出的电流指令,获取高性能的电流动态响应,提高系统的动态性能;外环为电压环,电压环主要用于消除母线电压误差,提高系统的静态性能。
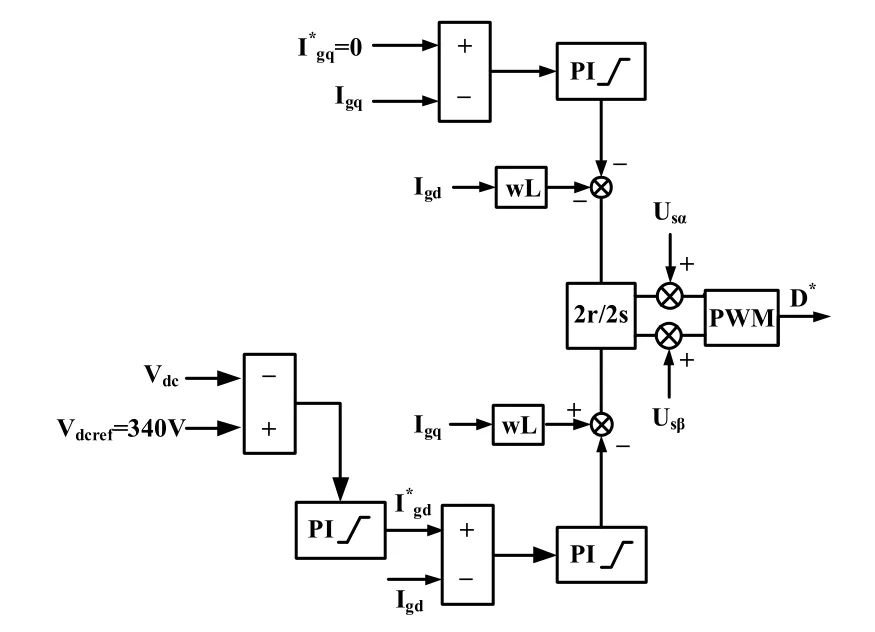
图1 并网变流器控制框图
3.2 光伏发电单元变换器控制设计
光伏单元有两种工作模式:MPPT模式和恒电压控制模式,控制框图如图2所示。其中,Vdc是检测到实际的直流母线电压,Vdcref=370 V是模式II的参考电压。恒电压控制利用电压闭环,控制直流母线 Vdc稳定到参考电压 Vdcref。Vpv、Ipv分别为光伏模块的输出电压和输出电流,经MPPT控制算法计算出当前外界条件下的最大功率点电压VMPPT作为光伏模块的参考电压,与Vpv做差后进行PI闭环,实现MPPT控制。
光伏发电单元MPPT控制与恒压控制切换的标准是恒压控制器是否正饱和,当恒压控制器输出正饱和时,光伏发电单元工作在 MPPT模式;否则光伏发电单元工作在恒压控制模式。系统工作在Mode I,Mode III,Mode IV时,母线电压分别为360 V、350 V、340 V,此时恒压控制器输出正饱和,光伏发电单元工作于MPPT模式。
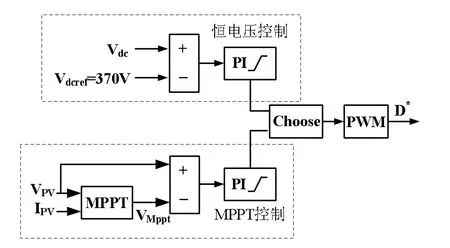
图2 光伏单元控制框图
当系统工作Mode III或Mode IV时,光伏发电单元工作在MPPT模式;负载减小时,母线电压上升,当电压上升至370 V,光伏单元的恒压控制器开始退饱和,由MPPT控制模式转入恒压控制模式。
3.3 蓄电池单元变换器控制设计
蓄电池单元的双向 DC/DC变换器控制结构如图3所示,采用双环控制结构,外环为母线电压闭环,内环为电池电流闭环。其中,Vdc是实际检测到的直流母线电压,Vdc_ref=350 V是模式III的直流母线电压参考值。经过电压外环计算得到电流内环的参考电流值I*bat,与实际检测到的电池电流Ibat。做差后进行PI控制,得到占空比D*[7]。
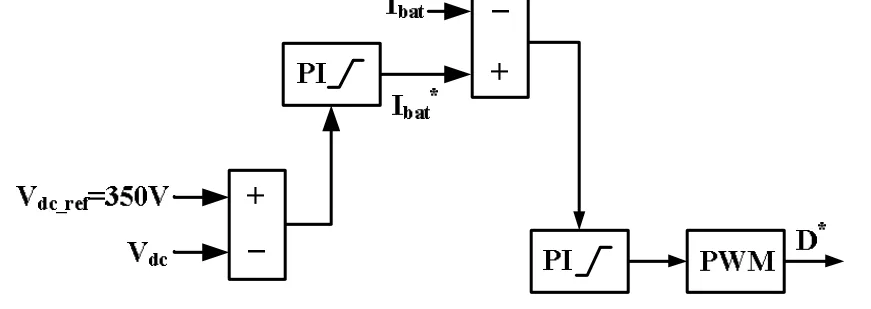
图3 蓄电池单元控制框图
4 工作模式设计
4.1 参数说明
系统中的微源有4类,因此对应于4种工作模式,见表2。在4种工作模式中,从环保的角度出发选择“最大化利用可再生能源”和“最小化利用非可再生能源”,从降低财务成本的角度出发选择“为延长电池寿命,要尽量少用电池”。综合考虑这些因素后,4种工作模式为模式 I(并网状态,并网变流器做电压源,直流母线电压360 V),模式II(孤岛状态,系统轻载,光伏单元做电压源,直流母线电压370 V),模式III(孤岛状态,系统中度负载,电池做电压源,直流母线电压350V),模式 IV(孤岛状态,系统重载,柴油发电机单元做电压源,直流母线电压340 V)。工作模式的优先级为模式II>模式I>模式III>模式IV。
4.2 不同微源电压闭值间隔的选择
本文所述的自主式控制方法是基于直流母线电压波动实现的。从提高负荷用电质量的角度考虑,不同微源的工作电压阈值相差应该尽量小,这样直流母线电压波动的幅度比较小。但从控制效果的角度考虑,不同微源工作电压阈值应该尽量大。采用具有通信总线的集中式控制方法的话,中央控制器和各个微源通信可以进行精确的调度。但在自主式控制方法中,两个具有相同工作电压阈值的微源,可能并不能同时投入工作,原因是直流母线上的线路阻抗可能导致不同微源测量到的直流母线电压并不一致,同时,测量电压的过程也会有一定的测量误差。当直流母线的线路阻抗较小的时候,这个问题并不显著;但当直流母线的线路阻抗较大时,这个问题不能忽略。由于不同微源测量到的母线电压不同,可能导致系统工作在设计好的工作模式以外的状态中,例如有多个微源工作在电压源状态,但这对系统的稳定性并无影响。因此,微源工作电压阈值的设定应该结合实际系统的情况。
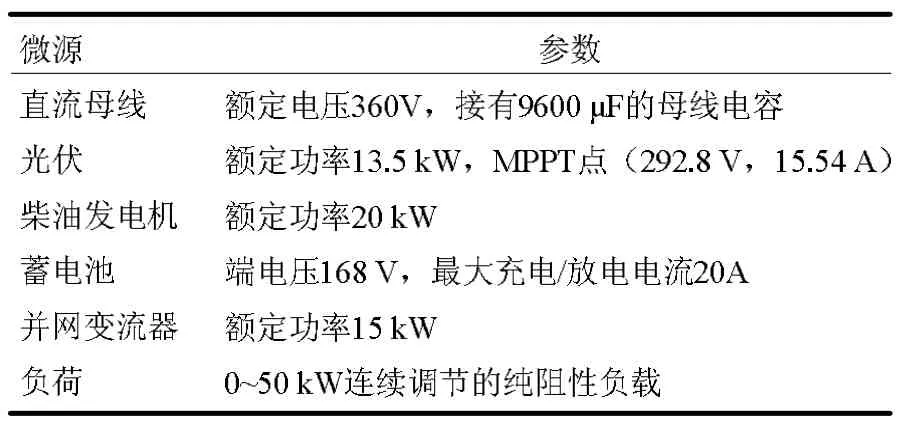
表1 算例的系统参数
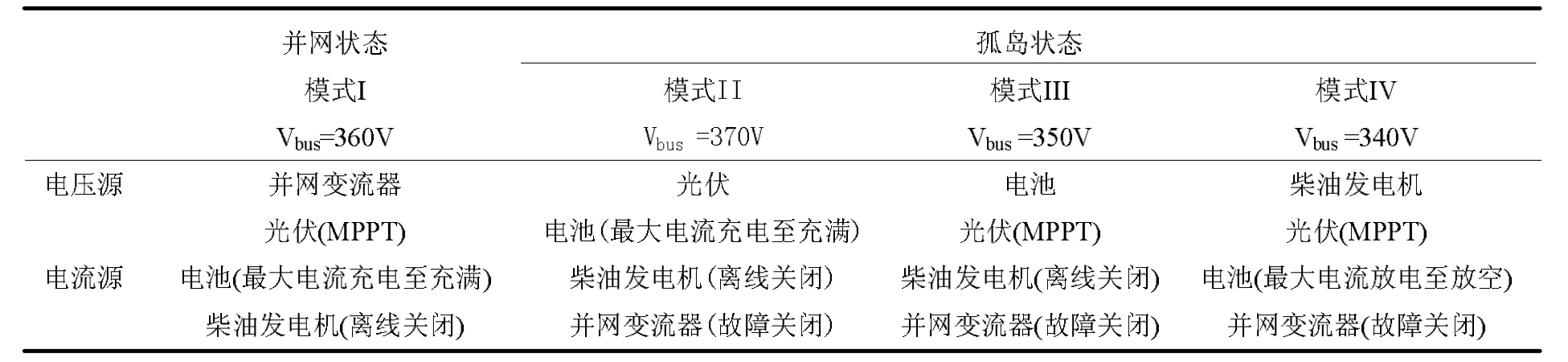
表2 算例的工作模式
4.3 单电压源模式与多电压源模式
直流微网系统具有多种工作模式。但是稳态情况下,每种工作模式中有且只有一个微源工作在电压源模式,但是系统中有多个微源工作在电压源模式并不会影响系统的稳定性。如果有多个光伏单元,可以对不同光伏单元划分优先级;也可使这些光伏单元在360 V至370 V的范围内进行下垂控制。两种控制方式都可以保证系统的稳定性,只是功率分配方式不同:前者优先使用优先级高的光伏发电,当优先级高的光伏达到MPPT状态时才启用优先级较低的光伏单元;后者是把负荷平均分配到各光伏单元。因此,对于微源个数较多的直流微网系统,设计工作模式时可先按照属性对微源进行分类,每种工作模式中有且只有一类微源工作在电压源模式。
5 仿真实验与分析
在 MATLAB/Simulink中建立了光伏单元、柴油发电机组、蓄电池、并网变流器和负荷的模型,仿真模型为离散状态,采用ode4(Runge-Kutta)求解器,仿真步长为1×10-5s。算例有4种工作模式,随着负载和环境的变化,任意两种工作模式都有可能发生切换,如图4所示。
需要说明的是,并网变流器和电池的功率流是双向的,所以作为电压源工作时,并网变流器和电池的状态各有两种。在模式I中,并网变流器可能工作在逆变状态(对应模式称为I_inv)或整流状态(对应模式称为 I_rec);在模式 III中,电池可能工作在充电状态(对应模式称为 III_cha)或放电状态(对应模式称为III_dis )。本文选取了4个具有代表性的模式切换案例进行分析,这4个案例分别对应于图4所示的4种工作模式切换过程。
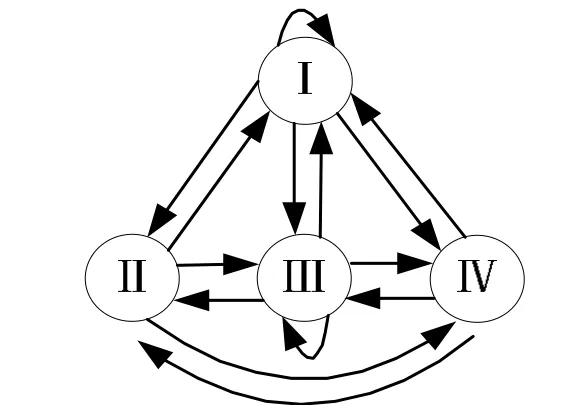
图4 系统工作模式转移图
算例1:模式I_ inv至模式II
仿真结果如图5所示,初始系统处于模式I,光伏发电单元均工作在MPPT控制模式,电池以最大电流恒流充电,系统负载较轻,并网变换器工作在逆变模式保证系统功率平衡,直流母线电压稳定在360 V。在1 s时,电网发生故障,并网变换器停止工作,此时光伏单元发电功率大于负载需求,直流母线电压上升,光伏单元由 MPPT模式切换到恒压控制模式,使母线电压稳定在370 V,此时系统切换至模式II。整个过程中,柴油机不需要投入工作。
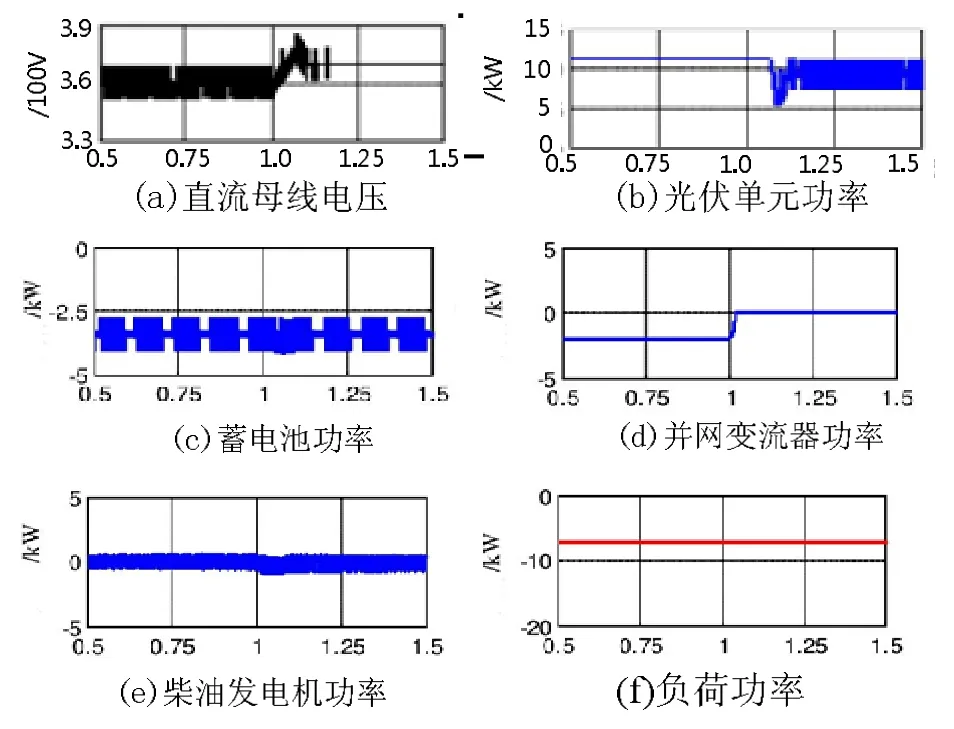
图5 模式I_ inv至模式II仿真结果
算例2:模式III_dis至模式IV
仿真结果如图6所示,系统工作在孤岛模式,初始时负载较重,电池作为电压源工作,放电以实现系统功率平衡,直流母线电压稳定在350 V。在1秒时,负载增加,电池放电电流增加到最大值后,直流母线电压开始下降。降至340 V时,柴油机投入工作,作为电压源控制直流母线电压稳定在340 V。
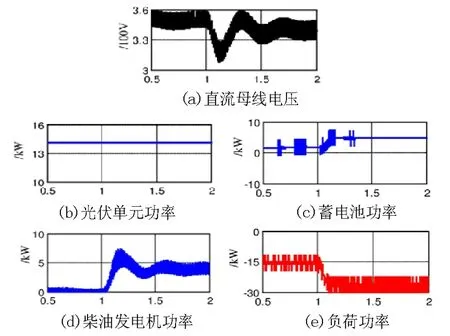
图6 模式III_dis至模式IV仿真结果
算例3:模式II至模式IV
仿真结果如图7所示,初始时系统处于模式II,光伏单元作为电压源平衡系统功率,母线电压稳定在370 V。在1 s时,负载增加,光伏单元达到MPPT点,直流母线电压降低,电池以最大电流放电,仍未满足负载需求,直流母线电压继续下降至340 V,柴油机投入工作,直流母线电压稳定在340 V。
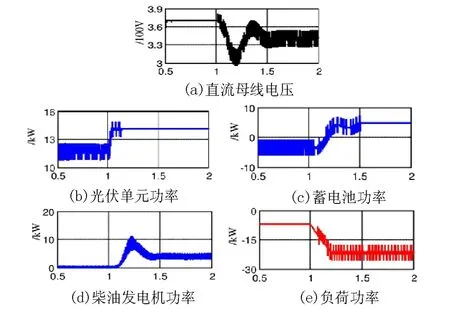
图7 模式II至模式IV仿真结果
算例4:模式IV至模式I_rec
仿真结果如图8所示,初始时系统处于模式IV,柴油发电机作为电压源,控制直流母线电压在340 V。光伏单元工作在MPPT状态,电池以最大电流放电。在1 s时,电网从故障中恢复,并网变流器开始工作在整流状态,柴油机停止工作,电池由放电转为最大电流充电,直流母线电压上升至 360 V。这个过程中,光伏单元保持MPPT状态。
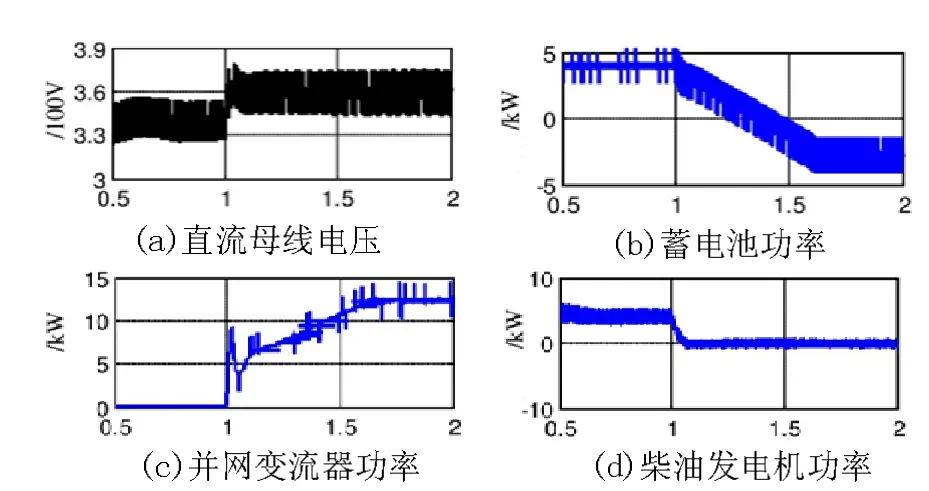
图8 模式IV至模式I_rec仿真结果
6 结论
直流微电网中母线电压可以直接反映系统中发电功率与负荷功率的关系,在忽略线路阻抗的条件下,系统中各微源测量到的母线电压相等。因此,在微网中不存在通信总线的限制下,各微源利用母线电压作为信息传播的载体,基于直流母线电压的波动来实现各种工作模式的自主切换。本文对直流微网系统中的各类分布式单元进行分类,基于控制目标研究并改进了无通信总线的直流微网系统在自主式控制下的工作模式及设计方法。每个模式指定一类分布式单元工作在电压源模式,其余分布式单元均工作在电流源模式,以保证微网系统具有较好的稳定性。根据特定的经济指标对不同的子模式设定优先级,令微网优先工作在经济性较好的模式中,以保证微网系统具有较好的经济性。通过仿真结果与分析,验证了本文所提的直流微网自主式控制系统的工作模式设计方法的可行性,指出在单元动特性己知的条件下,本文方法具有良好的稳定性和参数鲁棒性。
[1] R. H. Lasseter, P. Paigi. Microgrid: A conceptual solution. Power Electronics Specialists Conference, IEEE 35th Annual, pp. 4285-4290, June 2004.
[2] J. Roscoe, S. J. Finney, and G. M. Burt. Tradeoffs between ac power quality and dc bus ripple for 3-phase 3-wire inverter-connected devices within microgrids. IEEE Transaction on Power Electronics, vol.26, pp. 674-688, Mar. 2011.
[3] E. Barklund, N. Pogaku, and M. Prodanovic. Energy management in autonomous microgrid using stability-constrained droop control of inverters. IEEE Transaction on Power Electronics, vol.23, pp. 2346-2352, Sept. 2008.
[4] T. Patterson. DC come home: DC microgrids and the birth of the enernet. IEEE Power Energy Magazine, vol.10, pp.60-69, Nov. 2012.
[5] J. Wei, B. Fahimi. Active current sharing and source management in fuel cell-battery hybrid power system. IEEE Transaction on Industrial Electronics, vol. 57, pp. 752-761, Feb. 2010.
[6] B. Fardanesh. Future trends in power system control. IEEE Computer Applications in Power, vol. 5 pp. 24-31, July 2002.
[7] S. K. Mazumder, M. Tahir, and S. L. Kamisetty, Wireless PWM control of a parallel dc–dc buck converter. IEEE Transaction on Power Electronics, vol. 20, pp. 1280-1286. Nov. 2005.
Adaptive Control Strategy for DC Microgrid
Hou Pengfei, Wang Jinquan, Xu Ye, Li Jianke, Yan Jun
(PLA University of Science & Technology, Nanjing 210007, China)
This paper studies the key control of the autonomous control system without communication bus. In this paper, we study and improve the DC microgrid autonomous control system design method, the bus voltage is used as the carrier of information transmission to realize the automatic switching of various operating modes based on the fluctuation of the DC bus voltage. The simulation of a typical DC microgrid system is carried out to verify the effectiveness of the proposed method.
DC microgrid; autonomous; control; working mode
TM727
A
1003-4862(2017)02-0005-06
2016-09-06
国家自然青年科学基金项目 (51507188)
侯朋飞(1989-),男,博士研究生。研究方向:电力系统自动化。E-mail: 19890224hpf@163.com