基于降阶模型的水下结构振动主动控制仿真及实验研究
2017-03-09于丹竹
于丹竹, 黎 胜
(大连理工大学 工业装备结构分析国家重点实验室,运载工程与力学学部 船舶工程学院,大连 116024)
基于降阶模型的水下结构振动主动控制仿真及实验研究
于丹竹, 黎 胜
(大连理工大学 工业装备结构分析国家重点实验室,运载工程与力学学部 船舶工程学院,大连 116024)
基于降阶模型对水下结构振动的主动控制进行了仿真及实验研究,并取得了较好的抑制振动的效果。基于结构在可压缩流体加载下的无阻尼实模态矩阵建立了水下结构的降阶模型,由于维数的降低,进而能够设计出相对简化的主动控制系统,减少传感器和作动器的数量。通过线性二次型最优控制和结构主动变刚度控制两种方法对水下结构振动进行了主动控制仿真,均使结构振动有所下降。仿真结果显示线性二次型最优控制能够降低结构振动的峰值,而结构主动变刚度控制能够将结构的固有频率按照需要进行改变。还通过水下平板振动主动控制模型实验,验证了主动控制技术对水下结构的减振效果。
水下结构;降阶模型;振动主动控制;线性二次型最优控制;变刚度控制;实验研究
船舶结构振动对船舶的安全性,仪器仪表的工作稳定性以及人员的舒适性等都有非常大的影响。由结构振动引起的船舶水下辐射噪声,对海洋生物和环境有不利影响,也降低了舰艇的隐蔽性。水下结构的振动控制一直以来都是船舶工程领域亟需着力解决的问题之一。目前船舶工程领域所广泛采用的减振方法,通常是采用被动控制手段:如浮筏基座隔振技术、敷设阻尼材料降低振动、以及增大船体结构刚度等[1]。这类技术通常在低频段很难获得令人满意的振动控制效果。
结构振动主动控制方法与传统的被动控制方法相比,具有抑制低频效果好,对被控结构的物理性质影响小,修正设计方便,以及能够适应未知扰动,能适应系统和结构参数的不确定性等诸多优点,已经被广泛应用于航天工程和汽车工程领域,以空气或真空中结构为研究对象。20世纪90年代FULLER[2],顾仲权等[3]较全面地介绍了振动主动控制的理论、方法及应用。近年来,振动主动控制技术的研究也取得了不少进展。ZILLETTI等[4]对平板实施了多个速度反馈循环的实验,通过使局部吸收量最大化的算法实现了增益矩阵自适应控制。结果表明, 自适应算法不仅使反馈循环的吸收总功率最大化,而且这组反馈增益非常接近能够使测量面板的动能最小的值。KUMAR等[5]进行了柔性梁上压电作动器、传感器优化布置的研究,得出结论作动器、传感器的最优位置应在模态应变能较高的区域内。马天兵等[6]进行了智能结构振动主动控制研究,研究结果表明该方法具有很好的控制效果和鲁棒性。浦玉学等[7]研究了结构振动主动控制算法,提出基于次级通道在线辨别的变步长振动主动控制算法,结果表明该控制系统对简支梁振动响应有较好的抑制作用。
对水中船舶结构的振动控制需要考虑水的加载效应对结构振动的影响,因此,不能将现有的适用于空气中结构振动主动控制的理论简单的加以应用。本文基于可压缩流体加载下的无阻尼实模态矩阵,建立了考虑流体加载效应的水下平板结构振动的降阶模型,并对其进行了振动主动控制的数值仿真和实验研究。研究了基于降阶模型的水下结构振动主动控制方法,简化了主动控制系统。通过模型实验验证了主动控制对水下结构振动的抑制效果。为水下结构振动主动控制提供了新的参考。
1 理论
1.1 水下结构振动的实模态矩阵
结构在简谐激励力作用下,并且考虑流体加载效应的有限元形式的运动方程为[8]:
(-ω2Ms+iωC+K)x=Ff-DTp
(1)
式中:ω为激励圆频率;i=(-1)1/2;Ms、C和K分别为结构的质量矩阵、阻尼矩阵和刚度矩阵;x为结构位移向量;F为外力位置矩阵;f为外激励力向量;D为转换矩阵;矩阵T=∫SHTHdS,H为形状函数矩阵,S为结构湿表面;p为结构表面流体压强向量。结构表面流体压强向量p和表面法向速度向量vn的关系式为
p=Zvn
(2)
式中:Z为声阻抗矩阵。对水中平板结构,结构表面流体压强和结构表面法向振速的关系式可通过对板表面Rayleigh积分[9]进行离散得到。
结构表面法向速度向量vn、结构有限元节点速度向量v和结构位移向量x之间的关系式可表示为:
vn=DTv=iωDTx
(3)
将式(2)和式(3)代入式(1)得:
(-ω2Ms+iω(C+DTZDT)+K)x=Ff
(4)
式(1)和式(4)中的流体加载项DTp或iωDTZDTx所表示的流体加载效应体现为流体附加质量Ma和流体附加阻尼Ca:
DTp=iωDTZDTx=(-ω2Ma+iωCa)x
(5)
将水视为可压缩流体,对第i阶水中结构模态,与其固有频率ωi对应的附加质量矩阵Ma为[10]
(6)
求解由刚度矩阵K和质量矩阵M=Ms+Ma确定的广义特征值问题,可得结构在可压缩流体加载下的实模态矩阵Φ。由于空气中的结构振动一般可以不考虑流体的加载效应,所以对空气中不考虑流体加载效应的情况,其实模态矩阵可直接使用结构的质量矩阵Ms和刚度矩阵K来确定实模态矩阵。
1.2 结构振动降阶模型的建立[11]
所求解的结构模态向量满足正交关系:
ΦTMΦ=m
(7)

(8)
将式(8)代入到式(7)中,就得到单位矩阵,也就是式(7)通过新模态矩阵实现归一化。利用这个关系将式(7)改写,就得到建模方法的关键式为
(9)
(10)
同时,如果含有q个模态向量成分,则各误差项用模态向量成分的函数来表示:

(11)
式中:φ是重新排序的模态成分φq构成的模态向量。重新定义的模态向量φ的修正向量设为δφ,为了使误差向量ε为0,因此有:

(12)
(13)
则使用最小范数解,通过一般化逆矩阵,式(12)的修正向量为
(14)
由以上数据对比可以看出,实验后实验班在颠球、20 m脚内侧运球过杆、脚内侧定点射门三个项目成绩高于对照班,其颠球技术具有非常显著的差异。
1.3 结构振动主动控制
1.3.1 结构状态空间运动方程

(15)
式中:x为降阶后模型的位移变量。
将该运动方程转换至状态空间写为[2]

(16)
式中:X及系数矩阵A、B、E分别为
(17)
观测向量y为:
y=CxX
(18)
式中:Cx为观测矩阵。与选取的点是否能够满足可观测条件有关。
对系统施加的状态反馈为
u=-GX
(19)
式中:G即为状态反馈增益矩阵,本文将使用LQ控制和结构主动变刚度控制两种方法对结构振动进行控制,求解状态反馈控制力。
1.3.2 LQ控制理论
振动控制力求尽可能降低控制力所需的能量的同时,提高振动控制的效果。使二次形式性能指标函数最小化的最优控制理论,被广泛应用,称为线性二次型最优控制,即LQ控制。
定义系统的二次型性能指标函数为[13]
(20)
式中:Q是与状态向量有关的加权矩阵的非负正定矩阵(Q≥0);R为与输入向量相关的加权矩阵的正定矩阵(R>0),通过选取Q和R来取得振动特性和输入能量之间的平衡。使性能指标函数最小的u可以求得为:
u=-R-1BTPX=-GX
(21)
式中:P是通过求解Riccati(黎卡蒂)方程
PA+ATP-PBR-1BTP+Q=0
(22)
的正定解来得到。
在Matlab的工具箱中提供了求解二次型状态调节器问题的函数。将系统的状态空间模型等作为输入参量,则输出参量为最优反馈增益矩阵。
1.3.3 结构主动变刚度控制
结构主动变刚度控制是通过改变结构的附加刚度,使结构控制系统的固有频率远离干扰频率,避免结构发生共振,从而减小结构响应[14]。
首先,要给定一个受控后结构的各阶固有频率Ω1,Ω1应区别于结构受控前的固有频率ωi,并远离激励圆频率ω。结构实施主动变刚度控制后结构系统刚度阵为K1:
(23)
式中:ΔK为控制模型的附加刚度。受控后结构的运动方程为:

(24)
则状态反馈控制力为
u=-ΔKx
(25)
式中:ΔK即为主动变刚度控制中的位移反馈增益矩阵。
2 数值仿真
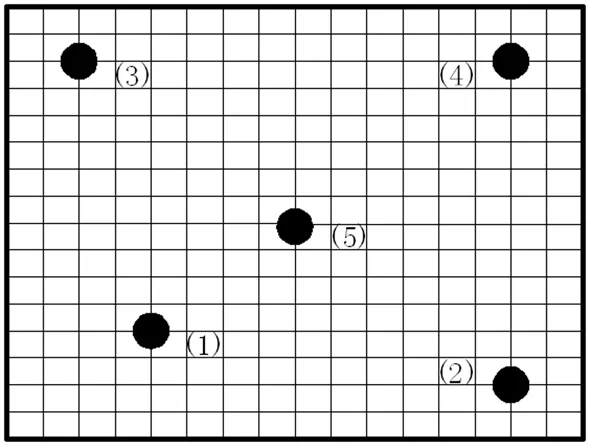
模型降阶主动控制的仿真分析以水中钢质平板为算例,平板长0.455 m,宽0.379 m,厚0.003 m,钢密度为7 800 kg/m3,泊松比0.3,杨氏模量2.1×1011Pa,四周简支。水介质密度1 000 kg/m3,水中声速1 500 m/s。计算中采用四边形四节点等参元对结构进行离散,网格为16×16,其中有限元为基于Mindlin板弯曲理论的板元,板表面Rayleigh积分的离散使用和有限元计算同样的网格[15]。流体加载效应引起的模态阻尼比基于文献[12]中的方法得到,按文献[15]:流体加载引起的前五阶模态阻尼比为:0.601 98%、0.002 26%、0.003 80%、0.000 07%、0.420 42%。如图1所示,在结构的点1和点5位置处,分别受到幅值为1 N法线方向的外部激励Fa和Fb。以结构的前五阶模态作为振动控制对象,需要在结构的节点中选取5个点作为降阶模型的观测点和控制点,将计算获得的状态反馈控制力u以简谐激励的形式施加在各个控制点上,对降阶模型实施主动控制,如图2所示。
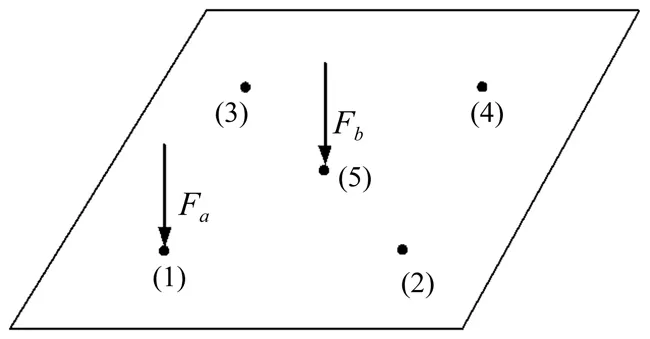
图1 模型结构示意图Fig.1 The underwater flat structure
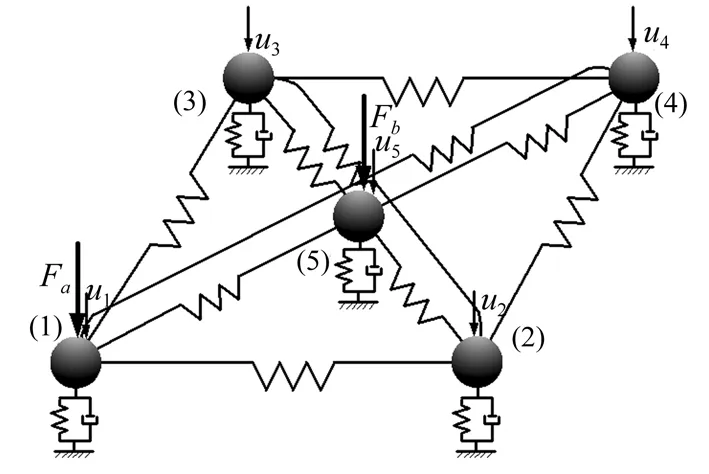
图2 降阶模型示意图Fig.2 The reduced order model
尝试按照若干种不同方案选定观测点和控制点位置,现罗列其中三种方案,如图3所示。按照不同的选点方案将平板结构模型进行降阶处理,得到降阶模型的振动频响曲线,与原始模型相对比,如图4所示。由图中可知,选取不同方案时,降阶模型的精确度不同,其中方案1和方案2降阶模型的频响曲线与原始模型相去甚远,因此不宜采用这两种方案。而方案3降阶模型的振动频响曲线与原始模型的整体上最为接近,因此,按照方案3选取节点作为降阶模型的观测点和控制点,将平板结构简化为五质点降阶模型。
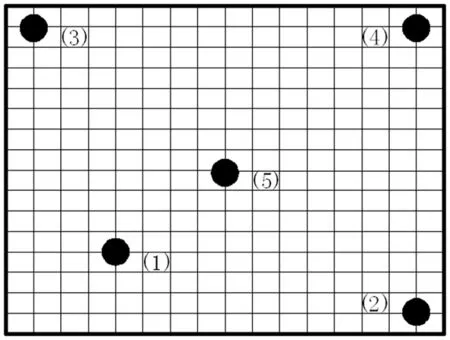
(a) 观测点和控制点选取方案1
(b) 观测点和控制点选取方案2
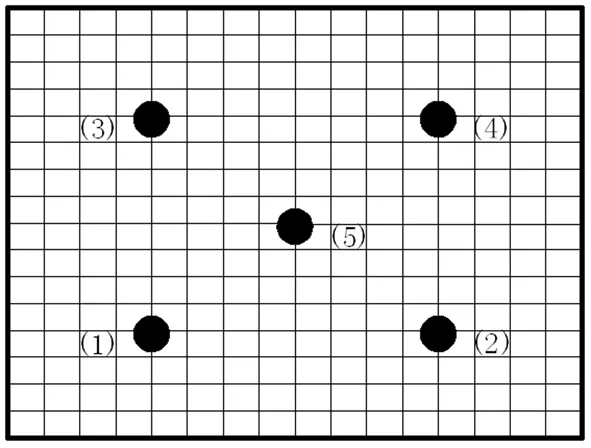
(c) 观测点和控制点选取方案3图3 观测点和控制点选取方案Fig.3 Arrangement of observation and control points
以降阶模型的质量阵、刚度阵和阻尼阵建立运动方程,计算模型在观测点处的振动速度级(dB,参考值:10-9m/s)与原始模型进行比较,分析降阶模型的准确性。降阶后,模型的质量矩阵,刚度矩阵和阻尼矩阵分别为:
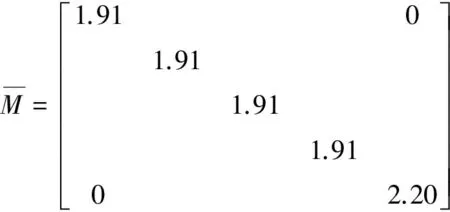
(26)
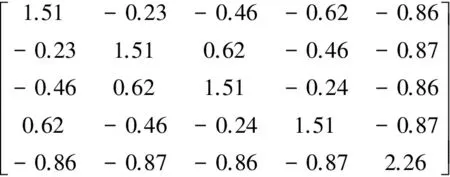
(27)
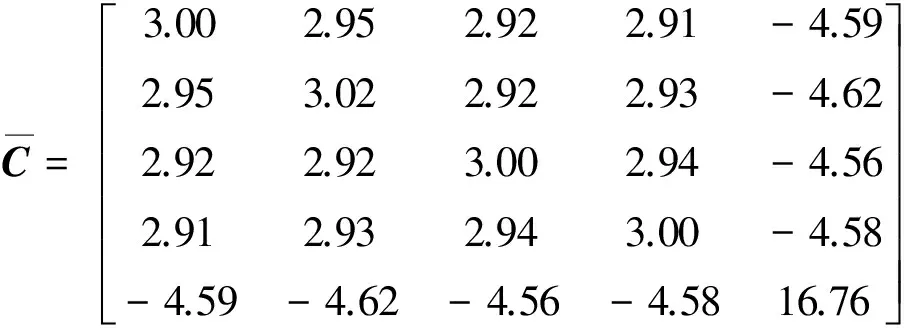
图5为两种不同外力加载情况下结构的振动速度级曲线。其中图(a)为外部激励施加在点1时,点2的振动速度级曲线,图(b)为外部激励在点5时,点1处的振动速度级曲线。由图可知考虑前五阶模态的低元化模型,在210Hz以内的频率响应与原始模型总体上吻合较好,振动速度曲线与原始模型曲线基本一致。误差可以控制在5dB以下,对于不同的外力施加位置,降阶模型响应曲线可以较好的吻合原始模型在观测点处振动速度级曲线。


图4 观测点和控制点选取方案精确度比较Fig.4Comparisonofobservationandcontrolpointsarrangement图5 原始模型与降阶模型结构振动速度比较Fig.5Comparisonofstructuralvibrationvelocitiesbetweenoriginalmodelandreducedordermodel
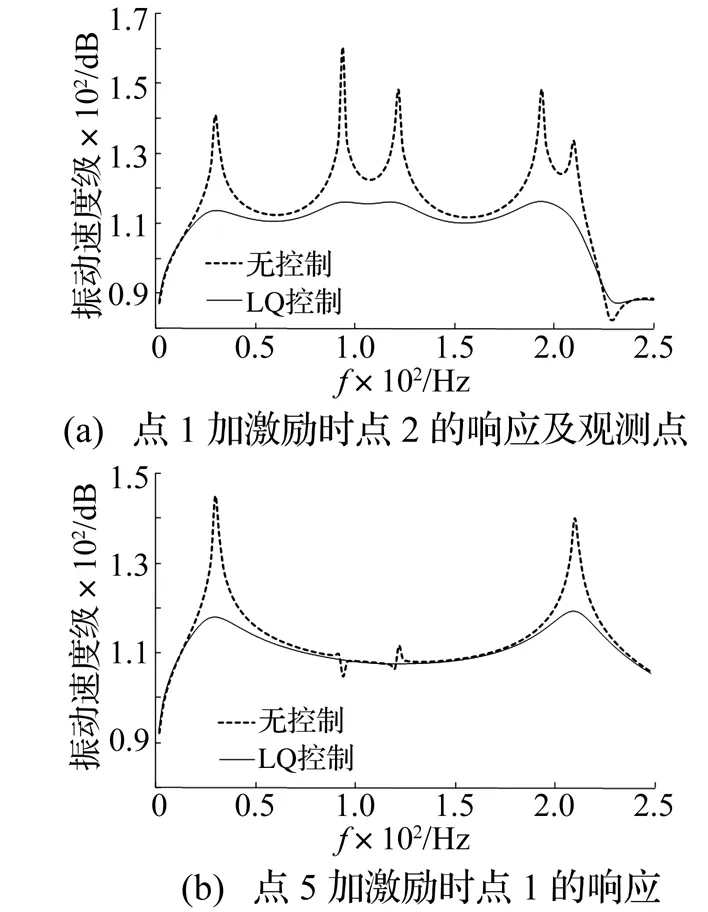
图6 结构受LQ控制前后振动速度级比较Fig.6 The structure vibration velocity before and after LQ control
在降阶模型的基础上,对水下平板结构实施LQ控制,加权矩阵R和Q分别为R=[I]5×5,Q=105×[I]10×10,所得的反馈增益矩阵随外部加载力的频率相应变化,板所受不同频率的外部载荷激励时,计算生成的反馈控制力不同,将计算求得的状态反馈控制力施加在控制点1~5点上,求解受控后模型的在观测点处的振动速度级。两种不同的外部激励施加工况下,结构受LQ控制前后振动速度级分别与原始模型进行比较,如图6所示。图(a)为在点1施加外部激励时,受控前后点2的振动速度级曲线。图(b)为在点5施加外部激励时,受控前后点1的振动速度级曲线。从图中可以很明显的看出受到LQ控制的模型振动速度级显著降低,特别是峰值减幅明显,降低了约44 dB。结构受控后的振动响应已看不到明显的共振峰,结构的共振响应明显降低,且控制没有改变结构的固有频率,受控后结构的振动特性得到明显改善。
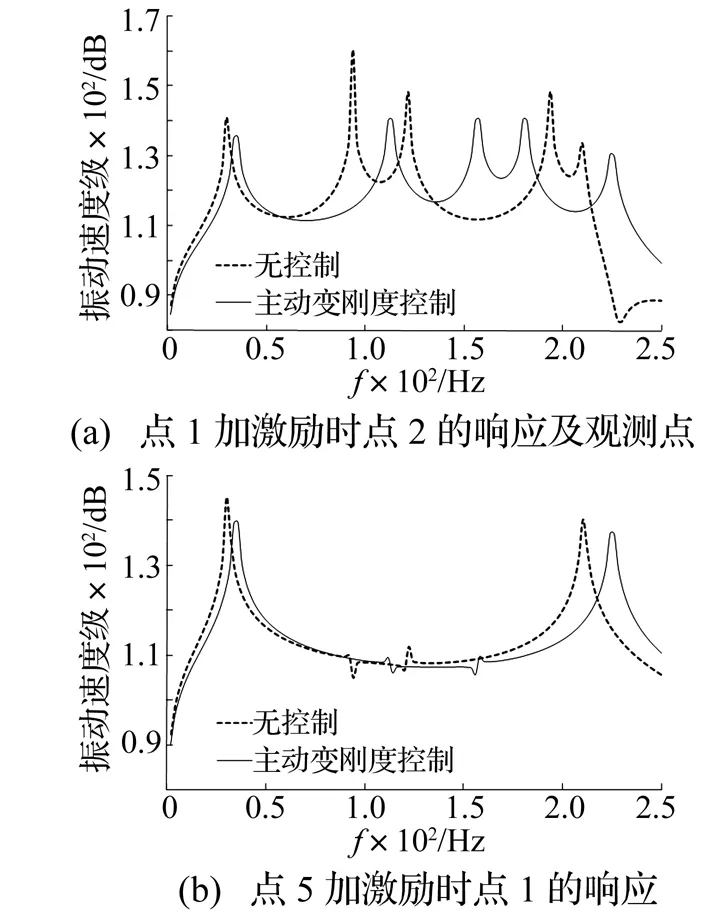
图7 结构受主动变刚度控制前后振动速度级比较Fig.7 The structure vibration velocity before and after active variable stiffness control
对结构实施主动变刚度控制,首先,按照远离结构的固有频率和激励圆频率的原则设定模型受控后固有频率。模型前五阶的固有频率及设定受控后固有频率如表1所示。然后,基于式(23),计算求得实施变刚度控制后系统刚度阵K1,再得到K1与不受控模型的刚度阵的差值作为位移反馈增益矩阵,进而确定状态反馈控制力。最后将反馈控制力施加在点1~5上,受控前后结构的振动速度级比较如图7所示,图(a)为在点1施加外部激励时,受控前后点2的振动速度级曲线。图(b)为在点5施加外部激励时,受控前后点1的振动速度级曲线。可以看出结构受到变刚度控制后,在振幅下降的同时曲线共振峰出现明显偏移。模型在受到主动变刚度控制后,结构频响曲线的峰值出现在设定的固有频率处,幅值有所下降,最大减幅达到45 dB,但是频响曲线起伏趋势依然较为明显。主动变刚度控制并没有改变结构原有频响曲线的趋势,只改变了结构固有频率。
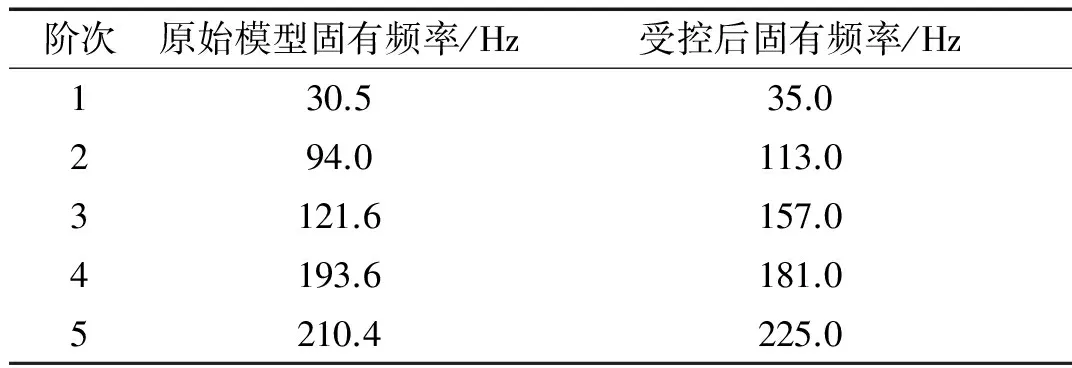
表1 原始模型固有频率及受控后固有频率
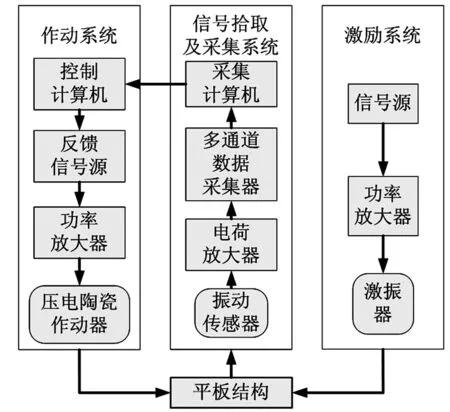
图8 测试系统框图Fig.8 Test system
3 实验研究
模型实验可以更直接的反映出主动控制对水下结构振动的影响效果。测试系统主要包括结构主体、激励系统、反馈系统、数据采集系统,测试系统框图如图8所示。实验模型如图9所示,板长0.455 m,宽0.379 m,厚0.003 5 m,船用钢材质,四边由夹具固定,实验在消声水池中进行。

图9 平板结构模型实物图Fig.9 Picture of flat plate
逐一针对水下平板结构振动各个峰值频率施加主动控制,由激振器在1点位置对平板结构施加单频原始激励,由1~5号位置振动传感器拾取振动信号,分析测量结构振动响应,根据LQ主动控制算法,由原始激励、各测点结构振动响应计算1~5号控制点所需的控制力,通过作为次级振源的压电陶瓷施加到平板结构上,实现水下平板结构各个峰值频率结构振动主动控制,列表显示结果如表2所示。
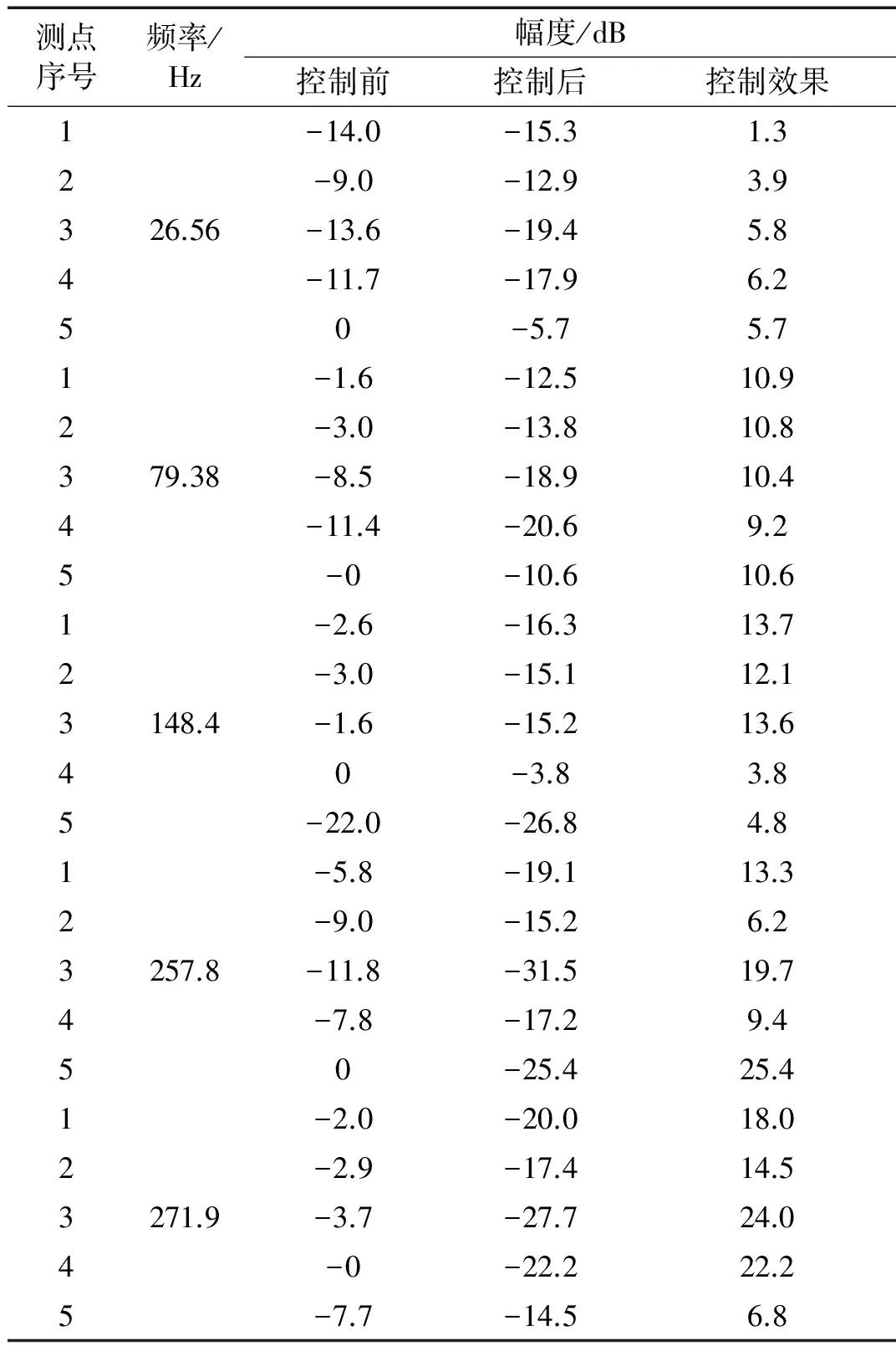
表2 受控前后各个测点振动响应对比
由表2中可知,结构由于受到主动控制的影响,在各个测点处的振动速度级均有所下降。 施加主动控制后,在26.56 Hz频点下,点4控制效果最明显,约为6.2 dB,点3、点5位置控制效果也有约6 dB的控制效果。在79.38 Hz频点下,各测点处控制效果均较为明显,在9~11 dB之间。通过结果对比,LQ主动控制可以有效降低平板水下第2个峰值频率的结构振动响应。在148.4 Hz频点下,主动控制对测点1~3处结构振动均取得了较好的控制效果,在12~14 dB之间。在257.8 Hz和271.9 Hz频点下,针对水下平板结构振动进行LQ主动控制,各个测点均到达了较为理想的效果。
4 结 论
本文基于模型降阶对水下结构进行了仿真及实验研究,通过主动控制方法降低了水下结构振动。通过对计算及实验结果的分析和比对,得到以下结论:
(1)可以通过主动控制的方法有效抑制水下结构的振动响应,尤其是低阶峰值频点处的振动响应。
(2)LQ控制能够降低结构的振动速度级幅值,但不改变水下结构的固有频率,使结构的频响曲线趋势平缓。
(3)结构主动变刚度控制能有效规避外界激励力频率与水下结构固有频率重合造成的共振,以此降低振动速度级。
(4)降阶模型能够降低水下结构的维数,减少主动控制中所使用的传感器和作动器的数量,使振动主动控制系统的设计更加简单。
(5)模型实验研究表明和验证了基于降阶模型的水下结构振动LQ控制可以有效降低水下平板结构振动响应。
[ 1 ] 王国治. 舰艇机械结构的耦合振动及水下噪声控制[C]//中国造船工程学会学术论文集.中国烟台, 2005:34-42.
[ 2 ] FULLER C R, ELLIOTT S J, NELSON P A. Active control of vibration[M]. San Diego, Academic Press, 1996.
[ 3 ] 顾仲权,马扣根,陈卫东.振动主动控制[M].北京,国防工业出版社,1997.
[ 4 ] ZILLETTI M, ELLIOTT S J, GARDONIO P, et al. Experimental implementation of a self-tuning control system for decentralised velocity feedback[J]. Journal of Sound and Vibration,2012, 331(1):1-14.
[ 5 ] KUMAR K R, NARAYANAN S. Active vibration control of beams with optimal placement of piezoelectric sensor/actuator pairs[J]. Smart Materials & Structures, 2008, 17(5):6777-6790.
[ 6 ] 马天兵,裘进浩,季红丽,等. 基于鲁棒模型参考控制器的智能结构振动主动控制研究[J].振动与冲击, 2012,31(7):14-18. MA Tianbing, QIU Jinhao,JI Hongli,et al. Vibration control of piezoelectric flexible structure based onusynthesis[J]. Journal of Vibration and Shock, 2012,31(7):14-18.
[ 7 ] 浦玉学,张方,姜金辉. 变步长自适应结构振动主动控制算法[J]. 振动与冲击,2015,34(10):199-205. PU Yuxue, ZHANG Fang, JIANG Jinhui.A varying step adaptive algorithm for structural vibration active control[J]. Journal of Vibration and Shock, 2015,34(10):199-205.
[ 8 ] EVERSTINE G C, HENDERSON F M. Coupled finite element/boundary element approach for fluid-structure interaction. [J]. Journal of the Acoustical Socjety of America,1990, 87: 1938-1947.
[ 9 ] FAHY F. Sound and structural vibration: radiation transmission and response [M]. London, Academic Press, 1985.
[10] MCCOLLUM M D, SIDERS C M. Modal analysis of a structure in a compressible fluid using a finite element/boundary element approach [J]. J. Acoust. Soc. Am., 1996, 99: 1949-1957.
[11] 背户一登. 结构振动控制[M]. 马立新,李孜. 北京:机械工业出版社,2011:106-108.
[12] LI Xianhui, LI Sheng. Modal parameters estimation for fluid-loaded structures from reduced order models[J]. Journal of the Acoustical Society of America, 2006, 120: 1996-2003.
[13] SETO K, REN M, DOI F, Feedback vibration control of a flexible plate at audio frequencies by using a physical state-space approach [J]. J. Acoust. Soc. Am, 1998, 103 (2), 924-934
[14] 欧进萍, 结构振动控制——主动、半主动和智能控制[M]. 北京:科学出版社:2003.
[15] LI Sheng, LI Xianhui. The effects of distributed masses on acoustic radiation behavior of plates[J]. Applied Acoustics, 2008, 69(3): 272-279.
Active vibration control simulation and experiment studies of underwater structures based on a reduced order model
YU Danzhu, LI Sheng
(State Key Laboratory of Structural Analysis for Industrial Equipment, Faculty of Vehicle Engineering and Mechanics, School of Naval Architecture, Dalian University of Technology, Dalian 116024, China)
In order to effectively suppress vibration of an underwater structure, its active vibration control simulation and experiment studies were implemented based on a reduced order model. The compressible fluid-loaded undamped modal matrix was used to build the reduced order model of the underwater structure. Due to dimension number’s reduction, a simplified vibration active control system was designed to decrease the number of sensors and actuators. Active control of underwater structural vibration of a plate was simulated with the linear quadratic(LQ)control method and the variable stiffness control method, respectively. The simulation results showed that the plate’s vibration amplitude is quite well controlled with the LQ control method, while the natural frequencies of the plate can be changed according to requirements with the variable stiffness control method; based on the reduced order model, the active control is relatively easy to implement and the experimental results verifies the vibration reduction effects of active control technique on underwater structures.
underwater structure; reduced order model; vibration active control; LQ optimal control; variable stiffness control; experimental study
2015-09-16 修改稿收到日期:2016-01-17
于丹竹 女,博士生,1985年7月生
黎胜 男,教授,博士生导师,1973年5月生 E-mail:shengli@dlut.edu.cn
U663.2
A
10.13465/j.cnki.jvs.2017.03.012
