一种高稳定性重载升降系统设计与仿真分析
2017-03-08陈世杰王庆虎徐焕焕
陈世杰,王庆虎,徐焕焕,宋 健
(安徽恒诺机电科技有限公司, 安徽 六安 237000)
引 言
中国第一架商用飞机C919地面指挥舱的举升系统要求负载不小于6 t,压缩高度不大于650 mm,举升高度不小于2 850 mm, 8级风工况下,上下平台的晃动量小于±10 mm,10级风工况下设备不破坏。
目前,国内常见的大压缩比和大行程举升系统有剪刀撑式、多级丝杠式、多级液压缸式以及柔性柱式。剪刀撑举升系统其受力和导向为一体式,其承载一般不高,且晃动量较大;多级丝杠式和多级液压缸式举升系统体积小,一般应用在具有翻转功能产品上,但其传动效率和可靠性较低,且不适合该项目技术特点;柔性柱[1]式可将水平运动转化为直线运动,但其不能承受侧向力,无法保证晃动量。
基于以上举升系统的特点,本文提出以柔性柱为基础承载垂直方向力,利用剪刀撑机构为导向的一种新的设计方法,并通过有限元分析和试验测试来验证该设计方法是否满足C919地面指挥舱举升系统所提出的指标要求。
1 升降系统传动原理及特点
1.1 系统概述及工作原理
系统由上平台、下平台、半挂车、调平撑腿、柔性柱及其他柔性辅助装置(包括折叠拉杆、剪刀撑、斜拉杆)等组成,如图1所示。半挂车是整个升降设备的载体,其侧面装有4组机电调平撑腿;升降系统下平台与半挂车螺栓连接,4组柔性柱、2组一级剪刀撑、4组折叠拉杆、4组斜拉杆安装在上下平台之间;指挥舱与上平台螺栓连接。

图1 机电升降塔整体布局示意图
考虑到方舱底部尺寸为5 000 mm × 2 500 mm(长×宽),质量为4.5 t,而选择柔性柱的截面尺寸为136 mm ×99 mm(承载2.3 t),所以采用4组对称布置的柔性柱装置组成升降的执行机构,其压缩高度为420 mm,且由一台电机输出,通过两种刚性联轴器和两级减速机带动其动作,能够保证整个系统的同步性,如图2所示。

图2 传动系统方案
工作时,必须先将整个升降系统进行调平(升降系统所有的动作全都建立在自动调平的基础上),然后解除快速锁定机构(手动反螺纹结构,用于运输时锁紧上下平台)。通过人工按键向控制系统发送举升指令,指令通过可编程逻辑控制器(PLC)集中处理后再传到电机端,解锁双制动器并带动电机的转动[2-5];电机直接带动一级减速机,一级减速机为同轴双向输出,通过2个十字万向联轴器带动2个二级减速机,二级减速由双向输出轴通过刚性联轴器再带动4组柔性柱上升;柔性柱顶着上平台再带动折叠拉杆、剪刀撑进行上升动作。当举升到位时(接近开关判断),系统停止动作,电机抱闸制动,剪刀撑锁定,折叠拉杆预紧。此时,再将4组斜拉杆取出,相互斜交叉挂在上下平台对应支耳处并锁紧。
撤收时,必须先将斜拉杆拆下放入下平台对应的存放位置。当存放斜拉杆位置上接近开关点亮时,按下撤收按键系统才会有反应,否则系统不动作。当撤收到位时(接近开关点亮)系统停止动作,电机抱闸制动,最后锁上快速锁定机构。
1.2 柔性柱传动装置
柔性柱是由一节一节的方柱铰接而成,具有刚性体特性。如图3所示,传动箱内部的链条为水平放置,在驱动齿轮处将链条柱节的水平运动转化为垂直运动,以实现平台的垂直升降。它的优点是能将水平运动直接转化为垂直运动、重复定位精度高、压缩空间小、无污染等。
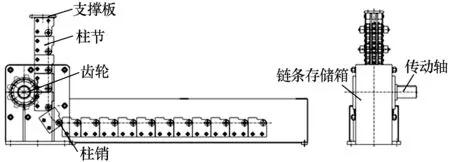
图3 柔性柱装置结构示意图
1.3 系统稳定性
柔性柱是将水平运动转化为竖直运动,由图3可以看出单个柱节围绕柱销转动的自由度不是完全约束的,整个上平台的受力简化示意[6]如图4所示。结合图1和图3,在长度方向上柔性柱整体有向中间弯曲的趋势,对每个柱节而言,也都有向中间转动的趋势。这对于该升降系统而言,是不稳定的,尤其是处于工作状态时,侧向风载的随时变化都会对该结构产生影响。

图4 上平台受力示意图
因此,在长度方向上需要增加一种限制柔性柱节转动的抗拉装置,考虑其要随平台同步升降,采用折叠拉杆的方式解决这一问题如图5所示。在宽度方向上,由于柔性柱装置、折叠拉杆和上下平台组成的是不稳定的平行四边形结构,所以增加斜拉杆构成三角结构以提高抗风稳定性,各稳定性结构功能见表1。
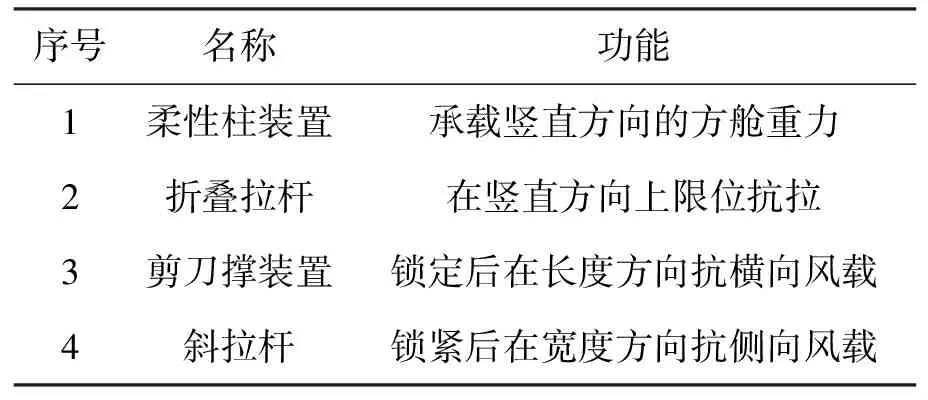
表1 各稳定性结构功能表
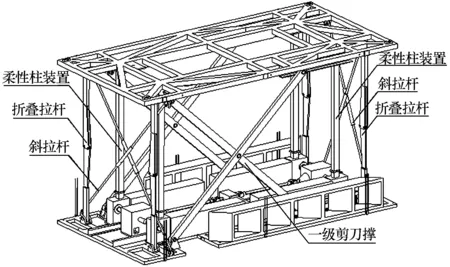
图5 稳定性功能结构图
2 稳定性结构设计
2.1 折叠拉杆
折叠拉杆如图6所示,限于压缩高度和自动折展功能要求,折叠拉杆旋转中心为偏心设计,以保证拉杆顺利的撤收,拉杆旋转中心旁边留有一半5 mm深缺口的限位轴,用于在上升到位时的限位,同时起到抗拉作用。
图6 折叠拉杆结构动作示意图
如图6所示工作时,平台上升带动折叠拉杆从收拢极限状态沿展开方向动作,固定旋转轴为上下拉杆的旋转中心,两个拉杆限位半圆轴绕着固定旋转轴旋转,上、下平台支耳始终在一条直线上运动,当平台上升到位时,限位半圆轴旋转到位,互相啮合;撤收时,由于上下两杆的固定旋转轴(即旋转中心)与上、下平台支耳中心构成的三点不共线,因此在柔性柱拉力和拉杆自重的作用下,上平台支耳的Fb和下平台支耳的Fc交汇到固定旋转轴处会产生有一个横向的力Fa,在Fa的作用下,折叠拉杆便会自动沿着撤收方向自动折叠。
2.2 剪刀撑
剪刀撑按照级数可以分为一级、两级、多级;按照驱动形式可以分为液压式、机械式、机电式;按照驱动单元放置的形式又可分为水平式、垂直式、斜放式[7-8]。
该升降系统由于压缩高度只有650 mm,平台总长却达到5 000 mm,因此只能选择一级剪刀撑结构形式,如图7所示。该剪刀撑主要作用有两方面:一方面作为整个系统的升降导向;另一方面当系统举升到位后,对剪刀撑的滑块机构进行锁定,可以提高长度方向的抗风稳定性。
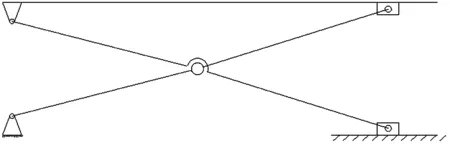
图7 一级剪刀撑结构伸缩形式示意图
考虑到剪刀撑旋转轴处有防盐雾、防霉菌、防湿热的要求,旋转轴除了表面三防处理外,还要在旋转摩擦部分进行结构密封,如图8所示。工作时,通过油杯向轴内部注入润滑油,由于端面密封件的存在,油被锁在内部形成油膜,延长旋转轴使用时间。
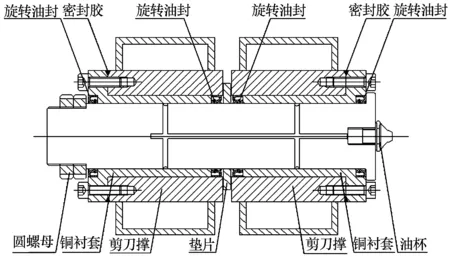
图8 剪刀撑旋转结构密封示意图
2.3 斜拉杆
斜拉杆结构如图9所示,分为下斜拉杆和上斜拉杆两部分,两个部分均有挂钩。下斜拉杆在圆管外面套有外螺纹衬套,外螺纹衬套和圆管之间配有尼龙衬套,可以顺着圆管滑动,它与把手螺母相配且通过装在下斜拉杆端部的螺柱进行限位。上斜拉杆的尾部也有一段螺纹圆柱,用于和把手螺母相配。使用时,只需要将把手螺母旋上上斜拉杆的螺纹并拉紧即可。

图9 斜拉杆结构密封示意图
斜拉杆在系统长度方向上共前后两组布置,每一组互相交叉排布,如图10所示,在每一组的两个上斜拉杆交叉处都安装有抱箍(抱箍可以沿着每个杆子调整位置),抱箍和抱箍中间通过螺纹销轴进行连接,形成三角形结构。
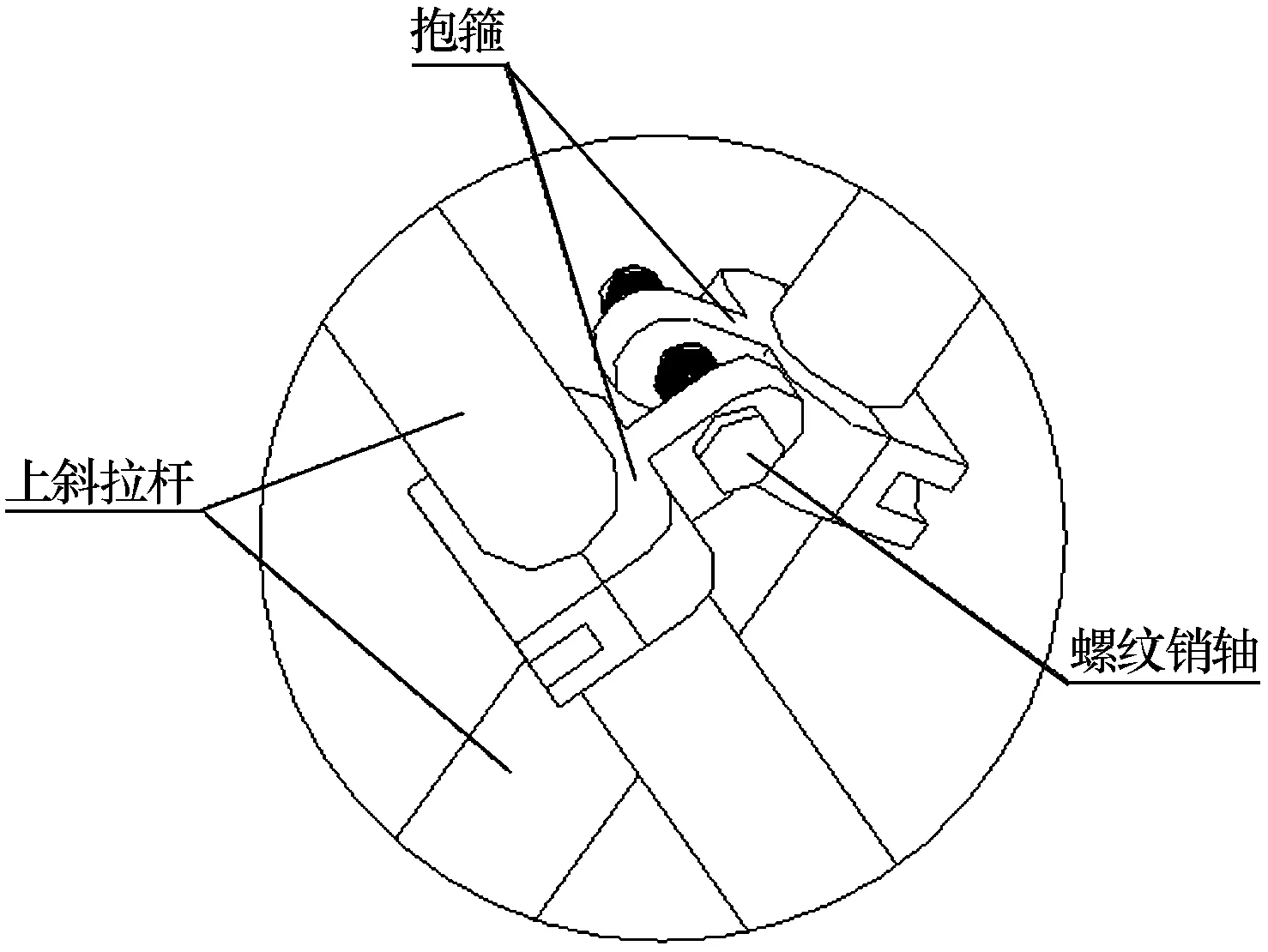
图10 斜拉杆固定结构密封示意图
3 系统有限元分析
3.1 有限元模型定义
根据系统的结构形式,建模时进行一定的简化,去除对结构力学性能影响较小的倒角、小螺纹等细节特征[9]。有限元模型如图11所示,总质量为8.745 t,其中上平台负载为6 t,2个电机共460 kg,4组柔性柱装置共920 kg,其他采用质量单元进行等效。模型共268 698个单元,264 006个节点。系统结构材料为Q345D低合金结构钢。

图11 升降塔有限元模型
有限元模型所用的坐标系定义如下:坐标原点为下框架安装面的几何中心,向上方向为+Y方向,下框架宽度方向为Z向,下框架长度方向为X向,三方向满足右手准则。需要指出的是,由于当阵风沿Z方向加载时,只有一侧一个斜拉杆起作用,因此仅保留模型中的一侧斜拉杆进行分析计算。
边界条件为固定底座安装孔位置全约束。
力学环境条件分别为:8级风,正常工作;10级风,结构不被破坏。
3.2 载荷计算及分析
作用于结构上的风载荷F采用以下公式计算:
F=CFqA=1/2CFρ(ηκυm)2A
(1)
式中:CF为风阻系数,按实心平板取1.2;ρ与空气密度相关,取0.125 kg·s2/m4;η为风高系数,取10 m高度的风速修正系数,η=1;κ为阵风因子,按《军用地面雷达通用规范》要求,阵风风速与平稳风速的比值为1.5,因此取κ=1.5;υm为平稳风速,即指标要求中的风速值;A为天线的特征面积,迎风面A=12.5 m2。
根据公式(1)计算得到:8级风速时,单个天线风载荷为903.85 kg;10级风速时,单个天线风载荷为1 701.34 kg。
3.3 分析结果及汇总
系统一共在6个工况下进行有限元分析,工况1:8级风Z向加载;工况2:自重8级风X向加载;工况3:自重8级风45°加载,分析结果见表2。
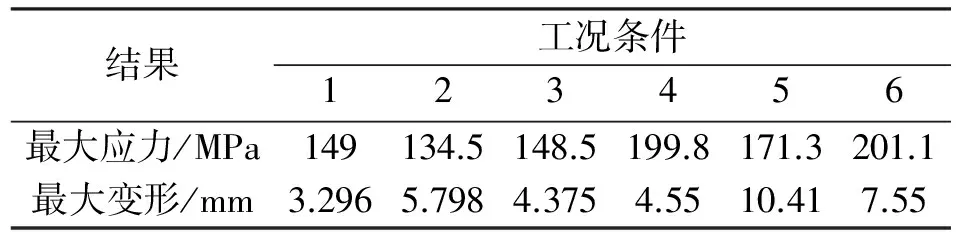
表2 各种工况分析表
从表2中可以看出8级风速下系统最大变形为5.798 mm,小于系统技术指标10 mm;10级风速下系统最大应力为201.1 MPa,小于系统材料Q345D的屈服强度345 MPa。所以,从分析结果来看,方案合理可行。
4 加载试验
为了进一步验证整个升降系统是否确实满足抗风稳定性要求,经与客户协商使用以下方法进行加载试验如图12所示。

图12 试验方案原理示意图
将整个系统放置在一水平平台上,下平台与该水平平台螺栓紧固。立一根固定直杆在水平平台上并靠着上、下平台,并在上平台上利用直杆标记竖线。根据计算的8级风载,在上平台的Z方向和X方向(各取3等分点)分别加载相应的负载,此时上平台会向加载的方向偏移,再利用直杆对上平台标记。通过测量两次标记刻度的距离来读出相应的位移量,即约定为8级风载下Z方向和X方向的晃动量,见表3。

表3 8级风模拟情况下系统晃动量(近似值)
从表2可知,模拟8级风情况下,系统在Z方向的位移最大,约为7.5 mm。与实际差别主要是由装置时各零部件的间隙及制造误差造成,但依然满足系统指标要求。
5 结束语
该产品是将机电调平和举升系统集成为一体的智能控制系统,采用柔性柱的举升机构,辅以折叠拉杆和斜拉杆的结构,系统整体从柔型结构转化为刚性结构并解决了系统稳定性问题。该产品在8级风的工况下上下平台相对晃动量小于±10 mm,满足研制的技术指标。整机性能稳定,运行可靠,总体技术处于国内领先水平。
[1] 潘向群. 柔性传动柱装置: 中国, 201010218464.1[P]. 2012-01-11.
[2] 阎树田, 叶军, 汤子龙. 基于PROFIBUS DP的水平驱动剪刀撑升降台控制系统[J]. 兰州理工大学学报, 2005, 31(3): 47-50.
[3] 郭华. 舞台机械设备控制系统上位机监控软件的实现[J]. 计算机自动测量与控制, 2001, 9(4): 30-33.
[4] 陈在平, 赵相宾. 可编程序控制器技术与应用系统设计[M]. 北京: 机械工业出版社, 2002.
[5] 张燕宾. 变频调速应用实践[M]. 北京: 机械工业出版社, 2002.
[6] 刘鸿文.材料力学[M].5版. 北京: 高等教育出版社, 2012: 174-188.
[7] 刘明强. 剪刀撑顶升子母柱升降台动力计算[J]. 甘肃科技, 2013, 29(17): 62-64.
[8] 魏发孔. 水平驱动剪刀撑乐池升降机的动力性能研究[J]. 甘肃工业大学学报, 1997, 23(4): 48-50.
[9] 石亦平, 周玉蓉. ABAQUS有限元分析实例详解[M]. 北京: 机械工业出版社, 2010.
